基于LabVIEW Robotics移动式探测车避障功能设计
2017-11-27 05:59:59王忠强谢丽蓉王晋瑞
实验技术与管理 2017年11期
王忠强, 谢丽蓉, 王晋瑞, 高 磊
(新疆大学 电气工程学院, 新疆 乌鲁木齐 830047)
基于LabVIEW Robotics移动式探测车避障功能设计
王忠强, 谢丽蓉, 王晋瑞, 高 磊
(新疆大学 电气工程学院, 新疆 乌鲁木齐 830047)
以LabVIEW Robotics Starter Kit 2.0硬件平台为基础,结合LabVIEW辅助工具包,设计了具有避障功能的移动探测车。上位机与下位机通信采用串口通信方式,以LabVIEW 2015为主软件,将Robotics 2015、Sensors、FPGA、Real-Time、Processing Targets等辅助工具包嵌入到主软件,通过在LabVIEW Robotics 2015软件编程设置移动探测车手动启停、自动避障功能。测试表明:该平台的搭建不仅可以实现移动探测车避障功能,而且有利于编程简单化和减少工作量。
移动式探测车; 避障功能; LabVIEW Robotics; DaNI2.0平台
如何实现机器人快速避开障碍物,到达指定地点是研究移动机器人的重点[1-2]。目前,多数研究主要集中在路径规划与避障的算法上[3-5],如改进遗传算法、蚁群算法、鱼群算法,仿真结果表明以上算法具有一定的可行性,但是算法复杂、开发工作量大。以高校实验室为主的移动机器人避障的开发,可以在一定程度上解决算法带来的不足,文献[6-8]运用LabVIEW软件在实验中完成实验系统的设计;文献[9-11]用LabVIEW软件与硬件平台结合完成实验平台的设计与检测;文献[12]将LabVIEW软件与教学相结合,搭建了适合学生自主学习的仿真平台。
1 系统构建方案
1.1 硬件系统介绍
硬件部分采用Parallax公司的PING系列产品的超声波传感器,频率为40 kHz,探测距离范围为0~3 m,可以完成精确的非接触式测量;伺服电机采用2个12 V的直流电机,分别驱动小车左右轮;前轮为万能导向轮,旋转范围360°;Single-Board RIO嵌入式控制器开发板控制模块用NI Single-Board 9632为核心,控制器处理速度为400 Hz,内存128 MB,内置集成了实时处理器(Real-Time模块),2 MB可重复设置现场可编程门阵列(FPGA模块)、模拟和数字I/O,并可扩展内置模拟和数字I/O。上位机是本地计算机,运行在LabVIEW 2015 软件平台上,进行程序的编写和下载到控制器;上位机负责与下位机的通信,为远程用户提供访问服务以及数据采集,下位机由以上硬件负责,通过传输线与上位机连接,从而实现对移动探测车的控制。DaNI 2.0探测车测试平台见图1。

图1 DaNI 2.0探测车测试平台
1.2 软件系统介绍
LabVIEW 2015是美国国家仪器公司(National Instruments,NI)推出的一款以“图形化语言”为方式的集成化程序开发软件,其用图标代替传统编程的文本,建立应用程序的图形化编辑语言。实验人员可以通过友好的图形界面及图形化编程语言控制实验平台运行,完成对控制信号的采集以及对输出信号的分析等,并可以通过修改输入参数,得到不同的控制效果。LabVIEW Robotics 2015软件(工具包)除了提供标准的用于设计探测车和自主控制系统的程序,还提供了丰富的探测车函数库,集成了智能操作和感知的运动控制基础算法,可以用于设计探测车传感器和执行机构。此外,还将Sensors、FPGA、Real-Time、Processing Targets等辅助开发软件(工具包)内嵌到LabVIEW 2015主软件以配合使用、编程,缩短设计开发时间。LabVIEW Robotics 2015开发程序基础图见图2。

图2 LabVIEW Robotics 2015开发程序基础图
2 避障功能总体构思
移动探测车系统以NI LabVIEW Robotics Starter Kit 2.0硬件平台为基础进行拓展和开发。采用两轮差速转向式的机械机构:前面2个轮是主动轮,由2台直流伺服电机驱动,后轮采用一个支撑架,在支撑架下方安装转向摩擦的轮子(功能类似于万向轮)。这样,可以通过控制驱动轮电机的速度来移动探测车的方向和速度。超声波测距传感器发射40 MHz超声波信号,并对超声回波进行接收,经嵌入式控制器运算处理,实现探测车对前端障碍距离的检测,PC机通过传输线与探测车的控制器连接,将采集的信号送至PC机的相应软件界面显示,PC机安装LabVIEW 2015及Robotics 2015、Sensors、FPGA、Real-Time、Processing Targets等辅助软件(工具包),从而实现避障功能。总体构思结构框图见图3。
3 系统软件设计及开发
机器人避障功能设计采用LabVIEW 2015和Robotics 2015以及其他工具包为软件开发平台,该设计有3部分内容,即前面板的设计、框图和程序的设计,以及目标和连接器的配置。LabVIEW程序设计采用了模块化、结构化的方法,在编写程序框图前,首先要确定编程所需要的各个函数功能模块,然后再编写程序,最后根据各个模块的功能要求拟定参数并进行调试和修改。编程的程序代码以程序框图表示,需在可执行程序框图中进行编程,前面板上为输入和输出功能模块,后面板为程序组成连接模块。程序框图包括前面板上系统初始化、系统参数配置、传感器数据采集和数据保存控件的连线端子以及函数、结构、连线等。程序设计流程见图4。
3.1 初始化模块
模块初始化中,前面板设置初始化的数值包括起点位置归零;因为终点位置是障碍物,无法在初始化环节设置,所以设置一个显示按钮,显示最终的障碍物距离。初始化中,机器人左右两轮伺服电机以及旋转角度均归零,以便在运动的过程中实时显示当前信息。此外,前面板中还有一个布尔量按钮和读取距离按钮。布尔量按钮用来对数值清零,距离按钮对数值进行保存并显示机器人行走的距离。初始化功能程序框图见图5。

图3 LabVIEW探测车避障功能总体结构框图
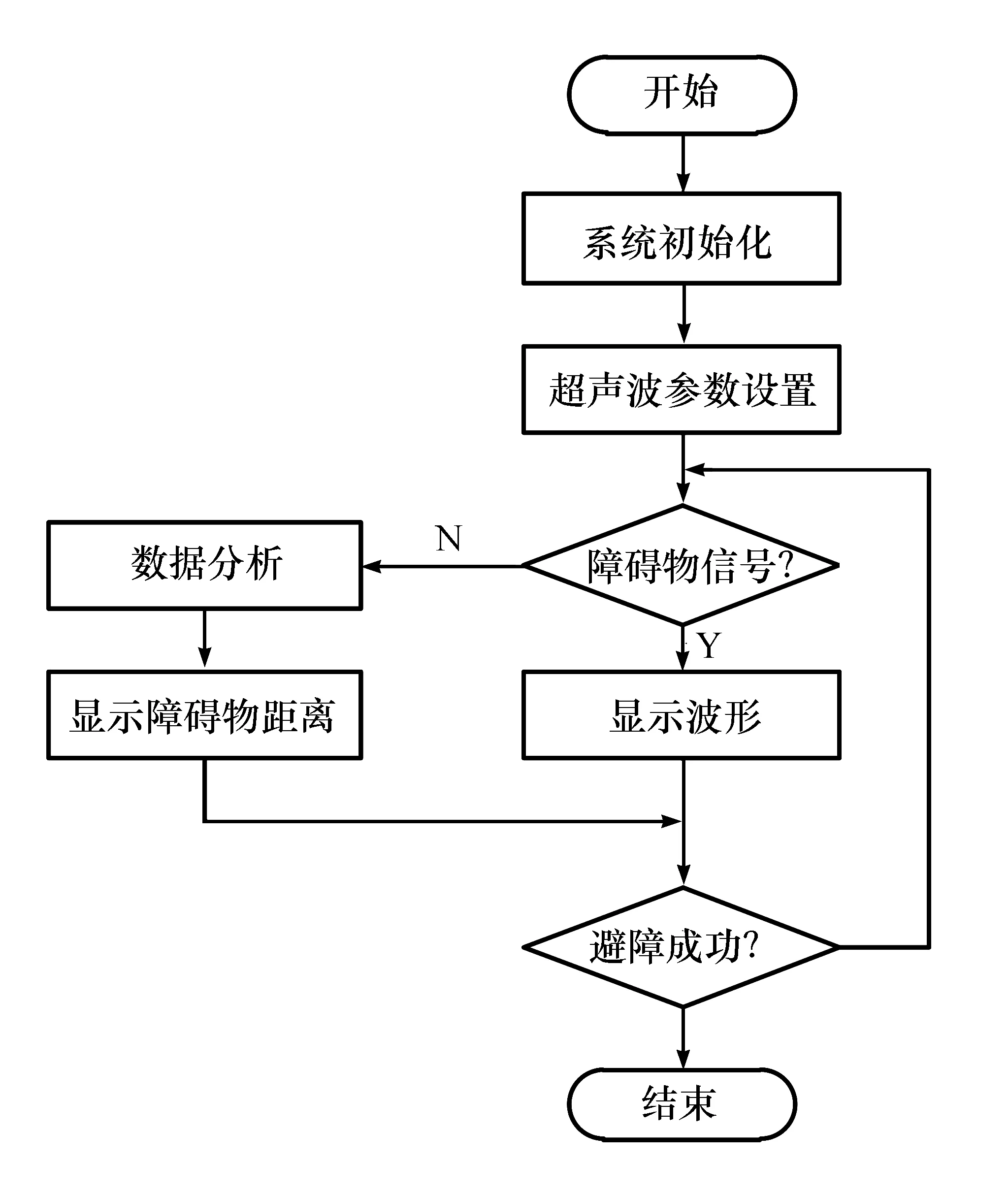
图4 程序设计流程图
3.2 电机循环控制模块
电机循环控制模块设计中,采用Robotics 2015 Starter Kit 2.0基础编辑图形,以单平铺方式展开。设计机器人左右两轮伺服电机循环控制,首先设置机器人与PC之间连接的IP地址,保证连接通畅;在单层平铺框中,设置机器人两轮的前进速度和传感器旋转角度;while语句中设置1 000 ms为一个循环周期,在while语句内部,选择条件框图,分别为“超时”条件、“停止”条件、“前进速度与旋转角度”条件等具有条件判断性的语句,每一个条件下都有相应的程序框图;while语句设置了4个移位寄存器,分别将探测车与FPGA通信的数据流、探测车运动数据流和错误数据流,在每次循环的终点又送回下一次循环的起点,以保证每次循环正确可靠。电机循环控制程序框图见图6。

图5 初始化功能程序框图

图6 电机循环控制程序框图
3.3 速度计算模块
控制器控制机器人的移动,当控制器将命令信号输出到驱动程序时,机器人的运动轨迹将遵循输出的命令信号。控制器给出典型的三段式运动速度曲线(包括加速、匀速和减速),加速段是梯形图的左边,从停止位置开始加速到规定的目标速度,达到目标速度至一定的时间段由控制器决定,设定距离障碍物的距离阈值,接近阈值时,开始减速段的减速运动,直到速度减到零,停止到设置的阈值距离。三段式运动速度v曲线见图7。

图7 三段式运动速度曲线
以加速阶段为例,传感器检测到障碍物的距离信号,并转化成电压信号,电压信号再转化成加速值,如下式:
式中,Vcc为基准电压,g为重力加速度,g=9.8 m/s2。
在while循环中,嵌套条件结构1和条件结构2,在结构中编写加速、匀速和减速的程序,此3个阶段的数值(寄存在X-Axis)都可在传感器上读取,a与X-Axis设置好的加速度相比较,若alt;-1为加速阶段,-1lt;alt;1.5为匀速阶段,agt;1.5为减速阶段,对应的加速程序框图见图8。

图8 加速运动速度程序框图
3.4 避障运动功能模块
避障运动功能采用二级平铺顺序结构设计。一级平铺顺序结构放置左、右电机和旋转角度的图形化程序;二级平铺顺序结构一方面放置机器人循环控制的图形化程序,保证对机器人的控制,另一方面,上位机与下位机之间的设置传输控制协议(TCP)要相符,保证超声波传感器测的数据准确无误,避障运动功能程序框图见图9。

图9 避障运动功能程序框图
4 结语
本文在LabVIEW Robotics Starter Kit 2.0硬件平台基础之上,进行了移动式探测车(机器人)的避障功能设计。重点介绍了设计的流程与步骤,采用图形化编程语言减少了设计开发的时间及工作量,完成了系统初始化、电机控制、速度计算以及避障等功能设计,最后顺利通过DaNI 2.0探测车平台现场演示,达到预期目标。
References)
[1] 尚伟燕,李舜酩.六轮腿式探测车行走机构结构设计及动力学分析[J].机械制造,2010(10):15-18.
[2] 路朋,谢丽蓉,常一峰,等.基于LabVIEW探测车运动功能的设计[J].实验技术与管理,2015,32(12):143-145,154.
[3] 石铁峰.改进遗传算法在移动机器人路径规划中的应用[J].计算机仿真,2011(4):193-195,303.
[4] 张银玲,牛小梅.蚁群算法在移动机器人路径规划中的仿真研究[J].计算机仿真,2011(6):231-234.
[5] 周利坤,刘宏昭.自适应人工鱼群算法在清罐移动机器人路径规划中的应用[J].机械科学与技术,2012(7):1085-1089.
[6] 杨明刚,贾艳丽.基于LabVIEW的公共场所分布式节能监控系统设计[J].实验技术与管理,2013,30(11):93-97.
[7] 赵莉华,张亚超,金阳,等.基于LabVIEW和Matlab虚拟实验室的实现[J].实验室研究与探索,2014,33(4):62-64,67.
[8] 陈福彬,柴海莉,高晶敏.基于LabVIEW的自动化测试平台的设计[J].国外电子测量技术,2012,31(11):9-14.
[9] 罗建,雷勇,黄昊,等.基于LabVIEW的远程电机实验台的构建[J].实验技术与管理,2014,31(3):122-125.
[10] 廖柏林,毛凯文,刘畅,等.基于LabVIEW的电子线路虚拟实验平台设计与实现[J].科技视界,2017(2):29.
[11] 张军,陶君,许振华,等.基于虚拟仿真技术的CAN总线柔性化测控实验平台[J].实验室研究与探索,2017,36(7):97-102.
[12] 周雅,殷志锋.LabVIEW环境下信号处理类课程信息化实验仿真平台[J].实验技术与管理,2013,30(1):137-140.
Design on obstacle avoidance function of mobile detection vehicle based on LabVIEW Robotics
Wang Zhongqiang, Xie Lirong, Wang Jinrui, Gao Lei
(College of Electrical Engineering, Xinjiang University, Urumqi 830047, China)
Based on the hardware platform of LabVIEW Robotics Starter Kit 2.0, and combined with the LabVIEW auxiliary toolkit, a mobile detection vehicle with obstacle avoidance function is designed. The serial communication method is used to communicate the host computer with the lower computer, and the LabVIEW 2015 is adopted as the main software to embed the assistant tool kits such as Robotics 2015, Sensors, FPGA, Real-Time, Processing Targets, etc., into the main software. Through the LabVIEW Robotics 2015 software programming, the manual start and stop, and automatic obstacle avoidance functions of a mobile detection vehicle are set up. The experimental results show that the platform can not only realize the obstacle avoidance function of the mobile detection vehicle, but also simplify the programming and reduce the workload.
mobile detection vehicle; obstacle avoidance function; LabVIEW Robotics; DaNI2.0 platform
10.16791/j.cnki.sjg.2017.11.022
TP242
A
1002-4956(2017)11-0086-05
2017-04-13
国家自然科学基金项目(51264036);新疆大学“运动控制系统”精品课程建设项目(XJU201202)
王忠强(1989—),男,陕西榆林,在读硕士研究生,主要研究方向为控制系统优化设计
E-mailxjdxwang@163.com
谢丽蓉(1969—),女,湖南衡阳,教授,研究方向为控制系统优化设计.
E-mailwzywwwxr@163.com
猜你喜欢
中学生数理化·高一版(2021年1期)2021-03-19 08:29:50
中学生数理化·高一版(2019年1期)2019-06-26 12:45:36
教学考试(高考物理)(2019年2期)2019-04-24 12:48:00
电子制作(2018年23期)2018-12-26 01:01:32
铜仁学院学报(2018年6期)2018-07-05 09:47:52
中学生数理化·高一版(2018年1期)2018-02-10 05:20:04
科学24小时(2017年5期)2017-05-19 02:39:34
筑路机械与施工机械化(2014年4期)2014-03-01 02:59:05
自动化博览(2014年9期)2014-02-28 22:33:17
自动化博览(2014年4期)2014-02-28 22:31:15