
基于AUV垂直面运动控制的状态增减多模型切换
2017-09-03 10:30周焕银李一平刘开周封锡盛
哈尔滨工程大学学报 2017年8期
周焕银,李一平,刘开周,封锡盛
(1.东华理工大学 机械与电子工程学院,江西 南昌 330013; 2.中国科学院沈阳自动化研究所 机器人学国家重点实验室, 辽宁 沈阳 110016)
基于AUV垂直面运动控制的状态增减多模型切换
周焕银1,2,李一平2,刘开周2,封锡盛2
(1.东华理工大学 机械与电子工程学院,江西 南昌 330013; 2.中国科学院沈阳自动化研究所 机器人学国家重点实验室, 辽宁 沈阳 110016)
自主水下机器人(autonomous underwater vehicle, AUV)系统垂直面运动具有强耦合性、非线性等特点导致AUV系统垂直面难以精确控制,且其纵倾角需控制在某一阈值内,以保证系统安全。根据以上控制要求与AUV垂直面运动模型特点,提出将其解耦为深度控制子模型与纵倾角控制子模型,构建AUV系统垂直面运动控制模型集, 根据模型集所含两子模型特点,提出了状态变量增减的多模型切换的概念。基于切换系统稳定判据——共同Lyapunov函数法,提出了变加权多模型切换策略,实现了切换过程的稳定性,避免了切换过程的抖动问题。多次湖泊试验证明,加权多模型切换策略避免了由于期望深度变化而造成的执行机构饱和、深度和纵倾角超调量过大等问题,且改善了AUV系统深度运动的静动态控制品质。
自主水下机器人; 加权多模型切换控制; 共同Lyapunov函数; 垂直面控制模型; 纵倾角控制模型; 切换系统
自主水下机器人(autonomous underwater vehicle, AUV)系统是一种复杂的非线性耦合系统,且外界环境干扰较难精确描述,这增加了AUV系统运动控制策略设计的难度[1-2]。多模型控制法能够根据被控对象的控制特点设置多个子模型逼近被控对象的全局动态特性,根据各子模型特点设计相应控制策略,建立控制器集,通过模型间的稳定切换达到快速响应外界控制需求的目的[3]。 多模型切换控制的控制优势逐渐得到水下机器人运动控制领域的关注。针对复杂环境下AUV系统的运动控制特点,AGUIAR A P等构建了多模型控制技术,解决了多模型间的平滑切换问题,实现了系统全局稳定性[4],解决了欠驱动AUV定深、定向、回转等运动控制和路径跟踪问题[5]。Cavalletti M等针对ROV系统运载模式不同,采用基于神经网络的切换控制策略法,通过仿真验证了切换系统的鲁棒性[6]。文献[7]采用基于频段模型切换的多控制器法,通过仿真验证了此控制算法在4种不同海况下所具有的良好定位控制性能。 文献[8]延拓了多模型控制法中的相关理论,提出了在线选取最佳控制策略的控制库法,采用基于能量函数的直接切换法,实现了控制策略的稳定转换,并实现了近水面水下机器人系统的航向控制。 文献[9]通过对船舶航向模型的研究设置了多个航向控制子模型,根据这些模型设置了PID控制库,采用基于系统纵向速度、外界环境的直接切换法选取控制策略,由于采用的是直接切换法,从系统输出曲线可以看出系统在切换瞬间运动状态有较大的抖动。文献[10]通过船舶试验证明了采用PID控制、滑模控制两种控制策略相对一种控制策略具有更强抗干扰能力。基于多模型切换的多控制策略研究不仅简化了控制策略设计的难度,且针对不同控制模式设置不同控制策略,提高了系统运动控制性能。
传统多模型切换系统的研究多集中于状态空间一致的研究[11-12],而对于状态空间不一致的多模型切换问题的研究较少。WANG P K C等提出了状态空间缩放法(dilation and contraction)将子系统统一到相同维数下,对非同维线性多模型切换系统的稳定问题进行研究,然而,此方法增加了切换系统的维数,增加了切换策略设计的难度[13]。
为了解决AUV系统垂直面运动状态间的强耦合性,本文设置了基于状态变量增减的多模型切换控制法。根据所研究AUV系统运动控制特点推导了相关切换控制理论,以平缓切换过程控制执行机构以及状态变量的抖动。
1 AUV垂直面运动控制模型集
AUV系统垂直面控制模型是由垂向力方程、纵倾力矩方程以及从运动坐标系到固定坐标系间的转换方程组成。文献[14]将水平面的相关状态量忽略,纵向速度作为系统的模型参数进行处理,获得AUV系统垂直面的控制模型。
假设1:纵向速度变化平缓;
假设2:为了避免所研究AUV系统在执行任务期间出现危险,通常限制纵倾角变化范围为弧度,此条件满足:sinθ≈θ;
假设3: 垂向速度w很小或可忽略不计。
根据以上三条假设构建垂直面控制模型集。
若假设1~3都满足,垂直面控制模型可设置为
(1)
当任务执行过程中满足预设条件1、2,垂直面控制模型为
(2)
纵倾角控制模型为
(3)
式中:Mz、Mw与Mθ分别代表深度控制、垂向速度控制与纵倾角控制子模型;z为垂向轴位移,m,θ为纵倾角,rad;u为纵向速度,m/s;w为垂向速度,m/s;q为纵倾角速度,rad/s;δs为驱动AUV系统垂向运动的水平舵舵角,rad。其中h为载体的稳心高,G为载体自身的重量,hG≈zGW-zBB系统入水后所受的静力矩。其他未描述符号为水动力参数,具体含义请参见文献[14]。
由于所研究被控对象AUV系统纵倾角约束于(-25°,25°),所以假设2成立,本文所研究AUV系统控制执行机构为水平舵,垂向速度w很小满足假设3,所研究垂直面模型集由方程(1)与方程(3)组成。
2 非完全同态多模型切换策略
本文所研究AUV系统垂直面控制模型集主要为状态变量增减的非完全同态多模型切换问题,本文将以此为主,研究多模型切换策略的设计。
说明:1) 本节所涉及的下标含有i,j标号的符号或变量为模型集中所含的第i个或第j个子模型相关的符号或变量; 2) 同态是切换前后各子系统具有完全相同的状态变量。
2.1 非完全同态多模型切换系统相关定义
本节基于线性与非线性多模型稳定切换的定义,延拓了非完全同态多模型稳定切换的概念。
设非完全同态多模型切换系统描述形式为
(4)
模型切换顺序为从子模型Mi切换到Mj记作Mi|→Mj(其中|→表切换的方向),切换后系统状态空间发生变化,由状态向量空间xi切换到向量空间xj,即系统从某一运动控制模式切换为另一运动控制模式后系统状态变量发生变化。
定义1:多模型控制策略根据系统运动状态所构建的各子模型的阶次(维数)不完全相同或状态变量不完全相同称为非完全同态多模型切换系统。水下机器人系统垂直面控制模型集:
(5)
其包含运动子模型Mz与子模型Mθ,其状态变量空间不完全相同。
定义2:当系统由模型Mi切换到模型Mj后,若系统的状态向量空间xi包含于状态向量空间xj,即切换后的状态空间在原状态空间的基础上增加,则称为状态变量增加的非完全同态多模型切换,如式(5),由Mθ切换为Mz。状态变量增加的多模型逆向切换即切换后的状态空间在原状态空间的基础上缩减,则称为状态变量减少的非完全同态多模型切换,如式(5),由Mz切换为Mθ。
定义3[15]:多模型切换过程中,若其输出信号连续无抖动现象,则称切换控制输出信号平稳。
定义4[15]:若系统所含状态量在运行中无抖动且在预设范围内连续平滑运行,则称切换系统稳定。若切换过程中,各状态量在预设范围内逐渐趋近于某一定值,则称切换系统渐近稳定。
为了研究方便,本文延拓了非完全同态多模型切换控制策略。
设子模型所采用的控制律为
(6)
模型Mj的控制律为
(7)

2.2 基于状态变量减少的多模型切换策略
定义状态变量减少的多模型切换系统,设切换前子模型MiD为
(8)
其对应控制律为
(9)
式中:下标D表示切换后系统状态变量减少,A**为子模型系统矩阵所含的各子矩阵。子模型MiD的控制律如式(6)。
切换后子模型MjD为
(10)
(11)
下面根据多模型切换系统的稳定判据共同Lyapunov函数法推导关于状态变量减少的非完全同态多模型稳定切换策略。
推论1:(状态变量减少的共同Lyapunov函数稳定判据):
若切换系统MiD|→MjD各子系统在其对应控制律作用下满足如下两条件:
则称多模型系统具有共同Lyapunov函数Vj。
证明:由条件1知:
(12)

推论2:若切换系统MiD|→MjD满足如下条件:
2)模型MjD在控制律δj(式(11))作用下稳定。
则基于状态变量减少的多模型切换系统稳定。

构建子模型MiD的Lyapunov函数Vi:
(13)
(14)
切换系统的Lyapunov函数满足条件:
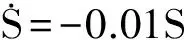
Vj (15) 沿模型MjD对函数(13)求导,有 (16) 推论3:若切换系统MiD|→MjD切换瞬间满足: 1)子模型MiD(方程(8)),MjD(方程(10))在对应控制律δi,δj作用下稳定,且系统切换前后控制执行机构不变(对于本文所研究AUV系统深度控制而言,控制执行机构是指系统的水平舵舵角); 3)系统能量函数 切换过程所采用加权多模型切换控制律为 (18) 式中:α(t)与β(t)分别为切换前后对应的加权因子。 若切换系统满足以上条件,则切换瞬间稳定。 证明:切换系统控制律为式(18),切换过程可描述为 (19) 由于系统切换前后控制执行机构不变,故切换前后各子系统控制律所代表的量相同,在根据条件1与加权因子所满足的条件α(t)+β(t)=1,式(19)可描述为 (20) 切换后系统模型为 (21) (22) 根据推论2可知系统在切换过程中的能量函数渐近衰减,模型切换瞬间稳定。 为了避免直接切换导致系统控制执行机构控制量的瞬间巨变问题,实现切换系统的平稳切换,本文拟设置加权多模型切换控制律(18)。 2.3 状态变量增加的多模型切换 状态变量增加的多模型切换系统是指切换后有新的状态变量增加的切换系统。 设切换前的模型MiI为 (23) 式中:下标I表示切换后系统变量增加,切换后的模型为MjI: (24) (25) 模型MjI在控制律(26)作用下稳定。 (26) 推论4:若切换系统MiD|→MjD所含各子系统在其对应控制律作用下满足如下两条件: 则称基于状态变量增加的非完全同态多模型切换系统具有共同Lyapunov函数Vj。 证明过程为推论1的逆推导。 3.1 AUV系统垂直面运动模型 图1 AUV系统深度控制方框图Fig.1 The block diagram of AUV depth control 3.1.1AUV系统三阶深度控制模型及其控制策略 深度控制模型采用方程组(1),将其整理为状态空间表达式为 (27) S=q-c1θ-c2ez (28) 构建滑模面控制模型: (29) 根据状态反馈控制法[16]配置模型(29)的期望闭环极点为λz与λθ,获取状态反馈控制律: (30) (31) 其中,构建状态变量误差ez=z-zd,eθ=θ-θd,eq=q-qd,(zd、θd、qd分别为期望深度、纵倾角、纵倾角速度,均为标量),其中d为期望达到的量。 由于通常期望纵倾角θd=0与期望纵倾角速度qd=0,将eθ=θ,eq=q,故状态方程(27)的状态误差表达式为 (32) (33) 构建含有滑模面S变量的状态方程,将式(33)代入模型(27),基于滑模面(式(27))的状态方程可表述为 (34) 设期望滑模面微分方程为 (35) 则由式(33)、(35)得: (36) 即 b1δs=-0.01S (37) 根据式(37)推导三阶深度控制模型的控制律δs3: (38) 将相关的水动力参数、系统静力矩等代入控制律(38),由于系数a1、a2、b1含有状态变量纵向速度(此状态变量变化平稳),控制律δs3的控制参数根据纵向速度的变化而动态变化,试验证明此方案可以有效避免耦合状态项间的相互干扰。 3.1.2AUV系统二阶深度控制模型及其控制律 为了解决当深度偏差过高而造成纵倾角迅速变大或超出阈值问题,采用二阶纵倾角控制模型(3)进行纵倾角θ的控制,控制律采用动态反馈法,设期望极点为λθ与λq。根据式(32)可知,其状态误差方程描述形式为 (39) 根据状态反馈控制法[16],获取二阶模型的控制律δs2为 (40) 其中:c3=λθ+λp,c4=λθλp。 3.2 AUV垂直面两子模型切换控制策略设计 由于AUV系统两控制子模型在各控制律作用下具有渐近稳定性,根据推论1与推论4可知模型(32)与模型(39)构建的控制模型集,满足状态变量增加或减少的共同Lyapunov函数稳定判据条件,故两子模型控制律可实现两模型间的任意切换。 本文所采用的基于状态变量空间缩减的非完全同态多模型切换控制策略如下: 2) 当能量函数V≤4时,切换到三阶深度控制律δs=δs3,实现AUV系统的深度控制。 4)从控制律(40)切换到控制律(38)瞬间,根据推论4的相关条件设置相似于第3)条所描述的加权因子α(t)、β(t),其中切换控制律为δ=β(t)δs3+α(t)δs2,α(t)+β(t)=1。 3.3 湖泊试验数据分析 本文通过AUV系统深度控制的湖泊试验数据,分析基于状态变量增减的多模型切换法的控制优势。湖试安排:1)检验三阶滑模控制试验效果,分析在三阶模型控制策略下系统运动控制品质;2)验证状态变量增加的多模型切换效果;3)通过增加下潜深度与变深试验验证多模型切换控制的控制品质;4)通过变化AUV系统下潜深度,验证切换策略。 基于三阶深度模型的定深控制结果分析,此次湖试AUV系统下潜深度为8 m。从湖试数据曲线(如图2)分析AUV系统垂直面相关状态量与控制量的输出,其中深度控制出现了较大的超调量δp=73%,分析其原因是由于AUV系统纵倾角过大所引起、多次达到阈值±0.44rad即±25°、且震荡等控制品质问题;系统控制执行机构水平舵长时间(50s)处于满舵状态,这些都是不期望的现象。 图2 三阶深度控制策略δs3控制下输出曲线Fig.2 Curves under the three-dimension depth controller δs3 基于状态变量增减的非完全同态多模型切换在AUV系统定深控制试验中的验证,仍采用定深8m的试验,试验结果 (如图3)表明:AUV系统深度控制品质得到改善,深度控制超调消失;纵倾角控制品质得到改善无震荡现象;通过多模型切换策略的设置使得水平舵满舵时间大大缩短。 图3 基于状态变量增加的多模型切换垂直面输出曲线Fig.3 Curves under the multi-model switching control with increasing dimensions 为了验证基于状态变量增减的多模型切换控制律能否保证切换过程的平稳性,本文采用AUV系统的变深控制试验,任务为AUV先定深10m,450s后定深5m,湖试结果如图4所示。AUV系统深度控制试验表明,AUV系统深度与纵倾角的控制具有调节时间短、无超调、无静态误差等良好动静态品质。在变深为5m的控制过程中状态变量减少的切换有效地控制了水平舵舵角的变化。 图4 基于状态量增减的多模型切换变深控制输出曲线Fig.4 Curves under the multi-model switching control with decreasing dimensions 1)所提出的状态变量增减的非完全同态多模型切换法将复杂的垂直面运动控制问题分解为深度控制与纵倾角控制两类方式。 2)多次AUV湖试验证了基于状态变量增减的多模型切换控制策略,可消除AUV系统深度控制的超调量,避免了纵倾角过大现象。 3)加权多模型切换控制策略可以避免由于深度突然变化而造成控制执行机构的抖动,提高了AUV系统的深度控制的动、静态品质。 [1] 封锡盛,李一平,徐红丽. 下一代海洋机器人-写在人类创造下潜深度世界纪录10912米50周年之际[J]. 机器人, 2011, 33(1): 113-118. FENG Xisheng, LI Yiping, XU Hongli. The next generation unmanned marine vehicles dedicated to the 50 anniversary of the human world record diving 10912 m[J]. Robot, 2011, 33(1): 113-118. [2] 徐玉如,李彭超. 水下机器人发展趋势[J]. 自然杂志, 2011, 33(3): 125-133. XU Yuru, LI Pengchao. Developing tendency of unmanned underwater vehicles[J]. Chinese journal of nature, 2011, 33(3): 125-133. [3] 周焕银,刘开周,封锡盛. 基于权值范围设置的多模型稳定切换控制研究[J]. 控制与决策, 2012, 27(3): 349-354. ZHOU Huanyin, LIU Kaizhou, FENG Xisheng. Stability switching of multiple models based on weighting setting[J]. Control and decision, 2012, 27(3): 349-354. [4] AGUIAR A P, PASCOAL A M. Regulation of a nonholonomic autonomous underwater vehicle with parametric mod- eling uncertainty using Lyapunov functions[C]//Proceedings of the IEEE Conference on Decision and Control. Orlando, 2001: 4178-4183. [5] AGUIAR A P, PASCOAL A M. Global stabilization of an underactuated autonomous underwater vehicle via logic-based switching[C]//Proceedings of the IEEE Conference on Decision and Control. Las Vegas, 2002: 3267-3272. [6] CAVALLETTI M, IPPOLITI G, LONGHI S. Lyapunov-based switching control using neural networks for a remotely operated vehicle[J]. International journal of control, 2007, 80(7): 1077-1091. [7] 林孝工,谢业海,赵大威,等.基于海况分级的船舶动力定位切换控制[J].中国造船,2012, 53(3): 165-174. LIN Xiaogong, XIE Yehai, ZHAO Dawei, et al. Switching control for dynamic positioning vessels based on sea states classificaiton[J]. Shipbuilding of China, 2012, 53(3): 165-174. [8] 周焕银, 封锡盛, 胡志强, 等. 基于多辨识模型优化切换的USV 系统航向动态反馈控制[J]. 机器人, 2013, 35(5): 552-558. ZHOU Huanyin, FENG Xisheng, HU Zhiqiang, et al. Dynamic feedback controller based on optimized switching of multipleidentification models for course control of unmanned underwater vehicle[J]. Robot, 2013, 35(5): 552-558. [9] HAMMOUD S, MOHAMED D. Ship motion control using multi-controller structure[J]. Ocean engineering, 2012, 55: 184-190. [10] NGUYEN T D, SORENSEN A J, QUEK S T. Design of hybrid controller for dynamic positioning from calm to extreme sea conditions[J]. Automatica, 2007, 43(5): 768-785. [11] XIA Chiyun. Optimal control of switched systems with dimension-varying state spaces[D]. Los Angeles: University of California, 2007. [12] BALDI S, BATTISTELLI G, MARI D,et al. Multi-model unfalsified switching control of uncertain multivariable systems[J]. International journal of adaptive control and signal processing., 2012, 26(8) SI: 705-722. [13] WANG P K C, HADAEGH F Y. Stability analysis of switched dynamical systems with state-space dilation and contraction[J]. Journal of guidance, control, and dynamics, 2008, 31(2): 395-401. [14] 蒋新松, 封锡盛, 王棣棠. 水下机器人[M]. 沈阳:辽宁科学技术出版社, 2000: 150-183. JIANG Xinsong, FENG Xisheng, WANG Ditang. Underwater vehicles[M]. Shenyang:Liaoning Publisher Science and Technology, 2000: 150-183. [15] LIBERZON D. Switching in systems and control [M]. Boston: Birkhauser, 2003. [16] 刘豹. 现代控制理论[M].3版.北京:机械工业出版社, 2006: 188-200. 本文引用格式: 周焕银,李一平,刘开周,等. 基于AUV垂直面运动控制的状态增减多模型切换[J]. 哈尔滨工程大学学报, 2017, 38(8): 1309 -1315. ZHOU Huanyin, LI Yiping, LIU Kaizhou, et al. Multi-model switching control laws for the vertical plane control of an autonomous underwater vehicle[J]. Journal of Harbin Engineering University, 2017, 38(8): 1309-1315. Multi-model switching control laws for the vertical plane control of an autonomous underwater vehicle ZHOU Huanyin1, LI Yiping2, LIU Kaizhou2, FENG Xisheng2 (1.School of Mechanical and Electronic Engineering, East China University of Technology, Nanchang 330013, China; 2.State Key Laboratory of Robotics, Shenyang Institute of Automation Chinese Academy of Sciences, Shenyang 110016, China) System vertical plane motion states have strong coupling and nonlinear characteristics, thereby making precise vertical plane control of an autonomous underwater vehicle (AUV) system difficult. Moreover, the pitch angle, which is one of the state variables of vertical plane control, should not exceed a threshold; otherwise, the AUV system might encounter damage issues, such as deep/over control and even more serious situations. In accordance with the motion characteristics of an AUV system with different control requirements on a vertical plane, the vertical plane motion model was decoupled into two mathematical sub-models (depth control model and pitch angle control model) to build the vertical plane dynamic model set of an AUV system. A corresponding control strategy was adopted according to the sub-model characteristics of the model set. Given that the system state variables and the number of dimensions will change before and after switching of sub-models, the concept of multi-model switching is based on an increase and decrease of state variables. To avoid chattering due to switching between the two sub-models, the variable weighting multi-model switching strategy was proposed on the basis of common Lyapunov function, which is the stability theory for switched systems, thereby ensuring stability during the switching process. Lake trials for the vertical plane of a type of AUV prove that the weighted multi-model switching strategy avoids saturating the executor as a result of a change in expected depth and overshooting of depth and pitch angle, among others. The weighted multi-model switching strategy improves the static and dynamic control quality of the deep movement of AUV systems. autonomous underwater vehicle; multi model switching control law with weighting values; common Lyapunov; vertical plane model; pitch control model; switching control system 2016-07-08. 日期:2017-06-02. 国家自然科学基金项目(51409047);机器人学国家重点实验室开放基金项目(2016-O05). 周焕银(1975-), 女, 副教授; 封锡盛(1941-), 男, 研究员,博士生导师,中国工程院院士. 周焕银,E-mail:hyzou@ecit.cn. 10.3969/j.issn.1006-7043.201607021 TP273 A 1006-7043(2017)08-1309-07 网络出版地址:http://www.cnki.net/kcms/detail/23.1390.u.20170602.2003.008.html

3 AUV湖试验证分析








4 结论
猜你喜欢
科学大众(2021年19期)2021-10-14
北京汽车(2021年3期)2021-07-17
数字技术与应用(2021年2期)2021-04-22
湖南大学学报·自然科学版(2021年1期)2021-02-21
科学大众·小诺贝尔(2021年10期)2021-01-22
吉首大学学报(自然科学版)(2020年2期)2020-09-14
五邑大学学报(自然科学版)(2020年1期)2020-06-17
佳木斯大学学报(自然科学版)(2020年2期)2020-05-18
智能计算机与应用(2020年10期)2020-03-18
信息安全研究(2016年3期)2016-12-01
