
基于模糊逻辑的EHB系统制动意图识别
2017-09-25 02:10杨波,吴翔
自动化仪表 2017年9期
杨 波,吴 翔
(武汉理工大学汽车工程学院,湖北 武汉 430070)
基于模糊逻辑的EHB系统制动意图识别
杨 波,吴 翔
(武汉理工大学汽车工程学院,湖北 武汉 430070)
随着汽车电子技术的发展,线控技术日趋成熟。目前,电子机械制动(EMB)系统尚未成熟,电子液压制动(EHB)系统成为线控制动系统的主力产品。EHB系统取消了制动踏板与制动总泵推杆之间的硬连接,通过传感器测量驾驶员踩制动踏板的参数并传输给电子控制单元(ECU);ECU根据已设定的算法决定助力大小,对驾驶员的制动意图进行识别。基于机械解耦电子液压线控制动系统,提出了一种基于模糊逻辑的驾驶员紧急制动意图识别方法。首先,利用NI-PXI的DAQmx采集卡采集制动踏板的位移,将制动踏板位移对时间求导得到制动踏板速度。然后,将制动踏板位移和速度作为模糊模式识别算法的输入,判断是否为紧急制动意图:如果是紧急制动意图,则制动辅助策略介入;否则制动辅助策略不介入,执行常规制动策略。最后,对汽车在典型工况下的紧急制动意图进行硬件在环,通过对比仿真结果,验证了制动意图识别算法的有效性。该算法为今后EHB系统的制动意图识别提供一定依据,有利于该eBooster系统的产品化。
电子液压制动系统; 模糊模式识别; 硬件在环; 电子控制单元; 制动踏板位移; 模糊辨识模型
0 引言
随着汽车电子技术的发展,汽车线控技术也日趋成熟,先后出现了线控转向系统、油门以及制动系统等[1]。线控制动系统基于线控技术与汽车制动技术,已经成为汽车制动技术的主要发展趋势。其中,线控制动系统又分为电子机械制动(electro mechanical braking,EMB)系统和电子液压制动(electro hydraulic braking,EHB)系统[2]。根据国家法规要求,在常规制动系统失效的情况下,需要后备制动系统,EMB系统对现有车辆的制动系统改动较大,而且建立后备制动系统比较难,因此课题组设计了一套完全机械解耦的EHB系统。eBooster 3D模型如图1所示。
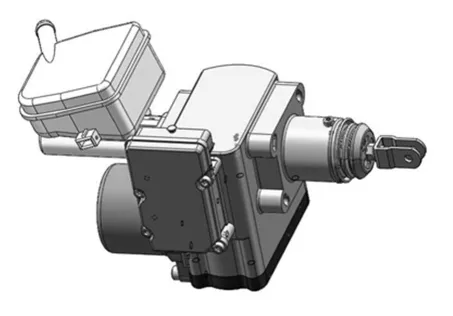
图1 eBooster 3D模型
本系统中,在常规制动模式下,驾驶员施加给制动踏板的踏板力与制动主缸推杆之间是完全解耦的,这时就需要利用传感器监测驾驶员踩制动踏板动作的各种信号,并传输到电子控制单元(electronic control unit,ECU);利用写入的算法,判断驾驶员的实际制动意图,然后根据驾驶员制动意图,控制电机控制器和制动防抱死系统(antilock bake system,ABS)协同工作,调节各个轮缸的压力,实现车辆制动。
调查结果表明,在单车道汽车碰撞事故中,78%的驾驶员没有采用最大的制动踏板力进行制动;在路面突然出现障碍物而引发的紧急制动过程中,47%的驾驶员没有用最大的制动踏板力进行制动[3]。由此可见,如果在驾驶员要实施紧急制动时,汽车制动系统能够识别出驾驶员的制动意图,并实施对应的控制策略,可以缩短制动系统的响应时间,从而有效提高制动安全性[4]。电动汽车的制动能量回收是通过驱动电机给动力电池充电,但是制动能量回收的能量(再生制动力)不足以满足驾驶员的制动能量需求,这时就需要液压制动系统提供额外的制动力。同时整车控制器(vehicle control unit,VCU)也是根据驾驶员的制动意图,对再生制动力和液压制动力进行协调控制[5]。
1 制动意图的辨识
1.1 制动意图的识别参数选择
1.1.1 制动踏板位移
驾驶员踩制动时,制动油压和踏板位移之间有相对确定的关系,即有P=f(s),制动器制动力与制动管路的压强满足如下关系:
(1)
式中:i为各个车轮(1、2、3、4分别代表左前轮、右前轮、左后轮、右后轮);Di为制动轮缸直径;ri为等效制动力作用半径;Ri为车轮直径;ui为摩擦片的摩擦副。
制动强度可以表示为:

(2)
式中:z为制动强度;F为制动力;m为车辆质量;g为重力常数。
由制动强度的表达式可以得到制动力F与s的确定关系。某车型的制动油压和踏板位移之间关系如图2所示。

图2 位移与油压关系曲线
1.1.2 制动踏板速度
试验中,驾驶员根据自己的驾驶习惯,得到了多组常规制动和紧急制动的踏板速度时间曲线。试验得到的制动踏板的位移与速度关系曲线如图3所示。

图3 位移与速度关系曲线
由图3可以看出,两种不同的制动模式分别对应了一个较为明确范围的制动踏板速度,所以可以把制动踏板速度作为制动意图识别的输入参数。
1.1.3 制动踏板力
对驾驶员而言,踏板位移的大小是可以容易地控制的,但是踏板力的大小不好操控。此外,可以很容易地通过安装踏板位移传感器获得踏板位移信号,并且踏板位移信号的间隙较小。相反,因为踏板力传感器的间隙较大,无法获取小踏板力时的踏板力信号,且实时性不高,所以一般不采用制动踏板力信号作为驾驶员制动意图识别的参数[6]。
1.2 制动意图的分类及特征
由于本文模糊辨识器主要用于紧急制动意图的辨识,所以把制动意图分为常规制动意图、紧急制动意图[7]。制动意图分类及特征如表1所示。

表1 制动意图分类及特征
1.3 制动意图的辨识方法
驾驶员制动意图辨识的过程就是利用模糊辨识结合统计学的方法,通过分析大量的实车试验工况数据,找到制动踏板位移、制动踏板速度与制动减速度三者之间的统计学关系。利用LabVIEW自带的模糊系统设计器工具箱建立模糊辨识器,从而实现通过制动踏板位移、制动踏板速度来判断驾驶员的制动需求,进而实现对制动意图的准确、实时辨识。驾驶员制动意图识别流程如图4所示。

图4 制动意图识别流程图
1.4 模糊推理模型的建立
模糊推理模型的建立过程如下。
①对制动踏板位移、制动踏板速度进行模糊化操作,以便对驾驶员制动意图进行识别。设踏板位移为制动踏板位移(brake pedal displacement,BPD),其基本域广义确定为[0,100],将制动踏板位移基本域分为S(small)、M(medium)、B(big)三个等级;制动踏板速度(brake pedal velocity,BPV)的基本域广义确定为[0,200],将基本域同样分为S、M、B三个等级。
②确定模型输入、输出变量的隶属度函数,如图5所示。在实际应用中,常用的隶属度函数为简单的直线型隶属度函数,如三角函数、梯形和单直线型函数,本文选用梯形-三角-梯形隶属度函数。图5(a)、图5(b)、图5(c)分别为模糊控制系统的制动踏板位移输入、制动踏板速度输入和制动模式输出隶属度函数。
③建立模糊控制规则库。表2为本系统模糊控制规则状态表。表2中:Flag为识别出来的制动意图;S状态、M状态为常规制动;B状态为紧急制动[8]。

图5 输入、输出变量的隶属度函数图

FlagBPVSMBSSSSMMMBBBBB
模糊推理结果需要解模糊化后才能进行控制。常用的解模糊方法有最大隶属度法、重心法和加权平均法。本文选用重心法进行解模糊运算,按表2设定的模糊控制规则表,完成模糊辨识器的搭建,保存为可供LabVIEW中控制与仿真模块的模糊系统设计器调用的FS格式[9]。利用模糊系统设计器中的测试系统模块,生成制动踏板位移、制动踏板速度和制动模式的三维关系图,改变制动踏板位移和制动踏板速度的输入值。模糊控制器采用LabVIEW附加模糊工具包实现。控制器所用函数主要有多输入单输出(multi input single output,MISO)模糊控制函数、模糊隶属度函数和模糊控制规则载入函数(fuzzy control rules loading function,FCRLF)。解模糊方法采用重心法。模糊控制器将制动踏板速度和制动踏板位移捆绑一个二维数组,并将其作为系统的输入;用模糊控制规则载入函数将设定的模糊规则导入到模糊控制函数中,并分析系统的输入,得到系统的输出;再通过标定的子VI,得到对应的输出。在模糊控制器主程序中,模糊控制器以子VI的形式出现[10]。
2 硬件在环仿真及结果分析
2.1 硬件在环
本文通过NI-DAQmx板卡联合SCB-68接线盒,采集制动踏板上角位移传感器信号。采用LabVIEW对角度进行标定得到实际的制动踏板位移,然后将制动踏板位移对时间求导得制动踏板速度,最后将制动踏板位移和制动踏板速度构建一个数组,输入到模糊辨识器。
当Flag=0时,按照常规制动,由踏板位移特性曲线得到目标制动压力,然后通过控制器局域网(coutroller area network,CAN)把目标制动压力传送给EHB系统的电机控制器,通过控制电机来推动制动总泵活塞推杆,建立液压制动力;当系统检测到Flag=1时,判断为紧急制动,通过CAN将最大目标制动压力直接发送给电机控制器,快速建立液压。
2.2 仿真结果分析
本文设计了两组硬件在环试验,试验结果如图6所示。

图6 硬件在环试验结果
第一组试验,没有模糊辨识器。图6(b)中的试验1制动总泵液压制动力随着图6(a)中的试验1制动踏板位移的增加而增加,而且表现出一个近似线性的关系。决定制动总泵液压力大小的是制动踏板位移,与制动踏板速度无关。第二组试验,有模糊辨识器。在和第一组试验类似的踏板位移输入的情况下,制动总泵液压响应曲线明显不同,图6(b)中的试验2制动总泵液压制动虽然也是随着图6(a)中的试验2制动踏板位移的增加而增加。但是在当制动踏板位移和制动踏板速度都比较大时,图6(b)中的试验2制动总泵液压制动力建立的速度明显快于图6(b)中的试验1,所以能在更短的时间内,达到最大制动压力。因此在紧急制动情况下对驾驶员意图的识别,减少了制动的响应时间,进一步缩短了制动距离,因而降低了事故发生的可能性,提高了驾驶的安全性。
3 结束语
本文提出了一种基于模糊逻辑EHB制动系统紧急制动意图识别方法,首先将制动踏板和制动踏板的变化量模糊化,输入给模糊辨识器;模糊辨识器读取制定的模糊识别规则,对结果进行去模糊化,对驾驶员的紧急制动意图进行识别。对乘用车进行了典型工况下紧急制动过程的仿真,仿真结果验证了模糊辨识器的有效性。通过分析硬件在环仿真结果可知:在本套EHB系统中使用该模糊辨识器,能有效地识别驾驶员的紧急制动意图,缩短紧急制动情况下液压制动力建立的时间,提高了制动的安全性。
[1] AKIHIRO O,AKIRA S,TATSUSHI T,et al.Development of regenerative system for hybrid vehicle[J].SAE Papers,1999(10):62.
[2] 杨万庆.电子液压制动系统EHB综述[J].城市车辆,2007(6):43-45.
[3] 康梅.东风标致307紧急制动辅助系统[J].汽车维修技师,2005(12):22-24.
[4] 孙磊.HEV驾驶员制动意图识别及控制算法研究[D].长春:吉林大学,2012.
[5] 张元才,余卓平,徐乐,等.基于制动意图的电动汽车复合制动系统制动力分配策略研究[J].汽车工程,2009,31(3):244-249.
[6] 王英范,宁国宝,余卓平.乘用车驾驶员制动意图识别参数的选择[J].汽车工程,2011(3):213-216.
[7] 孙逸神.基于模糊逻辑的制动意图离线识别方法研究[J].北京汽车,2009(6):21-23.
[8] 刘磊,刘树伟.驾驶员制动意图辨识的方法研究[J].农业装备与车辆工程,2015(11):27-30.
[9] 张玉洁.基于CarSim的电动助力转向系统仿真与硬件在环验证[D].合肥:合肥工业大学,2015.
[10]张文广.基于LabVIEW的轿车ABS控制策略仿真研究[D].西安:长安大学,2013.
IdentificationofBrakingIntentionofEHBSystemBasedonFuzzyLogic
YANG Bo,WU Xiang
(School of Automotive Engineering,Wuhan University of Technology,Wuhan 430070,China)
With the development of automotive electronic technology,the technology of wire control technology has become more and more mature.Because the electro mechanical braking (EMB) system is not yet mature enough,so the electro hydraulic braking(EHB) has become the major product of the wire controlled brake system.In EHB system,the hard connection between the brake pedal and the brake master cylinder push rod is eliminated; the parameters related to the actions of driver are measured by sensor and sent to the ECU.According to the established algorithm,the force aided is decided by ECU,while it is necessary to identify the intention of driver.Based on the design of the mechanical decoupling electro hydraulic wire collected control system,the identification method based on fuzzy logic is proposed.Firstly,the displacement of brake pedal is collected by using DAQmx acquisition card of NI-PXI,and the time derivative of the brake pedal is conducted to obtain the velocity of the pedal.Then,the displacement and velocity of the pedal are input to the fuzzy identification algorithm to judge if it is the intention for emergency braking or not,thus to select if the braking aids strategy will be involved or not.Finally,the emergency braking intention of the vehicle under the typical operating conditions is carried out in the hardware,and the simulation results are given to verify the effectiveness of the algorithm.The method provides a basis for the identification of braking intention of EHB system in the future,and is conducive to the production of the eBooster system.
Electro-hydraulic braking (EHB) system; Fuzzy pattern recognition; Hardware in the loop; Electronic control unit; Brake pedal displacement; Fuzzy recognition model
TH86;TP273
: A
10.16086/j.cnki.issn1000-0380.201709006
修改稿收到日期:2017-03-22
杨波(1975—),男,博士,副教授,主要从事汽车动力学方向的研究。E-mail:yangbo92@126.com。
猜你喜欢
法律方法(2022年2期)2022-10-20
福建基础教育研究(2022年4期)2022-05-16
法律方法(2021年3期)2021-03-16
重型机械(2020年2期)2020-07-24
黄河之声(2019年23期)2019-12-17
汽车实用技术(2019年17期)2019-09-21
汽车零部件(2019年7期)2019-08-16
民用飞机设计与研究(2019年2期)2019-08-05
凿岩机械气动工具(2017年3期)2017-11-22
教育界·下旬(2016年4期)2016-11-19
