基于LabVIEW多效逆流蒸发工艺液位控制的研究
2017-11-01 05:42:40李菊张雷
化工自动化及仪表 2017年7期
李 菊 张 雷
(西南石油大学油气藏地质及开发工程国家重点实验室)
基于LabVIEW多效逆流蒸发工艺液位控制的研究
李 菊 张 雷
(西南石油大学油气藏地质及开发工程国家重点实验室)
针对多效逆流蒸发工艺中液位非线性、大惯性和时滞性的特点,将BP神经网络与增量式PID算法相结合,以LabVIEW为开发平台,实现了多效逆流蒸发过程液位控制的动态仿真。基于物料衡算和热量衡算,建立三效逆流蒸发液位的数学模型,通过液位仿真证明基于LabVIEW实现BP神经网络PID控制系统在多效蒸发液位控制中具有良好的自适应性和鲁棒性。
液位控制 BP神经网络PID控制 LabVIEW 多效蒸发
氯碱工业主要采用三效逆流强制循环工艺制备50%液碱,这种方法蒸发汽耗低、各效传热系数较高且成本低[1]。液位控制是生产NaOH常见的问题,但具有非线性、滞后及时变性等特性[2]。经典的PID控制算法具有直观、实现简单等优点,在很多领域被广泛使用,但用于非线性的液位控制中鲁棒性不强。BP神经网络方法具有信息分布式存储和自组织自学习功能,故处理多输入、非线性、耦合复杂的对象有广泛应用[3~5],如温度控制[6~9]、液位控制[10,11]和溶液浓度控制[12]。因此将BP神经网络结构与PID算法相结合引入多效蒸发液位控制,利用神经网络算法进行在线调整PID控制的3个参数,使控制效果达到最优。刘斌等研究了基于BP神经网络的连续搅拌反应釜PID自校正控制[13],结果表明BP神经网络PID超调量小,且控制器具有较小的输出量。
LabVIEW虚拟仪器是由美国NI公司提出的图形编程环境,用户可以在LabVIEW环境下编写应用程序,通过交互式的图形化前面板来控制系统,可实现数据采集、运动控制及监视等功能,并能直观地显示所得结果,减轻了编程工作量[14]。因此,LabVIEW不断地应用于化工过程控制中。宋锋和刘瑞歌基于LabVIEW实现了锅炉温度的控制[15],闫金银等基于 LabVIEW实现了带夹套反应釜温度的控制[16]。除此,LabVIEW还广泛地应用于化工蒸馏过程[17~23]、浸取过程[24]和吸附过程[25~27]。根据文献调研,基于LabVIEW的BP神经网络PID用于多效逆流蒸发液位控制的研究几乎没有,因此笔者基于LabVIEW设计了BP神经网络PID控制系统,通过对比传统PID和BP神经网络PID对蒸发液位的控制效果,证明了BP神经网络PID响应速度快且超调量小,是实现多效逆流蒸发液位控制的有效方法,故笔者将BP神经网络PID用于三效逆流蒸发液位的控制,使蒸发器液位控制在相应的理想液位。
1 数学模型
1.1 BP神经网络PID数学模型
BP神经网络PID控制由经典PID控制和BP神经网络组成,经典PID控制器直接对被控对象进行闭环控制,并且对Kp、Ki、Kd在线调整;神经网络根据系统的运行状态,调整PID参数达到性能指标最优化,使输出层对应的3个参数通过神经网络的自学习和加权系数调整达到最优[28]。增量式数字PID的控制算法如下:
u(k)=u(k-1)+Kp[e(k)-e(k-1)]+Kie(k)+
Kd[e(k)-2e(k-1)+e(k-2)]
(1)
采用三层BP神经网络结构,输入层为理想液位、实际液位、液位误差和常数1,并对输入样本进行归一化处理, BP神经网络PID控制结构如图1所示。
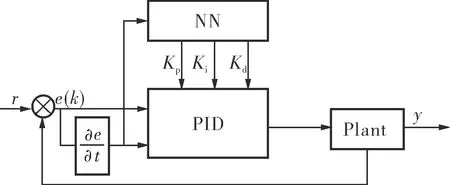
图1 BP神经网络PID控制结构
网络输入层的输入为:
Oj=x(j),j=1,2,…,M
(2)
网络隐含层的输入、输出为:
(3)
Oi(k)=f(neti(k)),i=1,2,…,Q
(4)
隐层神经元的活化函数取为正负对称的Sigmoid函数:
(5)
网络输出层的输入、输出为:
(6)
Ol(k)=g(netl(k)),l=1,2,3
(7)
O1(k)=Kp
O2(k)=Ki
(8)
O3(k)=Kd
输出层输出节点对应3个可调节的Kp、Ki、Kd,由于3个参数不能为负,所以输出层神经元的活化函数取非负的Sigmoid函数:

(9)
性能指标函数为:
(10)
网络输出层加权系数的学习算法:
Δvli(k)=aΔvli(k-1)+bδlOi(k)
(11)
(12)
隐含层加权系数的学习算法:
Δwij(k)=aΔwij(k-1)+bδiOj(k)
(13)

(14)
1.2 蒸发液位模型
1.2.1 物料衡算和热量衡算
为建立三效逆流蒸发工艺数学模型,主要的假设条件如下[29]:过程为稳定状态;忽略热损失;忽略蒸汽的引入和引出;溶液沸点进料。基于LabVIEW的三效逆流蒸发界面如图2所示,三效逆流原理如图3所示,三效逆流蒸发工艺中的设计参数如下:
原料浓度 32%
完成液产量 5×107kg
完成液浓度 50%
生蒸汽压力 800kPa
生蒸汽温度 170.44℃
第1效压力 200kPa
第1效二次蒸汽温度 120.240℃
第2效压力 50kPa
第2效二次蒸汽温度 81.339℃
第3效压力 10kPa
第3效二次蒸汽温度 45.799℃
工作时间 300×24h
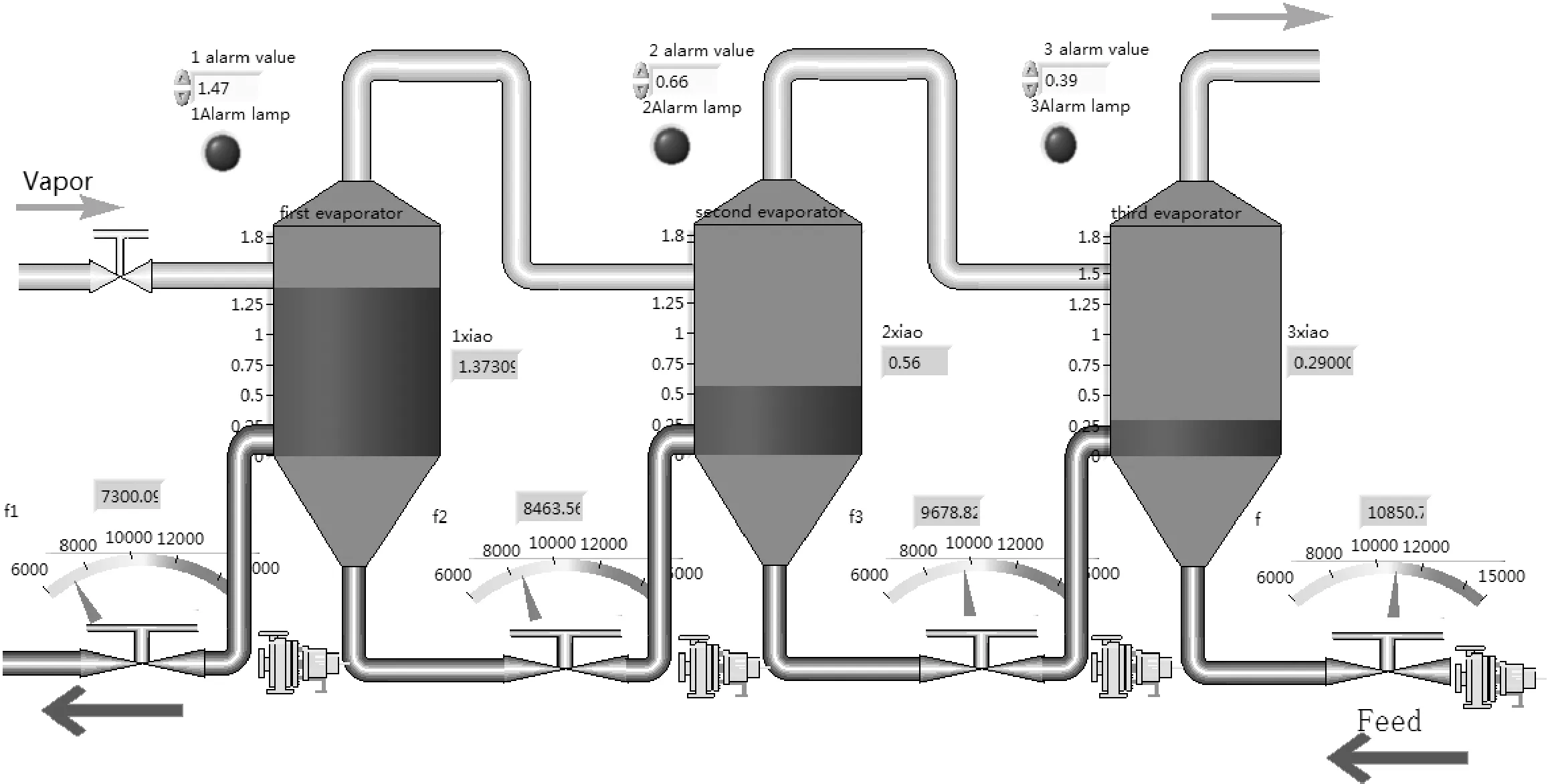
图2 基于LabVIEW三效逆流蒸发的界面
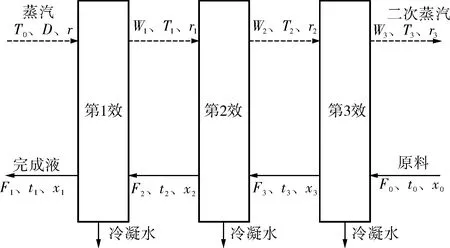
图3 三效逆流蒸发原理示意图
物料衡算热量衡算为:
(15)
(16)
式中Cpi——料液的比热容,kJ/(kg·℃),Cpi=4.187(1-xi)+1.31xi;
D——蒸汽量,kg/h;
F——原料流量,kg/h;
r0——生蒸汽的汽化潜热;
ri——各效蒸汽的汽化潜热,kJ/kg;
ti——各效料液温度,℃;
W——总的蒸发水量,kg/h;
Wi——各效蒸发水量,kg/h;
x0——原料液的浓度;
xi——各效出料液的浓度。
通过计算W1=0.140F,W2=0.112F和W3=0.108F。
1.2.2 液位模型
对于第3效蒸发器,液位模型如下[30]:

(17)
式中A——蒸发器面积,m2;
F——进料流量,kg/s;
F3——出料流量,kg/s,F3=K3u3,K3和u3分别为电磁阀放大系数和电磁阀的控制电压。
因此,有:
h3(t)=0.892F/A-K3u3/A+h3(t-1)
(18)
h2(t)=F3/A-0.112F/A-K2u2/A+h2(t-1)
(19)
h1(t)=F2/A-0.140F/A-K1u1/A+h1(t-1)
(20)
2 仿真结果与讨论
2.1 BP神经网络PID算法中参数对控制的影响分析
根据式(11)和式(13)可知,加权系数a和b影响阈值w和v,从而影响BP神经网络PID的控制效果,分别选取5个不同的系数a和b,响应曲线及其局部图分别如图4所示。图4a随着参数值a的增大,BP神经网络PID的控制达到理想液位所需的时间逐渐变长,但振动幅度相对减小。图4b随着参数b的增大,除了b=100,其他控制效果基本没明显变化。因此,加权系数a是影响BP神经网络PID控制效果的主要因素。
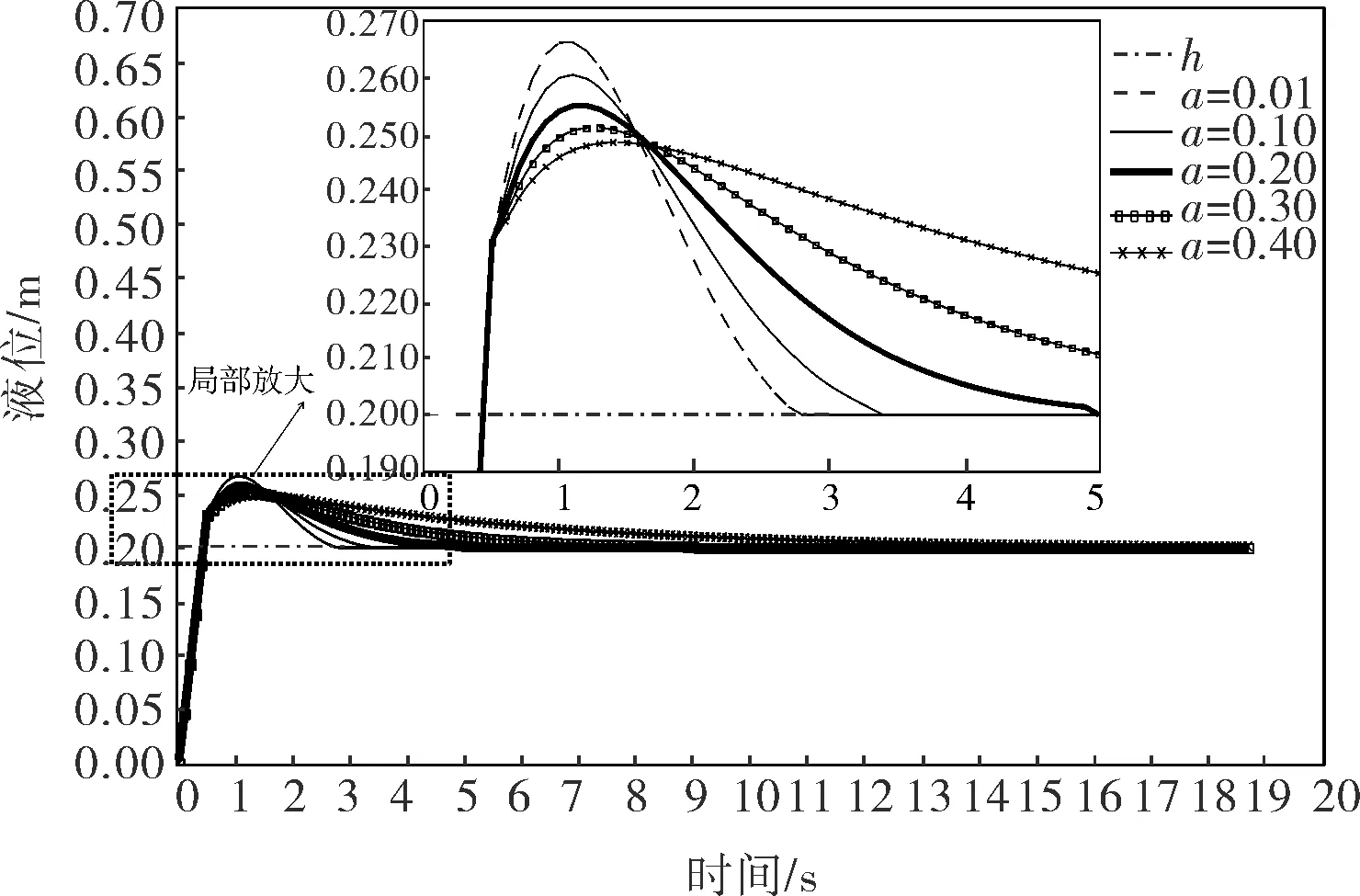
a. 参数a
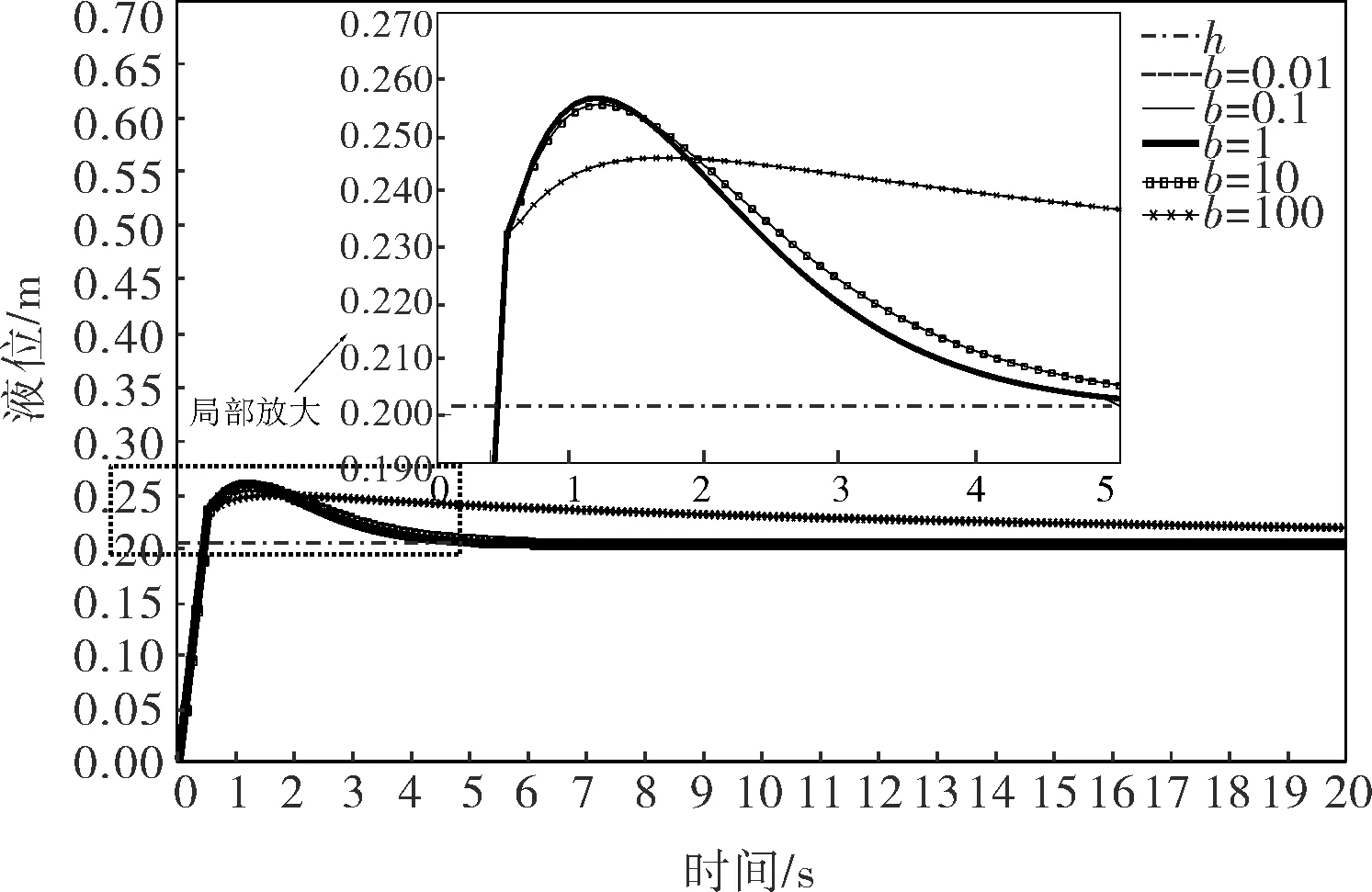
b. 参数b
2.2 BP神经网络PID与传统PID比较
以第3效液位模型为例,理想液位取0.5,基于LabVIEW的传统PID和BP神经网络PID控制的响应曲线如图5所示。可以看出,BP神经网络PID控制达到理想液位所需的时间短,即t=3s左右,液位达到理想液位。传统PID控制效果比BP神经网络PID控制效果差,达到理想液位所需时间更长,液位曲线振荡次数多、幅度大。因此,BP神经网络PID控制器辨识精度高、响应速度快、超调量小,是实现多效逆流蒸发液位控制的有效方法。
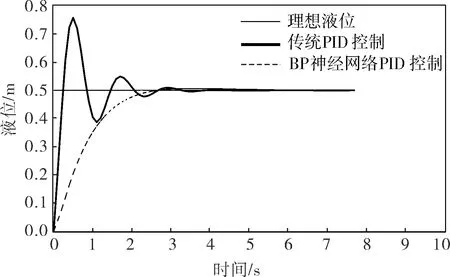
图5 BP神经网络PID和传统PID液位响应曲线
2.3 BP神经网络PID对三效逆流蒸发液位控制的仿真分析
蒸发室允许的最低液位为:
L=(p2-p1)/(ρig)
式中g——重力加速度,取9.81m/s2;
p1——蒸发室内蒸汽压力,kPa;
p2——p1压力下蒸汽温度t+2℃对应的压力,kPa;
ρi——溶液的平均密度,kg/m3。
代入数据得三效最低液位分别为1.17、0.36、0.09m,三效理想液位分别为1.37、0.56、0.29m。
3个蒸发器的液位曲线如图6所示。从曲线可知,第2效和第1效蒸发器的液位具有滞后性,当t=0.7s时,第3效蒸发器液位达到理想值,第2效蒸发器的液位开始上升;当t=2.2s时,第2效蒸发器液位达到理想值,此时第1效蒸发器的液位开始上升。当3个蒸发器液位逐渐达到理想液位值时,误差逐渐趋于0,液位随时间的变化曲线逐渐趋于恒定。
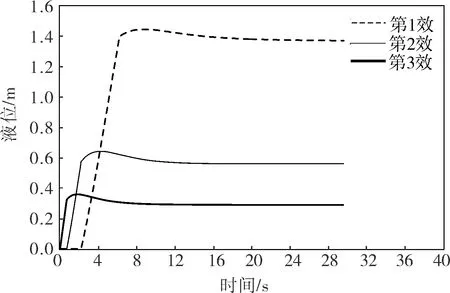
图6 3个蒸发器的液位随时间的变化曲线
三效蒸发器液位曲线如图7a~c。三效蒸发器到达理想液位所需的时间分别为20、14、12s,即第3效蒸发器最先达到理想液位值,第2效、第1效依次逐渐达到稳定。三效蒸发器的最高液位值分别为1.448、0.623、0.359m,分别高于理想液位的5.69%、 11.25%、23.79%,即第3效液位曲线振幅大于第2效液位曲线振幅,第1效液位曲线振幅最小。除此,根据液位曲线可知,3个蒸发器的液位低于报警液位,故BP神经网络PID控制对三效逆流蒸发液位具有很好的控制效果。图8为PID 3个参数Kp、Ki和Kd随时间的变化曲线,第1效和第2效的3个参数通过调整在很短时间内达到稳定值,而第3效的3个参数通过调整达到稳定值所需时间较长,且曲线变化幅度大。

图7 蒸发器液位曲线
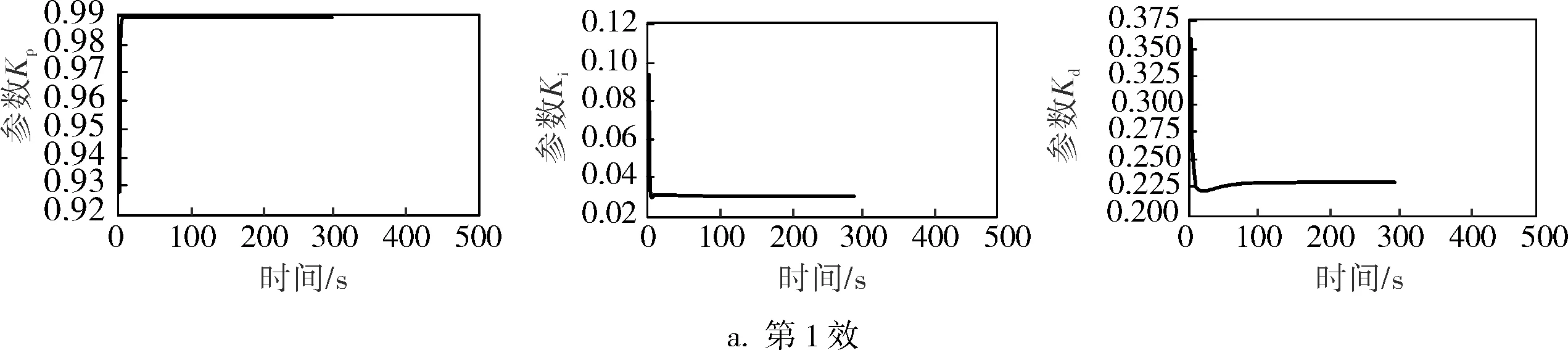
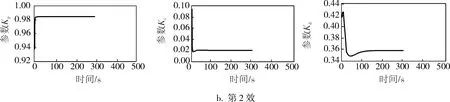
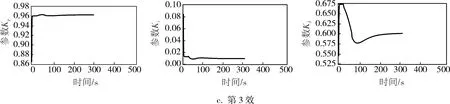
图8 PID 3个参数 Kp、Ki和Kd的变化曲线
3 结束语
对比了传统PID和BP神经网络PID对蒸发液位的控制效果,仿真结果表明BP神经网络PID控制的蒸发液位能在短时间内达到理想液位,并且液位振动幅度小。因此,在多效蒸发液位的控制中BP神经网络PID控制效果优于传统PID控制效果。通过基于LabVIEW对BP神经网络PID在三效逆流蒸发液位的控制仿真结果可以看出,第2效和第1效蒸发器的液位控制具有滞后性,误差曲线显示第3效蒸发器的液位最先达到理想液位,但其液位变化幅度最大,其控制液位超过理想液位高达23.79%。通过三效蒸发器的液位曲线可以看出,3个蒸发器的液位均低于其报警液位。因此,BP神经网络PID控制对三效逆流蒸发液位具有很好的控制效果。
[1] 张守特. 三效逆流降膜蒸发工艺生产50%烧碱的探讨[J]. 天津化工, 2010, 24(6): 45~47.
[2] Al-Mutaz I S, Wazeer I.Comparative Performance Evaluation of Conventional Multi-effect Evaporation Desalination Processes[J]. Applied Thermal Engineering, 2014, 73(1): 1194~1203.
[3] 匡芬芳. 基于LabVIEW的液位神经网络PID控制系统[J]. 微计算机信息, 2010 ,26(19): 60~62.
[4] He J, Yang W, Wang J. Fast HEVC Coding Unit Decision Based on BP-Neural Network[J]. International Journal of Grid and Distributed Computing, 2015, 8(4): 289~300.
[5] Kang J, Meng W, Abraham A, et al. An Adaptive PID Neural Network for Complex Nonlinear System Control[J]. Neurocomputing, 2014, 135(8): 79~85.
[6] 于海南,郑荣进,步文月,等. 基于BP神经网络PID控制器在水产温室温度控制中的应用[J].安徽农业科学,2016, (3): 312~315.
[7] 刘斌,孙久强,崔洋洋,等.基于BP神经网络的连续搅拌反应釜PID自校正控制[J].化工自动化及仪表,2015,42(8): 860~862 ,934.
[8] 张根宝,谢晓静,刘晓勇.基于L-BFGS算法BP神经网络在温度补偿中的应用[J].仪表技术与传感器,2016,(4):98~100.
[9] 王泽欢,吴学华,李文涛,等. 神经网络算法在反应釜温度控制中的应用[J].中国仪器仪表,2016,(8):60~62.
[10] 朱丽娟.神经网络在水箱液位控制中的应用及Matlab实现[J]. 唐山师范学院学报,2015,(5):35~38.
[11] 邓肖,刘宗玲,杨朝,等. 改进的PID神经网络在黑液液位控制中的应用[J].中国造纸学报,2014,29(2):58~62.
[12] 许令峰,郭辉,吴卫东,等. 基于BP神经网络的电解液浓度预测系统[J].化工自动化及仪表, 2013, 40(12): 1458~1461.
[13] 刘斌,孙久强,崔洋洋,等.基于BP神经网络的连续搅拌反应釜PID自校正控制[J].化工自动化及仪表,2015,42(8):860~862,934.
[14] 杨智,陈雨琴. 基于LabVIEW的PID自整定控制器设计[J].化工自动化及仪表,2015,42(11):1188~1191.
[15] 宋锋,刘瑞歌. 基于LabVIEW的锅炉温度过程控制系统仿真[J].化工自动化及仪表, 2015,42 (2): 183~185.
[16] 闫金银,王亚刚,孙会兵. 带夹套的反应釜温度控制器及LabVIEW实现[J].化工自动化及仪表, 2011,38(11): 1291~1293.
[17] Barroso J, Borges J, Oliveira P, et al. Nonlinear Modeling of a Real Pilot Scale Continuous Distillation Process[J].Computer Aided Chemical Engineering, 2009, 28: 1733~1738.
[18] Chambel A J S, Pinheiro C I C, Borges J, et al. Methodologies for Input-Output Data Exchange between LabVIEW and MATLAB/Simulink Software for Real Time Control of a Pilot Scale Distillation Process[J]. Computer Aided Chemical Engineering, 2011, 29: 708~712.
[19] De Canete J F, del Saz-Orozco P, Gonzalez S, et al. Dual Composition Control and Soft Estimation for a Pilot Distillation Column Using a Neurogenetic Design[J]. Computers & Chemical Engineering, 2012, 40: 157~170.
[20] De Canete J F, del Saz-Orozco P, García-Moral I, et al. Indirect Adaptive Structure for Multivariable Neural Identification and Control of a Pilot Distillation Plant[J]. Applied Soft Computing, 2012, 12(9): 2728~2739.
[21] 杨亚茹,刘登峰,徐国强,等. 基于LabVIEW的白酒自动化装甑蒸馏监控系统[J]. 酿酒科技, 2016,(5): 92~95.
[22] 李冬辉,许弋慧.基于模糊控制的蒸馏管路压力系统研究[J]. 仪表技术与传感器, 2014, (3): 49~51.
[23] 李乐斌,赵智,孙尔雁,等. 基于LabVIEW的低温与真空度测量系统设计[J]. 化工自动化及仪表,2016,43(11):1166~1168,1226.
[24] Song J, Gao L, Lin J Q, et al. Kinetics and Modeling of Chemical Leaching of Sphalerite Concentrate Using Ferric Iron in a Redox-controlled Reactor[J]. Chinese Journal of Chemical Engineering, 2013, 21(8): 933~936.
[25] Cheng H H, Li W B, Chen W, et al. Development of Hydrogen Absorption Edesorption Experimental Test Bench for Hydrogen Storage Material[J]. Int J Hydrogen Energy, 2014, 39(25):13596~13602.
[26] Cheng H H, Deng X X, Li S L, et al. Design of PC Based High Pressure Hydrogen Absorption/Desorption Apparatus[J]. International Journal of Hydrogen Energy, 2007, 32(14): 3046~3053.
[27] Vashpanov Y, Choo H, Kim D S. Dynamic Control of Adsorption Sensitivity for Photo-EMF-based Ammonia Gas Sensors Using a Wireless Network[J]. Sensors, 2011, 11(11): 10930~10939.
[28] Kang J, Meng W, Abraham A, et al. An Adaptive PID Neural Network for Complex Nonlinear System Control[J]. Neurocomputing, 2014, 135: 79~85.
[29] Al-Mutaz I S, Wazeer I. Comparative Performance Evaluation of Conventional Multi-effect Evaporation Desalination Processes[J]. Applied Thermal Engineering, 2014, 73(1): 1194~1203.
[30] 匡芬芳. 基于LabVIEW的神经网络PID控制算法在液位控制系统中的仿真研究[D].长沙: 中南大学, 2009.
TheLiquidLevelControlofMulti-effectCountercurrentEvaporationProcessBasedonLabVIEW
LI Ju, ZHANG Lei
(StateKeyLaboratoryofOilandGasReservoirGeologyandExploitation,SouthwestPetroleumUniversity)
Aiming at liquid level control’s non-linearity, large delay and time lag of the multi-effect countercurrent evaporation process, having back propagation neural network(BPNN) combined with incremental PID
TH865
A
1000-3932(2017)07-0667-07
2017-01-05,
2017-05-17)
(Continued on Page 692)
李菊(1990-),硕士研究生,从事化工过程控制的研究。
联系人张雷(1967-),教授,从事理论与计算机化学、应用化学、化学工程与技术等的研究,zgc166929@sohu.com。
猜你喜欢
基层中医药(2021年11期)2021-03-26 18:18:41
小学生作文(低年级适用)(2019年4期)2019-04-29 09:14:14
测控技术(2018年9期)2018-11-25 07:45:00
石油化工自动化(2018年5期)2018-11-14 02:34:30
散文诗(2017年18期)2018-01-31 02:43:49
汽车维护与修理(2015年2期)2015-02-28 12:15:41
天然产物研究与开发(2014年8期)2014-04-27 14:16:29
机电信息(2014年20期)2014-02-27 15:53:23
机电信息(2014年17期)2014-02-27 15:53:00
机电信息(2014年5期)2014-02-27 15:51:47