
履带自走式苜蓿切割压扁机设计与试验
2017-12-16 02:48赵建柱陈宏伟孙凤涛王德成
农机化研究 2017年4期
赵建柱,孙 佳,陈宏伟,孙凤涛,王德成
(中国农业大学 工学院,北京 100083)
履带自走式苜蓿切割压扁机设计与试验
赵建柱,孙 佳,陈宏伟,孙凤涛,王德成
(中国农业大学 工学院,北京 100083)
为适应西部地区苜蓿收获的需要,研制了一台履带自走式苜蓿切割压扁机。为此,进行了整机结构设计和总体布置,完成了零部件的选型、设计,并进行了样机试制。该机采用静液压无级变速驱动桥,实现了无级调速,操控简便。试验结果表明:样机爬坡度可达30%以上,最高作业速度可达10km/h,接地比压29kPa,能够较好地满足山地苜蓿切割压扁作业的需求。
苜蓿切割压扁机;履带;自走式;静液压无级变速
0 引言
近些年,国内外在平原地区已普遍使用大型拖拉机牵引幅宽较大的切割压扁机对苜蓿进行收获,效率高、效果好[1-2];而我国苜蓿主产区的甘肃、宁夏等西北地区,苜蓿多种植在山坡、丘陵地带,地形复杂多变,加上苜蓿种植区域中田鼠、野兔等中小型啮齿类动物巢穴较多,使用轮式机械收获较为困难[3-4]。目前,山区丘陵地带收割苜蓿主要采用手持式切割机或者小型割草机进行,虽然能够完成收获作业,但因为缺少压扁环节,不能保证苜蓿茎叶同速干燥。在收储运的过程中,苜蓿叶片脱落严重,致使蛋白质损失严重,减少了营养成分的含量,苜蓿草的品质不高;收获作业效率低,人力成本高,影响了产业的发展[5-6]。
鉴于此,本文研制了一台使用静液压无级变速驱动桥的履带自走式苜蓿切割压扁机,其结构简单、质量小,具有较好的通过性和爬坡能力、可实现无级变速等优点,可以较大幅度提高苜蓿收获效率,并能保证苜蓿干草料的品质[7]。
1 整机结构及工作原理
履带自走式苜蓿切割压扁机主要由切割压扁工作装置、发动机、静液压无级变速驱动桥、皮带传动装置、悬架系统、液压升降系统、油箱和车架等组成,如图1所示。切割压扁工作装置前置;静液压无级变速图驱动桥位于车架下侧前端两个驱动轮之间,前置驱动;发动机在车架后端纵置,动力直接从皮带轮传出。
履带自走式苜蓿切割压扁机作业时,行走部分与工作装置共用同一套动力装置,发动机通过皮带轮带动静液压无级变速驱动桥,为行走部分提供前进动力。作业时,发动机通过皮带轮带动切割器上的刀盘高速旋转,苜蓿被高速旋转的割刀切割后甩入调制器,并在上、下压扁辊的挤压下被压扁、抛出,在草茬上铺成具有一定宽度的草条。通过液压系统控制工作装置的升降可改变割茬高度,平行四连杆支架保证割刀角度不变。
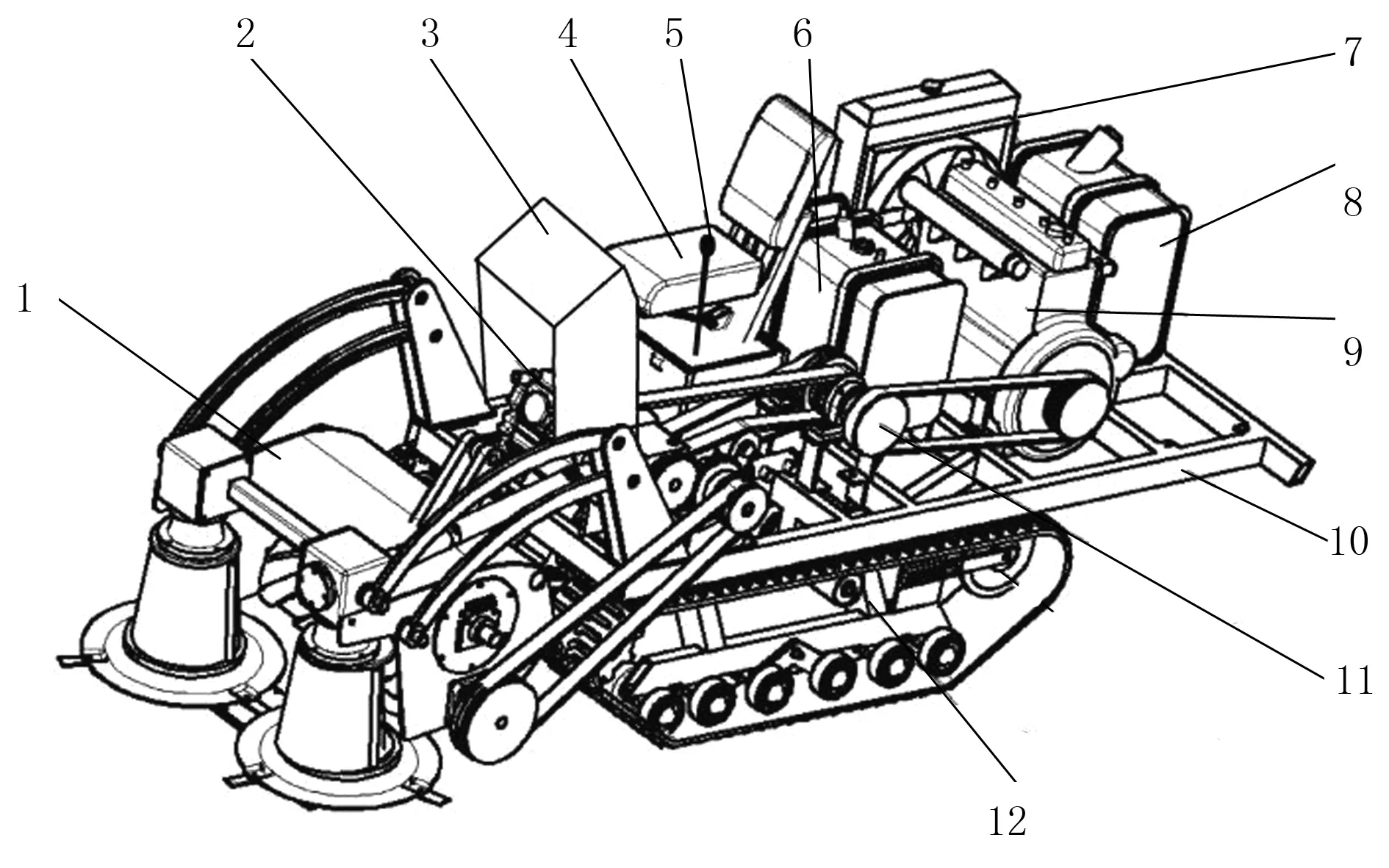
1.切割压扁工作装置 2.静液压无级变速驱动桥 3.仪表盘 4.座椅 5.操纵杆 6.燃油箱 7.散热器 8.液压油箱 9.发动机 10.车架 11.皮带轮及传动系统 12.悬架
2 主要技术参数及动力传动系统设计
2.1 参数确定
根据地形和种植状况确定切割压扁机割幅l为1.2m,要求生产率θ=0.4hm2/h,则各参数计算如下[8-10]:
切割压扁作业时,整机车速为
代入数据,最小工作车速为3.3km/h。
本切割压扁机采用旋转式割刀,刀盘边缘线速度vg约为65m/s,刀盘半径r为0.325m,则切割器转速为
压扁辊线速度约为整机前进速度的3.5~4倍,压辊直径d为0.225m,则压扁辊工作转速为
整机在工作过程中受到的行驶阻力分为内部行驶阻力和外部行驶阻力。其中,内部行驶阻力可换算成驱动轮上的摩擦阻力矩Mr,则
式中 Fk—切线牵引力;
rk—驱动轮的动力半径;
Mk—驱动转矩。
履带车辆行驶时的外部阻力Ff1为
式中 b—履带板宽度;
p—履带支承段单位面积上承受的压力;
z0—轨辙深度。
土壤单位面积上承受的压力(即履带接地比压)为
所以

式中 L0—履带接地长度;
Kc—土壤变形的内聚模量;
Kφ—土壤变形的内摩擦模量;
通常,n取0.3~0.4之间,Kc取5.77~11.42之间,Kφ取538.55~808.96之间[11]。代入数据,行驶阻力F1为4 575N。
履带式车辆在转向时的驱动功率大于正常行走时的驱动功率,一般是直线行驶功率的1.15~1.5倍,则行驶驱动功率最大消耗为
P1=1.15F1vmax/3600
取最高工作车速vmax为10km/h,计算得行驶驱动功率最大消耗P1为14.6kW。
根据旋转式割草机切割功率消耗曲线,可得切割器消耗总功率P2=2.16kW,压扁辊消耗总功率P3=2.58kW。升降机构不与行走驱动和工作装置同时工作,在此不考虑升降机构功率分配问题。
整机匹配总功率为
取整机的效率θ=0.85,计算得整机匹配总功率[Pe]max为27.3kW。
2.2 主要技术参数
根据我国西北部山区、丘陵苜蓿种植地带路面不平度、松软度、坡度、宽度等实际情况,以及苜蓿种植状态,结合苜蓿收获作业的要求,确定了履带的主要技术参数如表1所示。
在社会的科技发展中,一些新兴学科常从某些相关学科借用一些词汇并赋予新的意义内涵,而成为该学科的词汇。例如,石油专业中的bit“钻头”被机械加工行业借用表示“切削刀”。
表1 履带自走式苜蓿切割压扁机主要技术参数
Table 1 The main technical parameters of crawler self-propelled alfalfa cutting and flattening machine

参数项单位参数值主机外形尺寸mm2500×1300×1500整机质量kg1335整机匹配功率kW27.3工作车速km/h>0~3.3最高车速km/h10切割器转速r/min1937压扁辊转速r/min312最大爬坡度/爬坡角%≥60切割宽度mm1200接地比压kPa29
2.3 传动系统方案
本机采用三角带将发动机动力分别传递给行走部分和工作装置。
行走部分采用静液压无级变速驱动桥,通过驱动桥内的左右离合制动齿轮和左右驱动轴系上的传动齿轮带动左右驱动轮旋转、制动,实现切割压扁机前进、倒退、转向和制动。
切割压扁工作装置动力传递路线,分为以下3部分:升降作业,即工作台的升降;切割作业,即切割器旋转割草部分;压扁作业,即上下压扁辊旋转,如图2所示。切割压扁作业与举升不是同时动作,因此分为两套独立的传动路线。其中,工作装置举升部分通过液压系统控制;切割压扁部分的动力直接由发动机通过皮带轮传递,经过分动机构分两路输出给压扁辊旋转动力和割刀切割旋转动力。
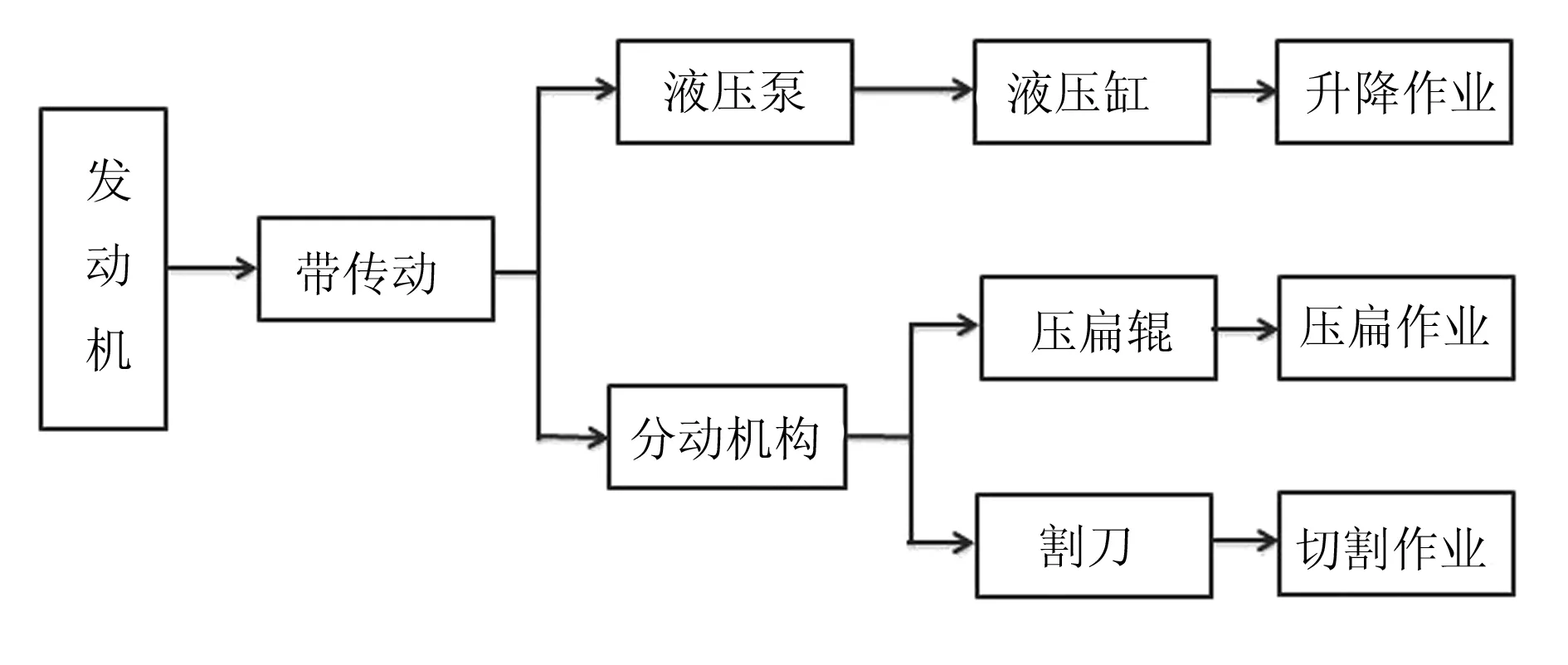
图2 工作装置传动路线示意图
2.4 行走驱动机构
由于作业环境复杂,外界负荷不断地波动,因此车辆需要适时地变更转速和转矩以保证良好的动力性和经济性。传统变速箱虽能通过换档达到一定的要求,但无法实现连续变化,而增加档位会使变速箱结构复杂,成本增加,操纵困难。本机采用静液压-机械驱动是一种将静液压无级变速器(HST)与机械式驱动桥组合串联的履带动力底盘驱动方式,如图3所示。这种驱动方式能够实现无级变速,且操纵简单,性能可靠,降低了整机成本。

图3 静液压无极变速驱动桥
静液压无级变速器是一个完整的闭式液压系统,可实现整机在一定范围内无级变速及负载换挡,主要由以下5部分组成:动力装置,主要为液压泵;执行元件,主要为液压缸或者马达;调节控制装置,主要为压力阀、流量阀和控制阀等;辅助装置,主要包括各种管接头、油管、油箱、过滤器及压力表等;还有工作介质。
机械驱动桥具有两个输出轴,动力由发动机通过HST输入,经由驱动桥内部中央传动及离合制动器输出给机械驱动桥输出端,驱动整机行驶。机械驱动桥两侧输出轴均配有离合制动器,可通过转动耳轴带动拨叉进行控制,实现行驶过程中驱动轮的差速、整机的转向和制动。
3 样机试验
3.1 行驶及工作性能试验
行驶及工作性能试验在裸露苜蓿种植试验田间进行,测试在不进行作业时的运输车速及在工作装置工作情况下的最高作业速度能否达到设计要求;测试启动、制动性能是否正常可靠;测试各项操作是否灵活可靠;测试工作装置工作状况。
试验结果表明:样机在运输(工作装置不工作)工况下最高车速可达10km/h,作业(工作装置工作)工况下最高车速可达3.3km/h,满足设计要求;样机启动、制动性能良好,操纵灵活,工作装置性能良好。

图4 速度试验现场
3.2 爬坡试验
爬坡试验在人工坡道进行,坡度30%。试验采用角度测量仪测量,试验结果显示样机爬坡度满足设计要求,可在30%的坡道上正常行驶。
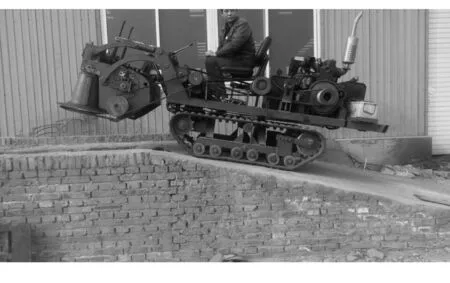
图5 爬坡试验现场
3.3 越障性能试验
越障碍性能试验在裸露苜蓿种植试验田间进行,越障性能试验现场设置长度约为0.8m、宽度为0.5m的地坑模拟动物巢穴。不同路面状况下样机能否正常行驶的试验结果显示:样机可顺利通过模拟巢穴,在多地洞路面行驶通过性良好,满足设计要求。

图6 越障性能试验现场
4 结论
1)整机布置合理、结构紧凑、重心稳定,满足山区苜蓿收获作业要求。
2)采用静液压无级变速驱动桥,实现了无级调速,操作简便,降低了劳动强度。
3)试验表明:样机有较好的越障碍通过性,爬坡度可达30%以上,最高作业速度可达10km/h,接地比压29 kPa。
[1] 滕绍民. 自走式青饲收割机不分行割台切割机理的研究
[D].北京:中国农业机械化研究院,2004.
[2] 杨世昆,苏正范.饲草生产机械与设备[M].北京:农业出版社,2009.
[3] 戚志强,玉永雄,胡跃高,等. 当前我国苜蓿产业发展的形势与任务[J].草业学报,2008(1):107-113.
[4] 罗亚兰,赵春花,卞鲁平,等. 山地牧草调制机关键设计参数确定与试验研究[J].干旱地区农业研究,2014(5):266-270.
[5] 卜繁超,安向旗. 苜蓿干燥特点及推广割草压扁机的必要性[J].农业机械,2002(9):35.
[6] 孙启忠,王宗礼,徐丽君.旱区苜蓿[M].北京:科学出版社,2014.
[7] 段天青,盛国成. 双圆盘旋转式割草机切割器的研究与设计[J]. 农业机械,2010(18):95-97.
[8] 陈志.农业机械设计手册[K].北京:中国农业科学技术出版社,2007.
[9] 周一鸣.拖拉机理论[M].西安:西安交通大学出版社,1993.
[10] 安尼洛维奇,瓦达拉岑柯. 拖拉机的设计和计算[M]. 孔德堋,周纪良,译.北京:中国农业机械出版社,1982.
[11] M G Bekker. Iintroduction to Terrain-Vehicle Systems(《地面—车辆系统导论》) [M]. 北京:机械工业出版社,1978.
Crawler Self-propelled Alfalfa Cutting and Flattening Machinary Design and Experimental Study
Zhao Jianzhu, Sun Jia, Chen Hongwei, Sun Fengtao, Wang Decheng
(College of Engineering, China Agricultural University, Beijing 100083, China)
In order to meet the requirements of alfalfa harvest of the western region,the paper developed a crawler self-propelled alfalfa cutting and flattening machinery.The whole structure design,general layout,parts selection and design,and prototype trial-production have been completed. Hydro static transmission has been used to achieve the variable speed and easy manipulation. The results showed that the maximum climbable gradient is 30%, the highest working speed is 10km/h,the ground specific pressure is 29 kPa. The prototype can meet the requirements of alfalfa working in mountainous region.
alfalfa cutting and flattening machinary; crawler;self-propelled;hydro static transmission
2016-03-18
公益性行业(农业)科研专项(201203024)
赵建柱( 1963- ),男,山东青岛人,副教授,硕士生导师,(E-mail)zhjzh@cau.edu.cn。
王德成(1965-),男,吉林吉林人,教授,博士生导师,(E-mail)wdc@cau.edu.cn。
S817.11
A
1003-188X(2017)04-0103-04
猜你喜欢
现代畜牧科技(2021年4期)2021-07-21
兵器装备工程学报(2021年3期)2021-04-09
阅读与作文(英语初中版)(2020年10期)2020-11-06
作文小学高年级(2019年1期)2019-02-18
钛工业进展(2018年4期)2018-11-22
汽车实用技术(2018年19期)2018-10-22
宇航学报(2017年5期)2017-06-15
中国三峡(2017年4期)2017-06-06
为了孩子(3~7岁)(2016年6期)2016-05-14
科技视界(2014年6期)2014-12-24
