基于囊状颗粒物的新型机械手
2017-10-23 10:19白江兰白树峰黄文峰尹兆双
黑龙江工程学院学报 2017年5期
白江兰,白树峰,黄文峰,尹兆双
(黑龙江工程学院 电气与信息工程学院,黑龙江 哈尔滨 150050)
基于囊状颗粒物的新型机械手
白江兰,白树峰,黄文峰,尹兆双
(黑龙江工程学院 电气与信息工程学院,黑龙江 哈尔滨 150050)
机械手是机器人的重要组件之一,由于传统通用机械手都是由多个独立活动关节构成的仿人多指机械手,需要大量的复杂结构和计算,从而导致其相应的高成本,同时,传统通用机械手响应时间长,抓取动作缓慢且不能完全适应目标物体的形状,甚至可能损坏目标物体。因此,针对传统通用机械手的诸多缺陷,设计一种新型的被动式机械手,方法是由大量的小颗粒物质包裹在一个球状弹性膜中,利用空气正压-负压的组合使弹性膜内的微小颗粒物质可以在松散-游离状态相互转换,使得它可以迅速地抓取和释放普通通用机械手难以抓取的具备复杂外形的物体,并具有形状适应性强、控制简单、可靠性高、执行效率高以及成本低等优点。
囊状机械手;微小颗粒物质;真空状态;松散-游离;弹性膜
大多数机械手主要是由仿人手来设计的,人的手指是十分复杂的,用机械手抓取一个物体时,手指必须精确定位,并且准确判断出抓取物体时所需要施加力的大小,从而实现顺利抓取物体的目的。那么按照这种方式来设计机械手,将会涉及到许多种不同的传感关节,这使得机械手无论是在算法还是在控制电路上都是非常复杂的,而且降低了微控制器的处理效率,随着科技的发展,现在已经出现基于颗粒物的机械手。
针对现实生活中机械手的一些缺点,本文对基于颗粒物的机械手进行了进一步的改进。
1 总体设计方案
新型机械手的设计核心是:“手”由大量的小颗粒物质包裹在一个球状弹性膜中,利用空气正压-负压的组合迅速地抓取和释放普通机械手难以抓取的物体。整体方案如图1所示,该方案由机械手、机械臂、抽气泵、意法半导体公司的STM32开发板、继电器、舵机驱动电路以及机械臂舵机等部分构成。LED指示电路的作用是显示机械手是不是在正常地工作。继电器首要负责控制气泵的启动与停止两种状态间的转换。STM32不断地控制电机驱动电路以此来控制机器臂伺服舵机,同时负责通过控制继电器的状态来控制充气泵、抽气泵的启停。
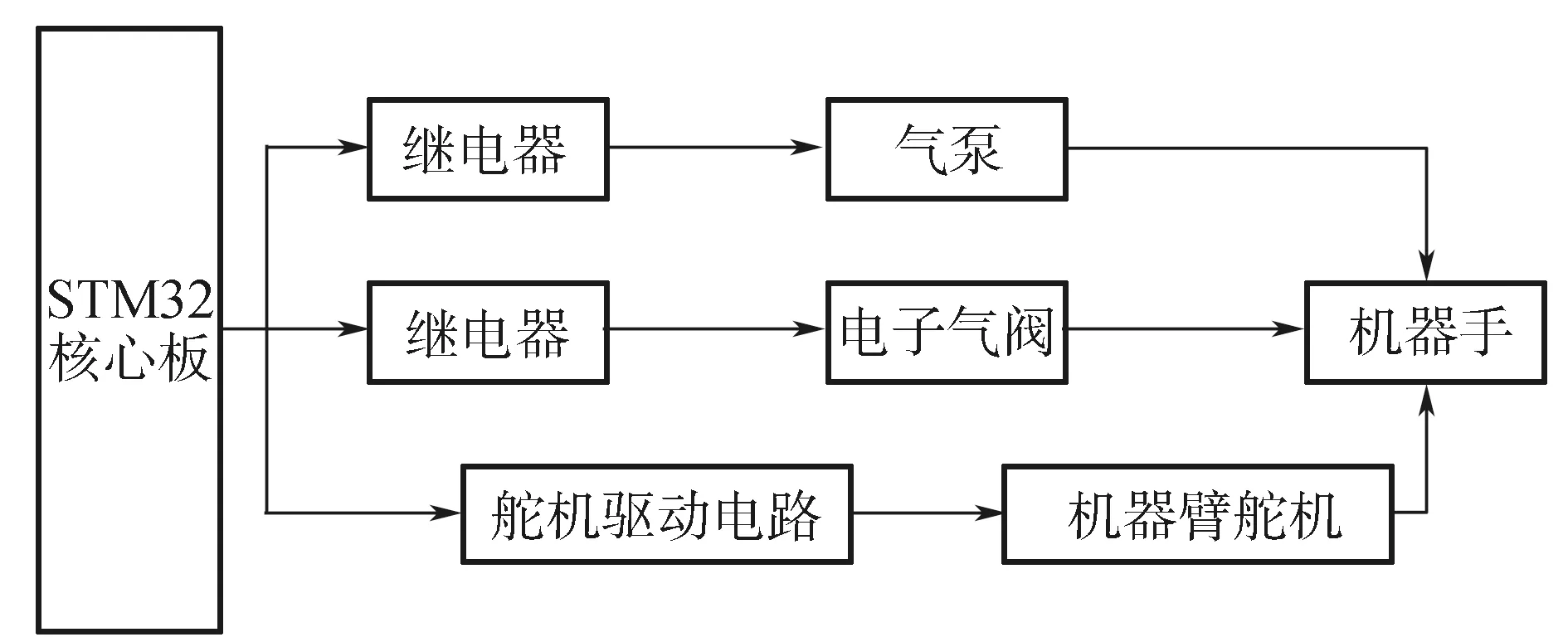
图1 设计方案
当系统通电工作后,首先利用机械手控制器来控制机械手臂的上升、下降、旋转等动作让“手”找到被抓取物体的具体位置,并通过调节高度等来使“手”适应被抓取物体的具体形状,然后保持住这种状态并“告知”控制器当前动作已完成,通过物体检测电路使STM32驱动继电器来驱动抽气泵使“手”内由于空气负压而产生硬化,从而将被抓取的物体紧紧地抓在自身弹性膜的表面,实现抓取动作。
抓取完成后,就是“搬运”,STM32通过对机械臂伺服舵机的控制来控制机械臂的旋转,这样可以达到将被抓取物体挪到指定位置的目的。最后就是释放物体,利用空气正压可以将被抓取物体释放,并使机械手返回到原有的自适应物体形态的状态,以便于进行再次对物体的抓取。
通过上述过程,机械手系统可以很好地实现对物体的抓取和释放的功能,而且有较高的执行效率和可靠性。
2 颗粒物选取方案设计
乳胶球里的固体微小颗粒选择应该遵循低密度、低成本、防潮效果好、半径小的原则进行选择。首先低密度主要是为了该物质可以在大量使用的同时避免因为自身重量而影响“手”的抓取力或者使“手”变形;低成本主要是节约资金,在最低消费的情况下选择最佳适合的物质;防潮主要是所选的固体微小颗粒物应该不容易吸收空气中的水分,延长“手”的使用周期,半径小使得选取的物质不至于太大而影响新型机械手的外部形状。通过生活中的观察最后选定3种固体小颗粒物质作为备选材料,3种物质具体情况如表1所示。

表1 物质选择
由表1对比可以看出,首先3种物质半径相差不大,但是磨砂咖啡豆颗粒的密度相对食盐和细沙来说是较小的,接近于水的密度,所以当乳胶球内装入相同体积的3种物质时,磨碎咖啡粒的质量最小,进一步说明磨碎咖啡粒的重量比较轻,有利于控制“手”的抓取灵活性,同时可以避免球膜变形。其次,食盐吸水容易潮解,这样降低了“手”的使用周期,所以食盐无论是在密度上讲还是在潮解性上来讲都不可以选择作为乳胶球内的物质,通过生活调查可知3种物质的市场价格相差不大且价格低廉。通过实验可以知道,把上述3种物质混合使用,效果不如单一使用磨碎咖啡粒好。
通过上述比对,磨碎咖啡粒具有密度低、成本低、防潮效果好这3个优点,因此,选择磨碎咖啡粒作为乳胶球里面的固体微小颗粒物最为合适。
3 “手”结构方案设计
新型机械手是由弹性膜、固体微小颗粒物、抽气泵组合而成,其核心设计是让固体微小颗粒物填充到球状弹性膜总体积的2/3,利用空气负压-正压组合来实现小颗粒物硬化-松散状态的转换,进而达到对物体抓取的目的,在这里没有电机、线缆和铰链,只有一个用来给机械手充气、抽气的大功率空气泵。新型机械手用一个刚性托半包着,另外,还有一个抽气口和微小颗粒物过滤装置,采用这种设计的主要优点是它的机械结构简单。
新型机械手的结构设计如图2所示,这类布局使得机械手具备低成本和轻易制造的特点。在新型机械手的设计过程中,刚性托是一个重要的设计要素,因为它能辅助机械手指向被抓取对象,并且可以增加与物体之间的垂直接触面积以加强抓取效果。
乳胶球膜被夹在基座和刚性托之间以达到气密性良好的目的,球膜的厚度小于0.33 mm,其内部填充了350 cm3容量的微小颗粒物。在这个容积状态下,机械手是刚好充满且球膜没有发生形变,这使得机械手在松弛状态下容易变形。机械手的外形类似一个半径为43 mm球状。乳胶球里微小颗粒物应该选择具有低密度的微小颗粒物,因为这种低密度的材料可以大量使用,同时避免因为自重而影响抓取力或者使球膜变形。
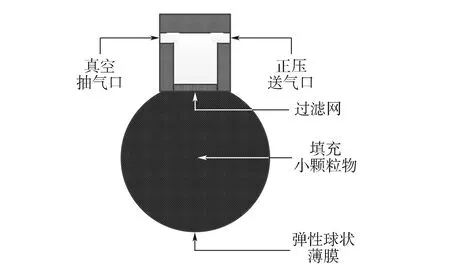
图2 “手”结构
4 机械臂方案设计
机械臂是机械手特别重要的部件,分为主臂系统和从臂系统。通过电机驱动和关节连接方式。解决相对复杂的操作。因此,在研究机械手臂时应当斟酌如下几个方面:
1)斟酌被抓取物体的重量。
2)斟酌活动时的动载荷及迁移转变惯性。
3)为了避免机械臂部由于活动过度导致很大的形变,设计机器臂时要对其所需要的截面外部形状采用合适的使用方式。
4)在设计机械手臂时要尽可能使臂部活动部位更加轻便,以削减机械臂对其回转轴的转动惯量,这样机械手将会有很高的活动速度。
按照以上机器臂设计原则以及常用机器臂的运动形式再结合本设计指标综合斟酌,设计出新型机械手的码垛型机械手臂如图3所示。该机械手臂属于码垛型臂。它的特性是安装在腰部上,在这个机构里的小臂和前后两个大臂相互配合来实现码垛以及搬运工作。该机器臂主要由其身上的4个相互连接的关节组成,这样便可进行几个有用的活动:腰部的180°旋转,大臂进行上与下来回活动,小臂进行前与后的活动和手腕往复活动,这些活动均通过安置的舵机控制。选用舵机做码垛机器臂的驱动源主要是因为舵机的转动角度仅仅是通过PWM控制,即通过方波的占空比大小控制所需要转动的角度,这点在作品的设计与调试过程里是很方便的,在调试过程中通过调节方波占空比的大小来使舵机转出理想的角度。
由图3可以看出机械臂主要由舵机、铝合金机架两部分组合而成。这样的设计组合可使机械臂结构优化,并且运动时动作平稳可靠,成本相对于传统通用机械手臂较低。众所周知,自由度是进行机械手臂研究时首要考虑的。自由度是指拥有独立运动坐标轴的数目。自由度越多,机械手的灵活性越大,通用程度更好,布局更加庞大。本课题设计的机械臂具备3个自由度,可以使新型机械手抓取物体更加矫健的同时结构布局也不庞大,提高了抓取效率。所具备的自由度是靠4个舵机彼此配合来调节。整体结构主要有4个关节,这样的构架不仅外形美观,符合力学的标准,而且臂的灵活性强(上升,下降,旋转等),稳定性高。
本机械手臂活动形式的设计属于关节型。关节型机械手便于完成更圆润的轨迹。这类设计的好处是行动矫捷,所占空间小,具备很大的工作范围,可以在狭小空间范围里躲避各种障碍物,全部关节都采取轴承毗连。在其中3个关节附近,总共配置了4个舵机,其中2个舵机是用来调节机械臂的高度,而另外两个用来调节机器臂的左右旋转角度,在4个舵机的配合下,机械手臂可以灵活地运动,从而很好地带动机械手。舵机的工作进程是完全主动的,正常运转时不必人工干预就能够完成请求的行动。
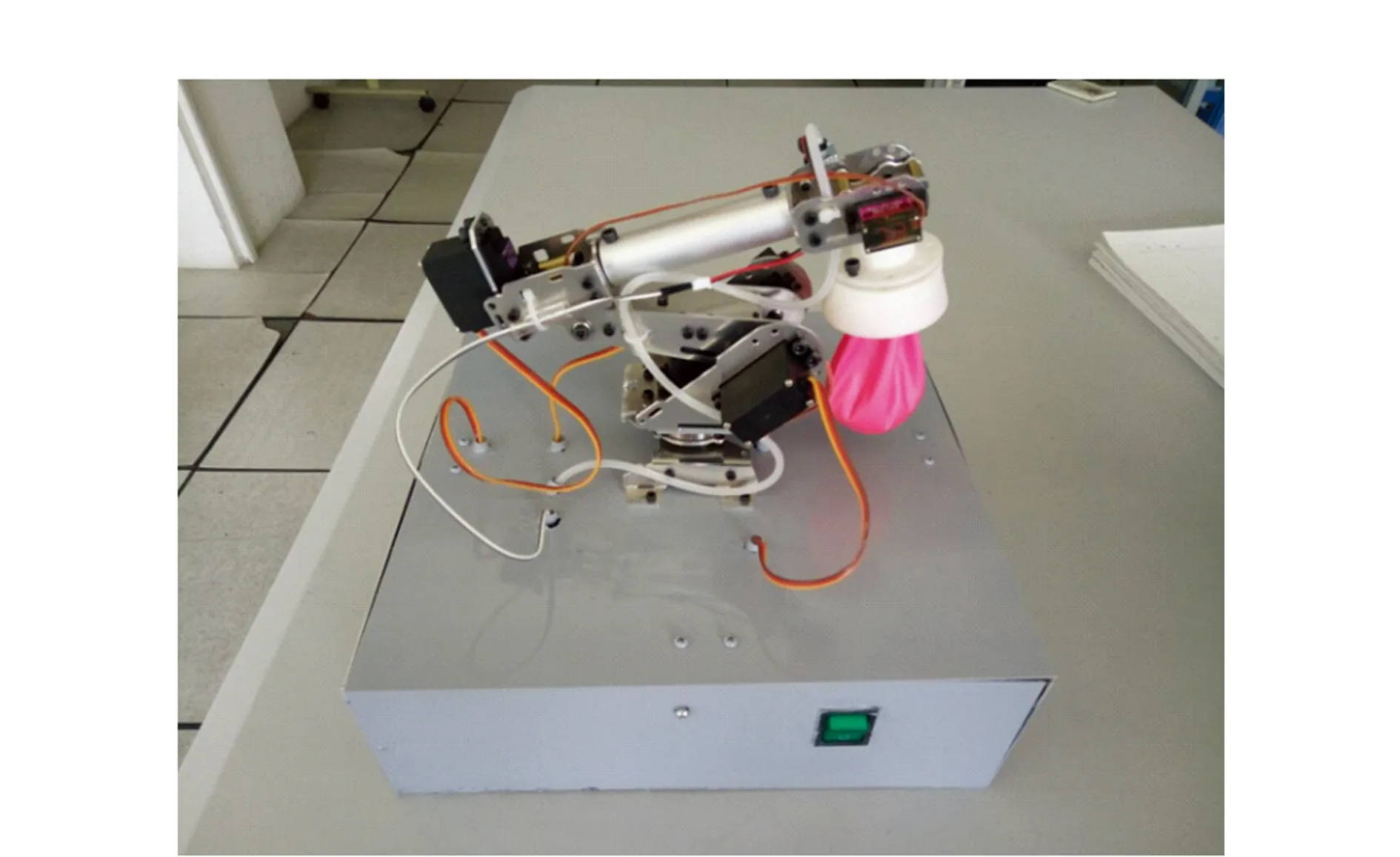
图3 机械臂外观
工作原理:如图4所示,与开关相连的是电源,电源由三节锂电池构成,可重复充电使用,电源分为两部分对其进行供电:一部分通过转换器将12 V转换成5 V,给单片机供电;另一部分是将12 V电源直接给气泵供电。系统使用STM32 F103开发版,后续电路使用核心板的6个IO口,分别驱动气泵、舵机和电子气阀,整个工作系统分为气泵继电器模块、电子气阀继电器模块和舵机模块。
气泵继电器模块通过IO口输出信号驱动继电器的开和闭,进而控制气泵的工作状态;电子气阀在抽气气泵打开之前打开,在抽气气泵关闭之前关闭,这样可以保证气囊内部是真空状态。
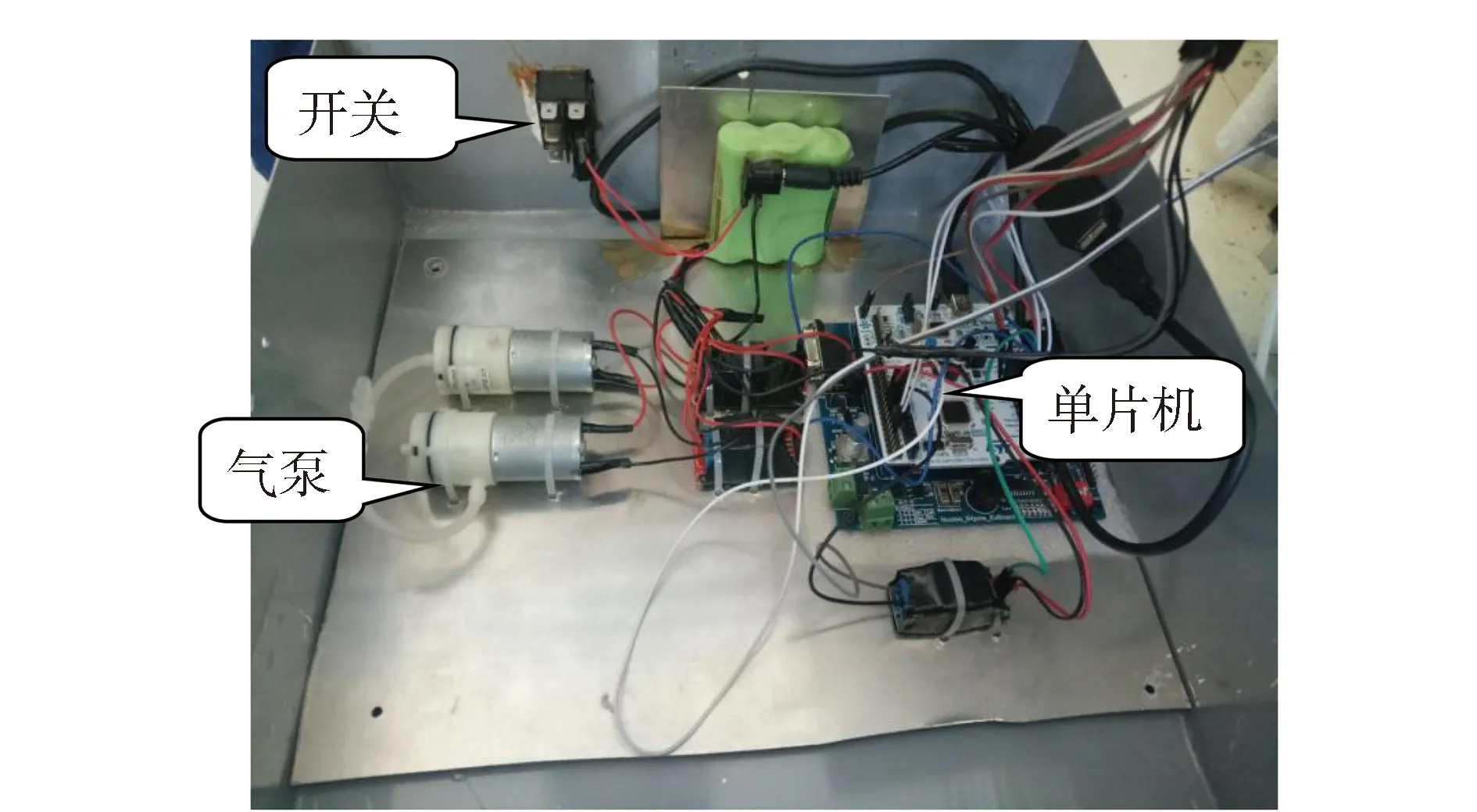
图4 机械臂内部结构
机械臂的工作状态由4个舵机进行控制,4个舵机分别通过4个IO口的复用功能输出PWM信号加以控制。
5 调试过程及其结果
基于微小颗粒物真空状态转换的新型机械手的设计工作已经完成,新型机械手通过大量的测试,现将实验数据以表格的形式呈现出来,具体如表2所示。
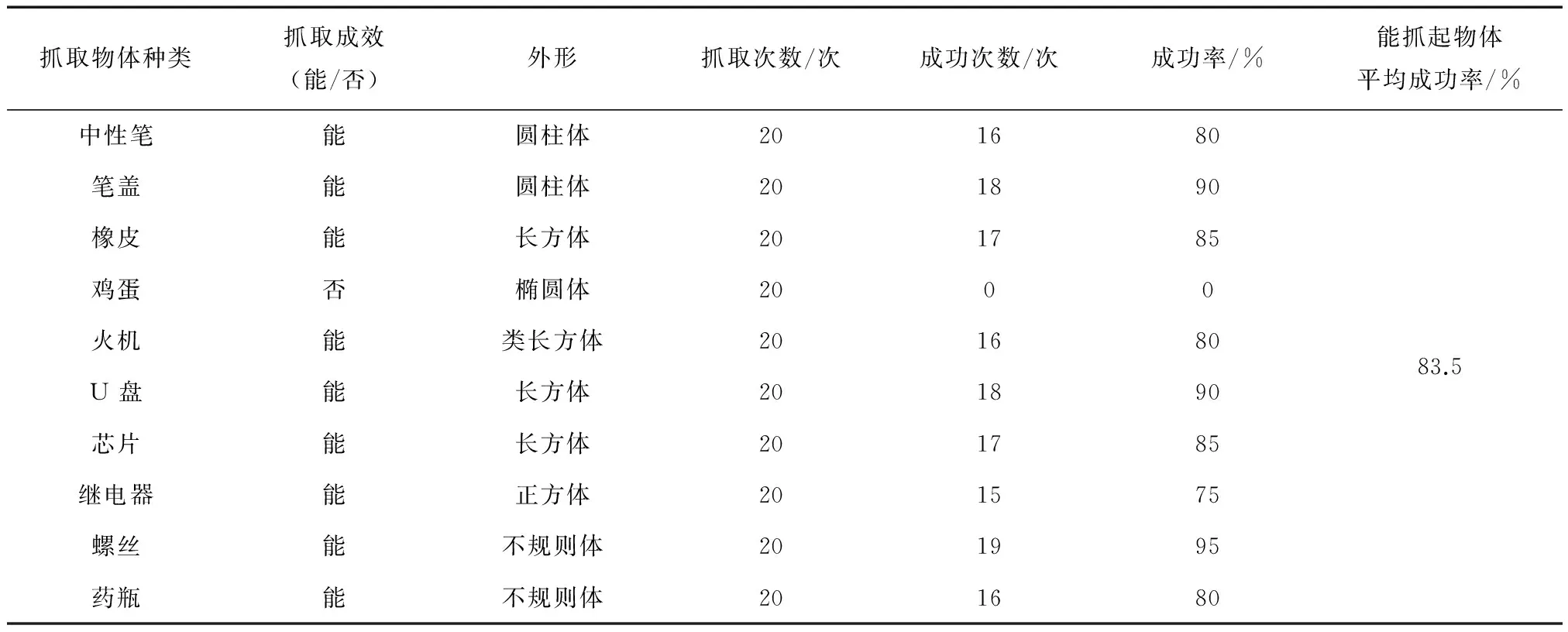
表2 测试数据
本次设计的机械手,通过表2可以看出,新型机械手可以很出色地抓取生活中的物体,且成功率高达83.5%。与普通机械手相比,它具有形状适应性强、控制简单、可靠性高、执行效率高以及成本低等优点。随着时间的推移和技术的进步,基于微小颗粒物真空状态转换的新型机械手无论在硬件方面还是软件方面都将会有长足的发展,使它达到更加适应自动化生产应用的要求,未来将拥有广阔的应用前景。
[1] 巴成宏.浅谈机械手在工业中的应用现状与发展趋势[J].北京农业,2012(6):21-24.
[2] 朱同波.工业机器人结构设计[J].机电产品开发与创新,2012(6):13-15.
[3] 黄贤新.工业机器人机械手设计[J].装备制造技术,2011,11(3):220-221.
[4] 郭洪武.浅析机械手的应用与发展趋势[J].中国西部科技,2012,10(10):34-45.
[5] 马浩源.浅谈工业机械手[J].商情, 2011(12):154.
[6] 曹文祥.工业机器人研究现状及发展趋势[J].机械制造,2011(2):41-43.
[7] 崔秦元.机器人(码垛机械手)发展的前景与应用[J].中国食品工业,2008(10):12-14.
[8] 柳鹏.我国工业机器人发展及趋势[J].机器人技术与应用,2012(5):20-22.
[9] 孙英飞.我国工业机器人发展研究[J].科学技术与工程,2012(12):2913-2917.
[10] MAKINO. Study on common coordinate system by using relative position of other autonomous robot[M].SICE Annual Conference (SICE), 2012 Proceedings of,2012.
[11] WORTMAN T D.Miniature surgical robot for laparoendoscopic single-incision colectomy[J].Surgical Endoscopy,2012.26(3):24-26.
[12] AODRIGUEZ-ANGELES A.Active disturbance rejection control in steering by wire haptic systems[J].ISA Transactions,2013.45(8):78-80.
[13] CLOETE S R.Limitations of feedforward control in multiple-phase steering movements[J].Experimental Brain Research,2009.195(3):89-92.
[14] 穆亚飞.浅谈机械手在机械工业中的应用[J].魅力中国,2011(18):45-46.
[15] 周虹.机器臂控制系统设计[J].微计算机信息,2010(28):70-74.
[16] 陈伟强,张才,许雅敏.新型三自由度拟人并联机器臂及其位置分析[J].轻机械,2012,4(2):7-8.
[17] 李云江.机器人概论[M].北京:机械工业出版社,2011.
[18] 吴晓雷,王淑坤,李大朋.三自由度机械手运动学的研究[J].山东工业技术,2013(11):163-171.
[19] 李响.块状物料机械手抓取式装箱机设计[J].食品与机械,2010(5):109-111.
[20] 白琼燕.电磁继电器的工作原理及其功能[J].科教文汇,2013(6):138-156.
[21] 单祥茹.基础元件介绍-半导体二极管[J].中国电子商情,2011(4):43-78.
[22] 孙娜琳.整流二极管技术及在各领域的应用[J].产业与科技论,2011(23):70-71.
[23] 刘忠山.超快速高压雪崩三极管器件研制[J].微纳电子技术,2009(6):35-37.
[24] 唐泽皓.基于STC单片机的光耦控制研究[J].数字技术与应用,2011(12):22.
[25] 孙德刚.光耦线性化与线性光耦器件的应用[J].现代电子技术,2004(1):28-30.
[26] 黄雪梅,范强,魏修亭.舵机控制用PWM信号的研究与实现[J].博士论坛,2010(2):67-68.
[27] 秦萍.舵机在机器人技术中的应用及编程方法[J].价值工程,2013(32):62-63.
[28] 朱东光.80C196单片机与PC机间的多机数据通信[J].黑龙江大学工程学报,2002(4):134-135.
[29] 曲娜.基于51单片机的舵机控制信号设计[J].中国信息科技,2010(21):138-142.
[30] 程国刚.51单片机应用开发案例手册[M].北京:电子工业出版社,2011.
A new type of mechanical hand based on cystic particles
BAI Jianglan,BAI Shufeng,HUANG Wenfeng,YIN Zhaoshuang
(College of Electronic and Information Engineering, Heilongjiang Institute of Technology, Harbin 150050, China)
The machine hand is one of the important components of robot, but some shortcomings of the traditional machine hand in practical application stay for a long time: traditional universal machine hand is composed of multiple independent humanoid joint multi fingered robot hand the need for complex structure, and a large number of calculations, which leads to the high cost, the corresponding at the same time, traditional general purpose machine hand long response time, which makes the traditional universal machine not only grasping move slowly and can not fully adapt to the shape of an object, or may even damage the target object. This paper is focused on the limitations of traditional universal machine hand, and designs a kind of passive machine model's hand, which is composed of micro particles wrapped in a large number of spherical elastic membrane, the positive pressure and negative pressure air to a combination of fine particulate matter in the modulus of elasticity in loose-free state conversion, so that it can quickly grasp and release the ordinary general machine hand to grab with complex shape objects for which has strong adaptability, simple shape control, high reliability, high efficiency and low cost advantages.
saclike robot arm; micro particles; vacuum; loose-free; elastic modulus
[责任编辑:郝丽英]
TP241
A
1671-4679(2017)05-0042-04
10.19352/j.cnki.issn1671-4679.2017.05.009
2017-04-25
白江兰(1996-),女,本科生,研究方向:电机智能控制.
猜你喜欢
专用汽车(2021年11期)2021-11-18
自动化学报(2019年6期)2019-07-23
今日中国·中文版(2019年1期)2019-01-22
制造技术与机床(2018年11期)2018-11-23
电子制作(2018年1期)2018-04-04
河北农机(2017年12期)2018-01-20
制造技术与机床(2017年4期)2017-06-22
制造业自动化(2017年2期)2017-03-20
发明与创新·中学生(2016年12期)2016-09-10
发明与创新(2016年46期)2016-05-11