基于多参数控制的钻井事故监测预警系统
2017-11-01 05:42白丽丽孙文峰高金兰李宏玉
化工自动化及仪表 2017年7期
白丽丽 孙文峰 高金兰 李宏玉 任 爽
(东北石油大学 a.电气信息工程学院;b.石油工程学院)
基于多参数控制的钻井事故监测预警系统
白丽丽a孙文峰b高金兰a李宏玉a任 爽a
(东北石油大学 a.电气信息工程学院;b.石油工程学院)
以钻井液流量、液位和密度为控制参数,结合钻井现场实际工况,研发基于多参数控制的钻井事故监测预警系统。现场试验表明:该系统能够对钻井现场的各种工况进行实时监测并对井漏和溢流现象及时预警。
钻井事故监测预警 多参数
油田钻井施工过程中,一旦发生钻井事故,轻则造成巨大的财产损失,重则造成人员伤亡和地层污染[1]。建立完善的钻井事故监测预警系统对降低钻井施工风险意义重大。国外研发钻井事故监控系统的公司包括美国Varco公司、加拿大Datalog公司及英国Rigsery公司等,其事故预警系统能监测200多个钻井参数,并且能够实现对现场事故风险的远程实时监控[2]。但是国外的监测系统较庞大、功能复杂而且价格昂贵,并不适合我国的生产需求。国内多家科研院所也对钻井事故监测预警系统进行了研发,并取得了一定的成果[3,4],但是总体上还不成熟,相关产品的系统功能无法满足现场实际需求,并没有广泛应用[5,6]。国内一些传统的监测系统在建立预警模型时,认为出口流量大于进口流量即发生溢流事故,未考虑实际工况对钻井液流量的影响,因而预警的准确性难以保证。为此,笔者以钻井液流量、密度和液位参数为控制对象,开发了一套可以针对不同地质条件和工况状态,进行综合分析判断并发出报警信号的钻井事故监测预警系统。
1 系统总体结构
钻井事故监测预警系统通过监测钻井液总量、密度和进/出口流量变化,并进行数据处理判断分析实现高效预警。钻井事故监测预警系统(图1)包括数据采集、信号传输、数据处理和报警4个主要部分。为了提高测量精度和抗压程度,数据采集采用电磁流量计[7],同时采用非接触式钻井液密度仪,以避免数据远程传输的信息误差和介质测量元件的腐蚀。信号传输采用无线数据传输方式。数据处理系统包括监控主机和系统处理软件,用以监控主机接收采集信号,并与安全基准参数进行比较从而判断是否发出预警信号。
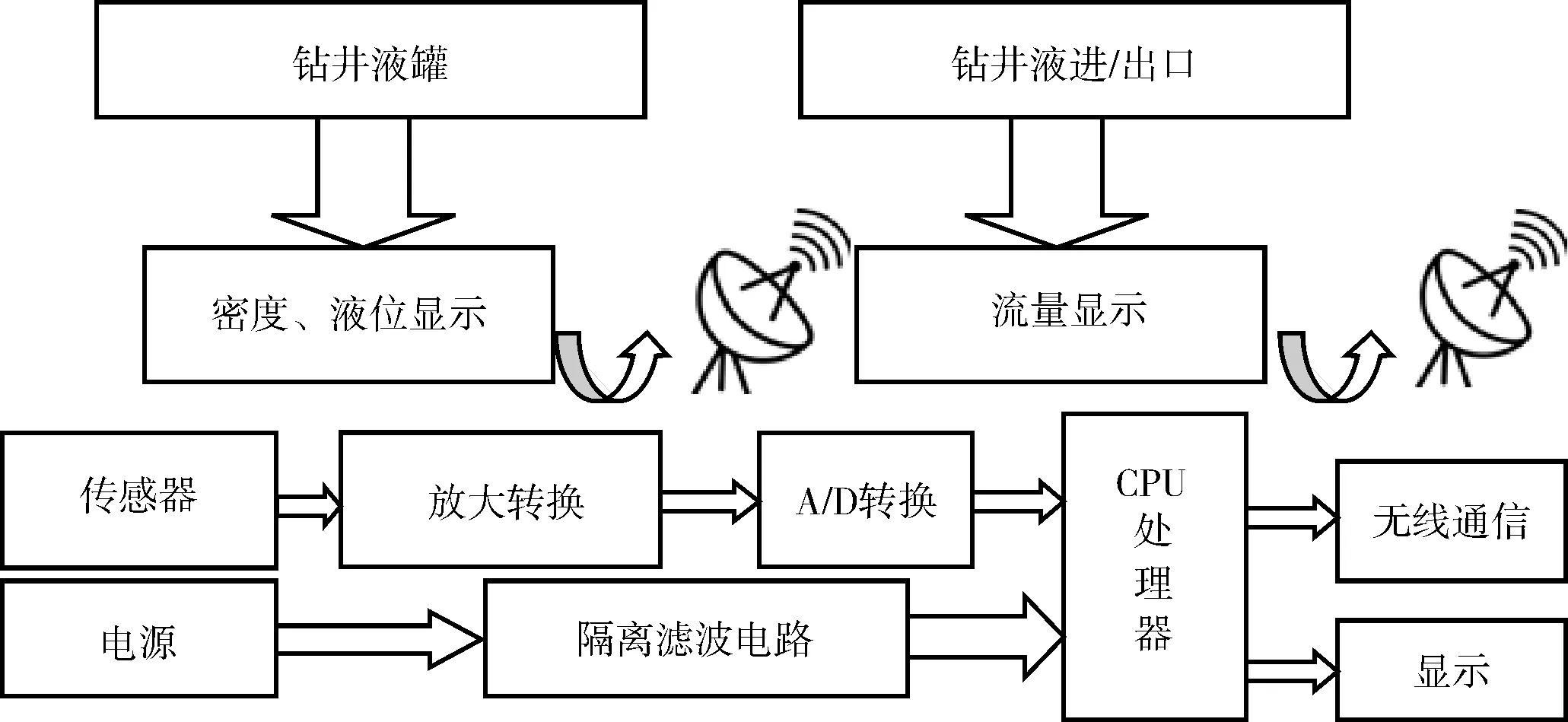
图1 钻井事故监测预警系统结构框图
2 硬件部分
基于多参数控制的钻井事故监测预警系统下位机需要处理的程序较为简单、占用空间少,I/O接口数也较少,因此在微处理器的选型上采用的是ATMEL公司的低档型芯片89C51。为提高测量精度和仪表抗压程度,出口处采用电磁流量计。采用自主研发的钻井液密度仪,应用气压平衡原理对介质密度进行测量,仪表非接触式的结构特点减小了误差并延长了设备的使用寿命。液位测量选用超声波液位计,其测量准确性高且稳定性好[8,9]。
系统配套传感器和监控设备的配置见表1。
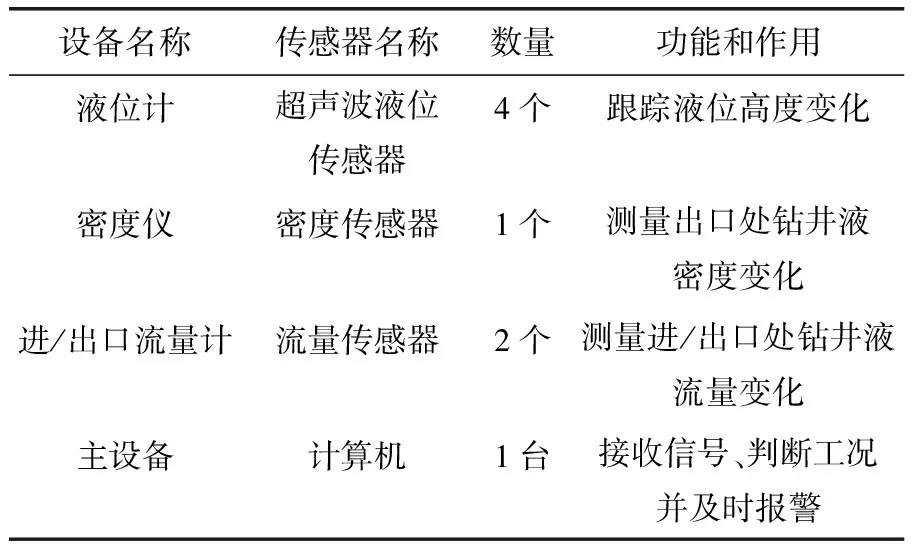
表1 系统主要监控设备和配套传感器
硬件选型完毕后,把进/出口流量计分别安放在进/出口管路上,在每个钻井液罐上安装液位计,为了准确测量出口处钻井液的密度,需要把密度仪装在第1个钻井液罐内;由于采用了远程数据传输,控制设备可以安置在较远的控制室内。钻井事故监测预警系统的硬件结构如图2所示。
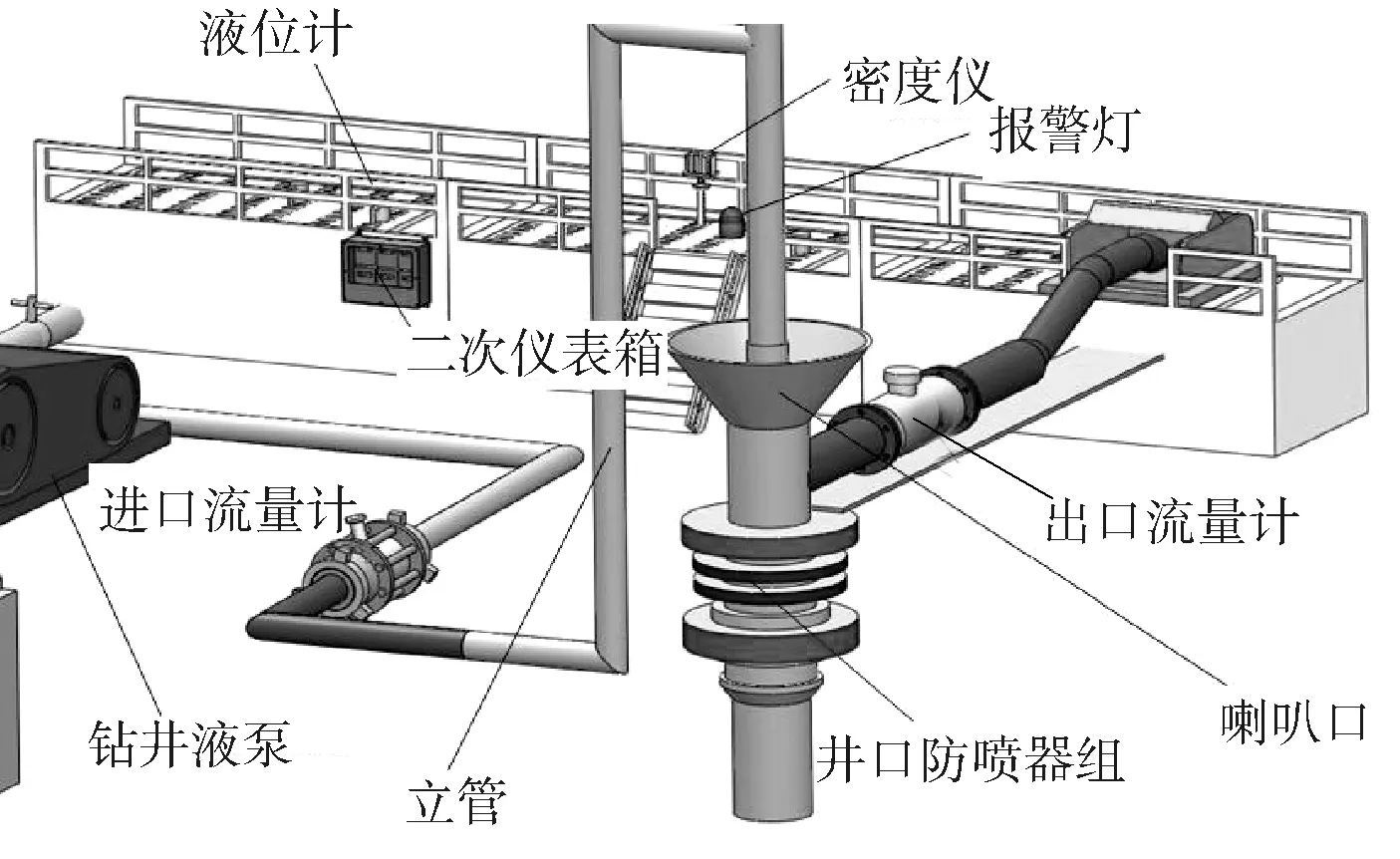
图2 钻井事故监测预警系统硬件结构
3 软件部分
3.1 系统软件流程和功能
监控软件是预警系统的核心,实现的功能是对进/出口流量计、液位计、密度仪采集的流量、液位和密度数据进行分析、处理与记录,并进行声光报警[10]。监控系统的软件控制界面包括联机界面、监测界面、控制界面、打印及查询等,为操作者提供了方便的人机接口。软件界面的数据和动态趋势曲线相结合,当发生预警信号时,及时弹出窗口显示系统判断的井况。也可以通过调整参数值有效减少误报和漏报的发生。
根据系统功能要求,编制的软件流程如图3所示。
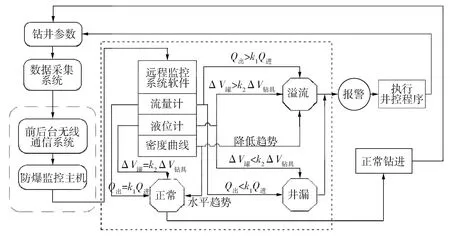
图3 钻井事故监测预警系统程序流程
3.2 建立系统数学模型
钻井事故监测预警系统的核心问题是预警模型的建立,根据实际工况确立科学合理的预警模型对于系统工作的稳定性和判断井下情况甚至减少错判漏判的发生至关重要[11]。
在钻进或循环工况下,钻井液液位保持不变,此时预警系统以流量Q和钻井液密度ρ为预警判定标准:
a. 如果Q出>k1Q进,此时,密度ρ降低,考虑为地下液体进入钻井液,预警系统判断存在溢流风险;
b. 如果Q出=k1Q进,预警系统判断为正常工作状态;
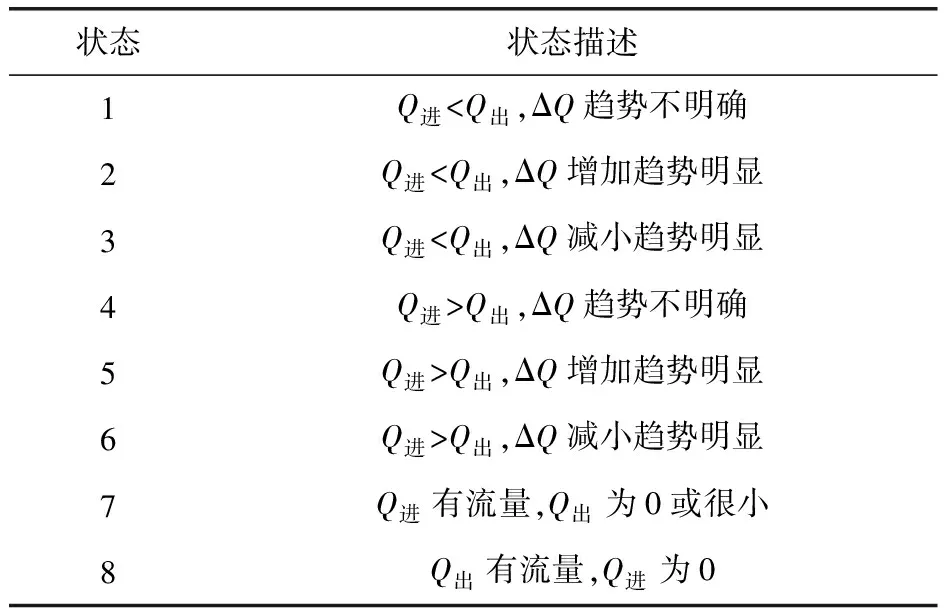
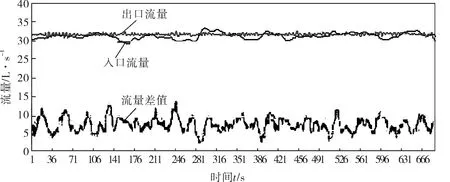
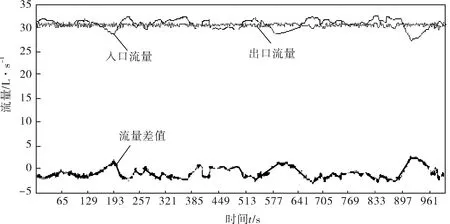
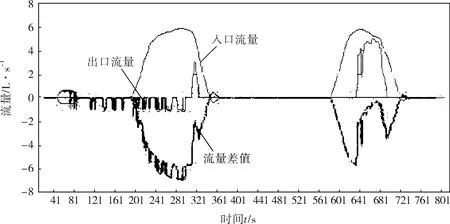
c. 如果Q出 在起/下钻工况下,流量必然有所变化,预警系统以液位V为预警判定标准: a. 如果ΔV罐>k2ΔV钻具,考虑为地下流体进入钻井液,预警系统判断存在溢流风险; b. 如果ΔV罐=k2ΔV钻具,预警系统判断为正常工作状态; c. 如果ΔV罐 理论上,当Q出>Q进时可以认为发生溢流;当Q出 将一段时间均匀分为n段(t1,t2,…,tn),钻进过程中,对应各时间点的进口和出口流量差为: ΔQi=Q进,i-Q出,i,i=1,2,…,n (1) 定义以ti为起始点连续时间序列上1 000个点的流量和Qi为: (2) 在正常钻进状态下,在以ti为起点的时间段中,以流量参数建立的数学模型判断井况的依据见表2。 表2 以流量参数建立的数学模型判断井况依据 预警系统实时检测数据并计算ΔQ出和ΔQ进,根据流量差历史数据计算流量差微分数值,同时结合流量变化获取流量差的变化趋势,结合液位和密度的差异即可做出综合判定,从而得到预警结论。 钻井现场工况复杂,钻进过程操作繁琐,使得系统实际应用情况变得很复杂。根据钻井工艺流程和上述判定模型,将预警系统工作状态划分为8类(表3),此8类状态涵盖了钻井现场的所有工况。 表3 常见的8种工况分类 基于多参数控制的钻井事故监测预警系统在大庆油田南254-平335井进行了现场试验。结果表明系统工作稳定,对现场模拟的各种工况都能够及时做出准确判断并及时报警。篇幅限制,仅以系统工作状态1和状态7这两种典型工况进行分析说明。 状态1(Q进 图4 系统循环流量曲线 图5 正常打钻流量曲线 状态7(Q进有流量,Q出为零或很小)为起钻时的典型状态,此时的流量曲线如图6所示。下钻过程需要补充钻井液,而且钻柱起出过程中必然导致出口流量减少,所以此时进口流量大于出口流量属于正常。但是当ΔQ大于3柱钻杆体积或Q进与Q出微分符号相反时,系统立即弹出报警界面,说明存在事故风险,系统判定为井漏。人为分析可能由抽吸导致溢流发生的可能性较大。 图6 起钻补泥浆时的流量曲线 基于钻井液流量、密度及液位等参数研制了多参数控制的钻井事故监测预警系统,以分布时间段的流量差为基础建立数学模型,结合现场实际工况,开发了钻井事故监测预警系统软件,能够对钻井施工现场的各种复杂状态做出科学合理的判断。通过在大庆油田南254-平335井的现场试验,验证了预警系统的工作稳定性和事故监测预警的准确性。 [1] 马吉巍.油井防喷器监测、数据保存与报警系统[D].成都:电子科技大学,2008. [2] Wu P T.Kick Warning System Using High Frequency Fluid Mode in a Borehole[P].US:US7334651,2008-02-26. [3] 成宝芝,郭险峰,陈春雨,等.基于嵌入式技术的油井无线远程监测系统设计[J].化工自动化及仪表,2010,37(4):73~76. [4] 戴永寿,岳炜杰,孙伟峰,等.“三高”油气井早期溢流在线监测与预警系统[J].中国石油大学学报(自然科学版),2015,39(3):188~194. [5] 李萍.基于多CPU的油井作业监测系统的设计与实现[J].化工自动化及仪表,2010,37(2):44~47. [6] 陈平,马天寿.深水钻井溢流早期监测技术研究现状[J].石油学报,2014,35(3):602~612. [7] 吴佳欢,潘峰,吴刚.油田工业多相流量计技术适用性分析[J].化工自动化及仪表,2016,43(4):341~346. [8] 张鸿飞.变频超声波液位开关在丁辛醇储罐中的应用[J].石油化工自动化,2016,52(4): 60~62. [9] 路宽,石成江,柏宜群.油井原油计量装置的静态标定及计量精度分析研究[J].化工机械,2013,40(5):589~592. [10] 冯光通.气井钻井溢流早期监测技术[J].广西大学学报(自然科学版),2016,41(1):291~300. [11] 赵闯.油井生产监测系统的研发与应用[D].北京:中国石油大学(华东),2013. (Continued from Page 623) (1.CollegeofElectricalEngineeringandInformation,NortheastPetroleumUniversity; 2.PlanningandDesignInstituteofNo.2OilProductionPlant,DaqingOilfieldCo.,Ltd.) AbstractRegarding the nonlinear stochastic time-delay system with mixed noises, the design of robustL1controller was studied. By adopting the integral inequality method, a delay-dependentL1criterion was constructed to derive sufficient conditions that guaranteeing the considered systems to be mean-square asymptotically bounded, and furthermore, the robustL1controller was designed to make closed-loop system’s mean-square asymptotic and the output value less than performance indexγof the givenL1. Based on the LMI technique, the robustL1control can be converted into a convex optimization problem and determined by solving a group of linear matrix inequalities. The numerical simulation certifies the effectiveness of this controller designed. Keywordsstochastic time-delay system, mixed noises, robustL1controller, nonlinearity DrillingAccidentMonitoringandEarly-warningSystemBasedonMulti-parameterControl BAI Li-lia, SUN Wen-fengb, GAO Jin-lana, LI Hong-yua, REN Shuanga Through taking flow, level and density of the drilling fluid as control parameters and having actual working condition of drilling site considered, a multi-parameter-based drilling accident monitoring and early-warning system was developed. The field test shows that, this system can be used for real-time monitoring of various conditions of the drilling site, including timely warning of both well leakage and overflow there. drilling accident monitoring and warning, multi-parameter TQ086.3 B 1000-3932(2017)07-0643-05 2017-01-03, 2017-04-01) 东北石油大学青年基金项目(NEPUQN2014-03);“十三五”国家科技重大专项(2016ZX05020-002)。 白丽丽(1981-),讲师,从事油气钻采自动化技术的研究,baili.81@163.com。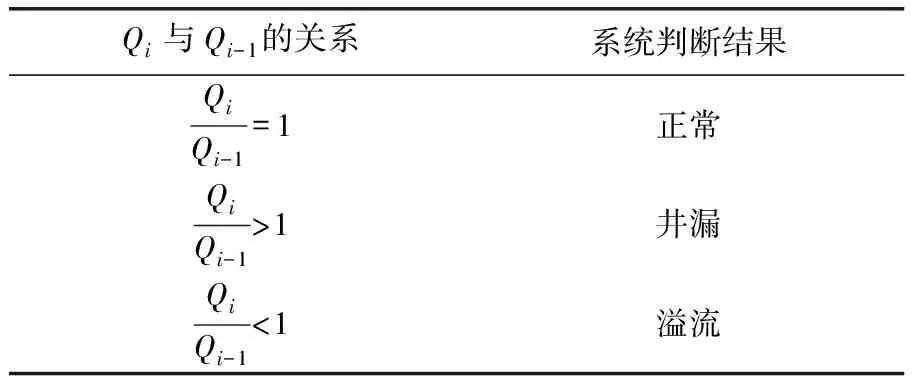
4 现场试验
5 结束语
( a.CollegeofElectricalEngineeringandInformation; b.CollegeofPetroleumEngineering,NortheastPetroleumUniversity)
猜你喜欢
民用飞机设计与研究(2020年4期)2021-01-21河南科学(2020年3期)2020-06-02金属矿山(2020年4期)2020-05-28钻井液与完井液(2019年4期)2019-10-10钻井液与完井液(2019年4期)2019-10-10电子制作(2019年11期)2019-07-04河北渔业(2019年3期)2019-03-22钻井液与完井液(2018年5期)2018-02-13中国交通信息化(2017年12期)2017-06-06西南石油大学学报(自然科学版)(2016年2期)2016-12-01