
海上拖缆采集地震数据接收点位移校正
2017-10-23 22:36薛东川朱振宇王小六何洋洋
石油地球物理勘探 2017年1期
薛东川 朱振宇 王小六 何洋洋
(①中海油研究总院,北京100028;②海洋石油勘探国家工程实验室,北京100028)
·采集技术·
海上拖缆采集地震数据接收点位移校正
薛东川*①②朱振宇①②王小六①②何洋洋①②
(①中海油研究总院,北京100028;②海洋石油勘探国家工程实验室,北京100028)
海上拖缆地震数据采集时,接收点位移会使成像剖面产生与采集船航向相反的偏移,越晚到达的信号越偏离实际位置。针对常规P1/90导航文件提供的时间信息只精确到1s、精度较低的问题,采用具有更高精度的P2/94导航文件的时间信息计算船速,逐条电缆校正地震数据;通过建立弧长坐标的方法,将平面上的曲线映射为弧长坐标中的直线,降低数据插值的复杂性。模型数据和实际资料的测试证明,经接收点位移校正减小了时移地震两次采集时船速不同带来的成像误差,使资料的一致性更好,有利于突出储层物性变化的地震响应,提高油气藏变化监测的精度。该方法不仅针对海上时移地震资料匹配处理有效,对常规深水地震勘探同样具有借鉴意义。
接收点位移校正 拖缆 船速 数据插值 弧长坐标 归一化均方根差异 时移地震
1 引言
海上拖缆采集中为了获得理想的观测系统参数,采集船必须保持一定的航速使接收电缆处于拉直的状态[1]。然而,常规地震数据处理中的检波点位置是固定的[1-3],海上拖缆采集数据时,接收点发生的位移会使成像剖面产生与采集船航向相反的偏移,且越晚到达的信号偏离实际位置越远。由于这种接收点位移产生的成像位置误差的量值一般较小,所以在海上地震资料常规处理中,通常忽略接收点位置误差,将拖缆采集数据近似为固定缆采集的数据。但对时移地震资料做匹配处理时,非目的层的数据差异一般接近于零,而差异主要集中在产油层,此时接收点位移产生的误差相对于油藏变化引起的细微差异无法忽略。尤其是当前、后两次地震资料采集时,采集船航速不一致甚至航向相反,这种接收点位移带来的误差影响将更加明显。因此,只有消除海上拖缆采集地震资料的接收点位移影响后,后续的时移地震资料匹配处理才更准确合理,为后续的地震资料处理、解释提供高品质的基础数据,提高油气藏变化监测的精度。为此,本文提出一种按单炮数据插值的方法,提高时移地震资料的匹配精度。
2 方法原理
以图1所示的一条海上二维拖缆为例,接收缆受拖船牵引保持匀速移动,箭头指示接收电缆的移动方向,×是t=0时刻炮点激发时电缆上水听器的初始位置,○是水听器随采集船移动后的实际位置(即地震记录不同时刻水听器的实际位置)。在炮点激发的瞬间,○与×完全重合;随后○整体匀速向右移动;在t=2.5s时,○与×错位重合,错位一个接收点;在t=5s时,○与×再次错位重合,错位2个接收点。如前所述,虽然地下反射信号的实际接收位置是○,但资料处理中定义的是×固定位置上的信号。需要明确的是,地下反射信号的时空分布仅由该炮的震源子波、地下介质结构及炮点与地下介质的相对位置决定,在放炮瞬间就已经确定,而与接收点的放置位置无关。所以,已知图1中○点的值,求×点的值,本质上是一个单炮地震数据的空间插值问题,可以通过t-x平面上的二维插值,或一系列时间点上的空间一维插值解决接收点位移校正问题。三维拖缆数据的接收点位移校正方法与二维数据校正方法类似,其中船速(接收点移动速度)的准确计算与三维拖缆漂移状态下的数据插值是实际资料校正的关键。
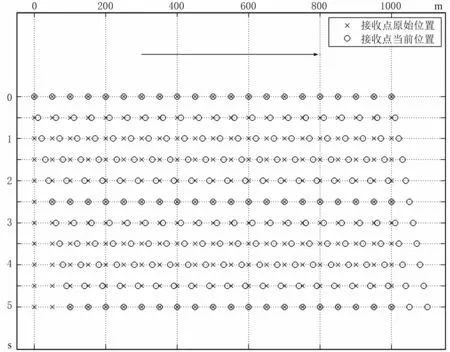
图1 海上二维拖缆单炮接收时接收点位置变化示意图
3 船速计算
海上拖缆采集数据接收点位移校正首先要准确计算出采集船的航速。图2展示了采集船沿K炮线进行拖缆数据采集的过程。图中箭头方向指示采集船的行驶方向,左右两个气枪交替放炮,放炮的炮点依次为a、b、c、d、e、f,其中,炮点a、c、e由左源激发,炮点b、d、f由右源激发,图中三角形对应放炮时采集船的参考点位置,即参考点A对应a炮激发时采集船的位置,参考点B对应b炮激发时采集船的位置,依此类推。采集船的航行速度可以根据采集船在相邻两次放炮的时间间隔内行进的路程求得,即

式中:v a为a炮数据采集时采集船的平均航行速度;T a为a炮的激发时间;Tb为b炮的激发时间;x A、y A分别表示参考点A的横坐标和纵坐标;x B、y B分别表示参考点B的横坐标和纵坐标。对于包括N个炮点的K炮线来说,可以根据式(1)分别计算出前N-1炮数据采集时采集船的平均航行速度,而炮线最后一炮(第N炮)采集时的平均船速则用相邻的第N-1炮的平均船速代替。
按照式(1)计算K炮线上各炮数据采集时采集船的航行速度所需要的全部信息均可以从该炮线的P1/90导航文件中读取。P1/90导航文件是英国勘探委员会(UKOOA,United Kingdom Offshore Operators Association)于20世纪90年代初制定的海上地震勘探导航格式文件,由ASCII码编写,每行80个字符。按照P1/90导航文件格式规定:每行记录的首字符如果是V,则表示该行记录是采集船参考点信息,不同列分别记录了该炮点的坐标、海水深度、经纬度、炮线名、放炮时间等信息[4]。
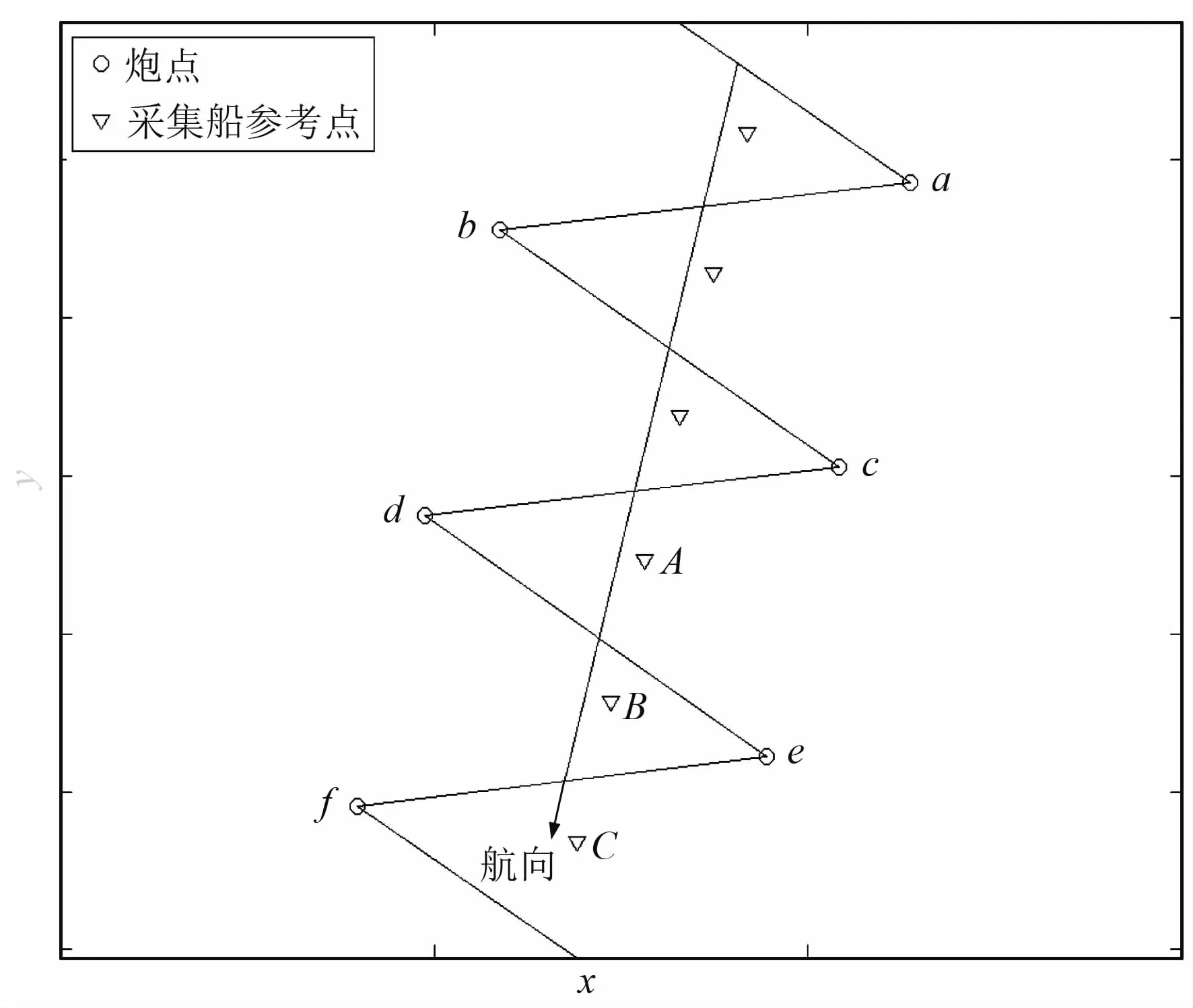
图2 三维海上拖缆数据采集过程示意图
需要指出的是,P1/90导航文件所记录的放炮时间信息只精确到1s,误差较大,由此计算得到的采集船航速精度较低。图3a是以K炮线的P1/90导航文件计算的放炮时间间隔,数值集中在7s和8s,包含较大的舍入误差。图3b是用此放炮时间间隔按式(1)求出的采集船航行速度,受时间精度影响,船速主要集中在2.65m/s和2.35m/s附近,中间数值存在空白,即表明采集船航行时速度总是在相差约0.3m/s的两个速度之间来回跳变,这显然与地震资料采集时采集船基本保持匀速航行的情况不符。这种情况可以通过从P2/94导航文件中提取相应的放炮时间得到改善。P2/94导航文件是P1/90导航文件的基础文件,记录的放炮时间精度达到了0.1s。P2/94导航文件同样是UKOOA制定的海上地震勘探导航格式文件,用ASCII码编写,每行80个字符。按照P2/94导航文件格式规定:每行以E1000开头的数据记录了放炮时间,第59~66列是放炮时间[5]。图4a是从K炮线的P2/94导航文件中提取的放炮时间间隔,数值主要分布在7.2~8.0s之间的间隔0.1s的条带上,分选性更好。图4b是用P2/94导航文件的放炮时间间隔求出的采集船航速,数值从2.38m/s逐渐变化到2.58m/s,相邻两炮船速的变化减小,更符合实际情况。
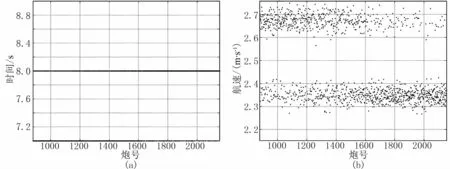
图3 K炮线P1/90计算的放炮时间间隔(a)和采集船航速(b)
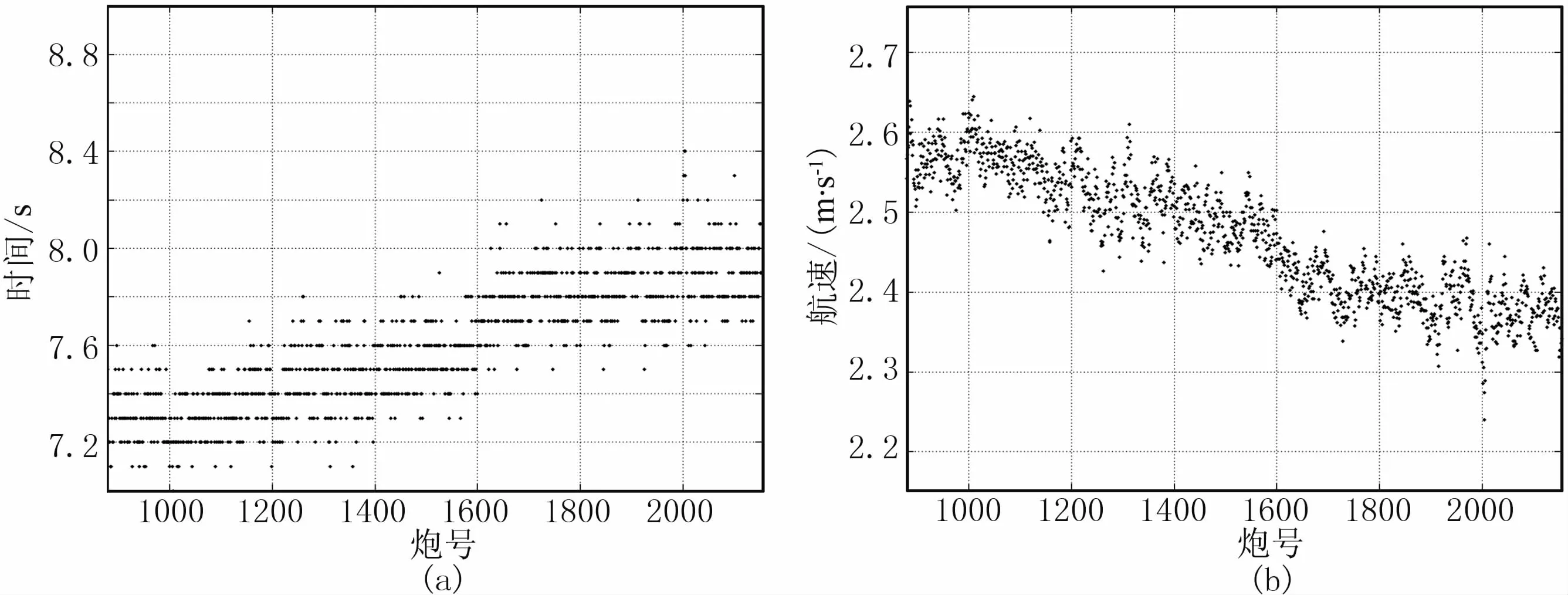
图4 K炮线P2/94计算的放炮时间间隔(a)和采集船航速(b)
4 三维单炮数据接收点位移校正
当求出数据采集时每一炮的船速以后,就可以根据放炮时接收点的初始位置估算采集过程中接收点在任意时刻的空间位置,然后通过数据插值完成每一炮地震数据的接收点位移校正。但要指出的是,在海上实际数据采集时,接收电缆受洋流等环境因素影响,很难保持理想的直线状态,长达数千米的电缆在海面上呈现出不同程度的弯曲,而电缆末端一般会偏离航线更远的距离(要求羽角控制在10°以内[6])。此外,为了防止接收电缆之间相互缠绕,缆间距一般控制在100~150m。然而,海水中地震子波的长度也在90~150m,联络线方向上地震信号采样不足会产生严重的空间假频[3]。因此,海上拖缆三维地震数据的三维数据插值没有实际意义,实际地震资料处理中将单炮三维地震数据按接收电缆分组,在每条电缆上做二维或一维数据插值,实现三维数据的接收点位移校正。
由于海面上弯曲的采集电缆是条二维曲线,无法进行空间一维插值。为此,定义弧长坐标,如图5所示。图中的曲线代表海面上一条采集电缆,○是缆上的接收器,它的位置由(x,y)坐标确定。当采集电缆受拖船牵引移动时,缆上的接收器受电缆牵引,而洋流对接收器的作用力要远小于电缆的牵引力,接收器沿着弯曲电缆的切线方向(箭头方向)移动。在t=0时刻,以电缆上靠近拖船一端的首个接收点为原点,其弧长坐标为0,记作R00,定义放炮时各接收点的弧长坐标为
式中:rj是接收点j到接收点j-1的弧长;x j、y j分别表示第j个接收点的横坐标和纵坐标。由于海面上采集电缆的真实形态难以准确描述,式(2)实际应用时以两接收点间的直线距离近似替代弧长。因此,电缆上接收点k的位置可以描述为电缆上距离原点的折线距离为R k的点。通过空间映射将二维曲线变换成一条一维直线,方便一维插值计算。而t时刻采集电缆上各接收点相对于炮点激发时弧长坐标原点的弧长坐标的计算公式为

式中:v是采集船航行速度;t表示当前地震数据的记录时间。当求出采集时接收点的实际位置后,就可以通过t-x域的二维插值或一系列时间点上的空间一维插值得到炮点激发时接收器所在位置的地震记录。再逐条电缆进行数据插值,就完成了三维单炮拖缆数据的接收点位移校正。
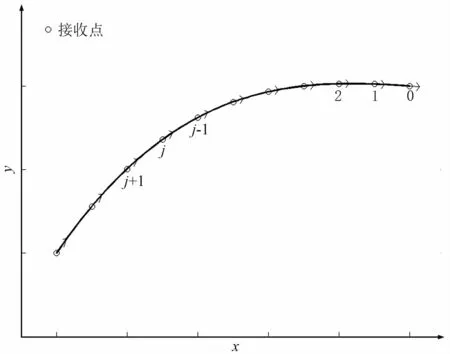
图5 计算弧长坐标示意图
5 应用效果
5.1 模型验证
图6是Marmousi2纵波速度模型。设计海面上一条长3375m的采集电缆在拖船的牵引下自西向东移动,船速为2.5m/s,图中分别用*和▽标识放炮时炮点和接收点的位置。采用二维有限元声波方程数值模拟单炮记录的波场空间分布,记录时长为3.5s。图7是模拟单炮记录的接收点位移校正结果。由图7a可以看出,海上拖缆采集地震数据因为接收信号时电缆保持匀速移动,导致实际接收记录与期望采集记录之间存在误差。对比图7a、图7e可以看出,接收点位移校正消除了船速带来的影响(图7d),与放炮激发时固定位置上接收到的记录(图7c)趋于一致,仅海底反射波强能量有少量残留(图7e)。由此可见,单炮记录插值可以有效去除拖缆采集数据的船速影响,将其校正为固定接收位置上采集的数据。
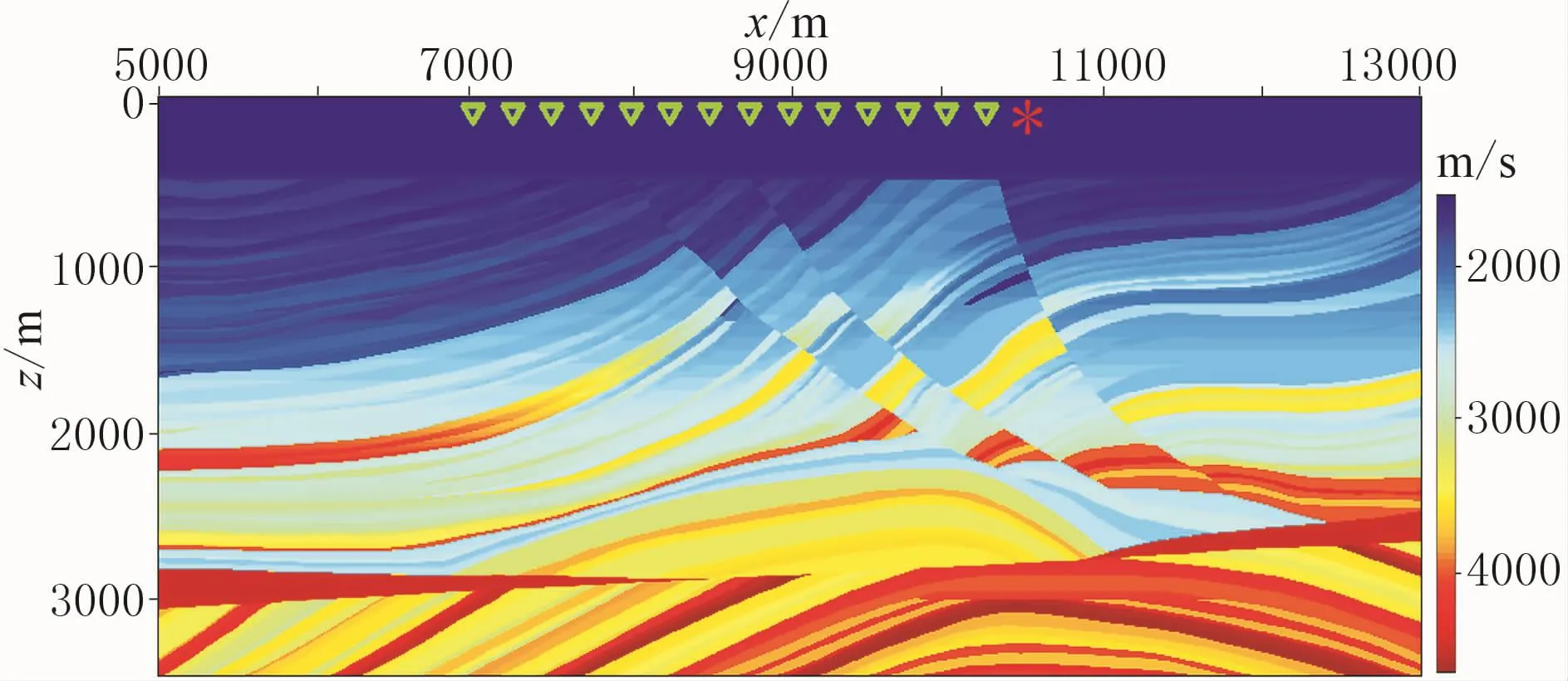
图6 Marmousi2纵波速度模型
海上时移地震数据经过接收点位移校正后,消除了两次采集时船速不同带来的成像误差,地震资料的一致性更好。为了检测两次成像结果的可重复性,需要对标志层位置的时窗内的成像结果做可重复性测量。这些检测手段包括计算频谱、相关系数、时移误差、振幅比和均方根振幅差等[7]。目前最常用的重复性测量方法是计算NRMS(Normalized Root-Mean-Square difference,归一化均方根差异)。NRMS值是两次成像的振幅差的平均均方根振幅除以两次成像的平均均方根振幅之和,即

式中:B是基础剖面(前一次采集);M是观测剖面(后一次采集)。均方根算子定义为
式中:Ai是成像剖面时窗中的振幅;i是样点序号,i=1,2,…,N,N是时窗中的样点个数。时移地震用NRMS值检测两次处理结果的可重复性,如果NRMS=0,表示数据完全一致;如果NRMS=2,说明数据反相关;如果B和M只包含随机噪声,NRMS值受相位和振幅差、时移误差和噪声的影响,值越小说明重复性越好[8]。
图8是对图7中的单炮记录分时窗计算NRMS值的比较。将图8b看作基础数据,图8a和图8c看作两次不同的观测数据,设置从浅至深3个时窗,分别计算校正前后的NRMS值。由图8a可以看出,从浅至深的3个时窗内NRMS值逐渐增大,说明与图8b的一致性逐渐变差,这是因为越晚到达的信号电缆越偏离放炮时的初始位置,船速带来的误差影响就越大。而接收点位移校正后,图8c中1.0~1.5s时窗的NRMS值从校正前的0.094降至校正后的0.008,1.75~2.250s时窗的NRMS值从0.192降至0.006,2.5~3.0s时窗的NRMS值从0.261降至0.003,而整个记录的NRMS值也从0.243降至0.103。校正后各个时窗的NRMS值相对校正前大幅降低,表明接收点位移校正降低了船速影响,提高了资料的一致性。
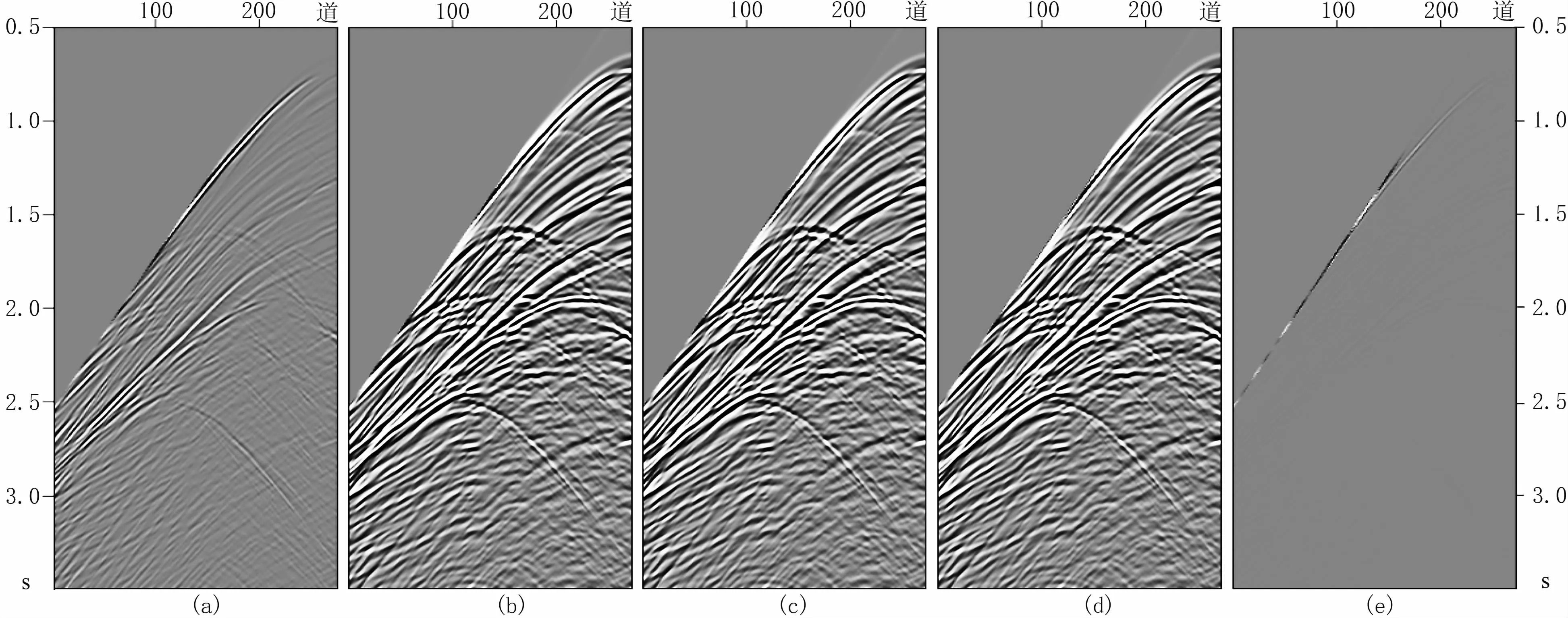
图7 模拟单炮记录的接收点位移校正前、后结果对比

图8 图7数据接收点位移校正前、后NRMS值比较
图9是图8单炮记录加随机噪声后计算的NRMS值的比较。在图9a、图9b中分别添加了幅值为有效信号最大幅值10%的随机噪声。仍然从浅至深设置3个时窗,计算校正前、后的NRMS值。可以看出,添加噪声后,各个时窗内的NRMS值较图8都显著增大。但经接收点位移校正后,1.0~1.5s时窗的NRMS值从校正前的1.350降至校正后的1.349,1.75~2.25s时窗的 NRMS值从1.269降至1.255,2.5~3.0s时窗的 NRMS值从1.370降至1.365,而整个记录的NRMS值也从1.240降至1.226。校正后各个时窗的NRMS值相对校正前均有不同程度的降低,表明即使在很强的噪声水平下,接收点位移校正仍然能够降低船速影响,提高资料的一致性。
5.2 海上时移地震资料测试
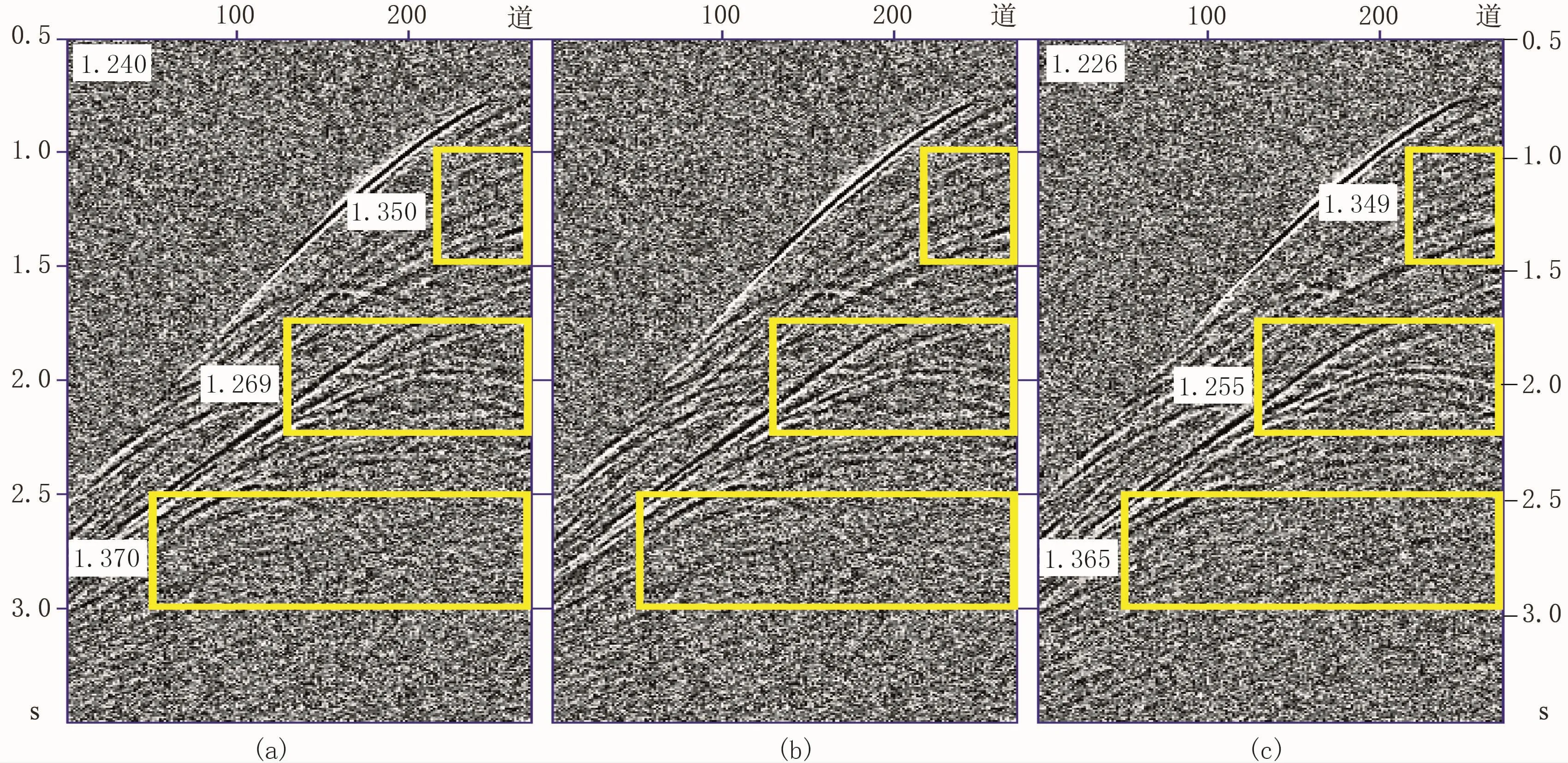
图9 加噪后的接收点位移校正前、后NRMS值比较
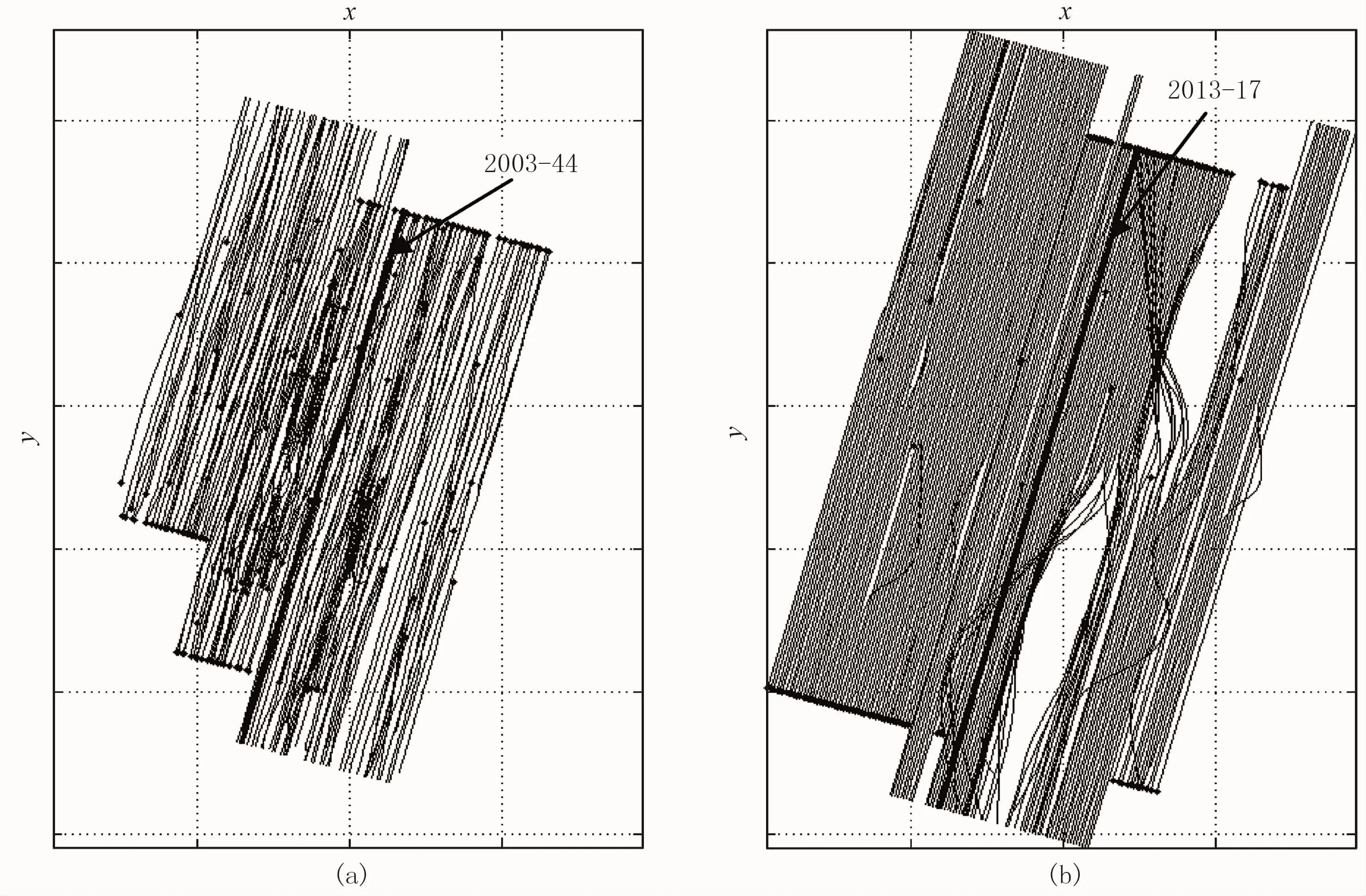
图10 W区海上时移地震采集炮线分布示意图
图10是海上W区2003年和2013年时移地震采集的测线分布图。从中选取两条相邻的主测线分别记作2003-44线和2013-17线,对这两条测线的叠加剖面做可重复性测量,检验三维地震资料接收点位移校正的实际应用效果。图11为两条测线的叠加剖面。图11a、图11c在资料处理中采用了相同的处理参数,图11b、图11d两个剖面的处理参数保持一致。从浅至深选取3个不同时窗计算接收点位移校正前后的NRMS值,其中1.2~1.5s的时窗内是该地区储层上方的标志层位,其NRMS值从校正前的0.4972降为校正后的0.4956;1.5~1.7s的时窗内包含一套尚未开采的储层,其NRMS值从校正前的0.5049降为校正后的0.5030;而1.9~2.2s的时窗内包含了一套开采层,经过10年的油气开采,储层物性发生改变,其NRMS值从校正前的0.5968增大为校正后的0.5972。在保持相同处理参数的情况下,时移地震数据经接收点位移校正后减小了因两次采集时船速不同带来的成像误差,使得资料的一致性更好,这有利于突出储层物性变化的地震响应,提高了油气藏变化监测的精度。
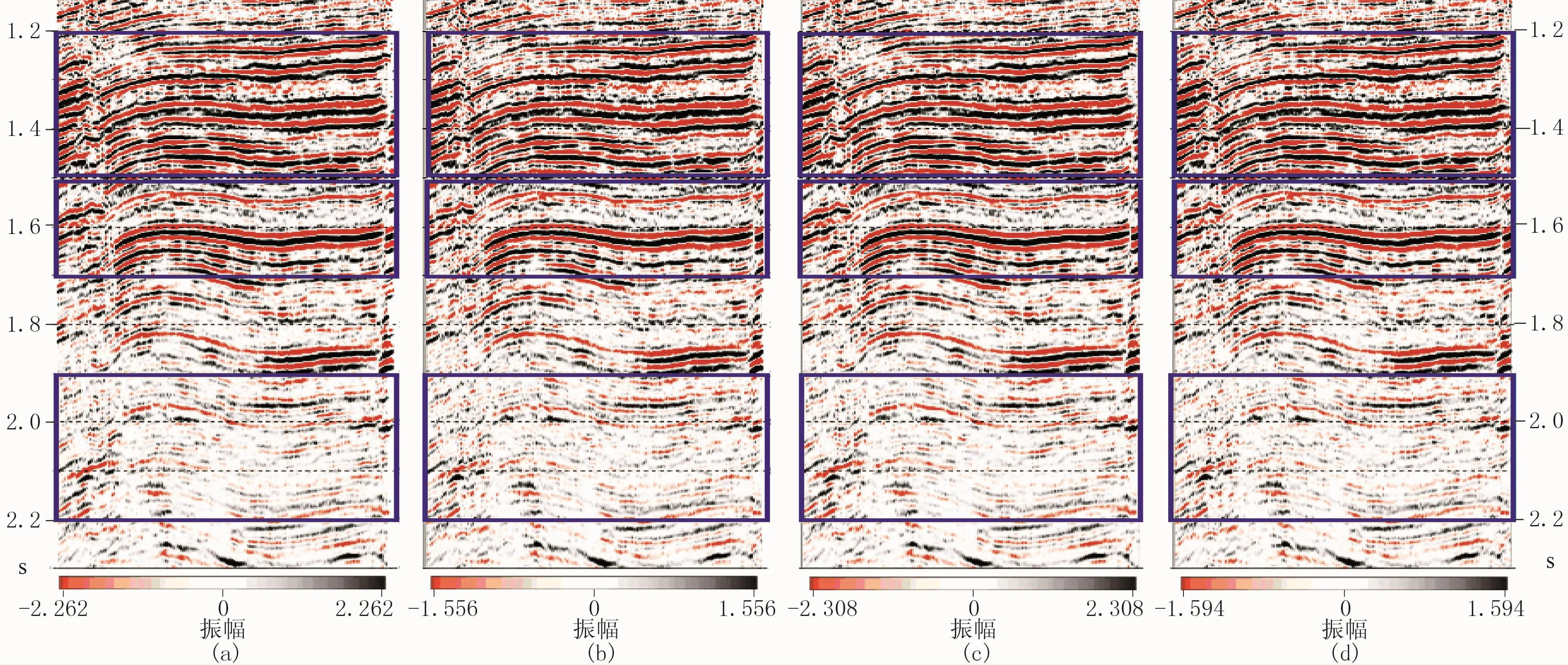
图11 时移地震资料接收点位移校正前、后的叠加剖面对比
6 结论
本文围绕提高海上时移地震资料一致性提出了接收点位移校正方法,可以得出以下几点结论。
(1)海上拖缆采集的地震数据都存在接收点位移校正问题。地震信号的实际接收位置较记录位置靠前,越晚到达的信号偏离实际位置越远;
(2)接收点位移校正能够降低两次地震采集时船速不同带来的非油藏因素影响,是时移地震资料处理的必要步骤;
(3)本文接收点位移校正方法利用P2/94导航文件的时间信息计算船速,建立弧长坐标,将平面上的曲线映射为弧长坐标中的直线,对单炮记录逐条缆线做插值校正,实际应用结果证明其有效提高了时移地震资料的一致性。
[1] 谢里夫R E,吉尔达特L P编;初英等译.勘探地震学.北京:石油工业出版社,1999.
[2] 渥·伊尔马滋著;黄绪得等译.地震数据处理.北京:石油工业出版社,1994.
[3] 陆基孟.地震勘探原理.山东东营:中国石油大学出版社,2006.
[4] http:∥www.seg.org/documents/10161/77915/ukooa_p1_90.pdf
[5] http:∥www.seg.org/documents/10161/77915/ukooa_p2_94.pdf
[6] 海上拖缆式地震资料采集技术规程.中华人民共和国石油天然气行业标准,SY/T 10015-2013.Technical specifications for towed streamer marine seismic data acquisition.Standard of Petroleum and Natural Gas Industries,P.R.C.SY/T 10015-2013.
[7] Eiken O,Haugen G U,Schonewille M et al.A proven method for acquiring highly repeatable towed streamer seismic data.Geophysics,2003,68(4):1303-1309.
[8] David H J.Practical Applications of Time-lapse Seismic Data.SEG Distinguished Instructor Series,16,2013.

P631
A
10.13810/j.cnki.issn.1000-7210.2017.01.001
薛东川,朱振宇,王小六,何洋洋.海上拖缆采集地震数据接收点位移校正.石油地球物理勘探,2017,52(1):1-7.
1000-7210(2017)01-0001-07
*北京市朝阳区太阳宫南街6号中海油大厦B座,100028。Email:xuedch@cnooc.com.cn
本文于2016年3月28日收到,最终修改稿于同年11月22日收到。
本项研究受中海油有限公司综合研究项目“海上时移地震技术优化与应用”(YXKY-2015-ZY-03)和国家重大专项课题“中国近海中深层地震勘探关键技术”(2016ZX05024001)联合资助。
(本文编辑:金文昱)
薛东川 1979年生;2001年获青岛海洋大学应用地球物理专业学士学位;2004年获中国石油大学(北京)地球探测与信息技术专业硕士学位;2007年获中国石油大学(北京)地质资源与地质工程专业博士学位。现就职于中海油研究总院,从事高性能计算和地震数据处理方法研究。
猜你喜欢
世界海运(2021年9期)2021-10-08
上海海事大学学报(2019年4期)2019-12-30
兵工学报(2019年7期)2019-08-28
船海工程(2018年5期)2018-11-01
珠江水运(2018年5期)2018-04-12
石油地球物理勘探(2018年6期)2018-03-22
湖南大学学报(自然科学版)(2016年5期)2016-08-25
中国水运(2015年10期)2015-11-09
应用声学(2015年3期)2015-10-27
中国水运(2015年2期)2015-04-23
