VSC-HVDC串并联型D-PMSG风电场机组功率—电压协调控制
2017-09-15 12:04张文娟彭婧荣飞
电机与控制学报 2017年8期
张文娟, 彭婧, 荣飞
(1.长沙学院 电子信息与电气工程系,湖南 长沙 410002; 2.湖南大学 电气与信息工程学院,湖南 长沙 410082)
VSC-HVDC串并联型D-PMSG风电场机组功率—电压协调控制
张文娟1, 彭婧2, 荣飞2
(1.长沙学院 电子信息与电气工程系,湖南 长沙 410002; 2.湖南大学 电气与信息工程学院,湖南 长沙 410082)
针对串并联型D-PMSG风电场中同一串联簇机组在不同风速下最大功率追踪控制存在过电压、过调制问题,分析基于柔性直流输电的串并联型D-PMSG风电场机组的运行特性,提出一种适用于该拓扑型风电场机组的功率—电压协调最大功率追踪控制方法,并探讨直流母线电压上限值的设定原则。该方法不仅可以将同一串联簇中其他各机组直流母线电压都钳制在安全范围内,还减少限压期间下的机组的弃风。搭建相应的仿真模型,仿真结果表明所提出的方法可确保各机组在安全范围内寻找最佳功率点。
柔性直流输电;串并联拓扑;功率—电压协调控制;直流母线电压上限值
0 引 言
柔性高压直流输电[1-2](voltage source converter-high voltage direct current,VSC-HVDC)克服了传统传输方式传输距离短、传输容量小等缺点而逐渐成为海上风电远距离传输优选方式。为更好将之与海上风电场对接,有学者提出了直流汇集式[3-4]海上风电场与柔性直流输电技术的结合的方案,该方案被证明是实现海上风电场容量的扩充及风能远距离传输最有潜力的方案。
直流汇集式风电场的拓扑结构主要有并联拓扑、串联拓扑、串并联拓扑[5-7]。其中,并联拓扑虽然结构简单,但由于单台机组出口电压等级低,机组直流汇集后仍需要大容量的DC-DC变电站抬升直流母线电压以达到直流输电电压的等级,这种方案工程难度大、成本高。串联拓扑将所有的机组在直流侧串联使直流母线电压达到直流输电电压等级,省去了DC-DC升压模块。可串联型风电场具有容量扩充难,容错性能差的缺点,单台机组发生故障会导致整个串联簇机组运行受影响。相比于串联拓扑与并联拓扑,串并联拓扑解决了这两种拓扑型风电场存在的问题,并显示出诸多的优点。但串并联拓扑中,同一串联簇中机组间的耦合特性增加了系统的控制难度。同一串联簇中机组处于不同风速时,串联簇中各机组的直流母线电压值随其捕获的功率变化,因此,采用传统的MPPT控制,同一串联簇中处于高风速下机组存在过电压的问题,而处于低风速的机组存在过调制的问题。
针对上述问题,文献[8-9]提出在机组直流侧装设DC-DC变换器,通过DC-DC变换器与机侧AC-DC变流器协调电压限幅控制,避免串联簇中部分机组直流母线电压过高。文献[10]为减少系统硬件投入,针对不装设DC-DC变换器的系统提出改进的转速变步长爬山最大功率追踪算法,并在各机组直流母线设定上下限值,但由于直流电压超出下限值的机组输出的功率在当前风速下已经为最大值,无任何储能设备时直流母线电压无法抬升,所以通过设定下限值并没有解决过调制的问题。此外,上述文献均没有考虑直流母线电压限值对发电机过调制的影响,也没有给出直流母线电压限值设定依据。
本文结合串联簇中机组运行特性,提出了适用于功率—电压协调最大功率追踪控制方法,并从过电压与过调制两方面出发,合理的设定了控制算法中直流母线上限值。当串联簇中机组运行于特殊风况时,通过电压控制调节该串联簇中风速最高机组输出功率,进而调节低风速运行机组输出功率占该串联簇输出总功率的比例,使低风速下运行机组的直流母线电压钳制在安全范围。最终,有效地解决了特殊风况下存在的过电压与过调制的问题。
1 风电场拓扑结构及运行特性分析
1.1 风电场拓扑结构
本文设计的直流汇集式串并联型风电场的拓扑如图1所示,Y台机组于直流侧串联组成一个串联簇,相同的X列串联簇并联后将X×Y台机组输出的电能经VSC-HVDC系统传输,最后经MMC多电平换流站逆变并网。串联簇中各机组直流母线电压为Ux,y,输出功率为Pex,y,串联簇端口电压为Udc,Udc的稳定由MMC多电平换流站控制。
相比于传统串联结构,新型拓扑结构取消了各机组直流侧的DC-DC模块。此外,为确保故障机组安全隔离检修,每台机组装设旁路开关与泄放电路,旁路开关将故障机组从串联簇中隔离切除后,通过泄放电路使直流母线降压。

图1 串并联拓扑结构图Fig.1 Structure of series-parallel wind farm
1.2 串联簇中机组运行特性
设图1中每台风力机的参数相同,第x列串联簇中所有机组输出的总功率为
PS=UdcIdc=Pex,1+Pex,2…+Pex,y…+Pex,Y。
(1)
式中:Idc为串联支路电流;Pex,1、Pex,2…Pex,Y为同一串联簇中各台机组输出的电磁功率。
第x列串联簇中第y台机组输出的电磁功率为
Pex,y=Ux,yIdc。
(2)
结合式(1)与式(2),在同一串联簇中,由支路电流相等得

(3)
由式(3)可知,串联簇中机组直流侧电压Ux,y随自身捕获功率占整个串联簇输出功率比例变化。
本文以相同型号的4台机组组成的串联簇为例,分析了串联簇机组的动态运行特性,如图2所示。

图2 串联簇中机组运行特性分析Fig.2 Working-point of series-paralled D-PMSG with conventional algorithm
设该拓扑中,初始状态下,四台机组处于相同的风况下即捕获的功率相同,各机组直流侧电压也相等,工作点重合于A点。下一状态时,串联簇中第四台机组风力机风速减小,Pex,4随之减小。Pex,4减小使Pex,1、Pex,2、Pex,3占串联簇输出总功率的比重增大,直流母线电压Ux,1、Ux,2、Ux,3增大,第一、二、三台机组工作点转移至B点; 而Pex,4减小使Pex,4占总功率的比重减小,其直流母线电压Ux,4减小,第四台机组工作点转移至C点。
结合图2可知,同一串联簇中各机组所处风速差异较大时,将导致串联簇部分机组直流母线电压过高发生过电压击穿故障,另一部分机组因直流母线电压过低而导致过调制,随之引发机组谐波含量升高、风机振动等问题。
2 串联簇中机组功率与电压协调控制策略
综上分析, 对于串并联拓扑型直流风电场的永磁同步发电机组而言,为避免机组过电压、过调制的问题。本文对永磁同步发电机组的传统控制方法从以下两方面进行改进:
1)改进MPPT算法,实现功率—电压协调控制,即保证机组在安全范围内寻找最佳工作点。结合式(2)与式(3)可知,功率—电压的协调控制可通过调节Pex,y或Idc实现,为使各运行状态下,机组在MPPT状态与限压控制状态更好切换,本文功率—电压的协调控制通过调节Pex,y实现。
2)针对功率—电压协调控制,设定合理的直流母线电压限值。因为直流电压超出下限值的机组输出的功率在当前风速下已经为最大值,所以此无任何储能设备时直流母线电压无法抬升,通过设定下限值并没有解决过调制的问题。本文从过电压与过调制两方面出发,提出通过设定合理的直流母线电压上限值,结合功率—电压协调控制,调节高风速下机组输出的功率,进而调节低风速运行机组输出功率占该串联簇输出总功率的比例,钳制其直流母线电压,避免过电压与过调制。
2.1 直流母线上限值设定分析
本文对各运行状态下串联簇中输出功率最大及最小的机组进行研究,并根据机组直流母线电压Ux,y存在最大值Ux,max与最小值Ux,min的状态及条件,设定合理的上限值Umax。
设串联簇中机组输出功率的最大值与最小值为Pex,max、Pex,min,且PN≥Pex,max≥Pex,min≥Pcut-in(PN为机组额定功率,Pcut-in为机组运行于切入风速时输出的功率)。输出电磁功率为Pex,max、Pex,min机组对应的直流母线电压分别为Ux,max ,Ux,min。对于确定的Pex,max、Pex,min,串联簇存在以下3种运行形式:
1)簇中Y台机组输出的功率均相等,此时机组直流母线出口电压均相等,则

(4)
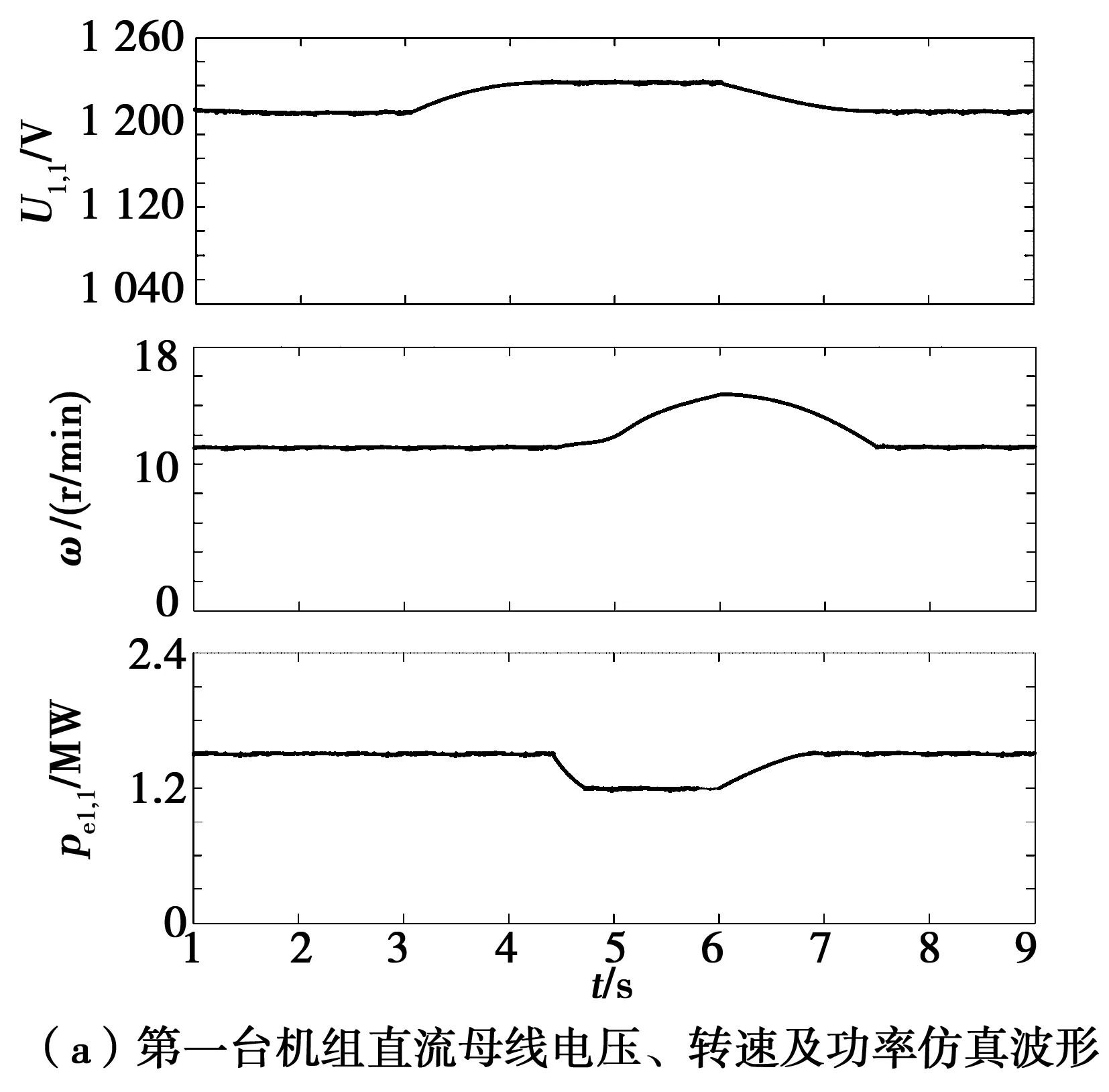
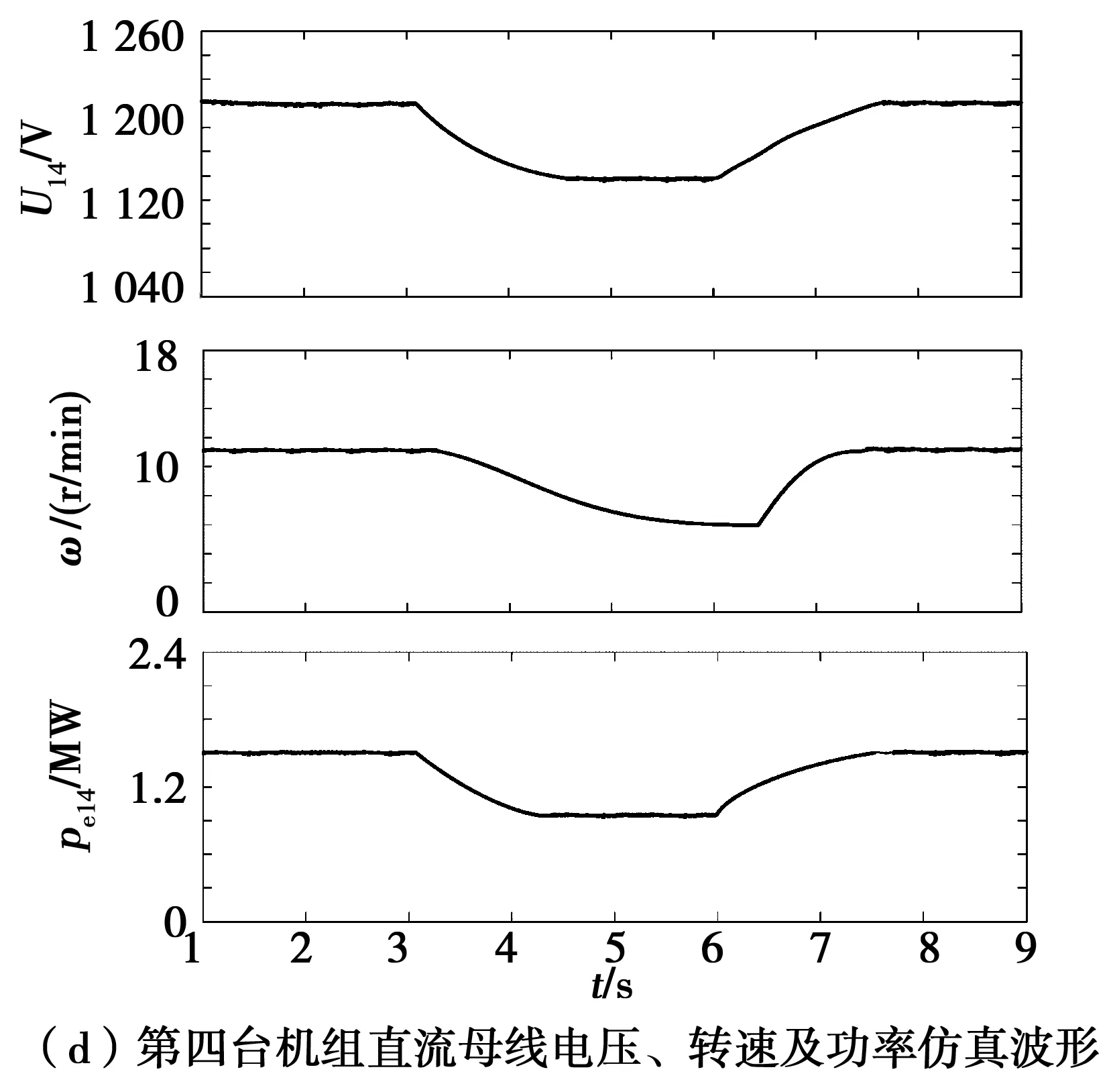
2)簇中n(1≤n (5) 3)簇中n(1≤n (6) 系统以第1种形式运行时,串联簇中各机组端电压相等,不存在部分机组过电压而部分机组过调制的问题。所以,主要研究第2与第3种运行形式,对比第2)与第3)种运行形式,易知PS1>PS2,则由式(5)与式(6)可知,当串联簇以第二种形式运行是输出功率最小的机组母线电压最低。 但以第二形式运行时,n取值的不同也会影响Ux,min的大小,式(5)也可表示为 (7) 将式(2)带入式(7)可得 (8) 式(8)表明,机组直流母线电压为最小值Umin除了与运行状态有关,还与处于低风速机组的台数有关。由于式(8)对n的导数大于零,所以Y台机组组成的串联簇,当其中1台机组以最小功率Pex,min运行,其他Y-1台机组以最大功率Pex,max运行时,这一台机组直流母线电压为最小值Umin。 要保证机侧整流器采用SVPWM调制时处于线性可调制状态,机组直流母线电压Ux,y与发电机线电压幅值Ugx,y之间必须满足以下关系[11] m×Ux,y≥Ugx,y。 (9) 式中m为调制比,0.8≤m≤0.95。 为避免机组发生过调制,以Umin=Ugx,y/m作为系统安全运行的临界状态,并将其带入式(8)可得直流母线最大值即上限值Umax为 (10) Y台机组均正常运行的串联簇,按式(10)可求出相应的直流母线上限值Umax,通过限压控制,确保机组直流母线电压在安全范围内。但式(10)得到的母线电压上限值Umax是以Y台机组均正常运行为条件,在运行过程中,如果同一串联簇中k台机组发生故障从串联簇中切除时,母线电压上限值Umax为 (11) 根据式(11)可知,当同一串联簇中退出运行的机组数k不断增大时,不仅会提高整流器调压范围的要求,还会增大系统的安全隐患。因此,同一串联簇中k取值都存在最大值Kmax,即当退出运行的机组数k超出一定范围时,整个串联簇会被切除。 PWM整流器中,电容量的计算是在满足直流电压抗扰性能要求的条件下进行的[12],最大值Kmax确定时,直流母线电容的取值存在唯一值。所以,当退出运行的机组数k在允许范围以内时,按式(11)设定直流母线电压的上限值Umax可保证任意运行状态下,不会出现过调制及过电压击穿。 2.2 机组功率—电压协调控制 按照是否依赖风场数据,最大功率追踪控制方法可以分为已知给定法、黑箱法、混合控制法[13]。但大功率海上风电场机组转动惯量较大,黑箱法和混合控制法难以适用,目前大功率机组主要采用已知给定法实现最大功率追踪。已知给定法中功率信号反馈法具有较高的实用价值,传统的功率信号反馈法[14]要先测量出的风力机当前转速,再根据风力机最大功率曲线获取该转速下风力机输出的最大功率Pm,并将Pm作为发电机功率给定,通过调节发电机功率以调节发电机转速ωr获取最大功率。 因为,串并联型结构的海上风电场采用传统的功率信号反馈法时,存在过电压、过调制的问题。结合限压值的设定,本文对传统的MPPT控制进行改进,以适应串并联型海上风场机组,改进后的控制框图如图3所示。 图3 串并联拓扑机组控制框图Fig.3 Control diagram of series-paralled D-PMSG 该算法在电压限幅期间, PMSG输出的电磁功率Pex,y被限制,引起 PMSG的机械功率Pmx,y与电磁功率Pex,y的不平衡,直接采用变桨调节会增加“弃风”。鉴于发电机转子具有4%~8%[15]的增速范围,所以本文风力机采用转子储能与风力机变桨协调控制方式,其控制原理图如图4所示。实时监控转子转速ωr,在转子超过限制值ωrth时启动变桨控制及时限制转速。该方法既可减少“弃风”,又能防止 PMSG转速波动及过速保护动作。 按照图1所示拓扑结构,利用Matlab/SIMULINK搭建了同型号12台D-PMSG机组构成的4串3并型风电场的仿真模型。电容量的计算以同一串联簇中4台机组最多允许1台机组退出运行为条件,其他参数如表1所示。 表1 仿真模型主要参数Table 1 Parameters of simulation system 以第一列串联簇为例,分别通过以下两种运行状态对本文所提出的方法进行验证。情形一:串联簇中4台机组均正常运行,且4台机组在前2 s都以11 r/min的转速运行,第3 s时第4台机组转速突变为9 r/min,第6 s时4台机组转速均恢复为11 r/min。情形二:串联簇中第1台机组退出运行,且前2 s 3台机组都以6 r/min的转速运行,第3 s后第4台以16 r/min运行,第6 s后第3台机组转速突变为11 r/min。 图4为按情形一所述状态运行时系统的仿真波形,其中图4(e)为该运行状态下系统传输母线电压Udc的仿真波形,Udc的稳定由网侧MMC变流器控制,整个运行状态下Udc维持在4 800 V。 图4(a)、(b)、(c)、(d)为该运行状态下串联簇中四台机组直流母线电压、转速及输出功率的仿真波形。由图可知,1~3 s内,由于各机处于相同的转速,各机组输出的电磁功率相等,直流母线电压也均为1 200 V。第3 s时,第四台机组所处环境的风速下降使Pe1,4逐渐减小,随着Pe1,4的减小,Pe1,4占该串联簇输出总功率比例逐渐减小,而其他三台机组输出功率占总功率的比例不断上升,因此U1,4逐渐减小,U1,1、U1,2、U1,3则不断增大。当U1,1、U1,2、U1,3升高至1 273 V左右后系统进入限压控制,由图可知,电压限幅期间,Pe1,1、Pe1,2、Pe1,3减小,即通过限制Pe1,1、Pe1,2、Pe1,3,使Pe1,4在后期减小过程中U1,4被钳制至980 V左右维持不变。限幅期间Pe1,1、Pe1,2、Pe1,3被限制,引起转子转速上升并储存部分能量。第5 s时,第四台机组转速恢复与其他三台相等,随着第四台机组输出的功率Pe1,4增加,第一、二、三台机组退出限幅期,转子释放之前储存的能量,Pe1,1、Pe1,2、Pe1,3快速恢复至初始状态。直流母线电压还原至初始状态。 图4 以情形一运行时仿真结果Fig.4 Simulation results for Case 1 通过图4的仿真结果可以看出,第四台机组以9 r/min的转速运行时,输出的功率为900 kW,其他三台机组以11 r/min运行,输出的功率均为1 200 kW。采用传统的控制,第四台机组直流母线会减小至800 V,对于额定电压为660 V的机组,机组会发生过调制振荡。而采用本文所述方法,可以限制其直流母线电压的降低。 图5为以情形二运行时的仿真波形,1~3 s内,三台机组处于相同的风速,输出的电磁功率相等,直流母线电压均为1 600 V。第3 s时,第四台机组风速增大使其输出的功率增大。随着Pe1,4的增大,Pe1,4占总功率的份额逐渐增大,Pe1,2与Pe1,3占总功率的份额减小。当Pe1,4增大到1200 kW时,U1,4升高至1 830 V进入限幅区,Pe1,4停止增大并稳定到当前值,相应U1,2与U1,3被钳制至1 480 V左右保持不变。而第四台机组进入限幅阶段后,由于输出功率受到限制,第四台机组转子开始加速。第6 s时,第三台机组风速增大至16 r/min,Pe1,3占总功率的份额增大引起U1,3增大。第四台机组在当前风速与转速下一直处于限幅阶段,U1,4,P1,4保持不变。当Pe1,3增大至一定值,第三台机组也进入限幅期,Pe1,3保持恒定,U1,3也稳定到1 830 V。Pe1,2占总功率的份额停止减小,U1,2被钳制在1 140 V。第四台机组从第4 s以后一直处于限幅阶段,所以转子不断加速,当转速达到一定值后启动变桨控制,使机组转速停止上升。 图5 以情形二运行时仿真结果Fig.5 Simulation results for Case 2 图5的仿真结果中,第三台机组达到13 r/min运行,输出最大功率为1 500 kW,如果采用传统的控制,系统中第四台机组直流母线会增大至2 116 V,第二台则会减小到1 006 V,这将可能同时引起过调制与过电压。由图5仿真结果可知,采用本文所述方法同样可以有效避免上述结果。 本文通过分析基于柔性直流输电的串并联型海上D-PMSG风力发电场机组的运行特性,通过对直流母线电压设定合理的上限值,结合功率—电压协调最大功率追踪控制,避免了同一串联簇中机组运行在不同风速时过电压与过调制问题的出现。仿真结果验证了本文所提出的方法的正确性。同时,对比情形1与情形2的仿真结果可知,当串联簇中有机组退出运行时,电压上限值增大,相应变流器电压调节范围要求提高。所以,对于不同的系统,应该考虑设定最多允许退出的的机组数K,以提高系统的经济性。以上结果验证了本文的研究对于基于柔性直流输电的串并联型D-PMSG海上风力发电系统具有一定的参考意义。 [1] 王洪斌,贺晙华,贺辉.具有优化步长的最速下降法MPPT控制[J].电机与控制学报, 2012, 16(10): 21. WANG Hongbin,HE Junhua,HE Hui. Algorithm with optimal step size and steepest descent method in MPPT control[J].Electric Machine and Control, 2012,16(10): 21. [2] 雷鸣,李耀华,葛琼璇,等.MMC变流器模块电压波动对输出电压的影响[J].电机与控制学报2014.18(3):25. LEI Ming, LI Yaohua, GE Qiongxuan,et al. Effects of the module voltage fluctuation on the output voltage of modular multilevel converter[J].Electric Machine and Control, 2014,18(3):25. [3] DE PRADE,M.IGUALADA,I.CORCHERO,C.Hybrid AC-DC offshore wind power plant topology:optimal design[J].IEEE Transactions on Sustainable Energy,2014,9(16):2. [4] MUYEEN S M,RION T,JUNJI T.Operation and control of HVDC-connected offshore wind farm [J].IEEE Transactions on Sustainable Energy,2010,1(1):30. [5] 施刚,王志冰,曹远志,等.适用于高压直流传输的海上直流风电场内网拓扑的比较分析[J].电网技术,2014,38(11): 3060. SHI Gang,WANG Zhibing,CAO Yuanzhi,et al.Comparative analysis of internal grid topology of offshore DC wind farm suitable for HVDC transmission[J].Power System Technology,2014,38(11):3060. [6] ROBINSON J,JOVCIC D,JOOS G.Analysis and design of an offshore wind farm using a MV DC grid [J].IEEE Transactions on Power Delivery,2010,25(4): 2168. [7] ZHAO Kun,LI Gengyin,WANG Bozhong,et al.Grid-connected topology of PMSG wind power system based on VSC-HVDC[C]//International Conference on Electric Utility Deregulation and Restructuring and Power Technologies (DRPT 2011) 4th,300. [8] 何大清,施刚,吴国祥,等.直流串联型风电机组控制及仿真研究[J].南方电网技术,2012,6(6): 95-99. HE Daqing,SHI Gang,WU Guoxiang,et al.The control strategy of DC series-type wind turbines and its simulation [J].Southern Power System Technology,2012,6(6): 95. [9] 姚良忠,施刚,曹远志,等.海上直流风电场内网中串联直流风机的变速控制[J].电网技术,2014,38(9): 2410-2415. YAO Zhongliang,SHI Gang,CAO Zhiyuan,et al.Variable speed control of series-connected DC wind turbines in the internal grid of offshore DC wind farm [J].Power System Technology,2014,38(9): 2410. [10] HUANG Sheng,WANG Hui,LIAO Wu,et al.Generator side converters coordinated control strategy based on VSC-HVDC DD-PMSG wind turbine series-parallel connection[C].Transportation Electrification Asia-Pacific (ITEC Asia-Pacific),2014 IEEE Conference and Expo. [11] Lenke R U,De Doncker R W,Mu-Shin h,et al.Field weakening control of interior permanent magnet machine using improved current interpolation technique[C]//37th IEEE Power Electronics Specialists Conference.Jeju,Korea: IEEE,2006: 1-5. [12] 陈德志,白保东,王鑫博,等.逆变器母线电容及直流电抗器参数计算[J].电工技术学报,2013,28(2):285. CHEN Dezhi,BAI Baodong,WANG Xinbo ,et al.Inverter bus capacitor and parameters calculation of DC reactor[J].Transactions of China Electrotechnical Society,2013,28(2):285. [13] 赵仁德.工永军.张加胜.直驱式永磁同步风力发电系统最大功率追踪控制[J].中国电机工程学报.2009,27(1): 106. ZHAO Rende,WANG Yongjun,ZHANG Jiasheng.Maximum power point tracking control of the wind energy generation system with direct-driven permanent magnet synchronous generators[J].Proceedings of the CSEE,2009,27(1):106. CoordinatedcontrolofpowerandvoltagebasedonVSC-HVDCseries-paralleltopologyD-PMSGbasedwindfarm ZHANG Wen-juan1, PENG Jing2, RONG Fei2 (1.Department of Electronic Information and Electrical Engineering,Changsha University,Changsha 410002,China; 2.College of Electrical and Information Engineering,Hunan University,Changsha 410082,China,) For series-parallel topology wind farm,adopting traditional maximum power point tracking (MPPT) control strategy will lead to over voltage and over modulation when the wind turbines in same series branch under different wind speeds.To solve this problem,the paper investigates the operation characteristics of series-parallel direct-drive permanent magnet synchronous generator(D-PMSG) wind farm based on voltage source converter-high voltage direct current (VSC-HVDC),and a power-voltage coordination control strategy suitable for series and parallel topology MPPT is proposed.In addition,the upper limit of DC voltage was quantitatively analyzed,which ensured the system operates within an upper and low voltage limit in any operation states.The result of simulation proved the method can achieve the purpose of maximum wind power capture in a safe range. VSC-HVDC; power-voltage coordination control strategy; series-parallel topology; upper limit of DC voltage (编辑:刘素菊) 2017-02-01 国家自然科学基金(51507016);湖南省教育厅一般项目(15C0120);长沙市科技计划项目(ZD1601025) 张文娟(1986—),女,博士,研究方向为风力发电控制技术; 彭 婧(1990—),女,硕士研究生,研究方向为直驱永磁风力发电技术; 荣 飞(1978—),男,副教授,研究方向为柔性直流输电技术。 张文娟 10.15938/j.emc.2017.08.012 TM 614 :A :1007-449X(2017)08-0088-07



3 仿真结果分析








4 结 论
猜你喜欢
新世纪智能(英语备考)(2018年11期)2018-12-29环境保护与循环经济(2017年8期)2017-03-22中国环境监察(2016年7期)2016-10-23中国现当代社会文化访谈录(2016年0期)2016-09-26工程建设与设计(2016年1期)2016-02-27探测与控制学报(2015年4期)2015-12-15电测与仪表(2015年4期)2015-04-12电测与仪表(2015年22期)2015-04-09电测与仪表(2015年5期)2015-04-09中国质量与标准导报(2014年1期)2014-02-28