
基于FCD-VSMM的强机动目标无源协同定位算法
2017-08-16 10:02杨胜伟郭云飞
杭州电子科技大学学报(自然科学版) 2017年4期
杨胜伟,郭云飞
(杭州电子科技大学自动化学院,浙江 杭州 310018)
基于FCD-VSMM的强机动目标无源协同定位算法
杨胜伟,郭云飞
(杭州电子科技大学自动化学院,浙江 杭州 310018)
针对无源协同定位系统强机动目标跟踪问题,提出一种基于最远点优先渐近的当前统计有向图切换变结构交互多模型算法.建立了强机动目标无源协同定位跟踪模型,提出了基于当前统计有向图切换变结构交互多模型算法,并采用最远点优先渐近算法优化了伪测量,提高了算法的跟踪性能.仿真结果验证了所提方法的有效性.
强机动目标跟踪;无源协同定位;当前统计;有向图切换;最远点优先渐近
0 引 言
无源协同定位[1](Passive Coherent Location,PCL)系统就是利用外辐射源(如商业调频广播电台[2],电视台发射信号[3],手机信号[4]等)照射目标,通过接收天线被动接收目标散射的外辐射源信号,对目标定位跟踪.与主动雷达相比,PCL成本低,覆盖范围广,具有良好的反隐身能力和战场生存能力,引起国内外学者的长期关注[2-5].
在PCL系统中,当目标呈现强机动飞行时,跟踪变得更加复杂.文献[4]研究了存在观测闪烁噪声情况下,基于交互多模型机动目标无源协同定位跟踪算法,文献[6]中提出了基于Singer模型和扩展卡尔曼滤波的机动目标无源协同定位跟踪算法.
为了进一步提高强机动目标跟踪性能,本文提出了一种基于最远点优先渐近[7]的当前统计模型[8]有向图切换变结构多模型[9]算法(Farthest Point Priority Asymptotically Current Statistics Digraph Switch Variable Structure Multiple Model, FCD-VSMM).首先将PCL得到的测量伪线性处理得出伪测量,通过最远点优先渐近(Farthest Point Priority Asymptotically,FPPA)算法优化伪测量,得到了融合伪测量,再采用当前统计有向图切换变结构交互多模型(Current Statistics Digraph Switch Variable Structure Multiple Model, CD-VSMM)算法进行滤波跟踪.
1 问题描述
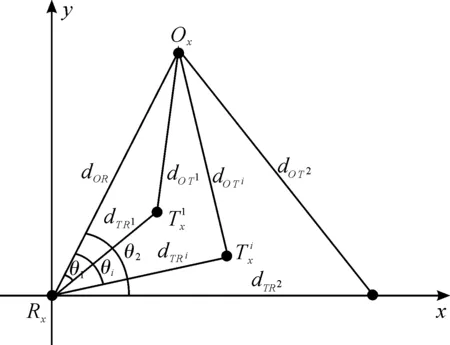
图1 多基站PCL示意图


Xk=Fk-1Xk-1+vk-1
(1)
其中,Fk-1为状态转移矩阵,vk-1为零均值高斯白噪声,其协方差为Qk-1.

(2)

(3)

2 FCD-VSMM算法
2.1 伪线性处理
(4)

2.2 基于FPAA的优化
基于FPAA优化的主要步骤如下:

(5)

2.3 基于CD-VSMM滤波算法
CD-VSMM滤波算法如下:
1)设定有向图切换准则.根据先验信息建立完备模型,并按照一定组合规律组成有向图,根据关键模型概率进行有向图切换,同时对新激活的模型分配概率.


3 仿真及性能分析
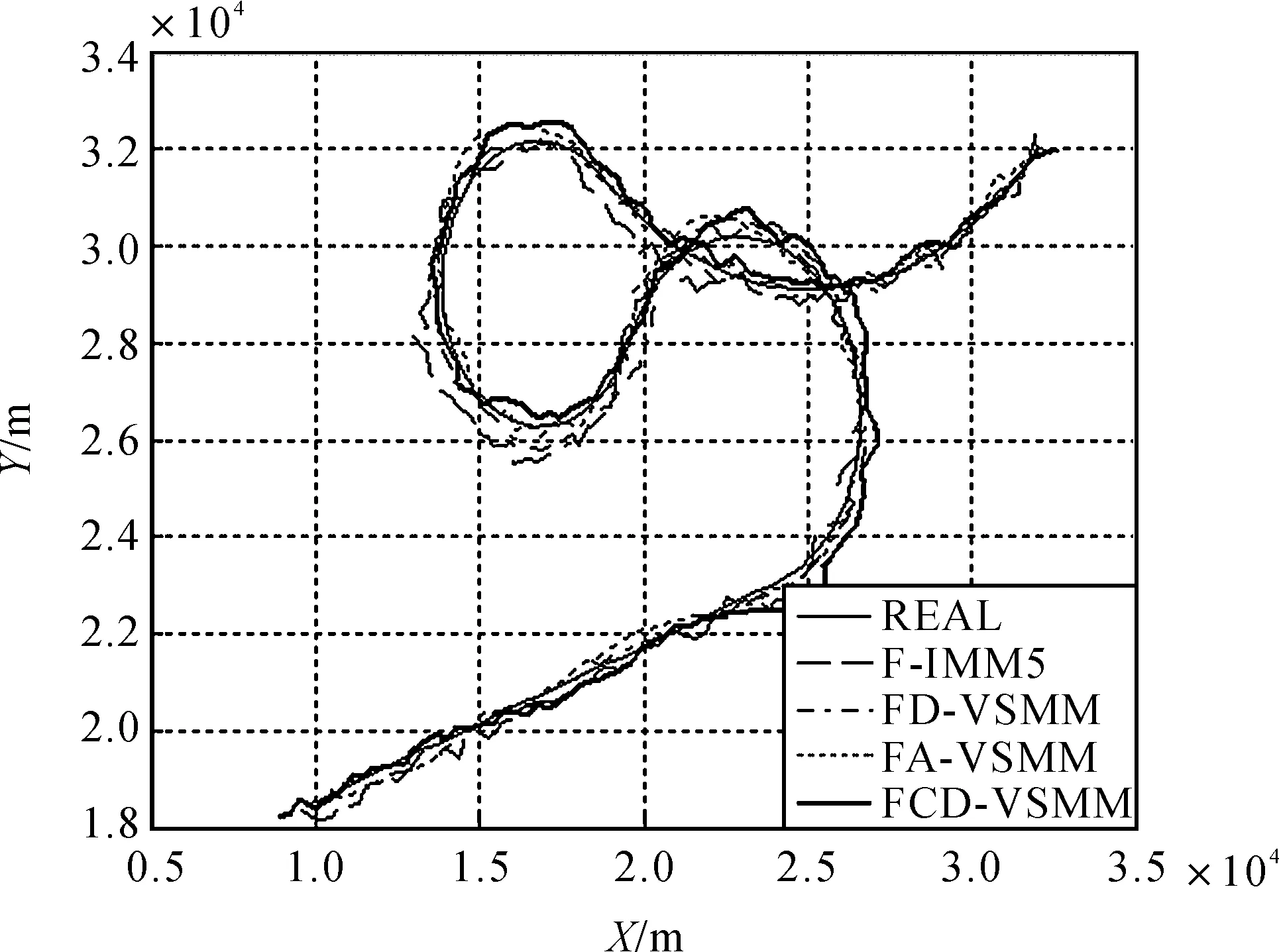
图2 跟踪轨迹比较图
通过仿真来证明所提算法的有效性.考虑单个强机动目标跟踪问题,目标起始状态为X0=[32 000 m,-176 m/s,0 m/s2,32 000 m,-176 m/s,0 m/s2]T,跟踪时间为200 s,间隔为1 s.跟踪时间0 s≤t≤50 s时,转弯率ω=-0.03 rad/s;51 s≤t≤100 s时,转弯率ω=0.1 rad/s;101 s≤t≤150 s时,转弯率ω=-0.08 rad/s;151 s≤t≤200 s时,为直线运动.本文将所提算法与使用5模型集合的F-IMM5算法、使用有向图切换的FD-VSMM算法[10]和使用自适应算法的FA-VSMM算法[11]进行仿真比较.
运用Matlab进行100次Monte-Carlo仿真实验,跟踪轨迹如图2所示,位置和速度均方根误差(Root Mean Square Error,RMSE)如图3和图4所示,几种算法的性能指标比较如表1所示.

图3 位置RMSE比较

图4 速度RMSE比较
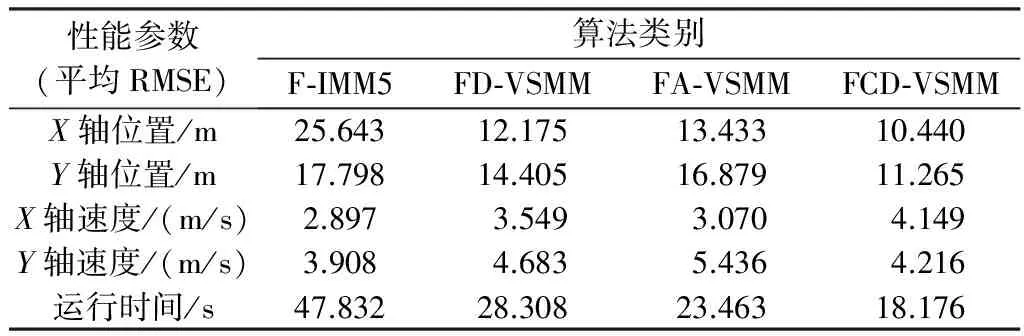
表1 性能指标比较汇总表
从图2和表1并结合图3、图4可以看出,在无源协同定位场景中,对于强机动目标的跟踪,与F-IMM5、FD-VSMM和FA-VSMM相比,FCD-VSMM算法的精度更高,并且本文算法使用变结构交互多模型不仅能有效减小计算量,而且还可以更准确地跟踪目标,费效比更高.
4 结束语
本文提出基于FCD-VSMM的强机动目标无源协同定位算法,采用CD-VSMM进行滤波跟踪,并采用FPAA优化伪量测,提高了算法的跟踪性能.如何更好地优化伪测量,进一步提高算法的跟踪性能是下一步的研究工作.
[1]GRIFFITHS H D, BAKER C J. Passive coherent location radar systems. Part 1: performance prediction[J]. IEE Proceedings-Radar, Sonar and Navigation, 2005,152(3): 153-159.
[2]CHOI S, CROUSE D, WILLETT P et al. Multistatic target tracking for passive radar in a DAB/DVB network: initiation[J]. Aerospace and Electronic Systems, IEEE Transactions on,2015,51(3):2460-2469.
[3]万显荣,易建新,方高,等.三坐标数字电视外辐射源雷达实验研究[J].系统工程与电子技术,2014,36(7):1263-1268.
[4]LI H W, WANG J. Particle filter for manoeuvring target tracking via passive radar measurements with glint noise[J]. IET Radar, Sonar & Navigation, 2012,6(3):180-189.
[5]HASSANI A, BERTRAND A, MOONEN M. Tracking of a rotating object in a Wireless Sensor Network using fuzzy based adaptive IMM filter[C]//IEEE Symposium on Communications and Vehicular Technology in the Benelux. 2012:1-6.
[6]孔博,修建娟,修建华.基于Singer模型的机动目标无源协同定位跟踪算法研究[J].电光与控制,2011,18(5):14-18.
[7]李红军,张晓鹏.离散点集最小包围圆算法分析与改进[J].图学学报,2012,33(2):34-38.
[8]刘建书,李人厚,刘云龙.基于“当前”统计模型的交互式多模型算法[J].系统工程与电子技术,2008,30(7):1351-1354.
[9]郭云飞,张幸,林岳松.基于DS-VSMM的声网络低空机动目标跟踪[J].光电工程,2011,38(8):1-6.
[10]黄翔宇,彭东亮.基于无味卡尔曼有向图切换的机动目标跟踪VSMM算法[J].光电工程,2010,37(12):30-34.
[11]曾东,彭冬亮.强机动目标自适应变结构多模型跟踪算法[J].计算机系统应用,2012,21(10):114-117.
FCD-VSMM Based Strong Maneuvering Target Passive Coherent Location Algorithm
YANG Shengwei, GUO Yunfei
(SchoolofAutomation,HangzhouDianziUniversity,HangzhouZhejiang310018,China)
In order to track strong maneuvering target in passive coherent location system, a farthest point priority asymptotic current statistics digraph switch variable structure multiple model method is proposed. First, the passive coherent location model is presented. Second, the current statistics digraph switch variable structure multiple model method is proposed for tracking strong maneuvering target, and the farthest point priority asymptotic algorithm is used to optimize pseudo measurements and improve the estimation performance. Simulation results verify the effectiveness of the proposed algorithm.
strong maneuvering target tracking; passive coherent location; current statistics; digraph switch; farthest point priority asymptotic
10.13954/j.cnki.hdu.2017.04.011
2016-09-18
杨胜伟(1991-),男,湖北孝感人.硕士研究生,无源协同定位.通信作者:郭云飞副教授,E-mail:gyf@hdu.edu.cn.
TN953
A
1001-9146(2017)04-0053-04
猜你喜欢
山西大学学报(自然科学版)(2021年4期)2021-08-31
云南民族大学学报(自然科学版)(2021年3期)2021-06-24
装备制造技术(2020年3期)2020-12-25
电子制作(2019年12期)2019-07-16
当代陕西(2019年12期)2019-07-12
汉语世界(The World of Chinese)(2019年1期)2019-03-18
北京航空航天大学学报(2017年6期)2017-11-23
互联网天地(2016年2期)2016-05-04
中北大学学报(自然科学版)(2015年6期)2015-12-02
中北大学学报(自然科学版)(2015年5期)2015-12-02
