
升降横移式立体车库冗余控制系统设计
2017-09-25 02:10盛强
自动化仪表 2017年9期
盛 强
(湖州职业技术学院机电与汽车工程学院,浙江 湖州 313000)
升降横移式立体车库冗余控制系统设计
盛 强
(湖州职业技术学院机电与汽车工程学院,浙江 湖州 313000)
随着城市化的不断推进及汽车保有量的逐年增加,立体车库成为解决城市停车难问题的首要选择,而其可靠性和安全性关系到人身及财产安全。对立体车库控制系统的高可靠性和高安全性的要求进行了调查研究,采用三菱FX3U系列PLC和威纶通触摸屏,设计了一种基于4层9车位升降横移式立体车库的PLC冗余控制系统。控制系统能够人为强制任一PLC进行停取车控制,也可在非强制情况下,特别是在停取车过程中系统发生硬件等故障时,自动切换PLC进行停取车的冗余控制。对控制系统的硬件组成、PLC冗余控制原理和存取车控制流程进行了详细论述。结果表明,该升降横移式立体车库冗余控制系统具有结构简单、硬件成本低及运行安全可靠等优点,且人机交互界面易于操作,能够有效地解决立体车库可靠性和安全性较差等问题。
立体车库; 升降横移; PLC; 通信; 冗余控制; 可靠性; 安全性
0 引言
近年来,私家车拥有量的日益增长,再加上地面、地下停车位数量的严重不足,造成了占道、占用绿地、甚至占用消防通道停放等非法停放现象[1],特别是在商业广场、政府以及住宅等配套停车场更是“一位难求”[2]。立体车库,特别是升降横移式立体车库在解决城市停车难问题上发挥着重要的作用,但是立体车库的可靠性和安全性关系到人和轿车的安全。当控制系统发生故障可能会造成严重的后果,因此,提高其可靠性和安全性十分迫切。
目前,升降横移式立体车库主要采用单一PLC进行控制,通过控制升降电机和横移电机实现车辆的停放。为保障立体车库运行的可靠性和安全性,王虎军等人对控制系统进行了可靠性分析研究,其中通信总线子系统平均无故障时间只有30 h[3],远远低于其他子系统;为了提高通信总线的可靠性,费明利等人采用双总线冗余结构[4],虽然增强了通信总线的可靠性,但是该系统利用2个PLC分别控制电梯单元和车位横移单元,一旦其中一个PLC发生故障,会导致整个系统不能正常运作。
本文以4层9车位的升降横移式立体车库为控制模型,采用FX3U系列PLC为控制核心,结合威纶通触摸屏,设计了一种兼具单机控制和自动冗余控制的升降横移式立体车库自动控制系统。
1 系统结构及车位调度
升降横移式立体车库通过控制各个载车板的升降和/或横移运动来实现车辆的多层停放[5-6]。其中:1层载车板只能进行横移运动;4层载车板只能进行升降运动;2、3层载车板既可进行横移运动,又可进行升降运动。
当底层101、103号车位存取车辆时,可直接存取车辆;当中间层、顶层车位存取车辆时,首先必须把其正下方车位通过载车板的升降运动和/或横移运动腾出1个下降通道,再将该车位载车板下降至1层,然后再进行车辆存取,完成存取车辆后通过升降运动复位该载车板。4层9车位立体车库的车位结构图如图1所示。

图1 车位结构图示意图
2 冗余控制系统设计
升降横移式立体车库控制系统由2个互为备用的FX3U系列PLC、威纶通MT8051iP触摸屏、光电传感器、限位开关等构成。冗余控制系统硬件框图如图2所示。由2个PLC构成的冗余控制系统作为整个控制系统的核心,通过利用FX3U-485BD通信板组成N∶N网络通信系统,实现PLC之间的信息交互;触摸屏作为控制系统与外界进行人机交互的控制界面,实现车位选择、存取车选择及报警显示等功能,其与PLC编程口之间通过RS-485通信采集信号。
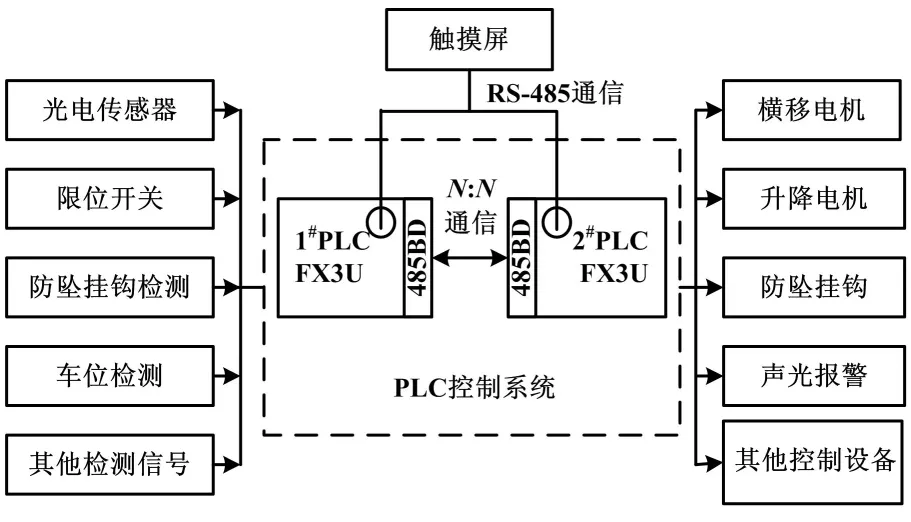
图2 冗余控制系统硬件框图
控制系统可通过外部旋转开关实现单机控制或冗余控制模式之间的模式切换。在冗余控制情况下,1#PLC与2#PLC之间进行N∶N网络通信,完成控制数据的实时交换。1#PLC默认处于控制状态,触摸屏与1#PLC进行通信,实现操作控制及报警显示;而当1#PLC发生硬件故障或通信总线故障时,2#PLC取代1#PLC取得控制权,通过切换通信总线通道实现2#PLC与触摸屏之间的通信。控制系统相关器件功能如表1所示。

表1 控制系统相关器件(信号)功能
3 控制算法设计
3.1 冗余控制算法
三菱FX3U系列PLC之间的N∶N网络通信符合RS-485通信标准,通信波特率固定为38 400 bit/s,2个站之间的通信链接时间为34 ms,能够满足立体车库冗余控制通信需求。N∶N网络链接模式采用模式2实现2个PLC之间的通信,即位软元件为每站64点,字软元件每站8点[7]。
①通信故障检测。利用特殊辅助继电器M8183、M8184分别检测N∶N网络通信中1#PLC(0#主站)和2#PLC(1#从站)的通信状态是否正常,通信发生错误时为ON。
②PLC硬件故障检测。利用特殊辅助继电器M8061检测PLC硬件是否正常,发生错误时为ON。
③PLC冗余切换控制。在默认冗余切换控制模式下,1#PLC利用N∶N网络通信把M8183、M8061和M8013的信号状态传送至2#PLC。2#PLC接收到信号后判断1#PLC通信、硬件是否出错,如检测有故障,2#PLC取代1#PLC取得控制权并切换与触摸屏之间的通信线路,实现PLC冗余切换控制。2#PLC通信、硬件故障检测同理。
④PLC输出点冗余控制。在默认冗余切换控制模式下,1#PLC取得控制权,完成对立体车库的控制。在无故障发生的情况下,1#PLC通过N∶N通信实时发送PLC各个输出点状态至2#PLC,如将载车板A横移电机左移、右移和停止状态利用M1003~M1005传送至2#PLC,其他载车板状态同理,同时1#PLC实时接收2#PLC的输出点状态并保持,用于当PLC发生切换时的输出点状态保持;当发生故障时,2#PLC取得控制权,1#PLC延时复位所有输出点。2#PLC取得控制权时,控制方式同1#PLC。冗余控制算法流程图如图3所示。
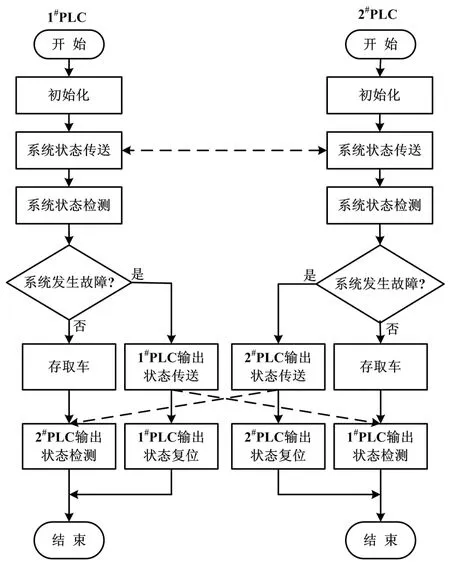
图3 冗余控制算法流程图
3.2 存取车控制算法
在升降横移式立体车库存取车辆过程中,需根据空位位置及存取车辆需求自动计算最优的下行通道[8-9]。当载车板光电检测开关未接通,表明载车板上没有车辆停放,只能进行存车操作;反之,只能进行取车操作。
存车流程如下:当底层载车板A、B未停放车辆时,则可直接进行存车操作;若底层没有空闲载车板,则需要自行选取载车板并存车,控制系统根据所选载车板自动判断其下方是否有空位,如有空位则建立下行通道,载车板下降;如其下方有载车板,则需要通过横移电机对其进行左移或右移,重新建立下行通道,然后载车板下降,完成存车操作,最后在存车操作完成后,手动复位该载车板。
取车流程如下:当车辆停放于底层载车板A、B时,则可直接进行取车操作;否则,需选取相应的载车板进行取车操作,具体流程同存车流程,取车操作完成后,载车板上升复位。
3.3 触摸屏操作界面
为了使立体车库的存取车操作更为方便、直观,控制系统采用威纶通MT8051iP触摸屏,其带有RS-485接口,通过中继器可实现与1#PLC、2#PLC之间通信线路的切换,能够满足控制系统冗余控制要求。
触摸屏操作界面实现功能如下。
(1)在手动控制模式下,手动操作实现载车板升降、横移等控制功能。
(2)在自动控制模式下,配合单机/冗余切换开关,实现单机控制/冗余控制之间的切换。①单机控制模式:通过切换开关强制1#PLC或2#PLC参与控制,触摸屏与取得控制权的PLC之间建立通信,并实现存取车控制;②冗余控制模式:在未强制任何PLC的情况下,触摸屏默认与1#PLC通信并参与控制,当1#PLC发生故障后,触摸屏在切换通道后与2#PLC通信,并实现存取车控制。
(3)报警功能。配合声光报警器实现报警信息的实时显示,如运行超时报警、松链报警、超限报警等。
4 结束语
本文设计了一种规模小、硬件成本低、安全性和可靠性高的升降横移式立体车库冗余控制系统,系统以2个三菱FX3U系列PLC为核心,利用N∶N网络通信实现2个PLC之间的冗余控制。该系统具有手/自动控制功能,且在自动控制功能下,能够单独强制任一PLC进行控制,也可实现冗余控制。试验结果表明,在冗余控制模式下,本系统能够在故障发生时自动切换PLC控制器,实现存取车流程的无缝切换控制,能够有效且可行地解决现有立体车库控制系统安全性和可靠性较差的问题。
[1] 何聪,肖素梅.电梯式立体车库升降系统设计与安全研究[J].西南科技大学学报,2014,29(4):82-86.
[2] 张桂香,耿长清.基于PLC的升降横移式立体车库自动控制[J].自动化仪表,2013,34(7):35-37.
[3] 王虎军,马殷元,耿浩.垂直升降式立体车库的安全可靠性分析与设计[J].中国安全科学学报,2015,25(8):76-80.
[4] 费明利,谢坚,谭青.电梯式立体车库控制系统的可靠性研究[J].起重运输机械,2003(12):48-50.
[5] 陆波,王荣扬.基于PLC的升降横移立体车库控制系统设计[J].自动化仪表,2016,36(7):22-25.
[6] 姜艳华,连勇.基于PLC的立体车库自动控制系统[J].计算机系统应用,2011,20(5):21-24.
[7] 马红麟.基于PLC控制的多层立体车库的研究与设计[J].制造业自动化,2009,31(3):97-100.
[8] 张芳芳,梁飞,朱敏哲.基于排队论的升降横移立体车库控制策略研究[J].计算机仿真,2013,30(1):208-211.
[9] 霍沛,胡勇.基于PLC的立体车库自动控制算法的设计及应用[J].四川理工学院学报(自然科学版),2015,28(1):21-24.
DesignoftheRedundantControlSystemfor3DLiftandTransverseParkingGarage
SHENG Qiang
(School of Faculty of Electromechanical & Automobile Engineering,Huzhou Vocational & Technical College,Huzhou 313000,China)
With the continuous advance of urbanization and the car ownership increased year by year,the 3D parking garage has become the primary choice to solve the difficult problem of city parking,and its reliability and safety are related to personal and property safety.The requirements of the high reliability and high safety for the control system of 3D parking garage are investigated,and a redundancy PLC control system is designed by adopting Mitsubishi FX3U series PLC and Weinview touch panel,for the 4-storey 9-parking position 3D lifting and reversing garage.The control system can manually force any of the PLCs for car parking and car collecting,and in non-force condition,especially when hardware failure occurs,the system also can automatically switchover the PLCs for redundant control of car parking and car collecting.The hardware composition of the control system,the PLC redundant control principle,and car parking/collecting process are described in detail.The results show that the redundant control system features simple structure,low hardware cost,and safety and reliable operation.The HMI is easy to operate and can effectively and feasibly solve the problems such as the poor reliability and safety of the three-dimensional parking garage.
3D parking garage; Lift and transverse; PLC; Communication; Redundant control; Reliability; Safety
TH73;TP23
: A
10.16086/j.cnki.issn1000-0380.201709007
修改稿收到日期:2017-03-30
湖州市公益性技术应用研究基金资助项目(2015GZ02)
盛强(1981—),男,硕士,讲师,主要从事工业网络通信及智能控制方向的研究。E-mail:437162485@qq.com。
猜你喜欢
电机与控制应用(2022年4期)2022-06-27
装备制造技术(2019年12期)2019-12-25
中国特种设备安全(2019年4期)2019-05-20
电子制作(2018年19期)2018-11-14
知识就是力量(2018年7期)2018-07-11
北京航空航天大学学报(2017年1期)2017-11-24
电子制作(2017年2期)2017-05-17
北京信息科技大学学报(自然科学版)(2016年5期)2016-02-27
舰船科学技术(2015年8期)2015-02-27
中国航海(2014年1期)2014-05-09
