
一种踝关节三维运动空间的量化算法①
2017-10-31 06:15:46张云超肖金壮王洪瑞
中国康复理论与实践 2017年10期
张云超,肖金壮,王洪瑞
·康复工程·
一种踝关节三维运动空间的量化算法①
张云超,肖金壮,王洪瑞
目的 结合踝关节在各方向上运动之间的约束关系,对其三维转动角度进行积分,得到三维运动空间的大小,用于更加准确全面地量化其灵活度和康复程度。方法 选取25例大学生志愿者,其中无踝关节损伤的健康者20例,近期有过踝关节损伤的患者5例。使用运动捕捉系统实时记录被测者脚上标记点的三维坐标。利用三角函数将这些坐标转化为转动角度并进行处理,通过使用多项式拟合,得到踝关节在各个方向上最大转动角度随跖屈和背屈角度变化的方程。对拟合得到的方程进行积分,得到踝关节三维运动空间的大小。结果 健康人群踝关节的三维运动空间为41.256,个体间差距小于10%。患者患侧三维运动空间的大小为33.163,由于康复程度的不同,个体间差距小于15%。两组之间存在显著性差异(t=8.804,P〈0.01)。在同一跖屈和背屈角度下,内翻的最大转动角度比外翻大,内旋的最大转动角度比外旋大。结论 通过此算法能更准确地量化踝关节三维运动空间的大小,实现对踝关节灵活度和康复程度更全面的评估。
踝关节;康复评定;三维运动空间;多项式拟合;积分;运动捕捉
1 研究背景
踝关节的受损越来越常见,它的恢复周期较长,恢复效果常欠理想,影响人类日常行为[1-3]。随着科技的发展,踝关节康复机器人的种类越来越多,康复训练的方式也多种多样[4-7]。评价其康复程度的方法一般有两种:一种是根据医生的经验进行判断,这种评价方法依赖于医生的个人经验,主观性强且缺乏统一的标准;另一种是通过测量关节活动度进行判断。关节活动度指踝关节在各方向上运动时一维的转动范围。虽然它考虑到用准确数值表达足踝的灵活度,但并没有考虑各方向上运动的综合表达。因此,这两种评估踝关节康复程度的方法都存在不足。
足踝运动是一个立体空间内的三维运动,而且它在各方向上的运动都相互影响[8-9]。为了找到一个数值来描述踝关节在三维空间内运动空间的大小,既需要考虑踝关节在各个方向上的转动范围又要考虑踝关节在各个方向上转动之间的影响[10-11]。本研究的目的是通过一种算法量化踝关节三维运动空间的大小,并用来评价踝关节的灵活性和康复程度[12],为建立更加合理的踝关节康复标准提供准确的数据和方法,也为踝关节康复训练提供反馈指导;同时为踝关节康复训练仪器以及此方面假肢机器人提供更加完善的数据,使其运动轨迹或运动空间更加接近人体,以提高设备的舒适性[13-15]。
2 三维运动空间的计算原理
人体踝关节是由胫骨的下关节面、内踝关节面和腓骨的外踝关节面共同形成的叉状关节窝,以及距骨滑车的关节头构成[16-17]。足可绕此关节做屈伸运动,足向下为跖屈,向上为背屈。由于关节窝和关节头之间存在缝隙,所以当足跖屈或背屈时,足还可以做内旋、外旋、内翻和外翻运动[18]。踝关节三维运动空间的大小应为三维转动角度的一种积分。由于内旋、外旋、内翻和外翻转动的角度都与跖屈和背屈的转动角度有关,而且这种关系容易被量化,因此选定跖屈和背屈的转动角度为自变量,设定跖屈时角度为负值,背屈时角度为正值。内旋、外旋、内翻和外翻的最大转动角度则被设定为因变量。通过角度测量设备可以获得每个跖屈或背屈角度所对应的内旋、外旋、内翻和外翻的最大转动角度。再利用数据拟合的方法得到它们的最大转动角度随跖屈和背屈转动角度变化的函数。
因为足踝运动空间的大小是通过结合各方向上运动的三维转动角度进行积分得到的,所以本文只需要考虑它在各个方向上的转动角度以及它们之间的相互约束关系,而不需要考虑它的形状。为了更加形象地把足踝运动空间表达和量化出来,本文把踝关节的转动部分(距骨滑车)看成一个半径为1的球体。如图1所示,当踝关节做跖屈和背屈运动时,该球绕X轴旋转;当踝关节做内旋和外旋运动时,该球绕Z轴旋转;当踝关节做内翻和外翻运动时,该球绕Y轴旋转。本研究在球的上半部分选择一个半圆作为基线(如图1中的黑色实线),同时,这条基线(半圆)在Y轴和Z轴构成的平面上。在每一个跖屈或背屈角度时,踝关节分别做最大内旋、外旋、内翻和外翻运动后基线所扫过的空间构成了一个不规则球面,而这个不规则球面所对应的那部分球体体积就可以代表踝关节在这个跖屈或背屈角度下,通过做四种运动所能达到的空间,称为子空间。由于本研究规定球的半径为1,所以得到的该子空间大小完全取决于某一个跖屈或背屈角度下内旋、外旋、内翻和外翻转动范围的大小以及它们之间的约束关系。再根据前面拟合的内旋、外旋、内翻和外翻的转动范围随跖屈和背屈的角度变化的方程,便可以得到子空间随跖屈和背屈角度变化的方程。最后对这个子空间进行关于跖屈和背屈的积分得到踝关节三维运动空间的大小。
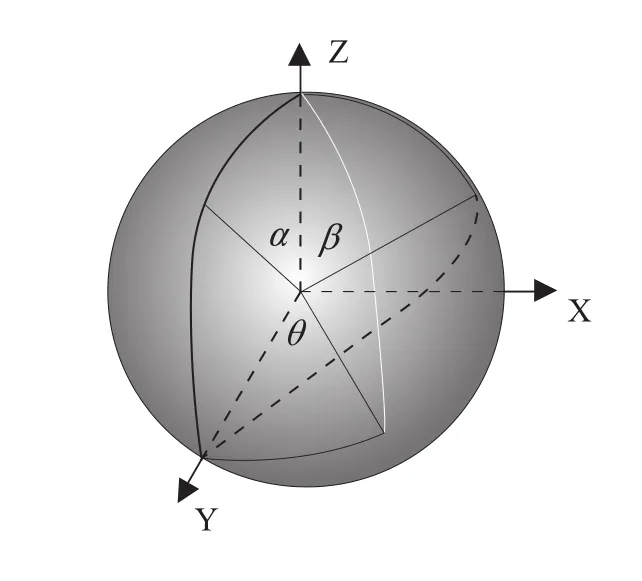
图1 转动的球体
其计算过程如下。
首先,假设内旋、外旋、内翻和外翻的最大转动角度随跖屈和背屈转动角度变化的函数分别为 f1(x)、f2(x)、 f3(x)、 f4(x)。
接下来计算每一个跖屈或背屈角度所对应的子空间的大小。只要自变量(跖屈和背屈的转动角度)确定,根据以上四个函数就可以确定相对应的内旋、外旋、内翻和外翻的最大转动角度,分别记为y1、y2、y3、y4。由于最大外翻与外旋、外翻与内旋、内翻和外旋、内翻与内旋之间都分别存在重合部分,所以在计算某个跖屈或背屈角度所对应的子空间时不能直接使用公式(1)进行计算。应该分别求出外旋能达到而外翻不能达到的部分子空间v1;外旋能达到而内翻不能达到的部分子空间v2;内旋能达到而外翻不能达到的部分子空间v3;内旋能达到而内翻不能达到的部分子空间v4。然后通过公式(2)计算出通过内翻和外翻能达到的部分子空间v5。进而在某个跖屈或背屈角度下的运动子空间的大小可以通过公式(3)计算得到。
以计算外旋能达到而外翻不能达到的部分子空间为例。如图1所示,为了便于分析,假设球是相对静止而基线是转动的。当踝关节外翻时基线扫过球面旋转到图中的黑色虚线位置。当踝关节外旋时基线扫过球面旋转到图1中的白色实线位置。其中α作为一个辅助角,以便于几何分析,范围为[0,π/2]; β为踝关节外翻的最大转动角度,即为y4;θ为踝关节外旋的转动角度,其范围为[0,y2]。φ表示为球面上的任意一点与圆心构成的直线与Z轴的夹角。
基线的初始方程为:

踝关节最大外翻时,基线上点的坐标为:

结合公式(5)、(6)、(7)可得:

对公式(5)、(6)、(7)、(8)、(9)、(10)推导可得:

所以积分变量θ、φ、r的取值范围分别为:
故外旋能达到而外翻不能达到的部分子空间的大小v1为:

因此,v1为自变量(跖屈和背屈的转动角度)的变化函数。
同理,也可以得到外旋能达到而内翻不能达到的部分子空间的大小v2。公式(11)中的 β值是踝关节内翻的最大转动角度,即为y3。θ为踝关节外旋的转动角度,其范围为[0,y2]。

在计算内旋能达到而外翻不能达到的部分子空间的大小v3时,公式(11)中的β值是踝关节外翻的最大转动角度,即为y4。θ为踝关节内旋的转动角度,其范围为[0,y1]。

在计算内旋能达到而内翻不能达到的部分子空间的大小v4时,公式(11)中的β值是踝关节内翻的最大转动角度,即为y3。θ为踝关节内旋的转动角度,其范围为[0,y1]。

因此每个跖屈或背屈角度所对应的子空间大小为:

所以,v也是关于自变量(跖屈和背屈的转动角度)的变化函数。最后通过对v进行关于跖屈和背屈的积分就得到足踝三维运动空间的大小v3D:(xmin表示跖屈的最大角度,其值为负数;xmax表示背屈的最大角度,其值为正数)

3 算法的应用
3.1 实验器材
本研究采用光学式运动捕捉系统(NaturePoint公司)[19-20]。其基本原理是通过使用12个高分辨率红外摄像机跟踪表面涂有一层反光物质的小球,这些小球被称为标记点。在系统标定后,相机连续拍摄表演者的动作,并将图像序列保存下来,然后再进行分析和处理,识别其中的标记点,并计算其在每一瞬间的空间位置,进而得到其运动轨迹。这种光学式运动捕捉的优点是采样速率和精度较高;使用很方便;标记点的数量可根据实际情况任意添加;同时无电缆、机械装置的限制,表演者可以自由地表演。
3.2 试验方法
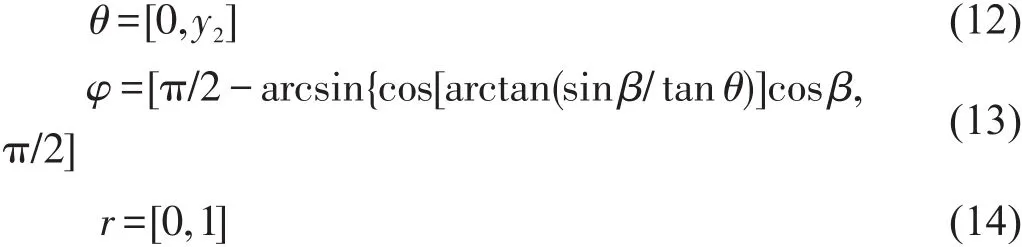
运动捕捉系统不能直接得到踝关节在各个方向上转动的角度,但能得到每个标记点在每一瞬间的空间位置。所以可以利用向量和三角函数将捕捉到的标记点的坐标值转化为踝关节的转动角度。此实验使用了三个标记点,分别记为mark1、mark2、mark3(图2)。
图2 标记点贴装位置
由于运动捕捉系统是通过标记点反光来得到它的三维坐标。在测量过程中,为了避免某个标记点可能被遮挡,以及脚的凹凸不平和表面皮肤的移动给测量结果带来的影响,本实验用绷带在人的脚底水平固定一个薄的长方形硬板(40×20 cm),将三个标记点按照图2所描述的位置贴装在硬板上,贴装完成后mark1与mark2构成的直线与mark2与mark3构成的直线是垂直的。
为了避免测量过程中小腿随脚转动对测量数据带来影响,本实验选用了一个带有可调节铁架的医用床(图3a),在测量过程中用绷带把小腿固定在铁架上,这样就能避免小腿随脚转动。而且可以根据被测者的身高调整铁架,避免铁架对数据测量带来影响。
为了测得足踝在各个方向上的旋转角度,需要有参考零点。如图3b所示,将人的小腿垂直于水平地面,脚底所在的平面和小腿轴线垂直,脚趾指向正前方的状态定义为初始状态,此时认为足踝各方向的旋转角度都为0°。由于小腿呈不规则圆锥状,所以当小腿被固定在铁架上的时候,小腿的轴线难以绝对垂直于地面。但在初始状态时要求脚底所在的平面垂直于小腿轴线,因此平行于脚底所在的平面固定的薄硬板与水平地面并非绝对平行,存在一定的初始误差。此误差大小与被测者的腿型和固定薄硬板时的精确度有关。经过统计分析,在初始状态下,不管相对于哪个转动方向,硬板与水平地面的夹角都小于4°。所以在后续的数据处理过程中,本研究将采集过程得到的角度减去在初始位置时的角度以消除初始误差带来的影响。
开始测量前,要求被测者坐在床上,将带有标记点的硬板固定在脚底,同时把小腿固定在铁架上,让受测者的脚保持在初始状态。开始测量后,要求被测者在改变跖屈或者背屈角度的时候分别做最大内旋、外旋、内翻和外翻运动,尽量得到每个跖屈或背屈角度所对应的最大内旋转动角度、最大外旋转动角度、最大内翻转动角度和最大外翻转动角度。如图3c所示,当测量右脚数据时候,人坐在铁架的右侧,这样当小腿束缚在铁架上时,踝关节更容易处于初始状态,使测量数据更加精确。同理,当测量左脚数据时让被测者坐在铁架的左侧,如图3d所示。每个人两只脚都要被测量。

图3 测量过程
本实验选取25例大学生志愿者。一组为20例无踝关节损伤的健康者,另一组为5例近期受过踝关节损伤的患者。其被测者的信息见表1。
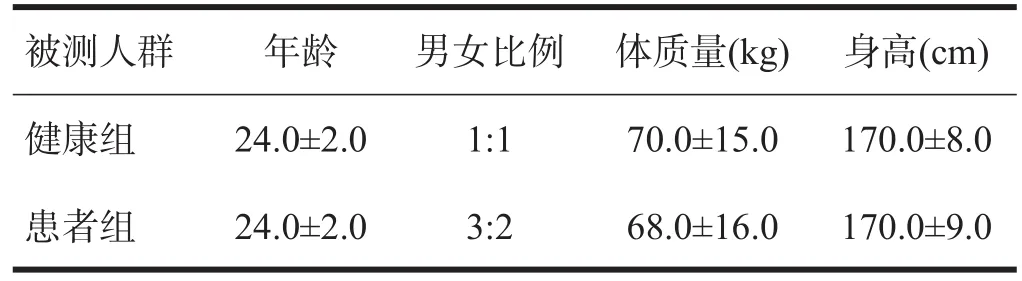
表1 两组被测者的统计信息
3.3 数据的处理
数据测量完毕以后,得到三个标记点的三维坐标序列,再利用向量和三角函数将这些坐标转化为三维的转动角度。这样就得到了在每个采样时刻跖屈或背屈的转动角度、内旋或外旋的转动角度以及内翻或外翻的转动角度。然后用每个采集时刻得到的角度减去初始位置时的角度以消除初始误差的影响。
最后筛选出每个跖屈和背屈转动的角度所对应的内旋、外旋、内翻和外翻转动的最大角度。因此得到每只脚在不同的跖屈和背屈角度下所对应的内旋和外旋转动范围以及内翻和外翻转动范围。
然后,将每个健康被测者的左脚和右脚的数据按照踝关节的旋转方向整理在一起,这样每个跖屈和背屈的转动角度会对应两个内旋和两个外旋的转动范围以及两个内翻和两个外翻的转动范围,求取平均值后得到每个被测健康者在不同的跖屈或背屈转动角度下的内旋、外旋、内翻和外翻的平均转动范围。
接下来,将所有健康被测者的数据按照踝关节的旋转方向整理在一起,同时求出所有被测健康者在不同的跖屈或背屈转动角度下的内旋、外旋、内翻和外翻的平均转动范围。
3.4 数据的拟合
由于动作捕捉设备采集的数据是离散的,而足踝的内旋、外旋、内翻和外翻的最大转动角度随跖屈或背屈转动角度的变化应该是一个连续的函数,所以需要对整理的数据进行拟合得到相对应的函数方程。其中自变量是跖屈和背屈的转动角度,因变量分别是内旋、外旋、内翻和外翻的最大转动角度。本研究采用了多项式拟合,这种方法可以得到准确的拟合方程[21-23]。经过对全部健康被测者的平均数据进行拟合,得到能代表健康人群内旋、外旋、内翻和外翻的最大转动角度随跖屈和背屈的转动角度变化的方程。
内旋的最大转动角度随跖屈和背屈的转动角度变化的方程为:

外旋的最大转动角度随跖屈和背屈的转动角度变化的方程为:

内翻的最大转动角度随跖屈和背屈的转动角度变化的方程为:

外翻的最大转动角度随跖屈和背屈的转动角度变化的方程为:

3.5 运动空间大小的计算
使用公式(20),计算得到代表健康人群踝关节的三维运动空间大小为41.256,5例踝关节近期受过伤的患者患侧的综合的三维运动空间的大小为33.163。本研究也计算出每个健康被测者踝关节三维运动空间的大小以及每个患者患侧的踝关节三维运动空间的大小,同时使用SPSS 19.0统计软件对两组数据进行t检验。
结果显示,每个健康被测者的踝关节运动空间的大小和总体的运动空间大小相差不大,差距不超过10%。而患者患侧的踝关节运动空间明显小于健康组(P〈0.01)。见表2。又由于踝关节的三维运动空间包含了各方向上的转动范围以及它们之间的约束关系。因此使用本文的算法得到的踝关节运动空间可更准确地评价踝关节的康复程度。
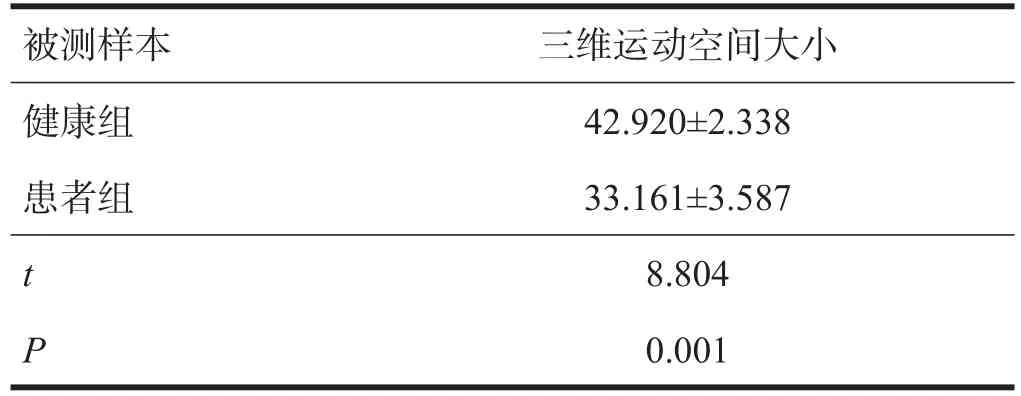
表2 健康组和患者组足踝三维运动空间比较
4 讨论
从踝关节的解剖结构上看,由于胫腓骨下端的关节窝和距骨滑车都是前部较宽后部较窄,背屈时,较宽的滑车前部嵌入关节窝内,所以当足踝背屈时其内旋、外旋、内翻和外翻的转动范围下降的比较快,此时关节较稳定。但跖屈时,由于较窄的滑车后部进入关节窝内,此时其内旋、外旋、内翻和外翻的转动范围下降的比较慢,但此时关节不够稳定,故踝关节扭伤多发生在跖屈情况下。如图4所示,实线和虚线分别表示内翻和外翻的转动范围随跖屈和背屈转动角度的变化。如图5所示,实线和虚线分别表示内旋和外旋的转动范围随跖屈和背屈转动角度的变化。这些曲线的变化规律与对解剖结构分析得到的规律是一致的。同时可以清晰地看出在同一个跖屈或背屈角度下,其内翻的运动范围比外翻大,内旋的运动范围比外旋大[24-25]。这证明了此次试验的准确性和方法的可靠性。
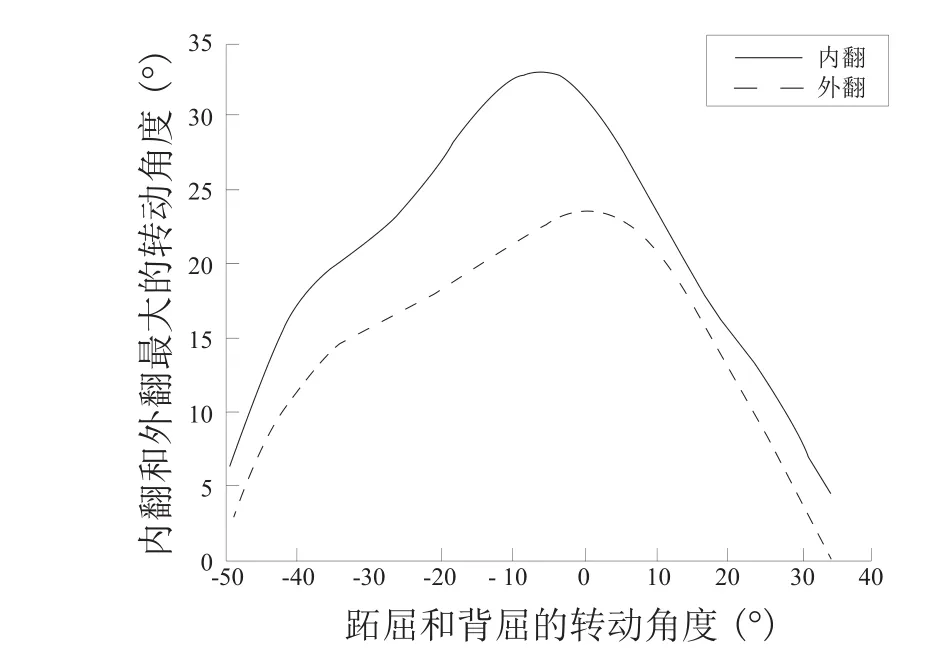
图4 内翻和外翻转动范围的变化
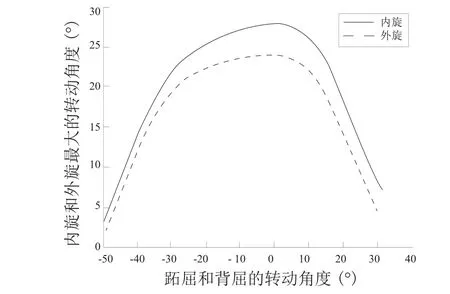
图5 内旋和外旋转动范围的变化
每个健康被测者的踝关节运动空间的大小不一样。这可能由于每个人身体状况或者所从事职业的不同造成的。研究人员可以使用此方法对不同的人群设定不同的康复标准。而本研究把所有健康被测者的数据综合起来求出的踝关节运动空间的大小可作为一个大众化的康复评价参考标准。康复医师可以根据该值的大小衡量踝关节的康复情况,也可以根据测得的最大跖屈和最大背屈的转动角度以及拟合得到的四个方程,评价患者在某个运动方向的灵活程度从而制定针对性的康复训练方式。
用动作捕捉设备测量关节活动度的已有成果大都将标记点直接贴在被测关节处。而本实验没有直接将标记点贴装在足上,采用一个薄的硬板,这样避免了在测量过程中表面皮肤的移动给测量结果带来的影响,提高了测量的准确度。同时本研究也根据人体关节活动度的测量标准使用量角器测量了每个被测者在每个转到方向上的最大转动角度。使用运动捕捉设备得到的最大转到角度与其进行比较,其误差均小于2°,证明此测量方法的准确性。此测量方法的优点在于不仅可以较准确地得到各方向上的最大转动角度,而且可以容易得到不同跖屈和背屈角度下的其他四个方向上的最大转到角度。
本研究的结果与根据踝关节结构分析得到的结果存在一致性,而且计算踝关节三维运动空间大小的算法不仅将踝关节在不同方向的转动角度结合在一起,而且考虑到了它们之间的相互影响,弥补了医生的经验判断和测量关节活动度两种评价踝关节康复程度方法的不足。根据测得的最大跖屈和最大背屈的转动角度以及拟合得到的四个方程,可以评价每个方向上的灵活性和康复程度。同时,也可以利用拟合得到的方程来更加准确地规划踝关节康复仪器或假肢的运动轨迹。通过比较健康人和患者的三维运动空间的大小,发现患者患侧的踝关节运动空间的大小明显小于健康人,而健康被测者的踝关节运动空间的大小相差不大,证明了此衡量方法的可靠性。此研究对康复医学和康复机器人的研究具有一定的参考价值。
[1]Czajka CM,Tran E,Cai AN,et al.Ankle sprains and instability[J].Med Clin NorthAm,2014,98(2):313-329.
[2]Plaza-Manzano G,Vergara-Vila M,Val-Otero S,et al.Manual therapy in joint and nerve structures combined with exercises in the treatment of recurrent ankle sprains:a randomized,controlled trial[J].Man Ther,2016,26:141-149.
[3]关国平,孟强,牛文鑫,等.踝关节扭伤防护及其康复研究进展[J].医用生物力学,2016,31(1):78-82.
[4]Jamwal PK,Hussain S,Xie SQ.Review on design and control aspects of ankle rehabilitation robots[J].Disabil Rehabil Assist Technol,2015,10(2):93-101.
[5]禹润田,方跃法,郭盛.绳驱动并联踝关节康复机构设计及运动性能分析[J].机器人,2015,37(1):53-73.
[6]印松.踝关节康复机器人设计及人-机运动映射分析[J].中国机械工程,2012,23(21):2552-2556.
[7]Moseley AM,Beckenkamp PR,Haas M,et al.Rehabilitation after immobilization for ankle fracture:the exact randomized clinical trial[J].JAMA,2015,314(13):1376-1385.
[8]Bell-Jenje T,Olivier B,Wood W,et al.The association between loss of ankle dorsiflexion range of movement,and hip adduction and internal rotation during a step down test[J].Man Ther,2016,21:256-261.
[9]Sinclair J,Taylor PJ,Edmundson CJ,et al.Influence of the helical and six available cardan sequences on 3D ankle joint kinematic parameters[J].Sports Biomech,2012,11(3):430-437.
[10]Wadhwa V,Malhotra V,Xi Y,et al.Bone and joint modeling from 3D knee MRI:feasibility and comparison with radiographs and 2D MRI[J].Clin Imaging,2016,40(4):765-768.
[11]吴誉兰,章小宝.基于Kinect的动态手臂三维姿势的识别与仿真[J].计算机仿真,2016,33(7):369-372.
[12]Zhang M,Davies TC,Xie S.Effectiveness of robot-assisted therapy on ankle rehabilitation-a systematic review[J].J Neuroeng Rehabil,2013,21.
[13]Zhiyong T,Xiaodong X,Zhongcai P.Trajectory planning and mechanic's analysis of lower limb rehabilitation robot[J].Biomed Mater Eng,2015,26(Suppl 1):349-355.
[14]Deng H,Durfee WK,Nuckley DJ,et al.Complex versus simple ankle movement training in stroke using telerehabilitation:a randomized controlled trial[J].Phys Ther,2012,92(2):197-209.
[15]李荫湘,钱晋武,沈林勇,等.步行康复机器人轨迹控制方法研究[J].机电工程,2010,27(6):47-51.
[16]Ridola CG,Cappello F,Marcianò V,et al.The synovial joints of the human foot[J].Ital J Anat and Embryol,2007,112(2):61-80.
[17]Leardini A,O'Connor JJ,Catani F,et al.The role of the passive structures in the mobility and stability of the human ankle joint:a literature review[J].Foot Ankle Int,2000,21(7):602-615.
[18]Yonezawa T,Onodera T,Ming Ding,et al.Development of three-dimensional motion measuring device for the human ankle joint by using parallel link mechanism[J].Conf Proc IEEE Eng Med Biol Soc,2014,2014:4358-4361.
[19]杨久山,彭京亮,于波,等.三维动作捕捉系统在桡骨远端骨折患者腕关节功能评价中的初步应用[J].中国中西医结合影像学杂志,2013,11(3):290-292.
[20]Sandau M,Koblauch H,Moeslund TB,et al.Markerless motion capture can provide reliable 3D gait kinematics in the sagittal and frontal plane[J].Med Eng Phys,2014,36(9):1168-1175.
[21]Tejedor J,Gutiérrez-Carmona FJ.Polynomial curve fitting of the corneal profile in 2.2-mm corneal incision phacoemulsification[J].J Refract Surg,2015,31(1):42-47.
[22]戚非,闫勇,田应.基于MATLAB的多项式拟合[J].实验室科学,2006(5):63-65.
[23]颜清,彭小平.基于蒙特卡罗最小二乘的实验数据拟合方法[J].计算机与应用化学,2011,28(11):1473-1476.
[24]Khan K,Roberts P,Nattrass C,et al.Hip and ankle range of motion in elite classical ballet dancers and controls[J].Clin J Sport Med,1997,7(3):174-179.
[25]Rabin A,Kozol Z.Measures of range of motion and strength among healthy women with differing quality of lower extremity movement during the lateral step-down test[J].J Orthop Sports Phys Ther,2010,40(12):792-800.
AnArithmetic for Quantifying the 3D Motion Space ofAnkle
ZHANG Yun-chao,XIAO Jin-zhuang,WANG Hong-rui
College of Electronic and Information Engineering,Hebei University,Baoding,Hebei 071000,China
Objective To obtain the three-dimensional(3D)motion space of ankle by an integral for the 3D rotation angle with mutual relationships of rotation angles in different directions,which is used to evaluate the flexibility and recovery of ankle more accurately and fully.Methods Twenty-five graduate students were recruited to participate in this study,one group consisted of 20 healthy individuals without ankle injury,and the other was composed of 5 patients with ankle injury.A motion capturing system was used to simultaneously capture the 3D coordinates of the marked points on the foot.Next,these 3D coordinates were converted into rotation angles through trigonometric functions processed.The maximum rotation angles of adduction,abduction,varus,and eversion change with the rotation angles of plantar flexion and dorsal flexure were measured by using polynomial fitting.At last,the size of the ankle's 3D motion space was obtained by integrating the fitting functions.Results The ankle's 3D motion space of the healthy people was 41.256,and the variation among them was less than 10%.The ankle's 3D motion space of the patient side was 33.163,and the variation among them was less than 15%because of the different degrees of rehabilitation.There was significant difference between two groups(t=8.804,P〈0.01).With the same rotation angles of plantar flexion or dorsal flexure,the maximum rotation angle of varus was larger than that of eversion,and the maximum rotation angle of adduction was larger than that of abduction.Conclusion The algorithm can be used to quantify the 3D motion space of ankle more accurately,and to achieve a more comprehensive evaluation of ankle's flexibility and rehabilitation.
ankle;rehabilitative assessment;3D motion space;polynomial fitting;integral;motion capture
XIAO Jin-zhuang.E-mail:robot@hbu.edu.cn
R322.7
A
1006-9771(2017)10-1209-07
10.3969/j.issn.1006-9771.2017.10.018
[本文著录格式] 张云超,肖金壮,王洪瑞.一种踝关节三维运动空间的量化算法[J].中国康复理论与实践,2017,23(10):1209-1215.
CITED AS:Zhang YC,Xiao JZ,Wang HR.An arithmetic for quantifying the 3D motion space of ankle[J].Zhongguo Kangfu Lilun Yu Shijian,2017,23(10):1209-1215.
河北省自然科学基金项目(No.H2016201201)。
河北大学电子信息工程学院,河北保定市071000。作者简介:张云超(1992-),男,汉族,河北石家庄市人,硕士研究生,主要研究方向:踝关节康复的研究。通讯作者:肖金壮(1976-),男,汉族,河北保定市人,博士,副教授,主要研究方向:智能机器人。E-mail:robot@hbu.edu.cn。
2017-04-10
2017-05-18)
猜你喜欢
解放军医学院学报(2021年8期)2021-11-11 08:08:58
青春期健康(2020年16期)2020-09-16 10:34:28
中国眼镜科技杂志(2019年7期)2019-07-17 02:01:10
实用骨科杂志(2019年4期)2019-04-28 03:25:04
赤峰学院学报·自然科学版(2017年14期)2017-08-02 03:13:59
中国眼镜科技杂志(2017年21期)2017-01-18 17:06:27
阅读(科学探秘)(2016年3期)2016-05-30 10:48:04
中国继续医学教育(2015年11期)2015-04-12 12:42:27
河北医科大学学报(2014年1期)2014-03-15 00:44:10
中国医药指南(2013年4期)2013-06-23 16:28:45
