基于ARM的双轴电磁计程仪技术研究
2018-01-03 06:26:56张德会
船舶 2017年6期
毕 彦 张德会
(1.驻上海地区水声导航系统军事代表室 上海200136;2.中船航海科技有限责任公司 水声导航室 上海200136)
基于ARM的双轴电磁计程仪技术研究
毕 彦1张德会2
(1.驻上海地区水声导航系统军事代表室 上海200136;2.中船航海科技有限责任公司 水声导航室 上海200136)
为提升电磁计程仪综合测速性能,设计了一种基于ARM控制器的利用电磁感应定律获得船舶两维航行速度的测速系统。以ARM控制器及其外围电路为控制和速度解算核心,配以专用自检模块、信号放大模块、低通滤波模块、调相模块、相敏解调模块、数据采集模块、ARM数据处理及控制模块、显控模块、激磁模块以及电源模块。通过软件,利用曲线逼近法进行误差校正,系统稳定且操作方便。
相敏解调;双轴;信号放大;调相
引 言
计程仪的主要作用是为舰船提供航行速度,保障航行安全。随着舰船技术的发展,其他导航设备也需要计程仪的速度信息参与计算并改进性能。电磁计程仪通过传感器末端的电极采集舰船相对水流的感应电动势速度信息,基于电磁感应定律进行解算,从而获得舰船相对水流航速,并通过计算机算得航行里程信息。
传统电磁计程仪多为单轴测速,仅能测量舰船首尾向速度,无法获得舰船横向速度。并且,以往单轴电磁计程仪集成化程度较低,多为模拟电路设计,接口扩展比较困难,故无法满足日益发展的舰船导航要求[1]。
基于ARM的双轴电磁计程仪以成本较低的ARM为主控芯片,配以高精度数据采集电路、PWM脉冲发射电路、模拟信号放大滤波电路等,集成度高;系统具有串口通信、以太网通信、以及CAN网通信功能,可扩展性强,充分满足各种舰船需求;传感器[5]采用双轴设计,双轴电磁传感器两对电极分别测量舰船的首尾方向以及左右方向速度信号,同时获得舰船两维速度,而单轴电磁传感器仅有一对电极,只能测量舰船首尾方向速度信号;基于Linux操作系统进行软件设计,满足数据计算实时性要求,人机界面美观,采用多屏复用、多种显示形式,操作方便;系统平台成本可控,并可根据功能裁剪,方便市场推广。
1 系统设计方案
根据传感器采集信号走向以及功能进行划分,系统可分为电路自检模块、信号放大模块、低通滤波模块、调相模块、相敏解调模块、数据采集模块、ARM数据处理及控制模块、显控模块、激磁模块以及电源模块。系统功能框图如图1所示。

图1 系统功能框图
系统上电后,电源模块启动对各模块进行供电,电磁传感器从激磁模块获取激磁电压,同时敏感两维速度信号,系统电路自检通过后,速度信号经由信号放大模块、低通滤波模块、调相模块、相敏解调模块前处理后,由数据采集模块通过数据总线传输给ARM数据处理及控制模块进行数据处理,并进行数据发送以及与显控模块的人机交互。
自检模块主要是模拟传感器信号,对电路部分进行自检,方便进行电路故障的排查和定位。进入自检状态可由显控单元进行操作,自检结果在人机交互界面中显示。
信号放大模块接收电磁传感器感应的两维速度信号,频率为50 Hz,由于速度信号为微伏级小信号,首先对其进行放大处理,然后通过低通滤波[4]滤除高频干扰,并对速度信号进行相位调整,使其与基准信号同相,进行相敏解调处理,得出速度信号的方向信息。
数据采集模块对自检后的模拟信号、放大滤波预处理后的速度感应电动势信号进行A/D转换,并将采集的信号通过数据总线实时传输给ARM数据处理及控制模块ARM数据处理及控制模块接收数据采集信息,进行速度解算和航程积分计算,并将解算后的速度和航程信息进行对外发送。同时,ARM数据处理及控制模块与显控模块通过串口进行通信,接收显控模块的控制指令,并将解算信息以及状态信息发送至显控模块界面显示。
显控模块接收ARM数据处理及控制模块的数据信息,并将操作人员的控制指令通过串口发送给ARM数据处理及控制模块。显控模块同时具有对外向用户发送速度信息的能力。显控模块采用ARM处理板与液晶显示屏组合方式进行设计,系统运行Linux操作系统,进行人机界面设计,操作简单。
激磁模块为电磁传感器提供稳定激磁电压,保障电磁传感器激磁信号的稳定可靠。电源模块为各个模块提供直流电源,保障系统正常稳定工作。
1.1 系统硬件设计
系统整体由双轴电磁传感器及其水门阀组件、信号处理机箱、显控单元这三个主要部分组成。双轴电磁传感器示意图见图2。

图2 双轴传感器示意图
该传感器外径75 mm,配备标准内径80 mm的球阀或者闸阀。信号处理机箱含有电路自检模块、信号放大模块、低通滤波模块、调相模块、相敏解调模块、数据采集模块、ARM数据处理及控制模块、激磁模块以及电源模块,显控单元含有显控模块以及电源模块。系统组成框图见图3。
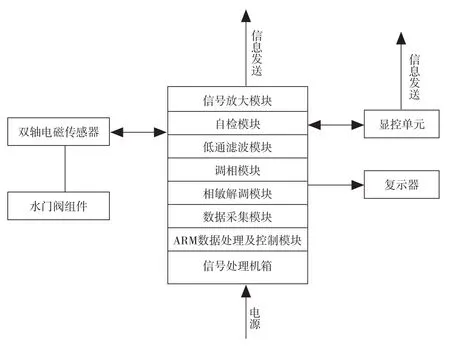
图3 系统组成框图
自检模块由一块标准3U自检电路板组成。自检模块主要包括信号模拟电路、信号切换电路。信号模拟电路完成模拟电磁传感器速度信号的功能,在电磁传感器未接入或排查故障时,模拟传感器信号,对电路进行检查,确认电路是否正常。信号切换电路完成自检信号与电磁传感器信号之间的切换,切换指令有显控模块发出。
信号放大模块、低通滤波模块、调相模块和相敏解调模块由一块前处理电路板完成所有模块功能。在一套双轴电磁计程仪系统中包含两块该前处理板,分别进行舰船首尾方向和左右方向的速度信号放大、滤波、调相、解调等处理。该电路板主要包括高精度差分放大电路、高阶低通滤波电路、电压跟随电路、调相电路、相敏解调电路。差分放大电路放大倍数为500倍,低通滤波电路截止频率为150 Hz,调相电路分为粗调电路和微调电路,相敏解调电路采用精密高速解调芯片,保证解调实时性。
数据采集模块与ARM数据处理与控制模块进行一体化设计,数据采集模块具有6路差分同步采集功能,采样精度为16位,且采样频率软件可调,最高可达200 kHz采样频率。主控芯片采用Cortex-A9双核芯片,运行频率可达1.2 GHz,具有双网口、双串口、PWM输入输出等功能,充分满足系统需求。
显控模块主要由一块7 in液晶显示屏和显示控制板组成。通过RS422串口同ARM数据处理与控制模块相连,实现操作控制与显示功能。显示控制板具有扩展接口功能,可对外进行串口与CAN口的扩展发送功能。
激磁模块实现对电磁传感器的稳定激磁,以提供稳定的交变磁场敏感速度信号。主要由电源转换、带通滤波、低通滤波等电路组成。电源模块主要由电源模块和外围电路组成,包括交流-直流电源转换电路、直流-直流电源转换电路,为激磁模块和系统其他电路供电。
1.2 系统软件设计
系统软件包含两部分,运行于ARM数据处理及控制模块中的系统主程序,以及运行于显控单元的显控程序。
系统主程序基于Linux操作系统开发,根据系统功能需要对Linux操作系统进行裁剪,进行最小化配置,保证算法实时性的实现。软件采用C语言进行编制,实现系统控制、数据处理算法、以及通信等功能,系统流程框图见图4。

图4 系统软件设计流程框图
系统上电之后,软件即开始运行。首先进行系统初始化,读取配置文件等;初始化之后即开始系统自检工作,检查系统电路是否工作正常;自检通过后即开始数据采集、数据存储以及数据处理工作,并根据系统默认控制流程或人工操作指令进入相应工作模式(如人工装订模式或校正模式)。系统软件每50 ms完成一个计算周期,完成计算功能后即进入空闲等待状态。通信模块负责将计程仪解算的速度信息发送给显控模块,进行对外信息发送,并可接收外部信息源速度信息,用于数据融合或速度校正。
显控程序运行于显控单元,主要实现速度信息显示、人机操作、与下位机以及其他设备通信等功能。人机界面示意图见图5,采用基于Linux操作系统的串口屏实现显示功能。该方案利用串口通信即可便捷实现界面显示以及人机操作功能,成本可控且工作较稳定。

图5 人机界面示意图
2 误差校正方法
误差校正方法是保证测速精度满足指标的重要手段。在实际测量过程中,由于传感器附近磁场环境不同以及受其本身制造工艺的影响,使得传感器相对水层速度与其感应电动势之间呈现非线性关系(见图6)。

图6 传感器输入-输出特性曲线
为校正电磁计程仪系统误差,并消除安装环境以及传感器非线性误差,电磁计程仪在装船后必须进行测速标定试验,以确定在特定安装环境下,其速度感应信号输出特性曲线的大致形状,并根据传感器特性,用计算机可实现的方法逼近实际特性,求得实际输出特性的(满足精度要求)近似计算模型,以消除理论曲线和实际曲线不同产生的误差。在图6中,BCD三点即为低、中、高三点速度;而在AB、BC、CD、DE段根据需要设立微调点,如图4中A′、B′、C′、D′,可进一步调整速度曲线,向实际特性曲线逼近。校正时,系统需进入误差校正工作模式,通过在测速场进行顺-逆-顺航行试验,获得低、中、高三点计程仪对水测速的真速度,并将参数装订入系统,完成误差校正功能。
在动态性能试验中,对试验船只首尾方向速度进行三点校正,横向速度进行零位校正,然后对合速度进行考核,以判定系统精度是否满足要求。在空泡水筒试验中,分别对纵横向速度进行误差校正,并进行复测考核。
误差校正利用校正软件实现,通过显控单元人机界面操作,进入误差校正工作模式后,进行三点校正,分别对计程仪低、中、高三个速度进行顺-逆-顺航行试验,分别获得舰船的低、中、高计程仪速度和真速度,在人机界面中将速度值输入,即可对计程仪进行三点校正。有时为了缩短海上作业时间,在测速精度要求不是太高的情况下,也可以根据测速经验以及传感器的水筒试验数据,进行单点测速和两点测速校正。校正真速度的获取可以通过两种方式:一种是通过DGPS实时获得船舶航行绝对速度,并通过顺-逆-顺间接获得船舶航行对水真速度;另一种是通过在测速场通过顺-逆-顺的方式测量一定距离迭标通过时间的方法获得对水真速度。近年来,随着DGPS技术的发展,基本淘汰了测速场迭标获得对水真速度的方案。误差校正流程框图见图7。

图7 误差校正软件流程框图
测速流程开始后,校正软件实时测量由DGPS计算得出的平均真速度和计程仪测量的平均速度的误差,并记录各自测量的平均速度,误差ΔV计算[3]方法如下:

式中:VJP为电磁计程仪对水平均速度,kn,由顺-逆-顺三个航次平均计算所得;VZP为舰船对水平均真速度,kn,由顺-逆-顺三个航次平均计算所得。
3 试验验证
原理样机在某研究所进行空泡水筒试验,验证了双轴传感器纵横两个方向线性度以及误差校正软件是否合理。试验结果表明:双轴电磁计程仪系统工作正常,校正后精度能够满足要求,纵横速度校正数据见表1、表2。
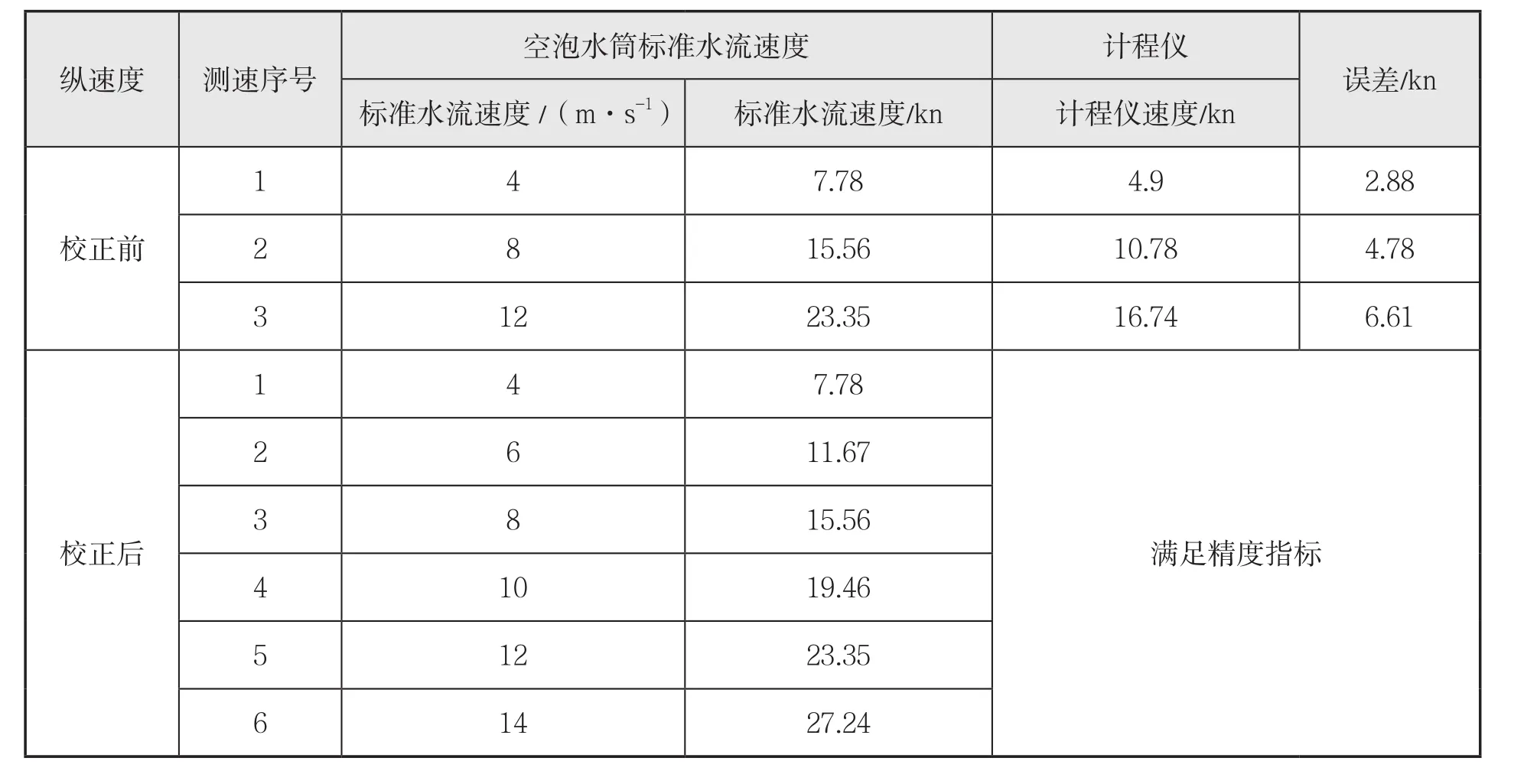
表1 空泡水筒试验纵速度校正数据

表2 空泡水筒试验横速度校正数据
之后又进行了千岛湖试验场湖上航行试验,主要验证在湖上航行状态下,经误差校正后的双轴电磁计程仪合速度精度能否满足要求。由于试验场舰船速度有限,仅进行低速段的速度校正和复测,试验结果良好。试验数据见表3。
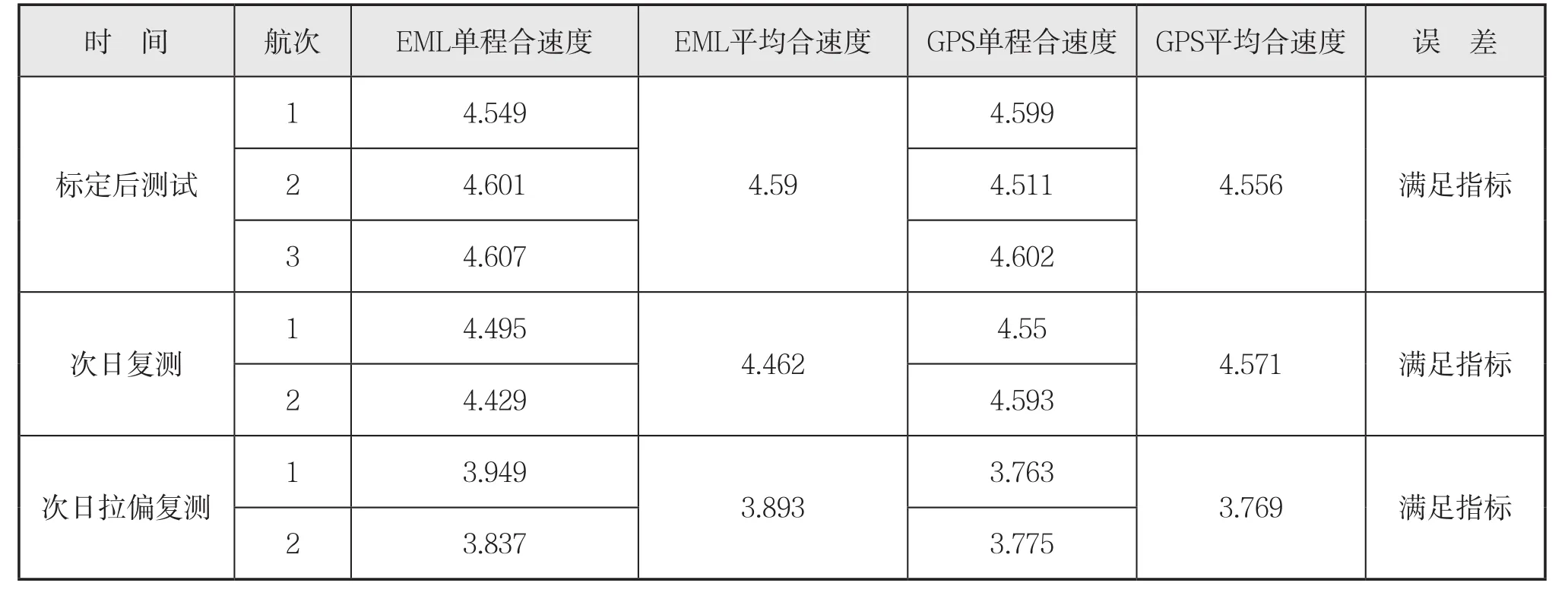
表3 千岛湖航行试验数据kn
4 结 论
经空泡水筒以及湖上试验验证,基于ARM的双轴电磁计程仪能较好实现速度测量、显示、通信和校正功能,并且速度校正算法正确,满足系统精度指标,达到预期目标。
电磁传感器及其配套电路和软件进行双轴设计,有效解决了传统电磁计程仪无法测量船舶横向速度的难点。系统采用低成本的ARM芯片,以集成电路进行控制,采用串口屏进行人机界面设计,既实现了系统数字化设计,也降低了设备成本,有利于产品推向市场。
下一步的主要工作是进行双轴电磁传感器的进一步低成本化设计以及工程化设计,从而提升产品竞争力。
[1] 张德会,金光耀. 基于PC104的电磁计程仪及其误差校正系统[J]. 船舶,2013 (3):73-76.
[2] 邹洪,向大威,许伟杰,等. 多普勒计程仪速度参照系统的误差分析[J].声学技术,2003(3):162-168.
[3] 赵仁余. 航海学[M]. 北京:人民交通出版社,2009.
[4] 舰船电磁计程仪传感器的微弱信号检测[J].光电技术应用,2013(2):59-61.
[5] 船用计程仪极间海水电阻的模拟计算及诊断应用[J].船舶工程,2013(4):75-77.
On biaxial electromagnetic log based on ARM
BI Yan ZHANG De-hui
(1.Underwater Acoustic Navigation System Army Representative Room in Shanghai,Shanghai 200136, China;2.CSSC Marine Technology Co.,Ltd., Acoustic Navigation Department, Shanghai 200136, China)
A velocity measuring system of the two-dimensional ship speed is designed by using the electromagnetic induction principle based on ARM controller, in order to improve the performance of the electromagnetic log. The ARM controller and its peripheral circuit are the core of the control and the speed calculation with special selfcheck module, signal amplifier module, low pass filter module, phase modulation module, phase demodulation module, data collection module, ARM data processing and control module, display control module, excitation module and power module. The error can be corrected by using the curve approximation method in the software,leading to the steady system with convenient operation.
phase demodulation ; double axis; signal amplify; phase modulation
U665.152
A
1001-9855(2017)06-0067-07
10.19423 / j.cnki.31-1561 / u.2017.06.067
2017-05-11;
2017-06-26
毕 彦(1976-),男,工程师。研究方向:水声导航技术。
张德会(1983-),男,硕士,工程师。研究方向:水声导航技术。
猜你喜欢
国学(2020年1期)2020-06-29 15:15:30
中国生物医学工程学报(2019年4期)2019-07-16 08:04:16
数学物理学报(2017年6期)2018-01-22 02:26:53
制造技术与机床(2017年8期)2017-11-27 02:10:12
凿岩机械气动工具(2017年3期)2017-11-22 07:21:29
摄影之友(影像视觉)(2017年1期)2017-07-18 11:12:16
中学生数理化(高中版.高二数学)(2017年1期)2017-04-16 05:33:46
照明工程学报(2016年3期)2016-06-01 12:18:01
焊接(2015年9期)2015-07-18 11:03:52
河南科技(2014年16期)2014-02-27 14:13:21