
定子永磁型双凸极非稀土永磁电机谐波电流抑制*
2017-12-05 05:51潘绪前朱孝勇左月飞
电机与控制应用 2017年11期
潘绪前, 朱孝勇, 左月飞, 张 超, 全 力
(江苏大学 电气信息工程学院,江苏 镇江 212013)
定子永磁型双凸极非稀土永磁电机谐波电流抑制*
潘绪前, 朱孝勇, 左月飞, 张 超, 全 力
(江苏大学 电气信息工程学院,江苏 镇江 212013)
定子永磁型双凸极非稀土永磁电机(NRE-DSPM)采用剩磁较高的铝镍钴(AlNiCo)永磁代替传统的稀土永磁,降低电机制作成本的同时也可配合磁化绕组对电机气隙磁场进行调节,使电机获得较好的性能。但受电机本体参数影响,NRE-DSPM在运行时相电流中含有大量的谐波,严重影响电机的效率和稳定性。为解决此问题,采用了一种PI控制器并联谐振调节器的电流环控制方法。该方法结构简单,易于实现,且无需增加硬件成本,可对电流谐波进行有效抑制。一台1.25 kW的NRE-DSPM样机在试验平台上进行了试验,试验结果验证了所用方法的有效性。
非稀土类电机;定子永磁型双凸极电机;谐振调节器;谐波电流抑制
0 引 言
稀土永磁电机因其结构简单、转矩密度高、性能好等优点而被广泛应用于工业传动领域。但随着稀土价格的上升,稀土永磁电机的成本也变得十分昂贵,因此越来越多的学者把目光聚集在非稀土类电机上。非稀土类电机使用非稀土永磁代替传统的稀土永磁来进行励磁,虽然降低了电机的制作成本,但其性能远弱于稀土永磁电机。为解决此问题,学者们通常采用转矩密度较大的电机结构来提高非稀土类电机的电磁转矩。
定子永磁型双凸极电机是一种较为新颖的结构,将定子永磁型电机结构简单的特点与双凸极电机转矩密度较大的优点充分结合起来,使电机具有较大的转矩输出能力[1]。本文所研究的定子永磁型双凸极非稀土永磁电机(Doubly Salient Permanent Magnet Motor with Non-Rare-Earth,NRE-DSPM)就是以定子永磁型双凸极结构为基础,在转子上使用AlNiCo永磁材料代替传统的稀土永磁材料,使电机获得较好的转矩性能。同时由于AlNiCo剩磁很高,短时间内磁性不会发生变化,因此配合磁化绕组还可对NRE-DSPM进行在线或者离线充磁,增强电机反电动势,提高电机性能。但在NRE-DSPM实际运行中,受电机本体参数及控制系统的影响,电流中出现了大量的谐波,长时间运行会引起电机发热,大大影响电机运行时的效率和安全性。产生谐波电流的主要原因有:
(1) 电机反电动势中含有较多的谐波反电动势,并最终影响相电流。
(2) 逆变器非线性也会引起相电流中5、7次谐波增大[2]。
(3) 在进行各种优化的情况下,NRE-DSPM正负半周的磁路仍呈现出不对称的状况,引起交直轴电感波动较大,最终导致NRE-DSPM相电流中出现了大量偶次谐波。
抑制谐波电流可从电机本体或驱动两个方向实现。电机本体方面主要是通过优化电机本体相关的结构参数[3-4],改善气隙磁场正弦度为主。受电机结构和生产加工成本等因素的影响,此类方法存在一定的局限性。因此,大多数研究都集中在如何从控制方法上实现电流谐波的抑制。
为抑制由逆变器非线性引起的谐波电流,文献[5]从优化PWM波入手,利用SVPWM算法的调制特点,通过计算重新组合开关状态实现对特定谐波的消去,并取得了理想的效果,但其算法无法消除反电动势谐波带来的影响。为实现对各种因素所引起的谐波电流的抑制,文献[6]利用谐波注入的原理,来抵消dq轴中的特定频率波动,可减小谐波电流的含量,但此算法需要增加多个PI调节器及低通滤波器,很难取得理想的效果。文献[7]采用重复控制对dq轴上的6、12次谐波进行抑制,但重复控制算法比较复杂,需要较大的存储空间,当频率变化时,控制器的参数要重新计算,实现起来比较困难。
由于谐振调节器结构简单,易于实现,对交流信号的调节能力较强,因此近年来也被应用到PMSM电机调速系统中,对谐波电流进行抑制,并取得了很好的效果[8-10]。故本文在电流环采用了谐振调节器与PI控制器并联的控制结构,形成比例积分谐振器(Proportional Integral Resonator,PIR),对dq轴的特定次正弦扰动进行抑制,并在一台NRE-DSPM样机上验证了此算法的有效性。
1 NRE-DSPM介绍
1.1电机结构
本文研究的12/8型NRE-DSPM结构图如图1所示。为验证电机的实际性能,搭建了基于dSPACE系统的1.25 kW NRE-DSPM试验平台,如图2所示。

图1 NRE-DSPM结构图

图2 NRE-DSPM试验平台
该电机继承了传统的双凸极永磁电机结构的优点,转子上不放置任何绕组和永磁体,简单可靠。由于增加了磁化绕组,因此将定子设计为两层,外层定子为传统的凸极式结构并绕有集中式电枢绕组,内层定子嵌有4块径向充磁的AlNiCo永磁并绕有磁化绕组。此外,在双层定子结构中,因为永磁体和电枢绕组分别置于内外两层,可以大大减小电枢反应对AlNiCo永磁体工作点的影响[11]。
由于AlNiCo永磁材料的剩磁较高,在短暂时间内磁性不会改变,因此在AlNiCo永磁体上增加一套磁化绕组并设计独立的励磁电路对其进行充去磁。通过单独对绕组磁化电流的控制,不仅可以在离线的情况下增强NRE-DSPM的气隙磁场,也可以在线对电机磁场进行调节,使电机能够适应大功率运行。
1.2NRE-DSPM反电动势特性
由于NRE-DSPM具有磁通在线可调的特点,故其磁链方程也跟传统永磁同步电机(Permanent Magnet Synchronous Motor,PMSM)的磁链方程有所区别,设电机满磁化状态下的磁链为ψpm_max,可得到NRE-DSPM在任意磁化状态下的磁链表达式:
则NRE-DSPM反电动势的表达式为
式中:k——磁场调节系数(0≤k≤1),是关于变量iplus的函数;
iplus——磁化绕组中的电流脉冲;
Epm_max——满磁化状态下的反电动势幅值。
根据式(2)可以看出,与传统的PMSM相比,NRE-DSPM反电动势方程中增加了特有的磁场调节系数k。
为研究电机反电势特性,在150 r/min转速下测试了不同磁化状态下的NRE-DSPM电机反电动势,如图3所示。
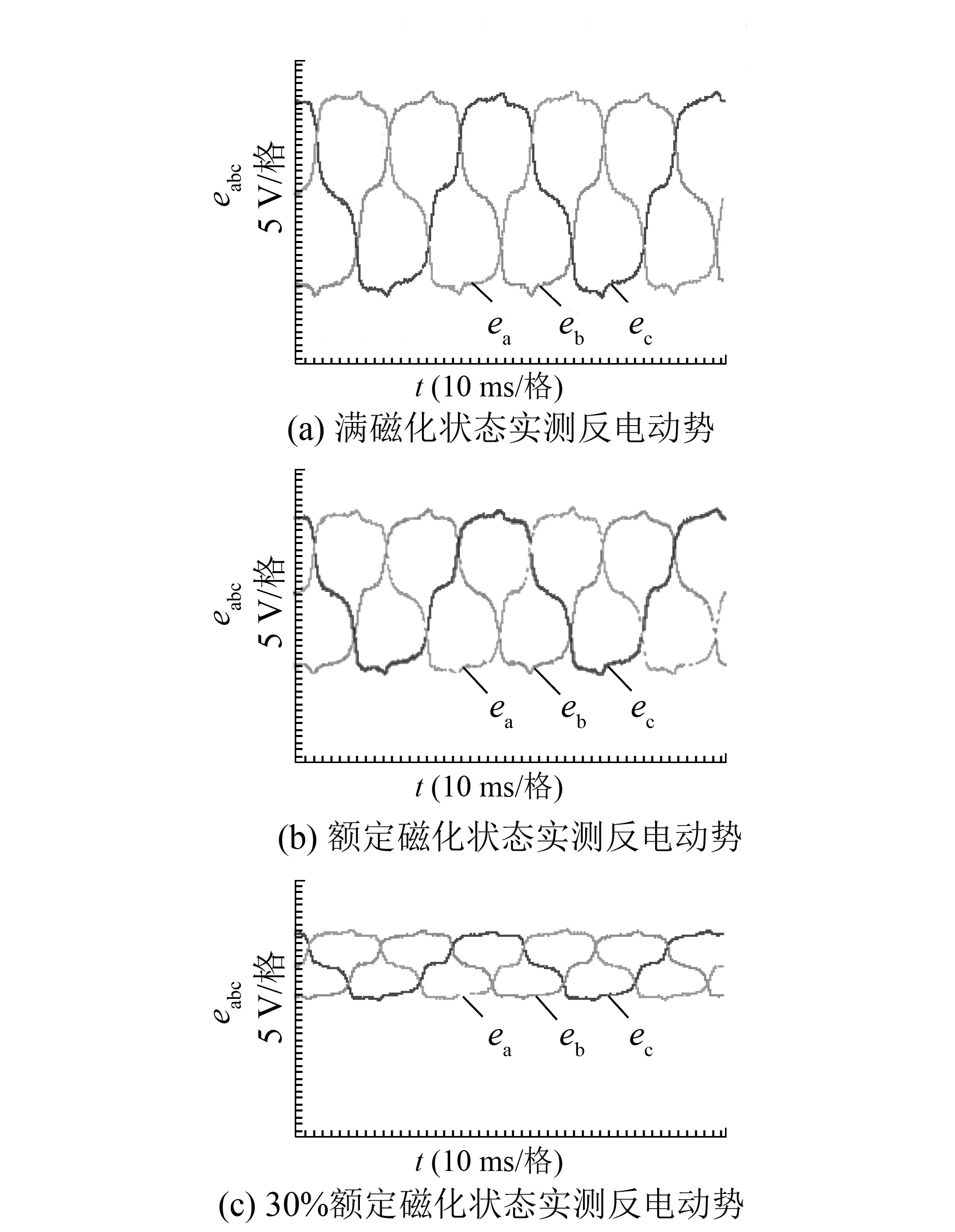
图3 不同磁化状态下实测反电动势
由实测反电动势可看出,由于AlNiCo永磁材料有多重磁化状态,导致NRE-DSPM不同的反电动势,体现了电机的灵活性。但不论何种磁化状态,电机反电动势畸变均比较严重。对三种状态下的反电动势进行FFT对比分析,结果如图4所示。由图4可看出,各种磁化状态下的反电动势THD基本相同,说明通过控制磁化电流只会改变气隙磁场的强度,而不会改变反电动势谐波的比例,故只需选择一种磁化状态进行分析即可。

图4 不同磁化状态反电动势FFT对比
1.3电感特性
NRE-DSPM受转子结构和永磁体排列方式等因素的影响,磁路出现了不对称,导致每相自感在一个电流周期内不再是正负半周对称,并引起交直轴电感波动。NRE-DSPM电感波形如图5所示,一个电流周期为37.5 ms,取两个周期的数据。由图5可明显看出,一个电流周期内,正负半周的电感不再对称,交直轴电感的波动主要以3倍频为主。电感是电机的重要参数,当交直轴电感波动较大时,必然会影响电机运行。

图5 NRE-DSPM电感波形
2 NRE-DSPM电流谐波分析
2.1NRE-DSPM数学模型
由传统PMSM数学模型,可将NRE-DSPM在dq轴坐标系下的数学模型改写成:
式中:ud、uq、Ld、Lq、id、iq——dq轴上的等效电压、等效电感和等效电流;
R——定子电阻,在dq轴的等效值相同;
ωe——电机角速度;
ψpmf——旋转坐标系下NRE-DSPM的永磁体磁链,则ωeψpmf为NRE-DSPM在旋转坐标系下的反电动势,理想状态下为直流量。
根据式(1)和式(2),可将式(3)改写为
式中:Epmf_max——NRE-DSPM电机满磁化状态下的反电动势。
当NRE-DSPM反电动势畸变较大和电感不对称时会导致Ld、Lq、Epmf_max产生波动,则最终引起dq轴电压、电流波动。式(4)也说明了反电动势畸变和磁路不对称是NRE-DSPM产生谐波电流的主要原因。
鉴于空间电压矢量控制方法具有结构简单、直流电压利用率高、电流谐波小等优点,本文依旧采用空间电压矢量控制策略对NRE-DSPM的性能进行分析。基于空间矢量脉宽调制(Space Vector Pulse Width Modulation,SVPWM)的NRE-DSPM控制系统框图如图6所示。其中,转速环PI设计采用文献[12]中的复合PI控制器设计方法。电流环PI采用反电动势补偿PI控制器,参数设计采用零极点对消的方式来选取。
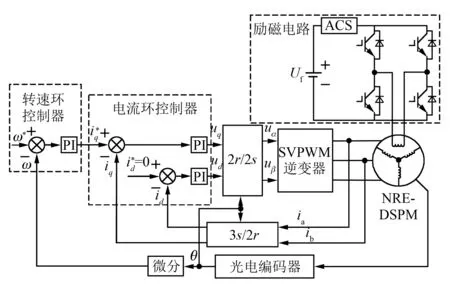
图6 基于SVPWM的NRE-DSPM控制系统
2.2开环电流分析
为说明电机气隙磁场和电感等参数对电机相电流的影响,给NRE-DSPM通入幅值为12 V、频率为20 Hz、相位相差120°的理想三相正弦电压,即电流开环试验,得到此时的A相空载电流及dq轴电流,如图7(a)所示。由图7(a)可以看出,在理想正弦电压作用下NRE-DSPM产生的相电流畸变比较大,受磁路不对称的影响,相电流也出现了上下不对称的情况。根据傅里叶分解原理可知,当电流正负半周不对称时,就会出现偶次谐波。对图7(a)所示的相电流进行FFT分析,结果如图7(b)所示。

图7 开环实测电流
对于三相负载来说,偶次谐波电流的危害远大于奇次谐波电流,不仅会给电机带来更多的损耗,还会导致电机温升过快,严重威胁电机的安全和寿命。图7说明,NRE-DSPM参数不理想时会给相电流带来大量的谐波。
2.3dq轴电流谐波分析
在传统的电机调速系统中,由各种因素造成的相电流谐波在3s/2r作用下最终变为dq轴电流的波动。由于本文所研究电机的相电流中含有非常规的偶次谐波电流,故为方便分析,重新推导了dq轴电流的表达式。由图7分析结果可知,NRE-DSPM相电流中以2、4、5、7次谐波为主,忽略其他次谐波影响,定子相电流可写成如下形式:
式中:ω——电流基波角频率;
φ——各次谐波电流的初始相位,在NRE-DSPM控制系统中ω与ωe是同一概念。
将式(5)表示的三相电流由静止坐标系等幅值变换到旋转坐标系,可得dq轴电流的表达式:
式中:id1、iq1——基波电流在基次同步旋转坐标系下的d轴和q轴分量。
由式(6)可看出,dq轴电流中主要谐波是3、6次谐波电流,其中,相电流中的2、4谐波电流共同作用生成了dq轴3次谐波电流,相电流中的5、7次谐波共同作用生成了dq轴6次谐波电流。
2.4闭环电流分析
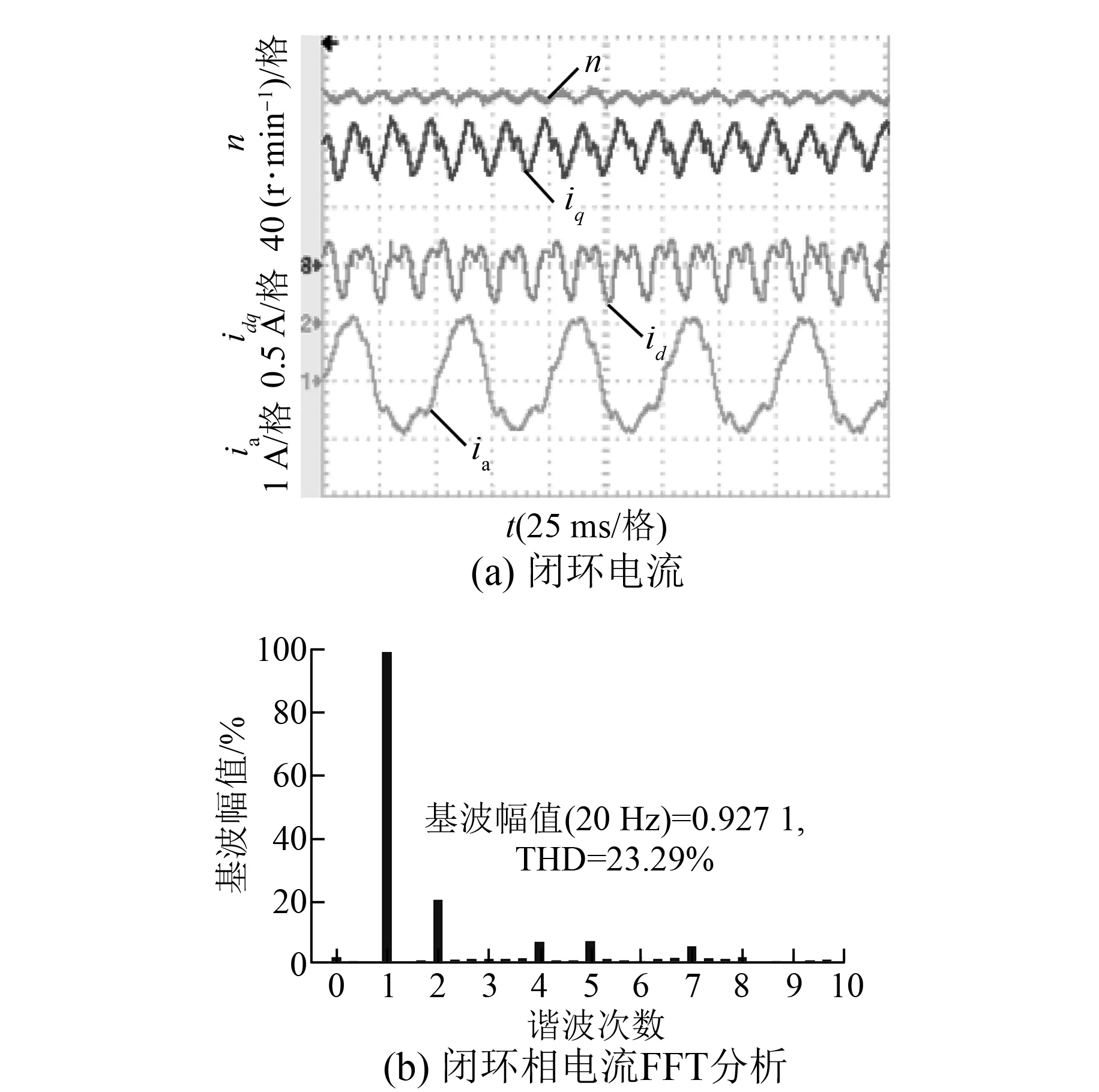
图8 闭环实测电流
对电流进行闭环控制,加入PI控制器,给定iq=1 A,id=0 A,角频率为20 Hz,得到实测闭环电流,如图8(a)所示,其FFT分析结果如图8(b)所示。
结合图8和图7的试验和分析结果可以看出,通过电流环PI控制器能够在一定程度上减小dq轴电流的扰动和相电流的畸变程度,但效果并不是很好。这也说明了PI控制器对交流量的调节能力有限[13],虽然调大PI控制器的参数可以取得更好的效果,但同时会增大系统的噪声。因此,为更好地实现电机稳定高效运行,本文结合了结构比较简单的谐振调节器来对谐波电流进行抑制。
3 谐波电流抑制方法
3.1谐振调节器
谐振调节器由内模控制推导而来[14]。内模控制可根据外部扰动的性质在控制器中加入相应的扰动信号模型,便可抵消外部扰动信号的作用。加入正弦信号模型的内模控制器就是谐振调节器,理想谐振控制器的模型为:
式中: 2kωr——谐振系数;
ωr——谐振频率。
由式(7)可知,谐振调节器在谐振频率点处的增益无穷大,能够实现对特定频率正弦信号的无静差跟踪,而当正弦信号作为外部扰动时,也可对其进行抑制。谐振调节器广泛用于有源滤波器及PWM整流器和逆变器中[15-16],能够有效抑制交流侧的谐波电流和电压。在电机控制系统中,dq轴电流扰动的频率与转速基波频率为整数倍关系,故dq轴电流谐波次数可由角频率ωe来计算。根据这个特点,谐振调节器也完全适用于PMSM的控制系统,谐振频率ωr与电机角频率ωe有关[17]。
3.2电流环PIR控制器
由于矢量控制是在同步旋转坐标系下对dq轴电流进行控制,在抑制dq轴电流扰动的同时还需兼顾直流量的调节。故谐振调节器用在PMSM控制系统中时一般采用PI并联谐振调节器的控制结构,形成比例-积分-谐振环节,简称比例积分谐振器(PIR),由比例-积分环节实现直流量的无静差跟踪,由谐振环节抑制特定频率的电流扰动,便可实现对直流量和交流量的共同调节。
为较好地抑制dq轴电流的波动,本文采用了文献[18]所用的PIR控制器结构,以q轴为例,基于PIR的NRE-DSPM电流谐波抑制结构框图如图9所示。其中D(ωt)是dq轴扰动。由NRE-DSPM的实际dq轴扰动电流主要是3、6次谐波,故在电流环上采用3次和6次PIR控制器。
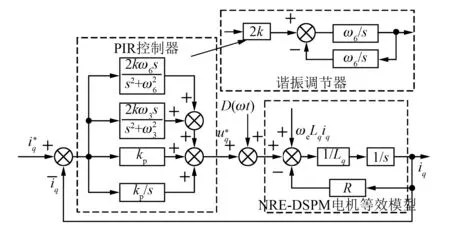
图9 基于PIR的电流谐波抑制结构框图
4 试验验证
为验证PIR控制器的有效性,本文在NRE-DSPM试验平台上进行了算法验证试验。
使NRE-DSPM运行在完全磁化状态,设置转速为恒定150 r/min,由磁粉制动器施加1.5 N·m负载,电流环采用PI控制器,得到稳态时的相电流如图10(a)所示。然后将图9所示的PIR控制器加到电流环,稳态时的相电流如图10(b)所示,并将试验结果作FFT对比分析,如图11所示。
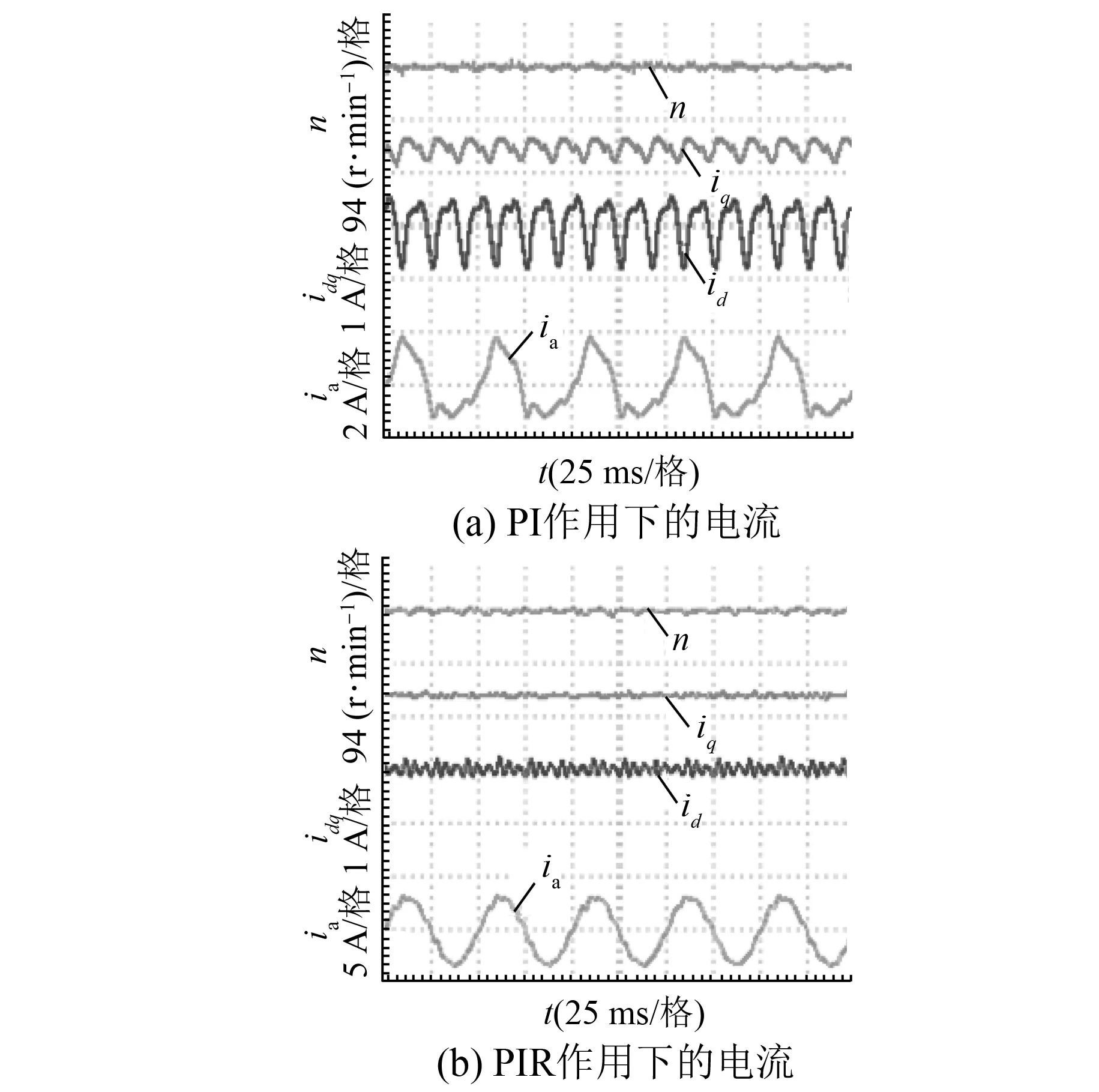
图10 不同控制器作用下的电流
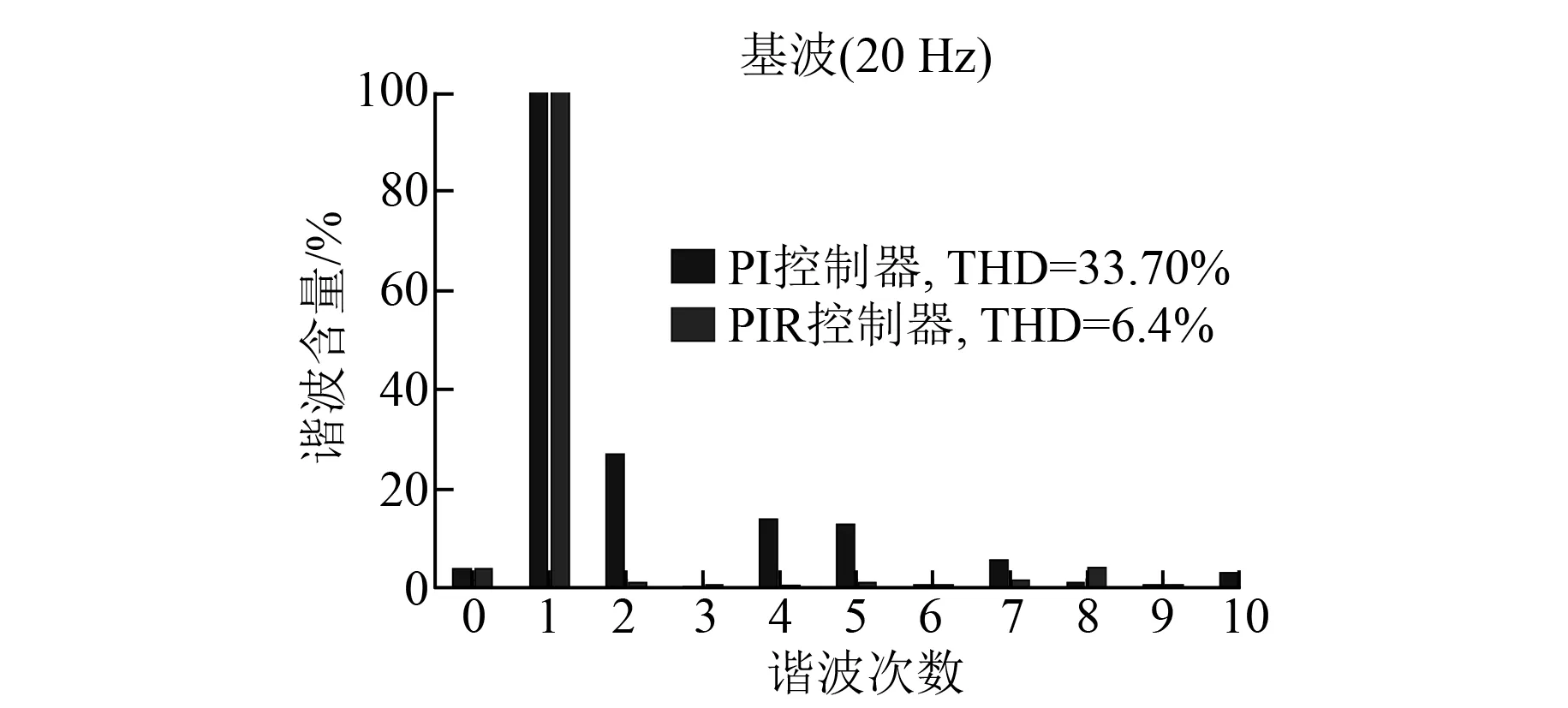
图11 不同控制器作用下的相电流FFT对比
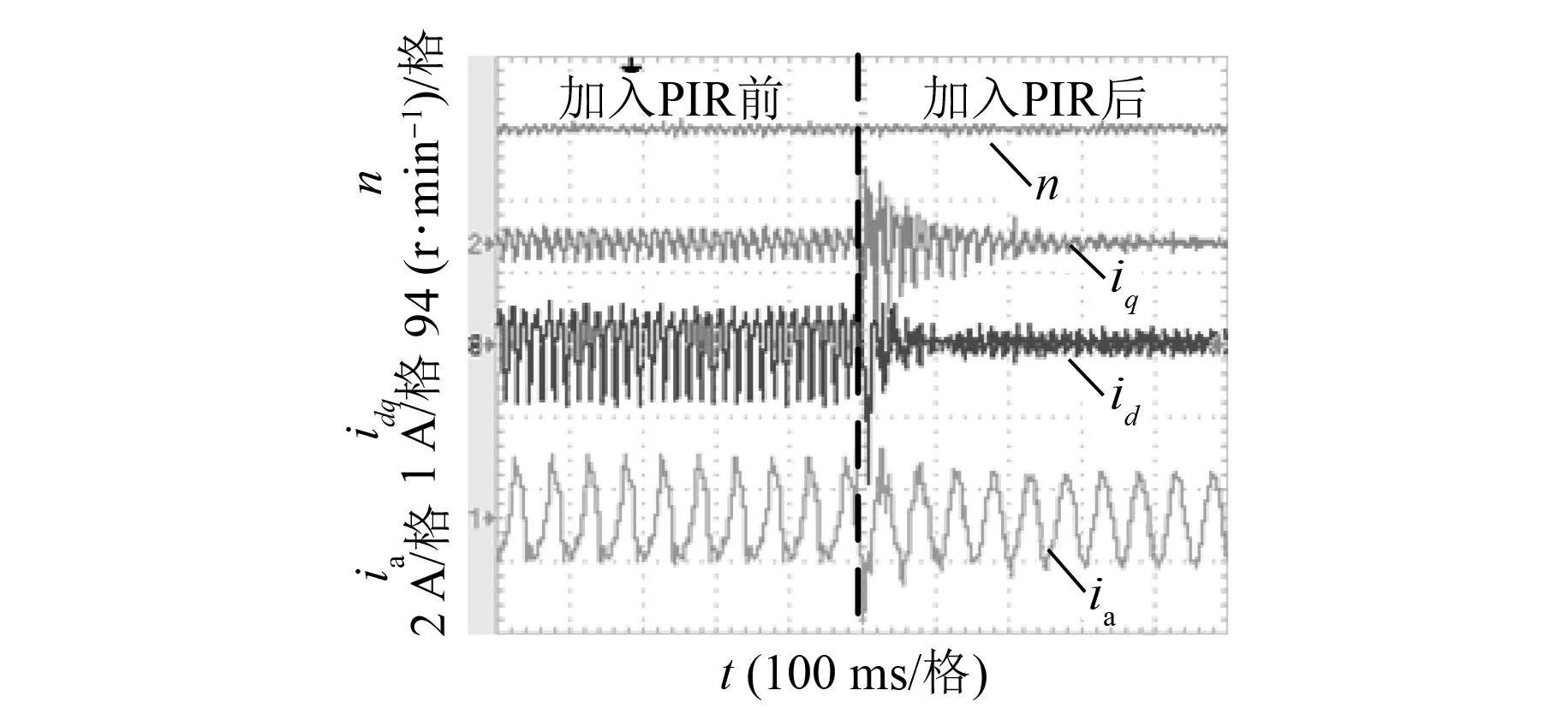
图12 加入PIR瞬间电流
结合图10和图11可知,在PIR控制器的作用下,dq轴中3、6次电流扰动基本被抑制,相电流THD大大降低,电流基本为正弦。由于此时电机的效率提高,故在相同的试验条件下,相电流幅值相应有所降低,充分验证了PIR算法的有效性。图12是PIR算法切换前后的电流波形。由图12可以看出,从PI控制器切换到PIR控制器需要约0.5 s。这也说明PIR控制器在实际应用时也具有良好的动态特性,适用于电机控制系统。
5 结 语
NRE-DSPM具有带载能力强、转矩密度高及磁场在线可调等优点,但实际运行时相电流中出现的2、4、5、7次谐波电流严重影响了电机的效率。因此,本文在分析了谐波电流成因的基础上,采用由PI控制器并联谐振调节器组成的PIR控制器作为电流环控制器,实现了对各种因素所引起的谐波电流的抑制。最后在基于dSPACE控制系统的NRE-DSPM样机试验平台上对PIR控制器进行了验证,并取得了满意的效果。试验结果表明:PIR控制器能有效地抑制各次谐波电流,实现电机稳定高效运行。
[1] 赵纪龙,林明耀,付兴贺,等.混合励磁同步电机及其控制技术综述和新进展[J].中国电机工程学报,2014,34(33): 5876-5887.
[2] 吴茂刚,赵荣祥,汤新舟.正弦和空间矢量PWM逆变器死区效应分析与补偿[J].中国电机工程学报,2006,26(12): 101-105.
[3] HAN S H, THOMAS M J, ZHU Z Q. Analysis of rotor core eddycurrent losses in interior permanent magnet synchronous machines[J].IEEE Transactions on Industry Applications,2010,46(1): 196-205.
[4] 王秀和,杨玉波,丁婷婷,等.基于极弧系数选择的实心转子永磁同步电动机齿槽转矩削弱方法研究[J].中国电机工程学报,2005,25(15): 146-149.
[5] 廖勇,甄帅,刘刃,等.用谐波注入抑制永磁同步电机转矩脉动[J].中国电机工程学报,2011,31(21): 119-127.
[6] 周熙炜,刘卫国.空间电压矢量合成的新型选择谐波消去技术[J].中国电机工程学报,2009,29(30): 35-41.
[7] KIM J S, DOKI S, ISHIDA M. Suppression of harmonic current in vector control for IPMSM by utilizing repetitive control[C]∥ Processing of IEEE Conference on Industrial Technology, Bangkok,Thailand:IEEE,2002: 264-267.
[8] YEPES A G, FREIJEDO F D, FERNANDEZ C P. Torque ripple minimization in surface-mounted PM drives by means of PI+multi-resonant controller in synchronous reference frame[C]∥ 36th Annual Conference on IEEE Industrial Electronics Society, Glendale, USA,2010: 1017-1022.
[9] 李毅拓,陆海峰,瞿文龙,等.基于谐振调节器的永磁同步电机电流谐波抑制方法[J].中国电机工程学报,2014,34(3): 423-430.
[10] 王恩德,黄声华.表贴式永磁同步电机伺服系统电流环设计[J].中国电机工程学报,2012,32(25): 82-88.
[11] 朱孝勇,程明.定子永磁型混合励磁双凸极电机设计、分析与控制[J].中国科学:技术科学,2010(9): 1061-1073.
[12] 左月飞,刘闯,张捷,等.永磁同步电动机转速伺服系统PI控制器的一种新设计方法[J].电工技术学报,2016,31(13): 180-188.
[13] HU J B, HE Y K, XU L, et al. Improved control of DFIG systems during network unbalance using PI-R current regulators[J].IEEE Transactions on Industrial Electronics,2009,56(2): 439-451.
[14] FUKUDA S, YODA T. A novel current-tracking method for active filters based on a sinusoidal internal model[J].IEEE Trans on Industry Applications,2001,37(3): 888-895.
[15] ZMOOD N D, HOLMES G D. Stationary frame current regulation of PWM inverters with zero steady-state error[J].IEEE Trans on Power Electronics,2003,18(3): 814-822.
[16] 周娟,张勇,耿乙文,等.四桥臂有源滤波器在静止坐标系下的改进PR控制[J].中国电机工程学报,2012,32(6): 113-120.
[17] ESCOBAR G, HERNANDEZ B G P, MARTINEZ R P.A repetitive-based controller for the compensation of 6l±1 harmonic components[J].IEEE Internatiional Symposium on Industrial Electronics,2008,55(8): 3150-3158.
[18] 王贺超,夏长亮,阎彦,等.基于谐振控制的表贴式永磁同步电机弱磁区电流谐波抑制[J].电工技术学报,2014,29(9): 83-91.
2017 -03 -13
引领技术发展趋势 报道经典实用案例 反映行业最新动态
TheCurrentSuppressionofDoublySalientPermanentMagnetMotorwithNon-Rare-Earth*
PANXuqian,ZHUXiaoyong,ZUOYuefei,ZHANGChao,QUANLi
(School of Electrical and Information Engineering, Jiangsu University, Zhenjiang 212013, China)
AlNiCo permanent magnet was used in doubly salient permanent magnet motor with non-rare-earth (NRE-DSPM) to replace traditional rare earth permanent magnet, which could reduce the production cost of the motor, and the air-gap magnetic field of NRE-DSPM could be adjusted by the magnetizing windings to improve the performance of the motor. However, due to the influence of the motor parameters, a large number of harmonics existed in the phase current of NRE-DSPM motor, which seriously affected the efficiency and stability of the motor. To solve this problem, a current loop control method based on PI controller parallel resonant regulator was adopted. The method was simple and easy to implement, and does not need to increase the hardware circuit cost, could effectively suppress the current harmonics. Experiments were finished on a 1.25 kW NRE-DSPM experimental platform, and the effectiveness of the method was verified by the experimental results.
non-rare-earthmotor;doublysalientpermanentmagnetmotor;resonantregulator;harmoniccurrentsuppression
国家自然科学基金项目(51477069);国家自然基金项目(51377073)
潘绪前(1991—),男,硕士研究生,研究方向为非稀土永磁电机及其驱动系统。朱孝勇(1975—),男,博士生导师,教授,研究方向为永磁电机设计、分析与驱动控制等。
TM
A
1673-6540(2017)11- 0072- 07
猜你喜欢
新型工业化(2021年8期)2021-10-23
电子与封装(2021年7期)2021-07-29
郑州大学学报(工学版)(2020年2期)2020-06-16
汽车电器(2019年2期)2019-03-22
新农业(2018年3期)2018-07-08
新农业(2018年3期)2018-07-08
电源技术(2016年9期)2016-02-27
新疆大学学报(自然科学版)(中英文)(2014年2期)2014-11-06
电测与仪表(2014年21期)2014-04-04
微特电机(2012年10期)2012-10-31
