舶舶AIS轨迹异常的自动检测与修复算法
2017-11-07 09:21:14吴建华郭俊纬
中国航海 2017年1期
吴建华, 吴 琛, 刘 文, 郭俊纬
(1.武汉理工大学 航运学院, 武汉 430063;2.内河航运技术湖北省重点实验室, 武汉 430063)
舶舶AIS轨迹异常的自动检测与修复算法
吴建华1,2, 吴 琛1,2, 刘 文1,2, 郭俊纬1,2
(1.武汉理工大学 航运学院, 武汉 430063;2.内河航运技术湖北省重点实验室, 武汉 430063)
船舶自动识别系统(Automatic Identification System,AIS)轨迹是船舶位置和时间的记录序列,对船舶航行状态分析、船舶交通流预测及船舶海事事故分析等具有一定的意义,而受一些因素影响,采集到的AIS数据会产生错误,导致AIS轨迹出现异常。对此,在对大量AIS数据进行深入解析的基础上,归纳出AIS轨迹异常的几种类型,针对各类型的特征对船舶轨迹异常进行自动检测,并采用3次样条插值模型实现修复算法。研究成果可为基于船舶航行轨迹数据的相关研究提供快速、准确的技术支持。
船舶自动识别系统;轨迹异常;自动检测;轨迹修复
Abstract: The AIS(Automatic Identification System) trajectory of ship navigation, the recorded sequence of the location and the time of a ship, are valuable for ship sailing state analysis, maritime traffic flow prediction, and maritime accident analysis. However, due to the interferences of some factors, there sometimes exist errors in the collected AIS data, leading to the abnormity of AIS trajectory. Through in-depth analysis of a large amount of AIS data, this paper identifies several abnormal types of AIS trajectory. The automatic detection and restoration of trajectory anomalies are explored and an algorithm for that is developed with cubic spline interpolation model.
Keywords: AIS; trajectory anomalies; automatic detection; trajectory repair
船舶自动识别系统(Automatic Identification System,AIS)数据中蕴含着大量船舶信息,可通过提取这些信息了解船舶的航行状态,将其应用到船舶避碰、海事监控、轨迹聚类[1]、船舶交通流预测和海事事故调查等诸多航海领域中。AIS数据中最基本的信息是由时间和位置构成的时空位置点,将位置点标绘在电子海图上可形成船舶的航行轨迹线,实现船舶运动轨迹的可视化显示。在通航密集水域,船舶AIS数据量巨大,通过计算机编程可再现各艘船舶的航迹线,但受AIS信号传输、AIS设备等因素影响,接收到的AIS数据会产生错误,导致AIS轨迹出现异常(见图1)。显然,直接使用该航迹线无法正确获取船舶运动轨迹,当前普遍采用的处理方法是通过人工将异常的航迹线挑选出来加以排斥。该方法不仅效率低下,而且会丢失一些船舶信息。
对此,从大量AIS实测数据中挑选出AIS异常轨迹线,分析其异常的特征规律;将AIS轨迹异常归纳为几种类型,针对各类型的特征研究自动检测异常轨迹线的方法,并利用数学方法加以修复。
1 船舶AIS轨迹异常的分类
AIS应用广泛,在保障船舶安全航行、确保海事部门准确监控船舶交通流态势方面具有重要作用。然而,在通航密集水域,随着船载AIS数量不断增多,受AIS工作模式的制约,AIS网络通信逐渐显现出一些问题,从而影响AIS的正常使用。
船舶AIS轨迹是船舶航行时间和位置的记录序列,包含AIS网络的通信性能特征。通过采集通航密集水域船舶的AIS信息,并对其解码后反演出船舶AIS轨迹,对船舶AIS轨迹进行分析,可归纳出通航密集水域AIS的异常模式(见表1)。船舶轨迹异常分析图见图2。
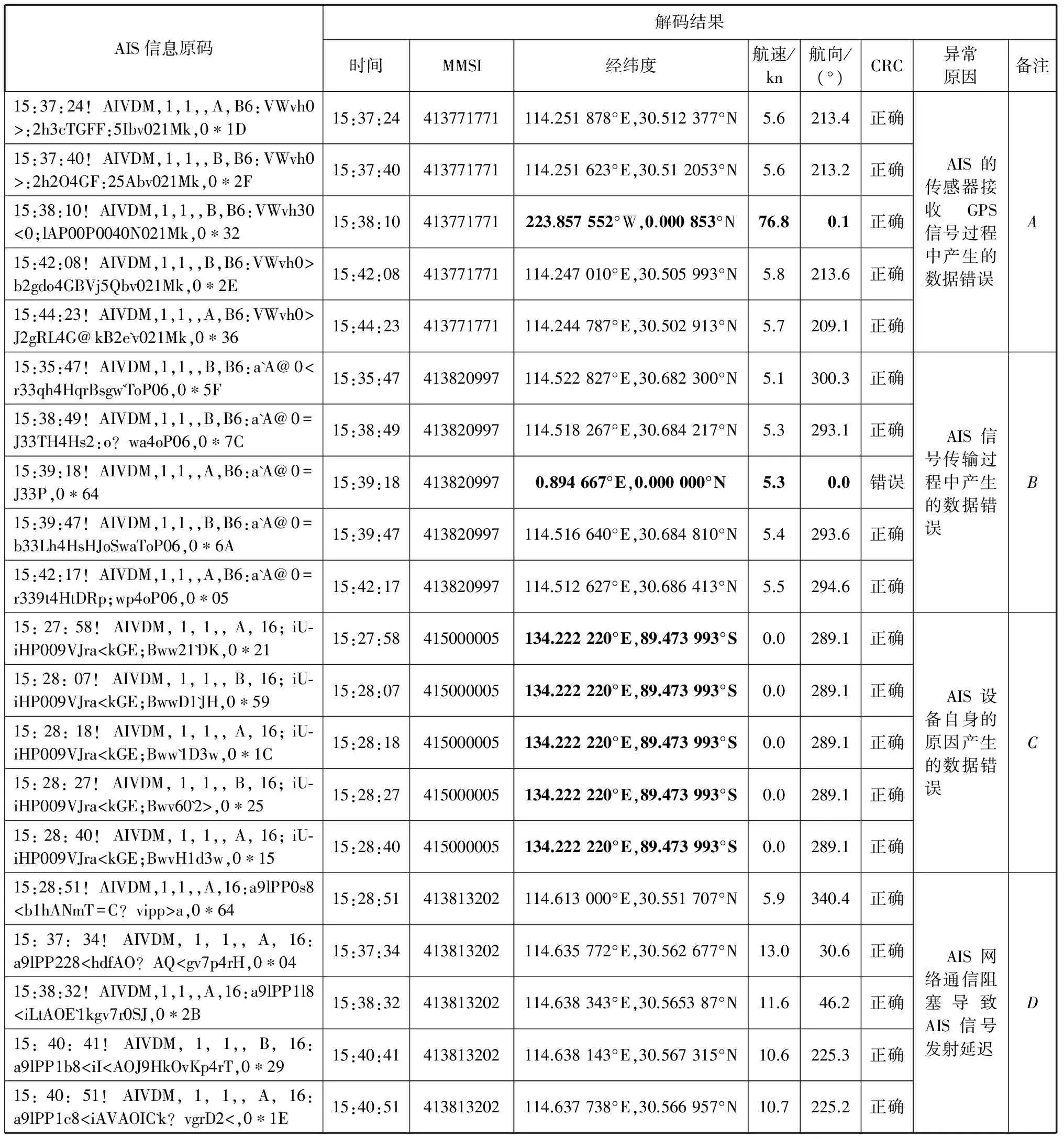
表1 船舶轨迹异常分析表
1.1AIS传感器接收GPS信号过程中产生的数据错误
全球定位系统(Global Positioning System, GPS)接收机作为AIS中提供船位、航速和航向等信息的传感器,将接收到的船舶航行信息通过AIS广播给其他船舶和基站。GPS接收机在接收卫星信号时可能会受外界因素的影响(或其他原因)而导致航行信息出现错误并将其直接发送出去,接收方获得的是该船舶错误的航行信息。
1.2AIS信号传输过程中产生的数据错误
即使GPS接收机接收的航行数据正确,AIS在通过甚高频(Very High Frequency, VHF)传输信息的过程中也会受外界因素的干扰导致航行信息出现错误。因为在传输过程中或传输链路上会出现bit错误,导致在链路上传输的1个或多个帧遭到破坏(出现bit差错,0变为1或1变为0),从而使接收方得到船舶错误的航行数据。通过对AIS发送的信息进行CRC校验码检测可确认该现象是由数据传输错误导致的。
1.3AIS设备自身原因产生的数据错误
受AIS设备内部设置等因素影响,该船舶所有的位置数据都是错误的(例如设备的GPS发生故障),从而导致错误的位置数据被传输出去。因此,虽然可接收到该船舶的AIS信息,但无法在船舶轨迹异常分析图上显示。
1.4AIS网络通信阻塞导致AIS信号发射延迟
在通航密集[2]水域,由于船舶数量多且受AIS工作机制的制约,导致网络通信阻塞、AIS无法预约或侦听到空闲时隙,不能在规定的时间内发射,从而导致发送AIS信息延迟,在船舶AIS轨迹上就会出现较长的时间间隔。
2 AIS轨迹异常的特征分析
针对AIS轨迹异常的4种类型,提取其信息及轨迹特征进行分析,以便得到有针对性的自动检测和修复方法。
2.1AIS的位置传感器导致的轨迹异常特征
对于表1中A的位置坐标(223.857 552°W,0.000 853°N),其与前后轨迹位置点的逻辑关系明显不符,使得船舶轨迹点出现中断现象。通过分析该船舶AIS信息的校验码可知,该位置数据错误在AIS信息传播前就已存在,属于AIS位置传感器在接收位置信息时产生的数据错误并将该数据传输出去,使接收方接收到错误的信息,通过判断船舶轨迹点的逻辑关系加以识别和修补。
2.2AIS信号传输过程导致的轨迹异常特征
对于表1中B的位置坐标(0.894 667°E,0.000 000°N),其与前后轨迹位置点的逻辑关系明显不符,分析接收到的AIS信息发现CRC校验错误,在实际AIS设备中会自动过滤掉CRC校验错误的AIS语句,因此这种由于AIS信息传输产生的错误不需要修复。
2.3AIS设备原因产生的轨迹异常特征
对于表1中C的位置坐标(134.222 220°E,89.473 993°S),接收到该船舶的所有AIS位置数据均不在正常的AIS通信范围内,属于AIS设备故障或人为设置使接收到的AIS信息错误,会对AIS数据的有效使用产生影响。对于不能正确使用AIS设备的错误类型,可通过基站监控督促其更新,该类型的异常情况可通过判断船舶的位置范围加以检测,但无法修复。
2.4AIS网络通信阻塞导致的轨迹异常特征
对于图2中的D,AIS网络通信信道拥塞造成的数据传输延迟使得AIS航迹线在一些点与点之间的间距较长,超过AIS信息更新所规定的时间后仍未更新,在弯曲通航水域呈现为直线。数据更新频繁易产生信道拥塞问题。该类型异常可根据信息更新时间、船舶速度及轨迹点之间的距离三者间的关系加以检测,并采用数学插值法予以修复。
3 AIS轨迹异常点的自动检测
通过观察大量AIS数据在电子海图上再现航迹线时,会发现有些异常点使得航迹线在电子海图中出现中断或超长的现象,因此反演船舶轨迹时需对AIS数据进行预处理,判断是否存在异常点,为后续修复处理及绘制轨迹线打好基础。在对AIS轨迹异常进行分类并分析其特征的基础上,除B类异常点外,其他类型的异常点均需通过开发计算机程序实现自动检测。
3.1A类轨迹异常点的自动检测
在船舶航迹线中,若某轨迹点的位置与相邻点之间的逻辑关系明显不符合规律,则可通过比较相邻两点之间经纬度的差异来判定异常点。若经纬度符号不同,则可直接判断为异常点;若经纬度符号相同,则可根据两点之间的经纬度差值所对应的逻辑距离来判断异常点。
假设P1,P2,…,Pn为一系列船舶轨迹点,若以AIS信号最长更新时间3 min,极限航速102.2 kn来设定最大航迹距离5.11 n mile,对应的经度差为0.099 1°,纬度差为0.085 3°,则检测相邻两位置点之间的经纬度差时异常点的判定依据为
Δλ(Pn,Pn+1)=λ(Pn+1)-λ(Pn)≤0.099 1°
(1)
Δφ(Pn,Pn+1)=φ(Pn+1)-φ(Pn)≤0.085 3°
(2)
当检测到两点间的经纬度差有任意一个不满足以上条件时,判定其为异常点。
3.2C类轨迹异常点的自动检测
若得到的AIS位置数据均不在正常的AIS通信范围内,则可判断其为C类异常点。通过设置研究区域内的右上角经纬度和左下角经纬度构成的矩形区域,判断AIS位置数据是否落在该区域内,实现自动检测。在弯曲航道,通过将航道栅格化判断AIS位置数据是否在栅格内,并作进一步细化检测:将航道划分为n个栅格,假设第n个栅格区域左下角的经纬度为Qn(λnl,φnl),右上角的经纬度为Qn(λnr,φnr),对于任意AIS正常位置点Pi(λi,φi),应存在Pi∈(Q1,…,Qn),若Pi不在该栅格区域内,则直接判断该点为异常点。
3.3D类轨迹异常点的自动检测
船舶航迹线相邻的2个位置点为Pn(λn,φn)和Pn+1(λn+1,φn+1),两点之间的实际距离为D1(λ,φ);利用船舶航速[3]及所规定的更新时间[4]计算航行的理论距离为D2(v,t),则2个位置点之间的距离差ΔD=D1-D2应小于某个阈值E(由试验确定),当ΔD≥E0时,所对应的位置点为D类异常点,即可检测出在规定的时间内,船舶AIS信息更新延时导致在航迹线图上出现超长的现象。
4 AIS轨迹异常点的修复
对于以上4种AIS数据异常,AIS设备本身和AIS数据传输过程中造成的轨迹错误无需修复,直接排除在轨迹线之外;而另外2种(A类和D类)则可根据文献[5],采用拟合插值[6]的方法对轨迹进行修复。由于轨迹异常主要表现为AIS位置点突变偏移[7]和接收信号延时造成位置点丢失或错误,展现的船舶轨迹相对于航道为近似直线轨迹和复杂曲线轨迹,因此主要对这2种情况进行分类讨论。
4.1直线AIS轨迹修复
当直线轨迹中出现异常点时,可根据正常点和船舶航行条件大致计算出修复点的位置,采用3次样条插值的方法计算修复的轨迹点。
首先建立3次样条插值模型[8],设ti为时间,xi为纬度,yi为经度。AIS直线原始轨迹见图3,AIS直线轨迹插值见图4。设3次样条函数S(t)在节点ti处的二阶导数值为Mi,则可得到3次样条表达式为
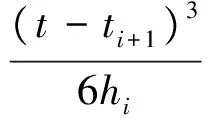

(3)
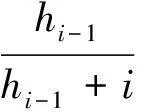
式(3)中:t∈[ti,ti+1],i=0,1,…,n-1;Mi为未知参数;hi=ti+1-ti。通过对S(t)进行求导得到S′(t),利用S′(ti+0)=S′(ti-0)可得
μiMi-1+2Mi+λiMi+1=di
(4)
由于方程式比未知数少,因此根据第一类边界条件补充i=1和i=n时的端点方程,最后可得到关于参数M0,M1,…,Mn的n+1阶线性方程组,其三弯矩阵方程为
(5)
根据式(5)求出M0,M1,…,Mn的值,即可求出轨迹的3次样条插值表达式,进而得到船舶航行轨迹。按照上述原理,通过MATLAB编程,将所选择的航迹点输入到程序中,通过运行计算得到拟合方程,进而求出修复后的正常轨迹点(见图5)。
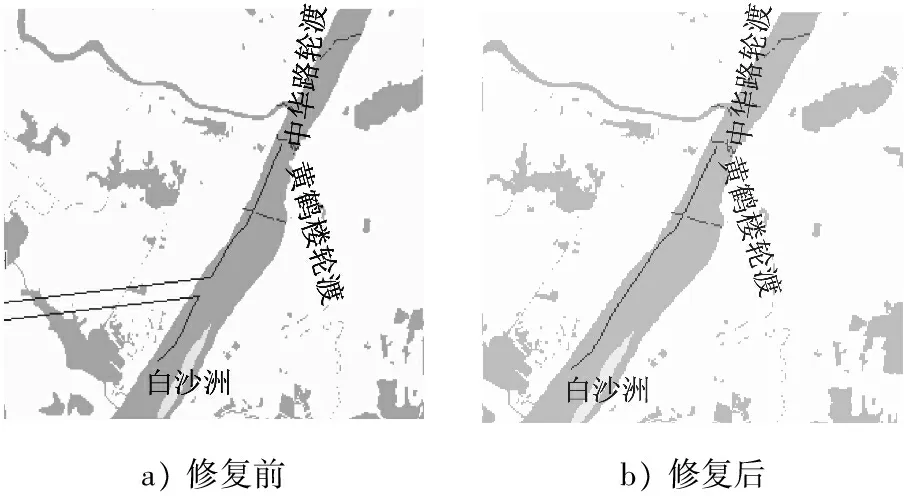
a)修复前b)修复后
图5A类异常轨迹
4.2曲线AIS轨迹修复
在简单的弯曲航道中,可通过求解拟合圆方程计算出弯道航迹的拟合方程,进而求出修复轨迹点;在复杂的弯曲航道中,可采用3次样条插值的方法求出修复轨迹点。
根据转弯航段船舶的轨迹点,利用最小二乘法[9]拟合曲线即可求得船舶的转弯半径。最小二乘法是通过最小化误差平方和来寻找数据的最佳匹配函数[10],方法如下。
设样本点为(Xi,Yi),i∈(1,2,…),拟合圆心为(A,B),半径为R,点(Xi,Yi)到圆心的距离为

(6)
di的平方与R的平方之差为
(7)
式(7)中:a=-2A;b=-2B;c=A2+B2+R2。令Q(a,b,c)为δi的平方和,即

(8)
将a,b,c代入到式(9)中可得A,B,R的估计拟合值为
(9)
根据式(9)得到曲率最大的航迹点的拟合圆的圆心和半径,即可得到船舶转弯段的航迹线方程;将实测的航迹线与计算出的转弯航迹线方程拟合,再通过3次样条模型进行插值计算。按照上述原理进行编程,将所选择的航迹点输入到程序中,经过运行计算后可得到拟合圆在航线上的轨迹点(见图6)。
根据航道弯道[11]中的4个已知航迹点拟合出弯道部分的航迹线,通过计算得到航道弯道中预测轨迹的修复点(见图7),从而实现轨迹的修复。曲线航迹修复前后的船舶轨迹见图8。最终修复后的AIS船舶轨迹见图9。
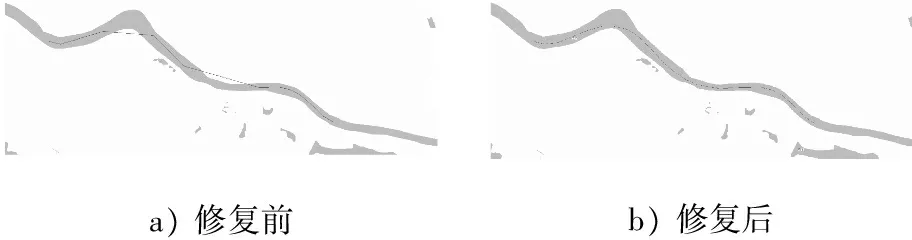
a)修复前b)修复后
图8 曲线航迹修复前后的船舶轨迹
5 结束语
本文对AIS的船舶轨迹异常进行分类,针对各类异常的特点进行分析,在此基础上探讨自动检测与修复方法。由于主要研究的是B类AIS,因此试验结果具有一定的局限性;雷达天线、VHF天线等可能会影响AIS的工作。在对船舶直线和弯道轨迹进行预测和修复的试验中,所设计的方法能较好地修复船舶轨迹,可为基于船舶轨迹开展船舶交通流预测和船舶海事事故分析研究提供参考。
[1] 肖潇,邵哲平,潘家财,等.基于AIS信息的船舶轨迹聚类模型及应用[J].中国航海,2015,38(2):82-86.
[2] 栾法敏.沿岸通航密集区航行风险识别、评估和控制[J].中国航海,2014,37(3):80-84.
[3] 王超,纪永刚,黎明,等.一种考虑船舶航速航向的AIS航迹插值方法[J].舰船科学技术,2015(4):60-64.
[4] 刘成勇.船舶自动识别网络系统设计及其性能仿真研究[D].武汉:武汉理工大学,2009.
[5] SANG LZ, WALL A, MAO Z, et al.A Novel Method for Restoring the Trajectory of the Inland Waterway Ship Using AIS Data[J].Ocean Engineering,2015,110:183-194.
[6] 刘立群,吴超仲,禇端锋,等.基于Vondrak滤波和三次样条插值的船舶轨迹修复研究[J].交通信息与安全,2015,33(4):100-105.
[7] 陈婷婷.基于AIS航迹拟合的船舶航迹带宽度计算与分析[J].珠江水运,2015(11):28-29.
[8] 鞠时光,郭伟刚.实用三次样条插值函数[J].小型微型计算机系统,1992(9):53-60.
[9] 田垅,刘宗田.最小二乘法分段直线拟合[J].计算机科学,2012,39(S1):482-484.
[10] 周翠,肖进丽,牟军敏. 基于AIS信息的船舶航迹带尺度确定与分析[J].武汉理工大学学报(交通科学与工程版),2015,39(6):1278-1282.
[11] 曹凤帅,姜俊杰,吴澎.海港航道转弯尺度设计参数研究[J].水运工程,2011(9):193-198.
AutomaticDetectionandRestorationAlgorithmforTrajectoryAnomaliesofShipAIS
WUJianhua1,2,WUChen1,2,LIUWen1,2,GUOJunwei1,2
(1. School of Navigation, Wuhan University of Technology, Wuhan 430063, China; 2. Hubei Key Laboratory of Inland Shipping Technology, Wuhan 430063, China)
U675.7
A
2016-10-21
国家自然科学基金(51279151)
吴建华(1963—),男,湖北汉阳人,教授,博士,主要从事交通信息及工程控制。E-mail:wujh63@sina.com
1000-4653(2017)01-0008-05
猜你喜欢
安徽师范大学学报(自然科学版)(2022年3期)2022-07-14 03:54:42
青年歌声(2019年12期)2019-12-17 06:32:32
电子制作(2018年19期)2018-11-14 02:36:50
电子制作(2018年9期)2018-08-04 03:30:58
电子测试(2018年11期)2018-06-26 05:56:16
制造技术与机床(2017年7期)2018-01-19 02:30:00
北京航空航天大学学报(2017年7期)2017-11-24 05:27:33
软件(2017年6期)2017-09-23 20:56:27
计算机测量与控制(2017年6期)2017-07-01 16:24:14
北京航空航天大学学报(2016年6期)2016-11-16 01:50:52