
基于改进动态差分进化算法的光伏阵列MPPT控制研究
2017-08-08 03:00:53李宏玉杨婷董琳琳孟子慧张守宇
电气传动 2017年7期
李宏玉,杨婷,董琳琳,孟子慧,张守宇
(1.东北石油大学电气工程学院,黑龙江 大庆 163318;2.大庆石化工程有限公司,黑龙江 大庆 163000;3.大庆油田建设集团有限责任公司安装公司,黑龙江 大庆 163000)
基于改进动态差分进化算法的光伏阵列MPPT控制研究
李宏玉1,杨婷1,董琳琳1,孟子慧2,张守宇3
(1.东北石油大学电气工程学院,黑龙江 大庆 163318;2.大庆石化工程有限公司,黑龙江 大庆 163000;3.大庆油田建设集团有限责任公司安装公司,黑龙江 大庆 163000)
针对部分阴影使光伏阵列的输出特性呈现多峰值的现象,提出了一种基于改进动态差分进化的全局MPPT寻优算法。该算法修改了变异策略,能够快速地收敛于系统的最大功率点,同时加入小步长扰动微调以增加算法精度。经Matlab/Simulink仿真工具验证基于改进动态差分进化的MPPT控制算法在控制速度和精度上都得到了有效改善。
阴影遮蔽;光伏阵列;最大功率点跟踪;动态差分进化算法
最大功率点跟踪技术(MPPT)在光伏发电系统中起着至关重要的作用,其中阴影遮蔽使PV阵列的输出特性曲线呈现多峰值的问题一直都是集中式光伏发电系统MPPT技术的重点和难点。而传统MPPT控制算法,如扰动观察法、电导增量法以及针对单峰MPPT寻优的模糊算法[1]、神经网络等在多峰寻优的过程中无法正确搜寻到全局最优工作点,为了进一步提高集中式光伏发电系统的发电效率,国内外学者提出了各种控制方法以达到全局寻优的目的。
近年来,群体智能算法[2]如粒子群算法、蚁群算法等逐渐被应用于光伏MPPT算法全局寻优的实践中,体现了其控制方法的有效性与可行性。文献[3]分析了光伏阵列P—U曲线电压和功率的一般性规律,并将此规律应用粒子群算法的初始阶段,增加了收敛速度。文献[4-6]分别采用自适应权重粒子群算法、加入模拟退火环节或者修改迭代顺序和规律在静态阴影寻优的过程中都达到了良好的效果,但寻优时间较长。文献[7]运用改进的粒子群算法减少了算法的稳态震荡,在大波动的环境变化下能够准确找到MPP点,并通过实验和仿真验证了方法的可行性。文献[8]采用初始差分进化算法实现了光伏阵列的全局寻优,但没有考虑变化阴影对算法和MPPT控制的影响。
本文设计了一种基于动态差分进化的MPPT控制算法,综合PV阵列的多峰值特性和动态差分进化算法本身存在的优缺点对控制算法进行改进,提高了算法搜索速度和搜索精度,得到良好的效果。
1 局部阴影条件下的光伏阵列输出特性分析
光伏电池是太阳能发电系统的关键部分,通常将光伏电池进行串并联组成光伏阵列对系统进行供电,在实际的应用过程中,为避免由于局部遮蔽或支路故障引起的热斑现象,一般在每个光伏组件上并联1个旁路二极管,但是这种做法导致了PV阵列的输出特性呈现多峰性,这对光伏阵列的MPPT算法提出了更高的要求。
本文在Matlab/Simulink环境下搭建如图1a所示的规模为{3×3}的光伏阵列仿真模型,组成阵列的每个光伏组件输出特性曲线如图1b所示,开路电压Uoc=22.5 V,短路电流Isc=4.3 A,MPP点处电压、电流及最大功率分别为Um=18.75 V,Im=3.9 A,Pm=73.125 W,本文对{3×3}的PV阵列阴影遮蔽情况进行了如下3种仿真测试,其光伏阵列的开路电压为Uoc_array=67.450 2 V。
1)阴影设置1。如图2a所示,[3∶1∶0]模式,光照强度1A=1B=1C=800 W/m2,2C=200 W/m2,其它模块均为1 000 W/m2。功率峰极值点坐标为(17.994 8,196.163 2),(52.905 6,423.220 2)。
2)阴影设置2。如图2b所示,1B=1C=800W/m2,2B=2C=400 W/m2,3C=200 W/m2,其它模块均为1 000 W/m2,即[2∶2∶1]模式。其中,3个极值点坐标从左到右依次为(16.827 4,198.784 9),(37.662 5,329.961 3),(53.663 2,306.818 7)。
3)无阴影。P—U输出特性为单峰曲线,其最大功率点坐标为(54.819 2,649.691 6)。

图1 3×3的PV阵列结构图与光伏电池输出特性Fig.1 The structure of 3×3 photovoltaic array and characteristics

图2 3种阴影设置下P—U特性曲线Fig.2 ThreeP—Ucharacteristics curves of photovoltaic array under partially shadowed conditions
如图2,在阴影设置1中,各峰值点所对应的电压分别为Um1=17.994 8 V,Um2=52.905 6 V,其中Um1≈0.79Uoc,Um2≈0.78Uoc_array;阴影设置2中有3个峰值点,其对应电压分别为Um1=16.827 4 V,Um2=37.662 5 V,Um3=53.663 2 V,其中可以估算出Um1≈1×0.75Uoc,Um2≈2×0.84Uoc,Um3≈3× 0.795Uoc≈0.795Uoc_array;第3种设置为无阴影,只有1个功率极值点,对应电压为Um=54.819 2 V,Um≈0.81Uoc_array。由此可以看出局部阴影条件下,光伏阵列功率极值点所对应的电压与其开路电压之间存在一定的近似倍数关系。文献[9]通过对串并联光伏阵列输出特性的分析计算,也得出光伏阵列输出功率极大值点所对应电压与其开路电压之间存在一般性规律。若阵列规模为{n×m},n为光伏阵列串联数,m为并联数,光伏阵列最多出现n个功率极值点,结合本文的仿真结果,可以得到每个功率极值点所对应的峰值电压约为l×(0.75~0.84)Uoc_module,l=l~n-1,本文取0.78;第n个功率峰值点对应的电压近似为0.8Uoc_array。
2 基于改进动态差分进化的MPPT控制方法
2.1 动态差分进化算法
差分进化算法与标准进化算法的步骤相似,主要包括变异、交叉和选择3种操作。假设D维实数空间S⊂RD是差分进化算法所要优化问题的搜索空间,由NP个D维实参数向量Xti={xti1,…,xtiD}∈S(i=1,…,NP)构成的一代种群Pt={Xti,…,XtNP}。即Xti为DE算法的实参数向量,t为DE算法的进化代数,P为种群规模。初始种群应该覆盖整个搜索空间,当前种群中的一个父代矢量(目标矢量)进行迭代进化时,每个目标个体要进行变异生成变异个体,之后与目标个体交叉重组生成试验矢量。最后进行适应度计算并与目标个体相比,选取更优的个体作为下一次迭代的目标个体。
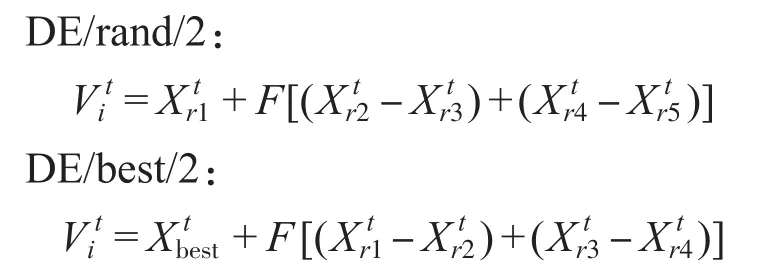
1)变异操作。DE家族中拥有多种变异策略,本文主要用到2种变异策略,分别是:
2)交叉操作。变异矢量与目标矢量根据下式进行交叉操作得到试验矢量以增加种群的多样性。

其中,CR是交叉因子,rand⊂[0,1]的随机数,保证至少有1个变异向量被引入试验矢量。
3)选择操作。DE算法采用贪婪的选择策略,以最大化为例。当试验矢量的适应度大于目标矢量的适应度时,试验矢量个体取代目标矢量,否则保持目标矢量不变。

本文采用动态差分进化算法(DDE),与基本DE的主要区别在于个体的动态更新,即当试验矢量替代目标矢量时,立即进入到当前种群参与其后的变化更新。编程时,不必为当前和父代种群都分配存储空间,取消代数计数器t和t+1,从而提高了算法的收敛速度。
2.2 基于DDE的光伏MPPT控制
针对光伏发电的多峰输出特性及其DDE算法的特点,本文做出如下改进。
1)种群初始化向量。根据光伏阵列多峰P—U输出特性,初始向量应在搜索范围内并包含所有可能出现的功率极大值点所对应的电压近似值,若阵列为{n×m},则有n个功率极大值点,所对应的电压为l×0.78Uoc_module,第n个峰值点为0.8Uoc_array。这样保证对可能出现的极值点的全部搜索,提高收敛速度。
2)变异策略。本文设置2个相同的初始种群以及DE/rand/2和DE/best/2的双变异策略,每个种群设置5个种群个体,f为个体数,其中DE/ rand/2策略的基矢量是随机选取的,全局搜索能力强,而DE/best/2变异策略的基矢量是当前种群适应度中最好的个体,局部搜索性能优越且收敛速度快。将两种变异策略相结合,f>5时,变异策略1结束,进入变异策略2,2个种群的迭代过程所得到的结果分别储存,互不干扰,只在互相移民阶段进行信息交换以增加收敛速度并防止算法陷入局部最优。
在变异的过程中,保证DDE算法的变异向量在问题的搜索范围内,若超出边界值,则向量边界值取代变异向量。
3)适应度。在选择操作时,结合MPPT算法,将P=U×I作为评估试验矢量和目标矢量的适应度。当试验矢量的功率适应度大于目标矢量时,试验矢量取代目标矢量,否则不变。
4)DDE算法结束条件。当种群中向量之间的最大距离小于0.5时,表明向量的位置是集中的,此时终止DDE算法,并输出参考电压等于种群全局最优电压,即U=Ubest,这样可以减少DDE算法的运算时间。
5)扰动微调。当DDE算法终止后,在参考电压U的基础上,进行小步长的占空比扰动,逐渐逼近系统最大功率点,扰动观察的同时,不断刷新全局最大功率点位置直到算法重启。
6)DDE算法重启条件。PV阵列的P—U特性曲线随着外界条件变化而改变,需要重启算法对PV阵列进行寻优,从而使系统在新的最大功率点进行供电,其重启条件为

基于改进DDE算法的光伏MPPT控制算法的流程图如图3所示。

图3 基于DDE的MPPT控制算法框图Fig.3 The algorithm frame of MPPT control method based on dynamic differential evolution
3 仿真验证
在Matlab/Simulink仿真环境下,搭建基于Boost电路的MPPT仿真模型如图4所示。光伏阵列规模为{3×3},光伏模块仿真参数如上文所示。编写改进动态差分进化算法的S-function函数,其中DDE算法的变异比例因子F=0.5,交叉因子CR=0.6,算法2个初始向量矩阵都[15,18,36,54,60],搜索范围[15,62],系统采样时间0.004 s,运行时间t=3 s,仿真时分别将系统置于上文提到的3种阴影情况下来验证算法的可行性和优越性。

图4 PV阵列MPPT控制模型结构图Fig.4 The MPPT control model of PV array
1)当0<t<1时,光伏阵列仿真环境设置为阴影1,即[3∶1∶0]模式,其中最大功率点坐标为(52.905 6,423.220 2)。
2)当1<t<2时,光伏阵列仿真环境设置为阴影2,即[2∶2∶1]模式,其中最大功率点坐标为(37.662 5,329.961 3)。
3)当2<t<3时,光伏阵列仿真环境设置为无阴影,P—U曲线只有1个最大功率点,坐标为(54.819 2,649.691 6)。
图5为P和U随时间变化的搜寻轨迹图。

图5P和U随时间变化的搜寻轨迹Fig.5 ThePandUsearch paths with the time
图5分别为系统在t∈[0,3]内MPPT寻优过程中PV阵列所发出的功率P和某一电压参考向量U在0~3 s内随时间变化的曲线图以及3种阴影情况下算法最终搜寻的最大功率P和最优电压U的放大图像。
从图5中可以看到算法分别在1 s和2 s时重启,电压在0.416 0 s,1.463 2 s,2.426 4 s时的突变表明扰动微调稳定,算法结束,此时重新初始化并再次等待重启,搜索时间约为0.4~0.5 s,其中搜寻的最终MPP点依次为(423.006 8~423.037 3),(329.852 4~329.875 9),(649.497 8~649.554 5),计算得到3种情况下的功率寻优误差分别为0.05%,0.033%,0.029 9%。DDE阶段最终寻找的全局最优电压别为52.983 6 V,38.067 5 V,54.7614V,与实际最大功率点对应电压52.9056V,37.662 5 V,54.819 2 V相差不大。
图6为初始差分进化算法的MPPT控制仿真结果。
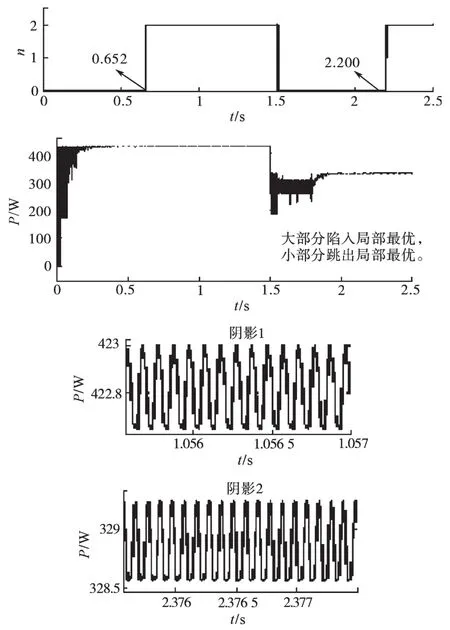
图6 基于DE算法的MPPT仿真结果Fig.6 The MPPT simulation results based on DE algorithm
图6中,n为算法阶段标志位,当n=1时算法结束;当n=2时表示算法初始化并等待重启。在1.5 s时系统由阴影1变为阴影2,其算法终止时间为0.652 s,2.200 s,算法搜寻时间在0.6~0.7 s之间,小图为2种阴影条件下最终寻得的最大功率放大图像,分别为(422.6541~423.001),(328.5654~329.235 6),算得误差为0.134%,0.423%,算法误差范围较大,并且容易陷入局部最优。
由仿真分析可知,本文所设计的基于改进动态差分进化的多峰寻优算法收敛速度可达到0.5 s左右,收敛速度更快,并且误差更小,精度更高,文中仿真实验中得出的最大误差e≤0.05%。
4 结论
本文针对集中式光伏阵列在局部阴影条件下的输出特性呈现多峰值的问题,设计了一种基于动态差分进化的全局MPPT控制算法,加入占空比扰动微调并修改了变异策略,经过Matlab/Simulink工具进行仿真分析,结果表明该算法具有很高的收敛速度和精度,并且在有无阴影时均能找到最大功率点,具有很高的实用价值。
[1]Fu Qiang,Tong Nan.A New Fuzzy Control Method Based on PSO for Maximum Power Point Tracking of Photovoltaic Sys⁃tem[C]∕∕IEEE International Conference on Computer Sci⁃ence and Network Technology,2011:1487-1491.
[2]聂晓华,赖家俊.局部阴影下光伏阵列全局最大功率点跟踪控制方法综述[J].电网技术,2014,38(12):3279-3285.
[3]朱艳伟,石新春,但扬清,等.粒子群优化算法在光伏阵列多峰最大功率点跟踪中的应用[J].中国电机工程学报,2012,32(4):42-48.
[4]胡克用,胥芳.适用于光伏多峰功率跟踪的改进型粒子群优化算法[J].西安交通大学学报,2015,49(4):140-148.
[5]袁晓玲,陈宇.自适应权重粒子群算法在阴影光伏发电最大功率点跟踪(MPPT)中的应用[J].中国电力,2013,46(10):85-90.
[6]石季英,张文,张永革,等.基于改进PSO算法的光伏阵列MPPT研究[J].电气传动,2015,45(7):52-55.
[7]Ishaque K,Salam M Z,Amjad,et al.An Improved Particle Swarm Optimization(PSO)Based MPPT for PV with Reduced Steady-state Oscillation[J].IEEE Tran.Power Electronics,2012,27(8):3627-3638.
[8]林祺蓉,王俏俏,林祺蔚,等.基于差分进化算法的阴影影响下光伏阵列MPPT控制研究[J].中国电力,2015,48(6):39-44.
[9]吴小进,魏学业,于蓉蓉,等.复杂光照环境下光伏阵列输出特性研究[J].中国电机工程学报,2011,31(S1):162-167.
Research on MPPT Control Method of PV Array Based on Improved Dynamic Differential Evolution Algorithm
LI Hongyu1,YANG Ting1,DONG Linlin1,MENG Zihui2,ZHANG Shouyu3
(1.School of Electrical Engineering and Information,Northeast Petroleum University,Daqing 163318,Heilongjiang,China;2.Daqing Petrochemical Engineering Co.,Ltd.,Daqing 163000,Heilongjiang,China;3.Daqing Oilfield Construction Group Limited Company Installation Company,Daqing 163000,Heilongjiang,China)
Because the power-voltage(P-V)characteristics of PV array become multi-peak curve under partially shadowed conditions,a MPPT control method of PV array based on dynamic differential evolution algorithm was come up with.The method could find the MPP point of PV system quickly and modify mutation strategy in order to improve the convergence speed.Meanwhile the method used small step perturbation to increase the accuracy of algorithm.Using the software Matlab∕Simulink,simulation results demonstrate that the speed and the accuracy of the method are all improved.
partial shading;photovoltaic array;maximum power point tracking;dynamic differential evolution algorithm
TM615
A
10.19457∕j.1001-2095.20170711
2016-06-15
修改稿日期:2016-10-31
黑龙江省教育厅资助科技项目(12541071);东北石油大学校内培育基金(XN2014110)
李宏玉(1979-),男,博士研究生,副教授,Email:281002765@qq.com
猜你喜欢
新世纪智能(数学备考)(2021年5期)2021-07-28 06:19:46
文苑(2020年11期)2020-11-19 11:45:11
中国诗歌(2019年6期)2019-11-15 00:26:47
中学生数理化·八年级物理人教版(2017年11期)2017-04-18 11:22:54
数学大王·中高年级(2016年4期)2016-05-14 12:56:02
电测与仪表(2016年24期)2016-04-12 00:21:06
中国光学(2015年5期)2015-12-09 09:00:42
电测与仪表(2015年20期)2015-04-09 11:53:54
信息安全研究(2015年3期)2015-02-28 20:17:57
太空探索(2014年1期)2014-07-10 13:41:50
