
单级作动筒冷气弹射装置动力学特性的数值计算
2017-12-23 02:08李海军
中北大学学报(自然科学版) 2017年5期
游 坤, 李海军
(海军航空工程学院 兵器科学与技术系, 山东 烟台 264001)
单级作动筒冷气弹射装置动力学特性的数值计算
游 坤, 李海军
(海军航空工程学院 兵器科学与技术系, 山东 烟台 264001)
设计了具有自动充气功能的单级作动筒式冷气弹射装置, 其作动筒采用气体回收方式, 主要用于弹射“小直径炸弹”SDB(Small Diameter Bomb). 为了验证弹射装置的工作性能, 建立了该弹射装置主要部件的数学模型, 运用MATLAB软件计算仿真, 分析了弹射装置的动力学特性. 仿真结果表明: SDB弹射速度可以满足设计要求, 并且当SDB质心与弹射装置两个作动筒非对称时, SDB会产生俯仰角, 俯仰角不能过大, 可以通过控制导气管调节阀开口通径来降低俯仰角.
冷气弹射装置; 气体回收; 内弹道; 小直径炸弹
0 引 言
冷气弹射装置是一种用高压气体作为动力源, 将机载航空武器或其它悬挂物弹射出去, 使其与载机快速分离的一种专用装置[1]. 冷气弹射装置动力源使用的是惰性气体, 例如氮气, 地面维护更方便快捷, 不需要对复杂的管路进行清洗, 但它对气瓶要求比较高, 结构没有热弹射装置那么紧凑[1-2]. 航空弹药弹射装置的作动筒活塞有不同的回收方式, 弹簧回收方式比较常见, 这种回收方式常用于二级或三级活塞回收, 回收速度快.
本文弹射装置具有自动充气功能, 使用的是气体回收式作动筒, 相比于弹簧回收, 气体回收方式通常用于单级活塞, 结构更加简单可靠. 本文对整个弹射装置进行数学建模, 分析弹射装置的内弹道特性, 研究弹射装置某些结构参数的改变对SDB最终脱离载机时的俯仰角和活塞的速度等动力学特性的影响.
1 弹射装置结构及原理
本文弹射装置是以某型热弹射装置为例进行建模计算. 弹射装置蓄能部分主要由空气增压机、 控制器、 传感器、 耐高压气瓶等部件组成. 根据传感器采集反馈的信息, 在控制器的调控下, 增压机自动压缩空气, 充入气瓶, 避免人工充气. 其它部件主要有开沟活塞、 导气管、 连杆机构、 弹射作动筒等, 其结构简图如图 1 所示.

图 1 弹射装置结构图Fig.1 Structure diagram of ejection device
弹射装置工作原理为在飞行员发出“投弹”信号后, 弹射装置控制器发出指令, 使电磁阀呈通路状态, 已经压缩好的高压空气快速进入低压室, 沿着管路进入开沟活塞腔室和作动筒活塞腔室. 开沟活塞推动连杆机构运动, 直至挂钩解锁完毕[3]. 活塞腔内的气体一部分通过排气杆进入活塞中部空腔, 再进入回收腔. 活塞在气体的推动下快速向下运动, 达到最大行程时, 电磁阀断路, 气瓶停止供气. 排气杆向下运动, 堵住空腔的气孔, 使回收腔呈密封状态, 同时排气杆内部排气孔伸出, 低压室内剩余气体排入作动筒活塞腔室, 活塞腔内气体再排入大气中, 当回收腔内的高压气体对活塞的推力大于活塞腔气体对活塞的推力时, 活塞开始回收至初始位置, 整个弹射过程结束.
2 数学模型
2.1 高压气瓶方程组
本文不考虑动力源蓄能机构的自动充气过程, 建模时假设高压气瓶内压强已经处于额定值. 在整个弹射过程中, 认为气瓶内高压空气是分布均匀的, 可以看成理想气体, 气瓶内气体不与外界进行热交换[4-5].
根据做功W=ρV, 可推出

根据质量m=ρV, 可推出
式中:k为绝热指数, 是理想气体可逆绝热过程的指数, 也称比热比, 即Cp/Cv;pg为高压气瓶内压强;R是气体常数;Eg是高压气瓶内单位质量空气具有的全部能量;Tc是气瓶壁温度;ag是空气与气瓶壁的热传系数;Sg和Wg是气瓶表面积和体积.
Gf为每秒钟从气瓶流入低压室空气质量, 存在倒流, 引用小孔节流公式如下[4]:
当pd≤βpg,

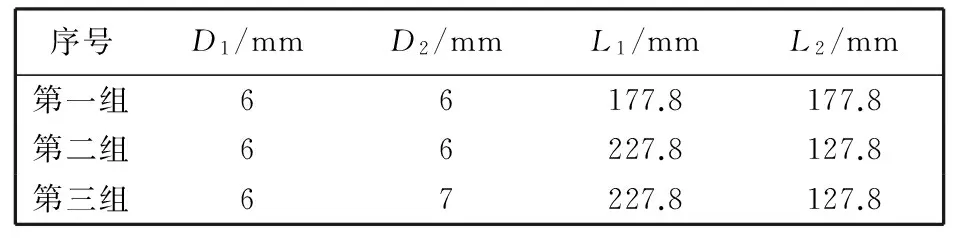
当βpd 当βpd 当pg≤βpd, 低压室的方程组是根据能量守恒定律推导的, 为了便于计算, 不考虑气体在管路传递过程中热传递而产生的损耗, 对于残留在管路中的气体, 可以用修正系数进行修正[5-7]. 电磁阀接通管路以后, 开钩活塞腔室压强迅速上升, 气体推动开钩活塞运动, 开钩活塞克服开钩阻力弹簧的阻力和摩擦力, 推动连杆机构运动, 将挂钩解锁, 释放负载. 低压室基本方程为 对于活塞回收阶段, 开钩活塞腔室体积变化很小, 不再考虑, 压强和密度方程为 式中:Wd是弹射装置低压室的初始容积;Ld是开钩活塞的瞬时位移;Sk是开钩小活塞截面积; 下标为L和r的参数分别指流向左、 右作动筒活塞的气体参数;Sd是弹射装置低压室内表面积;kg是阻力弹簧刚度系数;fg是开钩阻力弹簧预紧力和开钩活塞与管壁摩擦力之和;md和Dd分别是开钩活塞的质量和直径. 作动筒采用气体回收方式, 分三部分建模. 当活塞达到限位挡块时, 活塞暂时停止运动, SDB脱离载机, 电磁阀关闭, 此时, 活塞腔内的气体不再流入空腔, 直接流入大气, 回收时, 速度为负值, 以一个作动筒为例, 排气杆未伸出前, 弹射阶段取Gout为零, 排气杆伸出后, 回收阶段Gk为零. 活塞腔方程为 空腔方程组, 空腔处于回收腔和排气杆之间, 不考虑其散热, 方程组为 回收腔与活塞方程组为 式中:Wq是作动筒活塞腔初始容积; 下标q代表作动筒活塞腔的参数, 下标k代表活塞空腔中的各种参数, 下标h代表作动筒回收腔中参数;E和G分别代表单位气体总能量和气体单位时间流量;vq是作动筒活塞的速度, 分为两个阶段;L是活塞的瞬时位移;Fr是活塞与筒壁的摩擦力;m是活塞质量;S是活塞腔的截面积;Sh是作动筒回收腔的截面积. 对称挂弹时, 即弹射装置两个作动筒距航空弹药质心的距离相同[8]. 分别取SDB脱离载机前、 后两个阶段建模, 加速度和速度方程组如下: 根据牛顿第一定律F=ma可推导出 非对称挂弹时, 弹射装置左、 右作动筒距不同型号SDB质心的距离可能不相等, 或导气管调节阀通径大小不同, 或某些其它原因, 会导致SDB并不是平行于地面向下运动, 而是有一定的俯仰角. 仰头角度过大, 低头角度过大, 都会对载机安全造成一定的威胁, 所以要将俯仰角控制在一定范围内[9]. 根据理论力学中, 刚体绕定轴转动微分方程可以推出SDB转动微分方程为 式中: 下标q1,q2分别代表左、 右作动筒参数;vd和M是SDB的瞬时速度和质量;f是空气作用在SDB上的升力; Ф是SDB转动的角度;ω是SDB转动的角速度;J是SDB转动惯量. 由于此数学模型计算量非常大, 十分困难, 所以利用MATLAB软件中的微分方程解算指令, 使用4-5阶“龙格-库塔”算法, 其精确度比较高[10]. 编写MATLAB的仿真程序, 设置好各变量的初始值以及变化范围. 预设蓄能结束后气瓶压强为20 MPa, 气瓶体积为2 L, 弹射装置工作行程为140 mm, 负载质量110 kg, 环境温度300 K, 作动筒活塞的活塞直径33 mm, 活塞杆直径28 mm. 弹射活塞受力F=pS, 受力很大, 摩擦等因素带来的负功很小, 这些参数不再罗列, 得出仿真结果, 如图 2~图 6 所示. 图 2 开钩活塞和SDB的速度Fig.2 Speed of unlock piston and SDB 由图 2 可以看出, 在很短的时间内, 3 ms时, 开钩活塞腔室内压强迅速升高, 克服开钩阻力弹簧对开钩活塞的阻力和摩擦力, 推动开钩活塞快速运动, 速度峰值快速达到11.2 m/s, 开钩活塞再推动连杆机构进行解锁. 在开钩活塞达到最大行程后, 作动筒活塞开始运动, 推动SDB向下运动, 在55 ms时SDB离开弹射装置, 速度达到5.7 m/s, 满足离机速度大于4.9 m/s而小于9 m/s 的要求, 此后在重力作用下继续向下运动. 由于小直径炸弹质量轻, 大约110 kg左右, 在很短时间内速度达到5.7 m/s, 导致加速度很大, 由图3可以看出, 最大加速度已经达到94 m/s2, 过载很大的情况下, SDB内部某些精密仪器功能可能会受影响, 所以寻求降低过载的方法是十分重要的. 图 3 SDB加速度Fig.3 Acceleration of SDB 由图 4 和图 5 可以看出, 高压气瓶在弹射结束后关闭阀门, 停止供气, 不考虑气瓶的热交换, 所以内部压强稳定在13.6 MPa. 弹射装置低压室内压强峰值是14 MPa, 作动筒活塞腔室压强峰值是13.4 MPa, 在SDB和作动筒活塞分离后, 排气杆伸出, 低压室内高压空气快速流向作动筒活塞腔, 活塞腔内高压空气经过排气杆快速排入大气中, 压强快速降低. 图 4 高压气瓶和低压室的压强Fig.4 Pressure of high pressure gas cylinder and low pressure chamber 图 5 活塞腔和回收腔的压强Fig.5 Pressure of piston chamber and recovery chamber 由图 5 的回收腔压强曲线和图 6 的作动筒活塞的位移随时间变化曲线可以看出, 在75 ms时, 活塞腔内气体对活塞的推力小于回收腔气体对活塞的推力, 此时活塞开始回收, 回收腔内气体膨胀, 压强降低, 在95 ms时, 作动筒活塞回收到初始位置, 回收腔内压强在热交换作用下继续缓慢降低. 图 6 作动活塞位移Fig.6 Displacement of actuating piston 根据对非对称时对SDB的建模, 设计表 1 中三组数据进行对比分析, 变量是左、 右管路调节阀阀口通径和左、 右作动筒距离SDB质心的距离. 表 1 样本参数Tab.1 Sample parameter D1和D2分别为左、 右导气管调节阀开口通径,L1和L2分别为左、 右作动筒活塞距SDB质心距离, 第一组是初始参数. 对作动筒活塞的运动速度和SDB的俯仰角进行仿真, 得到的仿真结果如图 7 和图 8 所示. 图 7 作动活塞速度Fig.7 Speed of actuating piston 图 8 SDB俯仰角Fig.8 Pitching angle of SDB 由图 7 和图 8 可以看出, 第一组数据显示在完全对称的情况下, 俯仰角是0°. 取逆时针为正方向, 第二组数据显示, 当左、 右作动筒距弹药质心距离不相同时, SDB脱离载机瞬间俯仰角达到了0.12°. 第三组数据显示当左、 右管路调节阀阀口通径不同时, 左、 右作动筒活塞速度随时间变化的曲线图不一样, 右边活塞比左边活塞提前到达行程终点, 而且俯仰角降低为0.108°. 所以在由于挂弹不对称而产生俯仰角时, 可以通过控制左、 右管路调节阀阀口通径来将俯仰角控制在一定范围内. 1)对单级作动筒冷气弹射装置进行建模分析, 仿真结果表明其弹射速度以及加速度能够达到设计要求, 并且采用压缩空气作为动力源, 可降低维护成本和提高维护效率, 因此该弹射装置具有经济和军事运用价值. 2)当非对称挂弹时, 航空弹药运动会产生一定的俯仰角, 过大的俯仰角会影响载机安全, 可以通过管路调节阀控制左、 右管路气体流量来将俯仰角控制在一定范围内. 3)对此模型的建模分析, 可以为研究弹射装置各结构参数对SDB动力学特性的影响和为以后做实验提供理论依据. [1] 许斌, 杨积东, 刘广. 机载导弹弹射式发射建模与仿真[J]. 系统仿真学报, 2011, 23(1): 51-54. Xu Bin, Yang Jidong, Liu Guang. Modeling and simulation of ejection launcher for airborne missile[J]. Acta Simulata Systematica Sinaca, 2011, 23(1): 51-54. (in Chinese) [2] 甄建斌, 徐诚, 王涛. 新型集成式氮气弹射系统机构仿真优化设计[J]. 计算机仿真, 2013, 30(11): 54-57. Zhen Jianbin, Xu Cheng, Wang Tao. Institutions simulation and optimization design of new integrated nitrogen ejection system[J]. Computer Simulation, 2013, 30(11): 54-57. (in Chinese) [3] 曲晓燕. 航空军械装置[M]. 烟台: 海军航空工程学院, 2015. [4] 廖振强, 王涛, 余世海. 武器气体动力学数值计算方法[M]. 第1版. 北京: 国防工业出版社, 2005. [5] 甄建斌, 徐诚, 王涛. 基于电磁阀控制的氮气弹射系统动态仿真及性能分析[J]. 弹道学报, 2013, 25(4): 106-110. Zhen Jianbin, Xu Cheng, Wang Tao. Dynamic simulation and performance analysis of nitrogen ejection system controlled by solenoid valve[J]. Journal of Ballistics, 2013, 25(4): 765-239. (in Chinese) [6] 张涛, 王涛, 廖振强. 基于氮气驱动的悬挂发射装置数理建模分析[J]. 现代防御技术, 2012, 40(2): 159-162. Zhang Tao, Wang Tao, Liao Zhenqiang. Numerical modeling and dynamic analysis of nitrogen ejecting system for bomb hook[J]. Modern Defence Technology, 2012, 40(2): 159-162. (in Chinese) [7] 游专, 王涛, 廖振强. 大行程低过载抛放弹弹射系统建模与仿真[J]. 弹道学报, 2009, 21(2): 40-42. You Zhuan, Wang Tao, Liao Zhenqiang. Modeling and simulation for blank cartridge launching system with long stroke and lower overload[J]. Journal of Ballistics, 2009, 21(2): 40-42. (in Chinese) [8] 税朗泉, 郭姣姣. 某型三级作动筒气动弹射系统仿真研究[J]. 机械设计与制造, 2016,13(3): 10-13. Shui Langquan, Guo Jiaojiao. Simulation study of an ejection system with 3-section pneumatic actuator[J]. Machinery Design & Manufacture, 2016, 13(3): 10-13. (in Chinese) [9] 应申舜, 汤军社. 准平行机构实现机载导弹俯仰角的控制[J]. 弹箭与制导学报, 2005, 25(1): 120-122. Ying Shenshun, Tang Junshe. A new method to control the angle of missiles using the parallel linkage[J]. Journal of Projectiles; Rockets; Missiles and Guidance, 2005, 25(1): 120-122. (in Chinese) [10] 黄忠霖. 控制系统MATLAB计算及仿真[M]. 北京: 国防工业出版社, 2004. NumericalCalculationofDynamicsFeaturesofColdAirEjectionDevicewithSingleStageActuators YOU Kun, LI Hai-jun (Dept. of Armament Science and Technology, Naval Aeronautical University, Yantai 264001, China) A cold air ejection device with single stage actuators that can automatically be inflatable is designed, and the actuators adopt the gas recovery method,it is mainly used to eject small diameter bomb (SDB). In order to verify the performance of the ejection device, the mathematical model of the main parts of ejection device was established. MATLAB was used to calculate and simulate and analyze the dynamic characteristics of the ejection device. The results of simulation show that the ejection speed of SDB can meet the design requirement and When SDB centroid and the two actuators of ejection device are asymmetrical, SDB will produce pitching angle and it can not be too large,pitching angle can be reduced by controlling the opening size of the air tube regulating valve. cold air ejection device; gas recovery; interior ballistic; small diameter bomb (SDB) 1673-3193(2017)05-0568-06 2016-12-29 游 坤(1991-), 男, 硕士, 主要从事现代武器控制技术研究. 李海军(1966-), 男, 教授, 博士, 主要从事航空导弹测试与故障诊断研究. TJ765.239 A 10.3969/j.issn.1673-3193.2017.05.011

2.2 低压室方程组





2.3 作动筒方程组




2.4 SDB运动方程组


3 计算及仿真
3.1 挂弹对称状态





3.2 挂弹非对称状态


4 结 论
猜你喜欢
仪器仪表用户(2022年11期)2022-11-03仪器仪表用户(2022年10期)2022-09-29中国特种设备安全(2022年3期)2022-07-08仪器仪表用户(2022年4期)2022-04-01新疆钢铁(2021年1期)2021-10-14科学技术创新(2021年11期)2021-05-25弹箭与制导学报(2020年4期)2020-09-17劳动保护(2018年8期)2018-09-12航空发动机(2018年6期)2018-03-23科技视界(2017年16期)2017-11-11
