基于GIS和AIS的水上交通宏观态势评估系统
2017-11-07 09:21:14文元桥周春辉肖长诗张哲源
中国航海 2017年1期
黄 亮, 文元桥, 周春辉, 肖长诗, 刘 益, 张哲源
(1.武汉理工大学 航运学院, 武汉 430063;2.内河航运技术湖北省重点实验室, 武汉 430063; 3.国家水运安全工程技术研究中心, 武汉 430063)
基于GIS和AIS的水上交通宏观态势评估系统
黄 亮1,2,3, 文元桥1,2,3, 周春辉1,2,3, 肖长诗1,2,3, 刘 益1,2,3, 张哲源1,2,3
(1.武汉理工大学 航运学院, 武汉 430063;2.内河航运技术湖北省重点实验室, 武汉 430063; 3.国家水运安全工程技术研究中心, 武汉 430063)
为快速、准确地从海量的船舶轨迹中获取水上交通宏观态势,利用地理信息系统(Geographic Information System,GIS)技术在海量时空数据组织、统计分析及动态可视化等方面的优势,设计区域水上交通宏观态势评估系统总体架构,提出基于全球四叉树金字塔索引的船舶轨迹数据组织模式,引入水上交通流动态密度、速度场和宏观复杂度等3种态势评估因子,开发水上交通宏观态势评估原型系统。该系统能实时感知区域水上交通宏观态势及其动态变化,为水上交通安全管理和保障提供参考。
态势感知;四叉树金字塔索引;宏观复杂度;动态密度图;动态速度场
Abstract: A marine traffic evaluation system is developed for situation awareness by GIS (Geographic Information System) technologies, having outstanding advantages in organization, statistical analysis and visualization of spatio-temporal data. The overall framework of the evaluation system is designed based on C/S structure. The organization pattern of ship trajectory dataset based on the global quadtree and pyramid is proposed. Three factors, dynamic traffic flow density, velocity field and macroscopic complexity, are introduced for evaluating water traffic situation. A prototype system is developed and the design verified. The tests show that the system can capture dynamic changes of macroscopic marine traffic situation in real-time, and provide information for marine traffic security management.
Keywords: situation awareness; quadtree indexing; macroscopic complexity; dynamic density map; dynamic velocity field
随着我国水上交通运输业快速发展,水上通航环境日益复杂,安全监管形势日益严峻。水上交通态势反映区域内船舶交通流与通航环境交互活动的复杂状态及演变趋势,理解和掌握水上交通态势有助于提高水上交通管理效率及通航安全保障水平。
船舶自动识别系统(Automatic Identification System, AIS)数据不仅记录着船舶在地理空间的运动,同时反映船舶与他船及通航环境的交互过程,是进行区域水上交通态势评估的重要数据源。[1]目前,有关水上交通态势的研究主要集中在从宏观层面构建态势评估和预测模型,利用AIS数据定量计算典型态势指标,进而评估水上交通态势。文元桥等[2]引入“安全模态”的概念,融合多种水上交通要素评价水上交通系统安全在不同条件下的波动态势;赵嶷飞等[3]采用模糊综合评价方法,基于航路外部限制和自身状态2项指标评估航路交通态势等级;黄亚敏[4]从“复杂性”视角,利用交通流宏观特征和微观船舶行为特征评估水上交通态势;周梦婕[5]从船舶交通风险识别的角度,基于船舶碰撞风险和航行异常风险进行水上交通态势建模及计算。不同于上述“正向”态势评估模式,越来越多的研究者通过识别水上交通船舶异常行为感知水上交通态势,提出遗传算法[6]、混合高斯模型[7]、核密度估计[7]、支持向量机[8]、概率联想型学习[9-10]、模糊贝叶斯网络[11]和马尔科夫逻辑网络[12]等一系列检测方法。此外,考虑到理论模型缺乏可视化显示和指导,部分学者还引入可视化分析[13-15]和交互可视化[16]为管理者提供视觉上的船舶交通态势观察及辅助判断。
综上所述,已有研究为水上交通管理部门提供了多种态势感知方法,但主要以静态分析为主,仅通过局部范围内的船舶交通流验证方法的可行性,未考虑水上交通态势随时间演化的动态特征及大规模船舶交通流对算法时效性的挑战。因此,借助地理信息系统(Geographic Information System, GIS)技术的海量时空数据组织、统计分析和动态可视化能力,构建水上交通宏观态势评估原型系统,通过海量AIS数据的高效组织,基于动态可视化提供任意区域水上交通态势及其变化的快速感知,协助管理员进行态势判断。
1 水上交通宏观态势评估系统设计
1.1基于Client/Server模式的系统架构设计
水上交通宏观态势评估系统为多数据源、多功能模块集成的水上交通信息系统。该系统采用Client/Server(C/S)体系结构,将水上交通数据存储管理与分析应用分离,分别由服务端和客户端执行。系统总体架构分为AIS数据服务器、空间数据服务器和水上交通态势评估客户端等3部分(见图1)。

图1 水上交通宏观态势评估系统架构
1)AIS数据服务器负责组织、管理船舶AIS数据及建立全球四叉树金字塔空间索引,面向水上交通态势评估客户端提供空间维度、时间维度、属性条件及其组合形式的船舶AIS数据快速查询。
2)空间数据服务器负责存储和管理基础地理空间数据(包括矢量地图、影像地图、行政区划数据、水系、地名及路网数据等),接收客户端发送的地理空间数据瓦片请求,采用网络地图瓦片服务和瓦片地图服务将结果数据集发送至态势评估客户端进行显示,为水上交通态势评估提供地理环境参考。
3)水上交通态势评估客户端负责构建全球基础地理环境底图,为用户提供交互界面,对指定空间区域和时间区间内的水上交通态势进行评估,并动态展现态势评估结果。
1.2基于全球四叉树金字塔的船舶AIS数据组织模式设计
船舶AIS数据具有上传频率高、数据量大和覆盖范围广等特点,对海量AIS数据进行高效组织是进行区域水上交通态势评估的基础。根据AIS技术国际规范,AIS采用经纬度坐标记录船舶位置信息。在经纬网构成的地理坐标系统中,四叉树网格是最常见的空间数据组织方式之一。这里基于多粒度四叉树网格思想,采用不同尺寸的网格对地理空间进行剖分,构建全球多分辨率四叉树金字塔空间索引,建立AIS经纬度坐标与多级网格索引之间的映射关系,从而快速定位指定空间区域的AIS数据。
图2为AIS数据的全球四叉树金字塔空间索引逻辑,其中:第0层根结点覆盖全球,具有“1行×1列”个索引格;第1层将全球分为4个子半球,具有“2行×2列”个索引格;每个索引格的空间覆盖范围为上一层索引格内与其对应每个网格的范围;依次推算,第n层的索引格将在第n+1层被切分为4个子格。因此,全球四叉树金字塔能为AIS数据提供不同空间尺度下的多级索引。
在全球四叉树金字塔中,每个索引格都具有唯一的编码值GID{xrow,ycol,zlevel},其中:zlevel为索引格在四叉树金字塔中的索引层次;xrow为索引格在第zlevel层索引中的行码;ycol为索引格在第zlevel层索引中的列码。四叉树金字塔每个索引层的行列编码起点(0, 0)位于左上角,行码自左向右递增,列码自上向下递增。基于上述索引编码方法,对于任意经纬度坐标(λ,φ),可采用式(1)和式(2)快速计算该点在全球四叉树金字塔任一索引层次中的索引格编码值GID{xrow,ycol,zlevel}。
xrow=

2Zlevel-1(φ/180+1)

(1)
(2)
1.3基于全球四叉树金字塔的船舶AIS动态数据存储结构设计
船舶AIS数据分为静态数据和动态数据2类,记录船舶自身属性信息和船舶航行相关属性信息。面向态势评估应用,设计船舶动态信息表和船舶索引信息表对船舶AIS数据进行存储。
表1为船舶动态信息表数据结构,每条记录均包含船舶编码、经纬度、接收时间、对地船速、对地航向及四叉树金字塔索引编码值等信息。全球四叉树金字塔一旦建立,表1中每条记录都将存储四叉树金字塔最低索引层级的编码值。除主键MMSI(Maritime Mobile Service Identity)编码和接收时间外,对最低索引层行编码、最低索引层列编码和最低索引层级建立BTREE索引,可实现AIS动态数据的快速查询。

表1 船舶动态信息表数据结构
表2为船舶索引信息表数据结构,存储有全球四叉树金字塔最低索引层级的索引格在其他索引层级的父节点编码值,每条记录均包含1个索引格在最低索引层级和其他索引层级中的编码值。船舶动态信息表通过最低索引层的索引格编码(BTMLEVEL,BTMROW和BTMCOL)与船舶索引信息表关联,从而获取不同索引层级下的索引格编码,实现多尺度船舶动态数据的快速查询。

表2 船舶索引信息表数据结构
2 基于DotSpatial的水上交通宏观态势评估系统实现
2.1DotSpatial开源组件
DotSpatial是GIS开源软件中功能比较全面、扩展性和维护性比较好的开源类库,采用C#.NET语言开发完成,模块化的设计思想方便用户根据实际应用灵活扩展新功能。[17]对此,借助DotSpatial组件的空间数据组织、分析和可视化能力,采用C#.NET平台开发水上交通宏观态势评估系统客户端(见图3)。系统服务端空间数据服务器采用网络服务方式接入OpenStreetMap地图数据实现,并以网络地图瓦片服务的形式向态势评估客户端提供基础空间数据。AIS数据服务器采用MySQL数据库实现,依据“1.3”节中的存储结构依次建立船舶动态信息表和船舶索引信息表。

图3 水上交通态势评估原型系统界面
2.2系统功能实现
面向水上交通态势评估,系统引入动态密度、速度场和复杂度等3个影响因子进行计算,并采用动态栅格图展现区域水上交通态势评估结果及其变化。在客户端功能菜单区域,系统提供用户水上交通流动态密度、水上交通流动态速度场和水上交通流宏观复杂度查询等功能。
2.2.1水上交通流动态密度
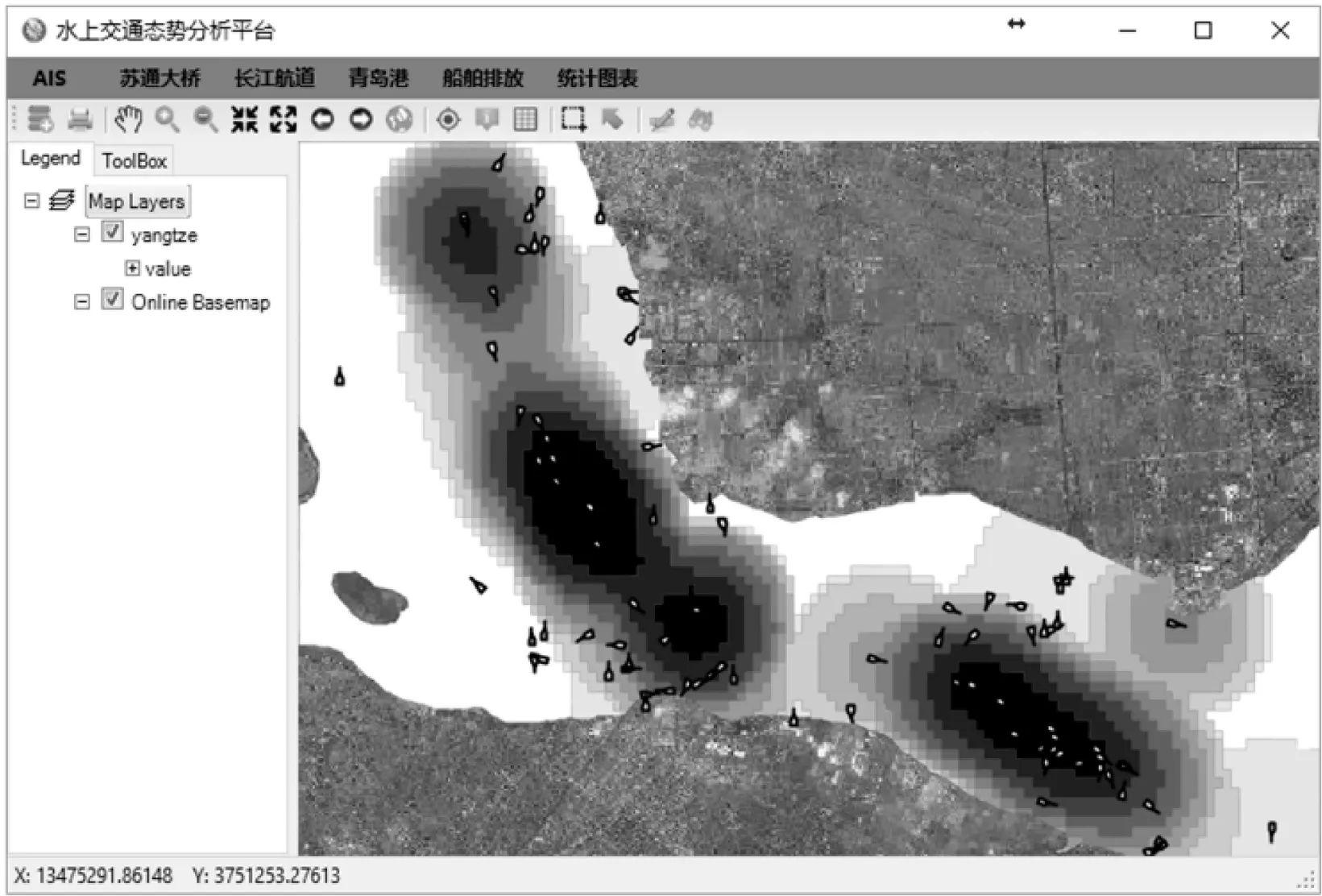
水上通航环境中的船舶聚集程度[4]是区域水上交通宏观态势评估中的一个重要因子,船舶聚集越密集的区域,水上交通态势越复杂。系统采用动态密度图展示目标水域在某时间范围内的船舶聚集程度(见图4)。系统依据用户输入的时间参数,从AIS数据服务器中查询视场范围内可航水域的船舶经纬度信息,统计单位面积内的船舶数量,经高斯分布插值后形成实时水上交通密度图,并以1 min为周期动态更新统计结果。图4a和图4b分别为长江入海口水域在2015年6月1日13:10和13:30时刻的交通流密度统计结果,灰度值越大的区域交通流量密度越高。对比图4a与图4b可知,在苏通大桥、长兴岛附近水域,船舶后一时刻的聚集程度明显高于前一时刻。基于水上交通流动态密度图,管理者能重点监控船舶密集区域,感知交通拥塞和交通事故的发生。
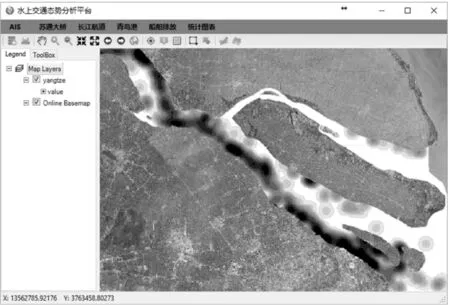
a) 2015年6月1日13:10密度场

b) 2015年6月1日13:30密度场
2.2.2水上交通流动态速度场
水上通航环境中的船舶迫近程度[4]是区域水上交通宏观态势评估中的另一个重要因子,船舶迫近越紧迫的区域,水上交通态势越复杂。系统采用动态速度场展示目标水域在某时间段内的船舶迫近程度(见图5)。系统依据用户输入的时间参数查询视场范围内可航水域的船舶对地航速信息,采用基于统计模型的反距离加权插值法获取实时水上交通速度场,即根据某点的估计值与周围已知采样点速度值的距离平方倒数呈线性关系,以空间距离的加权平均进行计算,并以1 min为周期动态更新计算结果。图5a和图5b分别为苏通大桥周边水域在2015年6月1日13:25上行和下行船舶速度场,灰度值越大的区域交通流速度值越大。借助水上交通流动态速度场,管理者能直观地了解区域水上交通速度分布和异常情况。对比图5a与图5b可知,苏通大桥水域有船舶在长江两岸相向航行,长江沿线航行的上行船舶和下行船舶均在苏通大桥减速,以避免碰撞,这种隐含知识有助于管理者进行水上交通安全监管。

a) 2015年6月1日13:25上行速度场
b) 2015年6月1日13:25下行速度场
2.2.3水上交通流宏观复杂度
水上交通流宏观复杂度以位置相近且行为相似的船舶交通簇为基本研究单元,通过定量计算区域内交通簇的运动趋势和分布特征描述管理人员认知交通的难易程度。[4]宏观复杂度越高的区域,水上交通态势越复杂。基于文献[4]提出的交通流宏观复杂度计算模型,系统依据用户输入时间参数查询视场范围内可航水域的船舶位置、长度、宽度、航速和航向等信息,利用交通流聚类分析获取区域内所有的交通簇,依次计算各交通簇的认知复杂度,通过高斯核密度估计获取区域内的复杂度地图。系统采用动态复杂度图展示目标水域在某时间段内的交通流复杂程度(见图6),并以1 min为周期动态更新计算结果。图6中:冷色调表示复杂度低的区域,暖色调表示复杂度高的区域;椭圆区域是苏通大桥对江航行经过路线,同时存在靠泊船舶和航行船舶。该区域交通簇分布密集,且相对航速和航向差异较大,导致宏观复杂度呈现高值;矩形区域是苏通大桥锚泊区域,虽然区域内交通簇分布较为密集,但船舶运动趋势相互不冲突,因此呈现较低的复杂度。基于交通流复杂度地图,管理者能更容易理解和掌握水上交通状态的复杂情况。
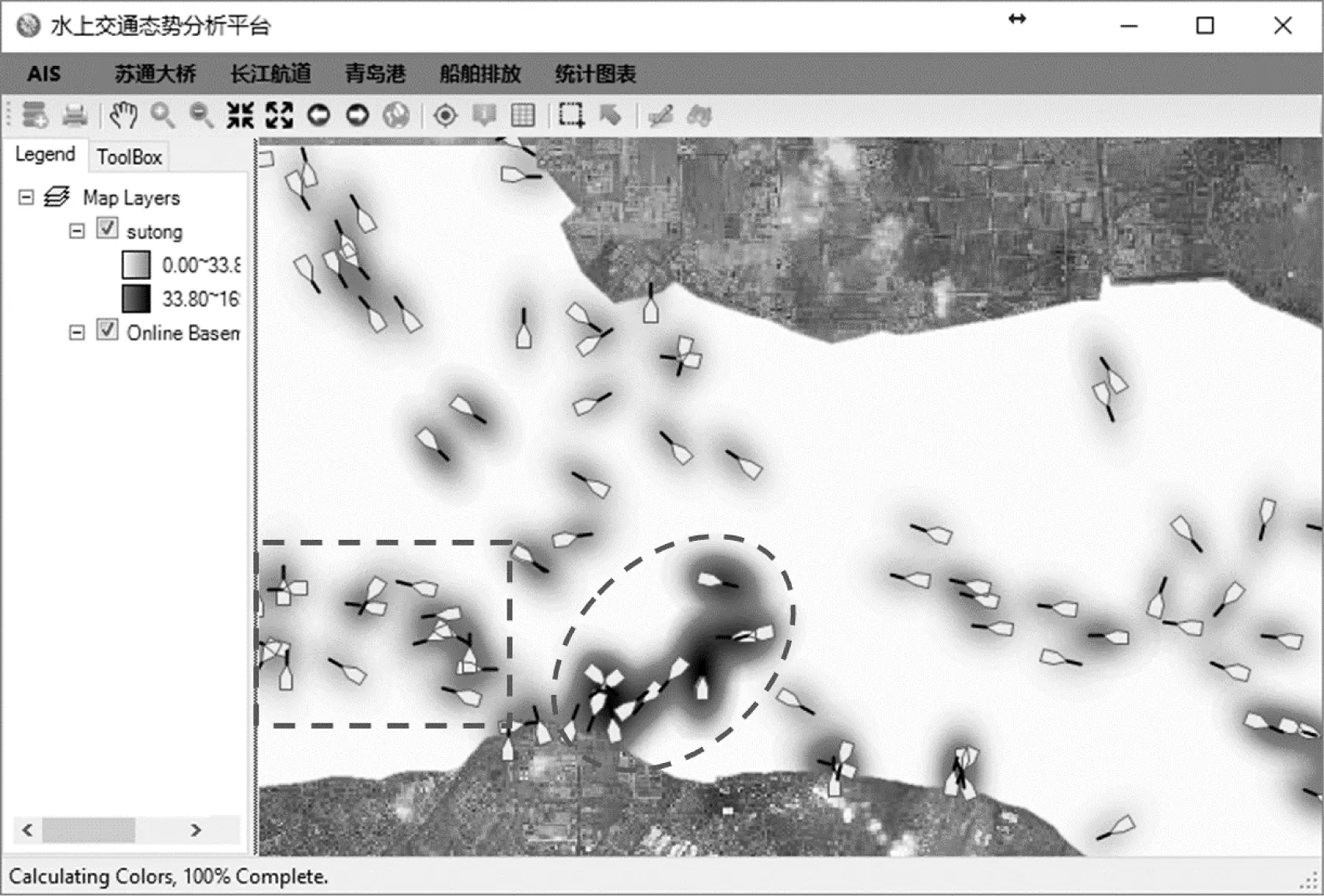
图6 2015年6月1日13:30苏通大桥区域水上交通复杂度地图
3 结束语
结合GIS软件和时空数据库技术开发水上交通宏观态势评估原型系统,基于AIS数据的空间表达特点设计基于全球四叉树金字塔的船舶AIS数据组织模式,提高AIS数据存储和查询的效率;将水上交通流动态密度、速度场和宏观复杂度等3种态势评估因子模块化,采用动态可视化表达实时展现区域水上交通宏观态势及其动态变化,协助船舶进行水上交通安全管理和保障。
[1] GREIDANUS H, ALVAREZ M, ERIKSEN T, et al. Basin-Wide Maritime Awareness from Multi-Source Ship Reporting Data[J]. Transnav International Journal on Marine Navigation and Safety of Sea Transportation, 2013, 7(2): 185-192.
[2] 文元桥, 吴定勇, 张恒,等. 水上交通系统安全模态定义与建模[J]. 中国安全科学学报, 2013, 23(6): 32.
[3] 赵嶷飞, 史永亮.基于模糊综合评价的航路交通态势评估[J]. 中国民航大学学报, 2011, 29(1): 5-8.
[4] 黄亚敏. 水上交通复杂性测度研究[D]. 武汉:武汉理工大学,2014.
[5] 周梦婕. 船舶交通风险识别与评估研究[D]. 杭州:
浙江大学,2014.
[6] CHEN CH, KHOO LP, CHONG YT, et al. Knowledge Discovery Using Genetic Algorithm for Maritime Situational Awareness[J]. Expert Systems with Applications, 2014, 41(6): 2742-2753.
[7] LAXHAMMAR R, FALKMAN G, SVIESTINS E. Anomaly Detection in Sea Traffic-a Comparison of the Gaussian Mixture Model and the Kernel Density Estimator[C]//International Conference on Information Fusion, 2009: 756-763.
[8] HANDAYANI DOD, SEDIONO W, SHAH A. Anomaly Detection in Vessel Tracking Using Support Vector Machines (SVMs)[C]//International Conference on Advanced Computer Science Applications and Technologies, 2013: 213-217.
[9] BOMBERGER NA, RHODES B J, SEIBERT M, et al. Associative Learning of Vessel Motion Patterns for Maritime Situation Awareness[C]//International Conference on Information Fusion, 2006: 1-8.
[10] RHODES BJ, BOMBERGER NA, ZANDIPOUR M. Probabilistic Associative Learning of Vessel Motion Patterns at Multiple Spatial Scales for Maritime Situation Awareness[C]//International Conference on Information Fusion, 2007: 1-8.
[11] MASCARO S, NICHOLSO A E, KORB K B. Anomaly Detection in Vessel Tracks Using Bayesian Networks[J]. International Journal of Approximate Reasoning, 2014, 55(1): 84-98.
[12] SNIDARO L, VISENTINA I, BRYAN K. Fusing Uncertain Knowledge and Evidence for Maritime Situational Awareness via Markov Logic Networks[J].Information Fusion, 2015,21(1):159-172.
[13] MATTHEWS ML, REHAK L, LAPINSKI ALS, et al. Improving the Maritime Surface Picture with a Visualization Aid to Provide Rapid Situation Awareness of Information Uncertainty[C]//Science and Technology for Humanity, 2009: 533-538.
[14] LAVIGNE V, GOUIN D, DAVENPORT M. Visual Analytics for Maritime Domain Awareness[C]//IEEE International Conference on Technologies for Homeland Security, 2011: 49-54.
[15] M RIVEIRO. Visual Analytics for Maritime Anomaly Detection[M]. Örebro: Örebro Universitet, 2011.
[16] RIVEIRO M, FALKMAN G, ZIEMKE T. Improving Maritime Anomaly Detection and Situation Awareness Through Interactive Visualization[C]//International Conference on Information Fusion, 2008: 1-8.
[17] 张弟. DotSpatia开源GIS软件开发与研究[D]. 上海:华东师范大学,2014.
EvaluationSystemofMacroscopicMarineTrafficSituationBasedonGISandAIS
HUANGLiang1, 2, 3,WENYuanqiao1, 2, 3,ZHOUChunhui1, 2, 3,XIAOChangshi1, 2, 3,LIUYi1, 2, 3,ZHANGZheyuan1, 2, 3
(1.School of Navigation, Wuhan University of Technology, Wuhan 430063, China; 2.Hubei Key Laboratory of Inland Shipping Technology, Wuhan 430063, China; 3.National Engineering Research Center for Water Transport Safety, Wuhan 430063, China)
周春辉(1978—),男,湖北松滋人,副教授,从事海事信息系统与航海仿真研究。E-mail: chunhui@whut.edu.cn
U666.158; U698
A
2016-10-10
国家自然科学基金(51679180; 51579204);中国博士后科学基金(2016M602382)
黄 亮(1986—),男,湖北孝昌人,博士后,从事船舶轨迹分析与可视化研究。E-mail: plaquemine@whu.edu.cn
1000-4653(2017)01-0053-05
猜你喜欢
科技创新与应用(2017年35期)2017-12-19 08:33:36
智富时代(2017年6期)2017-07-05 16:37:15
中国机电工业(2016年5期)2016-12-01 04:26:24
西南交通大学学报(2016年3期)2016-06-15 20:29:35
中国工程咨询(2016年1期)2016-02-14 06:47:44
河南电力(2016年5期)2016-02-06 02:11:23
中国机电工业(2015年5期)2015-02-28 08:36:38
建筑材料学报(2015年3期)2015-02-28 02:36:27
数学年刊A辑(中文版)(2014年1期)2014-10-30 01:48:12
物联网技术(2014年8期)2014-08-27 16:30:01