
感应电机滑模观测器矢量控制系统研究
2017-08-08 03:01赵有乾尹忠刚伍文俊钟彦儒
电源学报 2017年4期
赵有乾,尹忠刚,伍文俊,杜 超,钟彦儒
(西安理工大学自动化与信息工程学院,西安 710048)
感应电机滑模观测器矢量控制系统研究
赵有乾,尹忠刚,伍文俊,杜 超,钟彦儒
(西安理工大学自动化与信息工程学院,西安 710048)
研究了一种基于滑模观测器的感应电机无速度传感器矢量控制技术。根据感应电机两相α-β静止坐标系下数学模型的特点,设计了一种电流型滑模观测器。利用李亚普诺夫稳定定理,分析和证明了此观测器的稳定性,并在此观测器的基础上,根据等效控制的概念,估算了电机转子磁链和转速。仿真结果表明,基于滑模观测器的感应电机无速度传感器矢量控制技术对于电机启动和突加负载转矩时均能呈现很好的调速性能。
滑模观测器;矢量控制;感应电机
在现代电机控制领域中,感应电机矢量控制技术因其具有优良的控制性能获得了广泛应用。然而,由于速度传感器的使用破坏了感应电机结构简单、可靠、成本低、维护方便等优势,也限制了其应用范围,降低了系统的鲁棒性[1]。因此,无速度传感器控制不仅成为了现代交流传动控制技术的一个重要研究方向,同时也是研究高性能通用变频器的关键技术之一。
随着高性能数字信号处理器的飞速发展,各种转速估计方法层出不穷,主要方法有直接计算法、状态方程合成法、模型参考自适应[2,3]、扩展卡尔曼滤波[4-6]、自适应全阶观测器[7]、高频信号注入法[8,9]和滑模观测器[10-19]等。滑模观测器是一种基于等效控制原理和滑模变结构控制理论的磁链估计方法,对系统数学模型要求较低,在系统参数摄动及外部扰动时具有较强的鲁棒性,成为当前研究的热点。滑模观测器对电机参数有着很好的鲁棒性,在很宽调速范围内也拥有良好的动态性能,具有很好的应用前景。
本文在滑模变结构控制的基础上,研究了一种简单的滑模观测器,并针对无速度传感器矢量控制系统进行了电机转速估计。利用李亚普诺夫稳定定理,分析和证明了此观测器的稳定性。仿真结果表明,基于滑模观测器的感应电机无速度传感器矢量控制技术对于电机启动和突加负载转矩时均能呈现很好的调速性能。
1 感应电机数学模型
假设感应电机的磁动势沿气隙圆周正弦分布,不考虑磁路饱和,忽略铁心损耗,三相感应电动机在两相静止坐标系αβ下的数学模型为
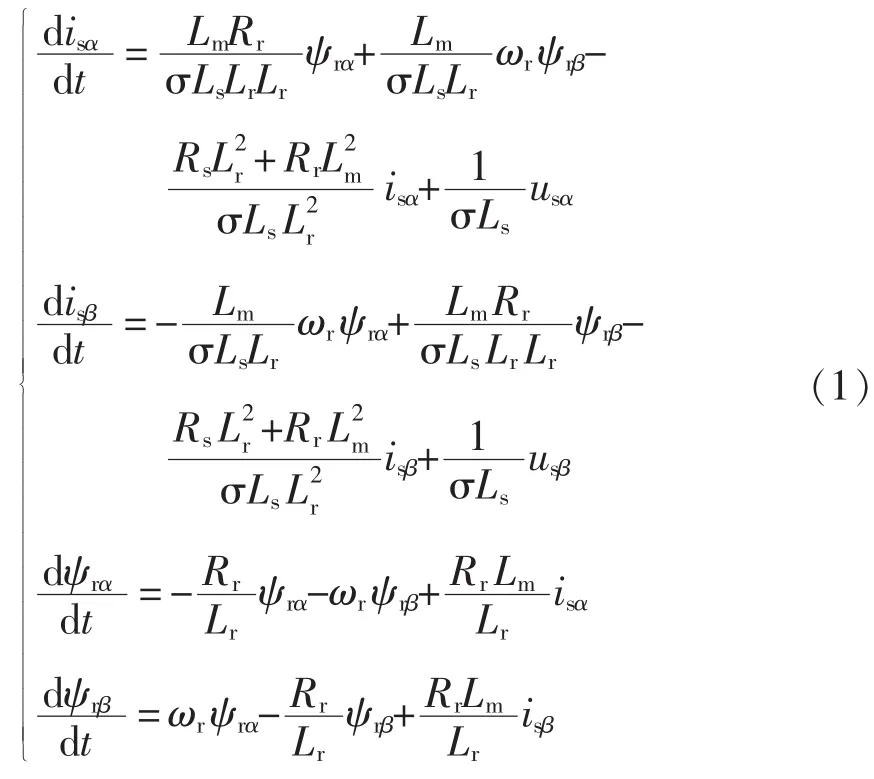
式中:Rs和 Rr分别为定子电阻和转子电阻;Ls、Lr和Lm分别为定子电感、转子电感和定转子之间的互感;ωr为感应电机速度;usα、usβ分别为定子电压在α、β轴上的分量;isα、isβ分别为定子电流在 α、β 轴上的分量;ψrα、ψrβ分别为转子磁链在 α、β 轴上的分量;σ为总漏感系数。
将式(1)转换为矩阵形式,即
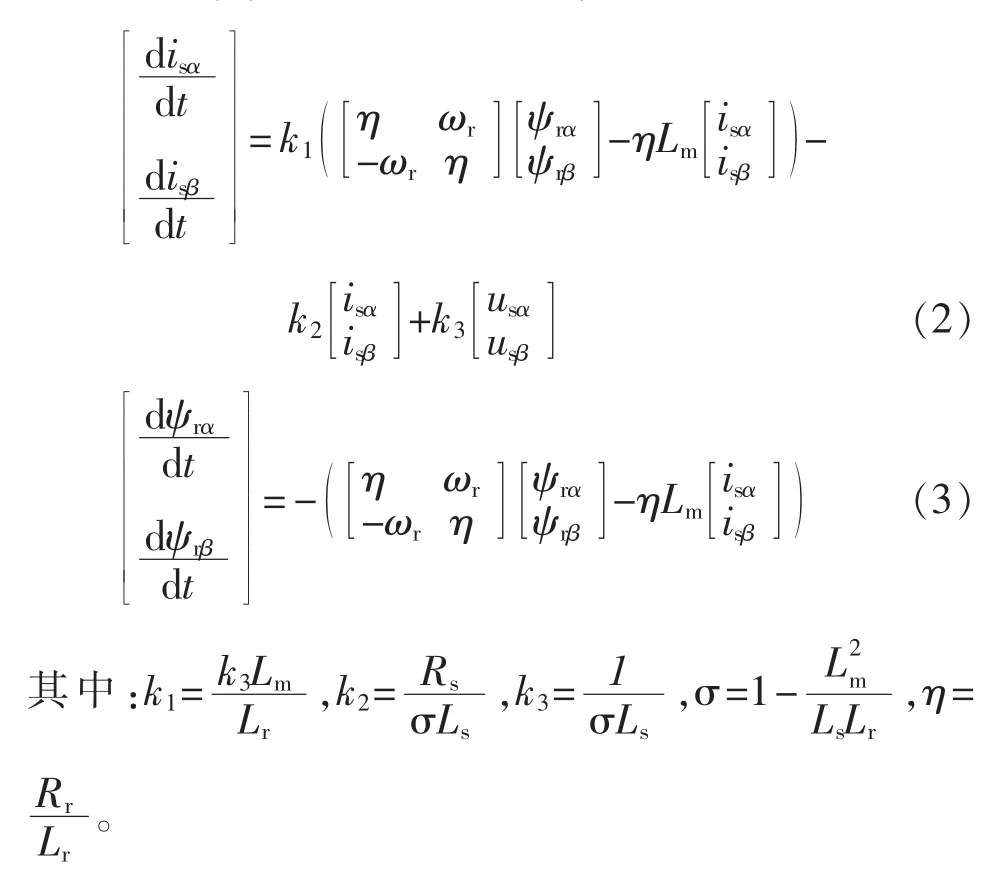
定义矩阵S为

2 感应电机滑模观测器
2.1 滑模观测器
滑模观测器是一种基于理想模型的闭环磁链估计方法,它通过检测的定子电流和定子电压实现对转子磁链和转速的估计。由式(2)和式(3)的感应电机定子电流和转子磁链矩阵方程可以看出,每组矩阵方程中均含有相同的耦合相S,如果S可以用相同的滑模函数F代替,则式(2)和式(3)可分别表示为
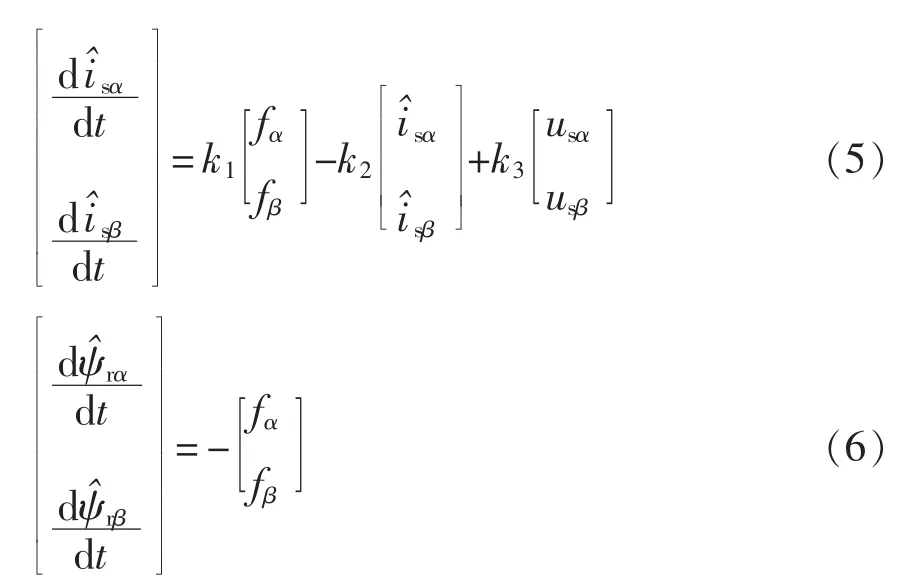
选取滑模函数F为

电流观测器的α轴和β轴分别设计了2个独立的滑模函数 fα和 fβ,这两个滑模函数仅仅依赖于每相电流测量值和估计值的误差。
2.2 转子磁链和转速估计
根据式(6)可以通过滑模函数估算转子磁链,但是采用符号函数的等效控制会引起的高频分量和波动,为了避免该高频分量对功率器件造成损害,采用一阶低通滤波器保留低频分量,过滤掉高频有害分量,该低通滤波器表示为式中:λ为一阶低通滤波器的时间常数;s为一阶低通滤波器传递函数变量。综合各频率段定子电流误差以及系统的采样频率大小,取滤波系数的范围为0.000 1~0.001。

根据式(6)和式(8)可以计算出转子磁链,即

由式(9)可知,在转子磁链估算过程中无需电机转速的信号,因此使系统实现起来比较简单。根据式(3)和式(6)滑模等效代替关系得
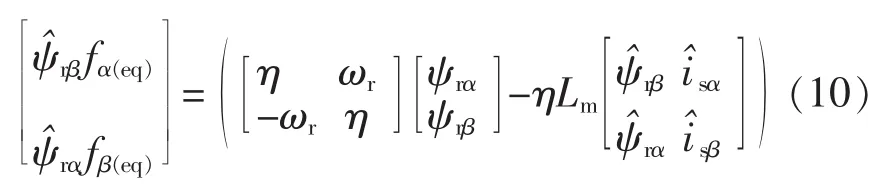
由式(10)可得感应电机转速估计表达式为

图1为模观测器结构框图。由图可以看出,通过定子电压和电流可以实时估算定子电流和转子磁链,最终达到对感应电机转速实时估计的目的。
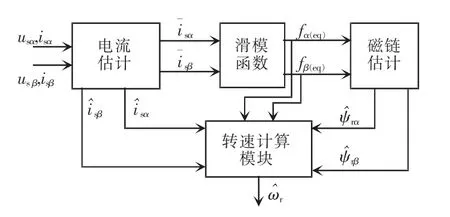
图1 滑模观测器结构框图Fig.1 Block diagram of sliding mode observer
2.3 滑模观测器稳定性分析
Lyapunov函数微分表达式为

将式(2)、式(5)代入式(12)可得
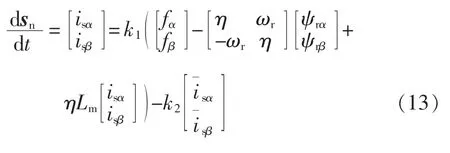
则
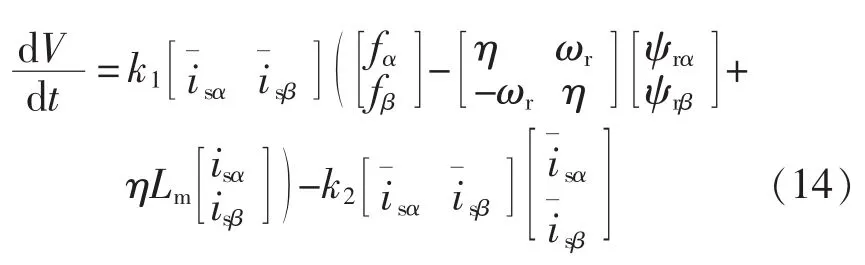
由Lyapunov稳定性定理可知,如果满足条件V>0和dV/dt≤0,则该滑模观测器是稳定的。因此,由式(14)和V˙≤0 可得
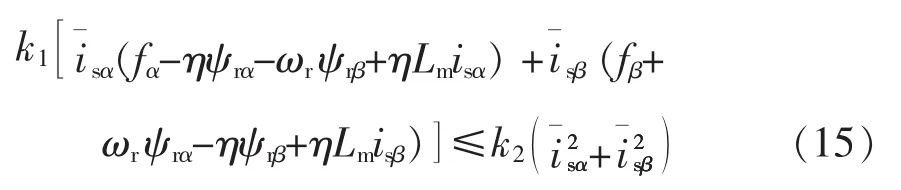
由式(15)可得

其中:A=ηLmisα-ωrψrβ-ηψrα;B=ηLmisβ-ηψrβ+ωrψrα。
将式(7)代入式(16),变形可得
当滑模系数γ0满足式(18)时,则滑动模态将会产生,滑模观测器的稳定条件保证了滑模变量为零,这就意味着该滑模观测器可以估计定子电流和转子磁链,最终实现对电机转速的估计。
2.4 滑模观测器在矢量控制系统中的实现
本文用滑模观测器取代了感应电机矢量控制系统中机械速度传感器,实现了对免疫滑模观测器的感应电机无速度传感器矢量控制系统的研究。图2为滑模观测器感应电机无速度传感器矢量控制系统结构。通过电流传感器检测电机在abc坐标系下的三相电流,经过3r/2s变换转换为两相αβ坐标系下的电流isα、isβ,再将速度外环中的给定转速与由SMO模块估计的反馈速度ωr的误差经过速度外环PI控制器调节后输出转子旋转坐标系下的q轴电流。给定转矩电流和给定励磁电流经过转差计算模块得到转差ωs,然后再与反馈速度ωr经过旋转角度计算后,输出电机转子角θ。两相α-β坐标系下的电流isα、isβ以及电机转子角θ经过2r/2s转换为转子旋转坐标系下的两相反馈计算励磁电流id和转矩电流iq。给定励磁电流与反馈计算励磁电流id相比较,经过电流PI调节之后,得到两相旋转坐标的d轴输出电压;转矩电流与反馈计算转矩电流iq相比较之后,经过电流PI调节后,得到d-q坐标下输出电压。d-q坐标系下的两相电压与经过2r/2s变换转换为α-β坐标系下的两相电压、,经过 PWM 调节,产生 PWM 波,经过三相逆变器,驱动感应电机工作。
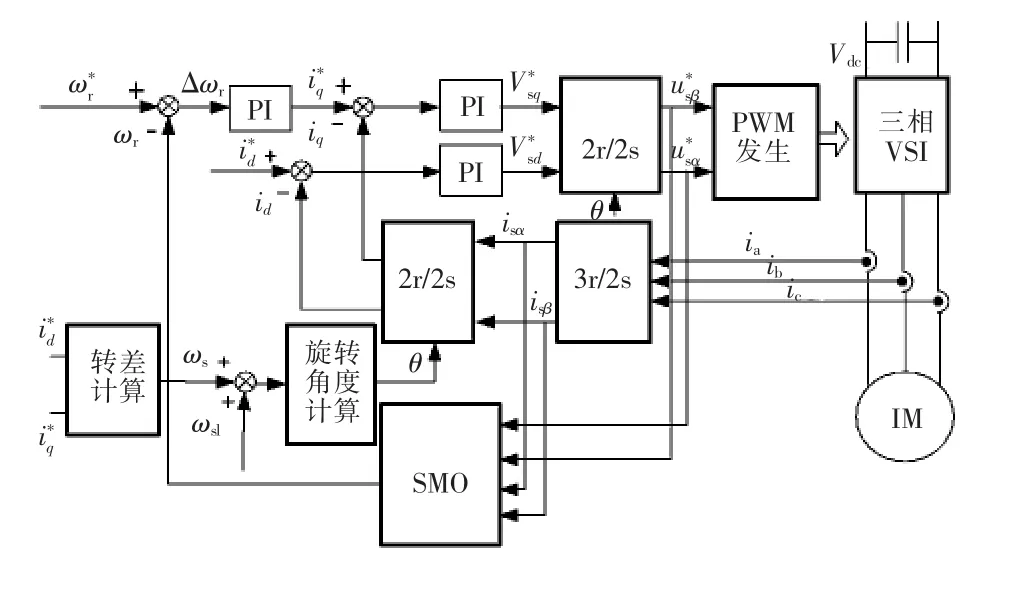
图2 滑模观测器感应电机无速度传感器矢量控制框图Fig.2 Block diagram of sensorless vector control of induction motor based on sliding mode observer
3 仿真验证
本文利用Matlab/Simulink仿真软件对此矢量控制系统性能进行了仿真验证,感应电机的参数如表1所示。综合考虑仿真速度和仿真效果,滤波系数取为0.000 5。
仿真中,初始给定转速为1 500 r/min,t=2.5 s时阶跃至300 r/min,在t=5 s时阶跃至750 r/min。图3为采用SMO实际转速和估计转速对比波形以及三相定子电流波形。由图可见,SMO在较大转速范围表现出良好的静态性能,在转速指令发生正向或负向阶跃时均表现出良好的动态跟踪性能。
给定转速1 500 r/min空载时的SMO起动波形如图4所示。图4(a)为采用SMO时估计转速与实测转速对比波形,此时估计转速超调为80 r/min,调节时间为0.45 s,图4(b)为采用SMO时转速估计误差波形,由图可见,在调速过程中SMO最大转速估计误差为60 r/min,进入稳态后SMO转速估计误差为0.5 r/min。
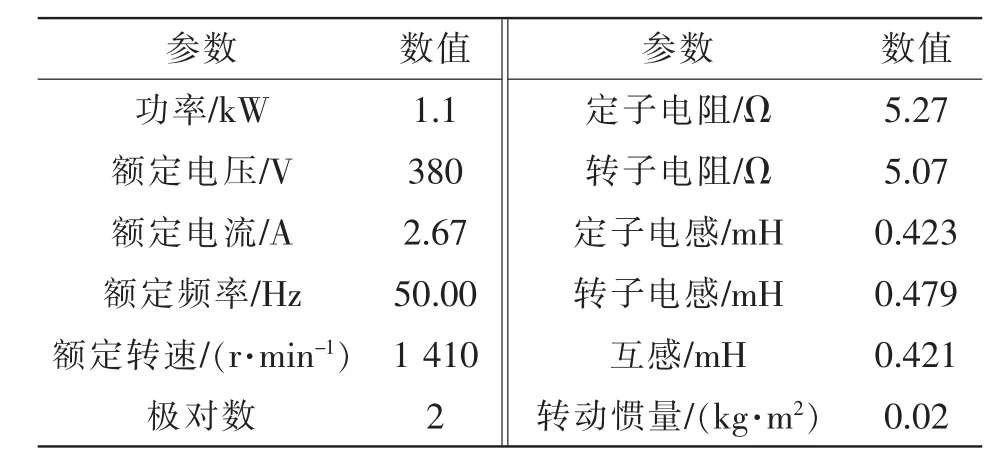
表1 感应电机参数Tab.1 Parameters of the induction motor
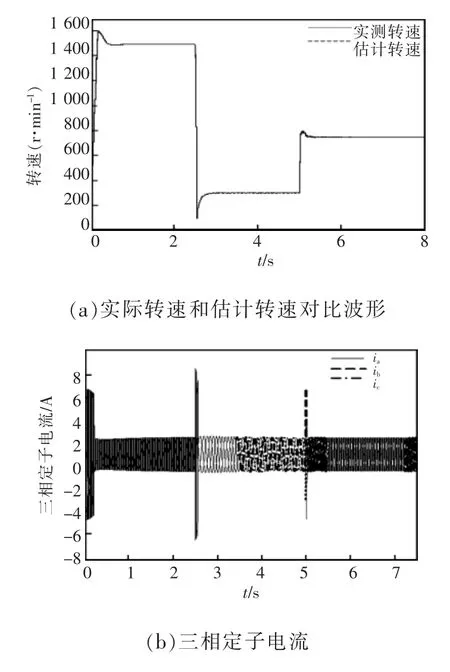
图3 跟踪性验证波形Fig.3 Verification waveforms of tracking
图5为额定转速 1 500 r/min,2.5 s时突加5 N·m的负载转矩时,采用SMO感应电机的估计转速和实测转速对比波形。由图可以看出,2.5 s突加5 N·m负载时SMO估计转速下降25.2 r/min,实测转速下降31 r/min,最大转速估计误差为8 r/min;经过0.3 s进入稳态,估计转速有1.0 r/min的波动,此时转速估计误差为1.2 r/min。
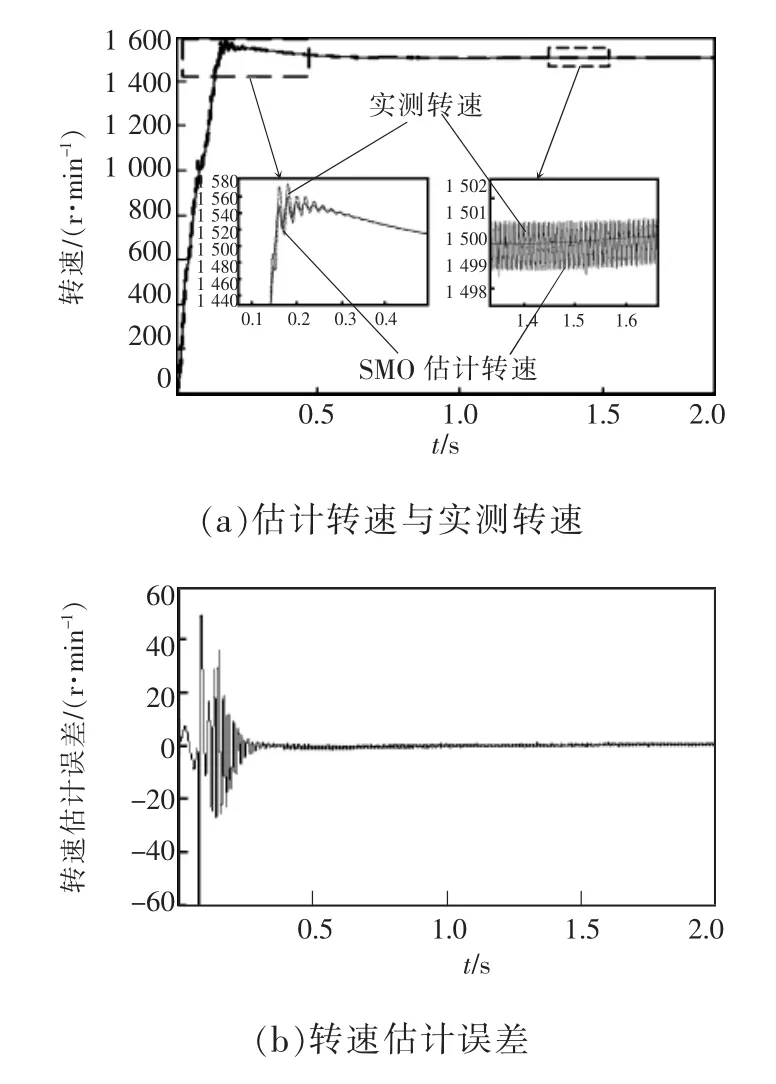
图4 起动时SMO波形Fig.4 Waveforms of SMO when start-up
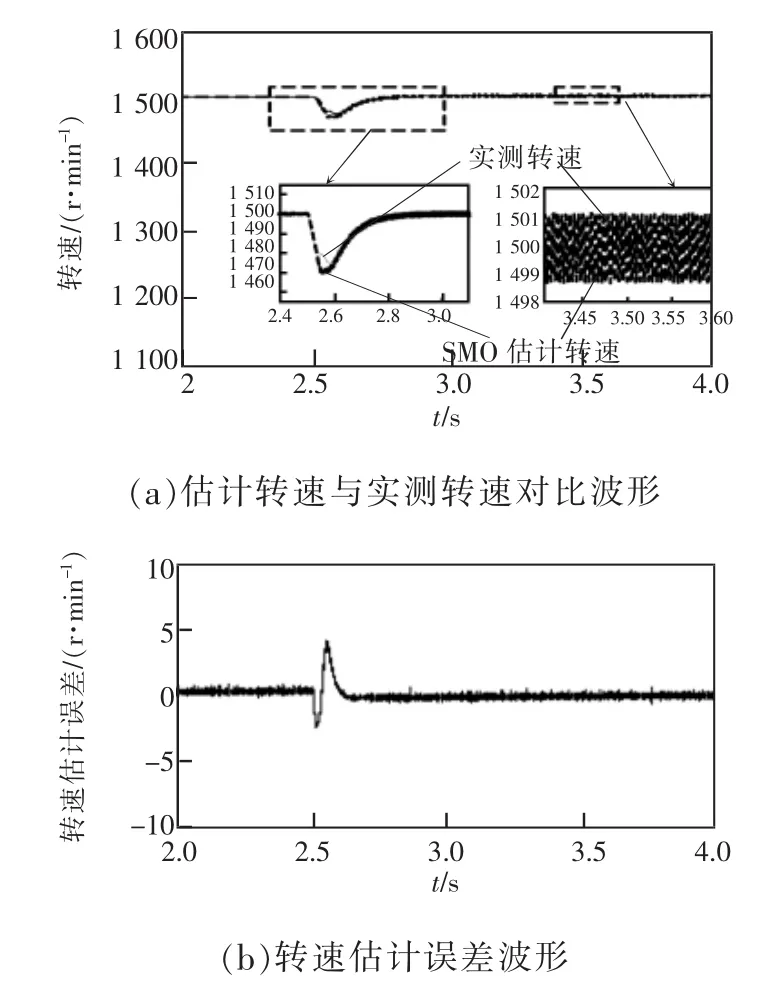
图5 加载时SMO波形Fig.5 Comparison waveforms when upload
4 结语
本文研究了一种基于滑模观测器的感应电机无速度矢量控制技术。通过李亚普诺夫稳定性定理分析和证明了此观测器的稳定性。利用Matlab/Simulink验证了滑模变结构算法在估算感应电机速度信息时的准确性和可行性,完成了感应电机无速度传感器矢量控制。仿真结果表明,滑模观测器可以对速度进行可靠估算,能够快速准确地跟随速度的变化。
[1]黄哲,惠浩浩,韩龙飞,等.基于单元串联的无速度传感器矢量控制算法研究[J].电源学报,2014,12(1):66-73.
Huang Zhe,Hui Haohao,Han Longfei,et al.Study of speed sensorless vector control algorithm in cell-cascaded inverter[J].Journal of Power Supply,2014,12(1):66-73(in Chinese).
[2]Orlowska-Kowalska T,Dybkowski M.Stator-current based MRAS estimator for a wide range speed-sensorless induction-motor drive[J].IEEE Transactions on Industrial Electronics,2010,57(4):1296-1308.
[3]尹忠刚,刘静,钟彦儒,等.基于双参数模型参考自适应的感应电机无速度传感器矢量控制低速性能[J].电工技术学报,2012,27(7):124-130.
Yin Zhonggang,Liu Jing,Zhong Yanru,et al.Low-speed performance for induction motor sensorless vector control based on two-parameter model reference adaption[J].Transactions of China Electrotechnical Society,2012,27(7):124-130(in Chinese).
[4]陈振锋,钟彦儒,李洁,等.基于改进磁链观测器的感应电机转速辨识[J].电工技术学报,2012,27(4):42-47.
Chen Zhenfeng,Zhong Yanru,Li Jie,et al.Speed identification for induction motor based on improved flux observer[J].Transactions of China Electrotechnical Society,2012,27(4):42-47 (in Chinese).
[5]尹忠刚,张瑞峰,曹钰,等.基于扩展卡尔曼滤波器的永磁同步电机转速估计方法研究[J].电源学报,2013,11(2):74-77.
Yin Zhonggang,Zhang Ruifeng,Cao Yu,et al.Speed estimation method of permanent magnet synchronous motor based on extended kalman filter[J].Journal of Power Supply,2013,11(2):74-77(in Chinese).
[6]Ran Zhengyun,Li Huade,Chen Shujin.Application of optimized EKF in direct torque control system of induction motor[C].First International Conference on Innovative Com-puting,Information and Control,2006:331-335.
[7]Etien E,Chaigne C,Bensiali N.On the stability of full adaptive observer for induction motor in regenerating mode[J].IEEE Transactions on Industrial Electronics,2010,57(5):1599-1608.
[8]Bolognani S,Calligaro S,Petrella R,et al.Sensorless control of IPM motors in the low-speed range and at standstill by HF injection and DFT processing[J].IEEE Transactions on Industry Applications,2011,47(1):96-104.
[9]Lu Kaiyuan,Vetuschi M,Rasmussen P O,et al.Determination of high-frequency d-axis and q-axis inductances for surface-mounted permanent magnet synchronous machines[J].IEEE Transactions on Instrumentation and Measurement,2010,59(9):2376-2382.
[10]路强,沈传文,季晓隆,等.一种用于感应电机控制的新型滑模速度观测器研究[J].中国电机工程学报,2006,26(18):164-168.
Lu Qiang,Shen Chuanwen,Ji Xiaolong,et al.A novel sliding-mode observer for speed-sensorless induction motors[J].Proceedings of the CSEE,2006,26 (18):164-168(in Chinese).
[11]薛力军,胡松华,梁斌,等.不确定性空间机器人自适应Terminal滑模控制方法[J].吉林大学学报:工学版,2010,40(3):800-805.
Xue Lijun,Hu Songhua,Liang Bin,et al.Adaptive terminal sliding mode control for uncertain space robot[J].Journal of Jilin University:Engineering and Technology Edition 2010,40(3):800-805(in Chinese).
[12]李山,肖慧蕙.基于预测控制的双三相异步电机直接转矩控制策略[J].电机与控制应用:2008,35(10):31-35.
LiShan,Xiao Huihui.Direct torque control strategy of dual three phase asynchronous machine based on predictive control[J].Electric Machines&Control Application.2008,35(10):31-35(in Chinese).
[13]Abdel-Khalik A S,Masoud M I,Williams B W.Improved flux pattern with third harmonic injection for multiphase induction machines[J].IEEE Transactions on Power Electronics,2012,27(3):1563-1578.
[14]Kim H,Son J,Lee J.A high-speed sliding-mode observer for the sensorless speed control of a PMSM[J].IEEE Transactions on Industrial Electronics,2011,58(9):4069-4077.
[15]Zaky M S,Khater M M,Shokralla S S,et al.Wide-speed range estimation with online parameter identification schemes of sensorless induction motor drives[J].IEEE Transactions on Industrial Electronics,2009,56(5):1699-1707.
[16]Zaky M S.Stability analysis of speed and stator resistance estimators for sensorless induction motor drives[J].IEEE Transactions on Industrial Electronics,2012,59(2):858-870.
[17]Zheng Libo,Fletcher J E,Williams B W,et al.Dual-plane vector control of a five-phase induction machine for an improved flux pattern[J].IEEE Transactions on Industrial Electronics,2008,55(5):1996-2005.
[18]刘艳莉,张烨,吕继考,等.PMSM改进型滑模观测器无传感器参数辨识[J].电力系统及其自动化学报,2014,26(4):30-34.
Liu Yanli,Zhang Ye,Lyu Jikao,et al.Sensorless parameters identification of permanent magnet synchronous motor by employing hyperbolic tangent function[J].Proceedings of the CSU-EPSA,2014,26(4):30-34 (in Chinese).
[19]王辉,马军,刘红霞,等.基于智能滑模观测器的PMLSM调速系统研究[J].电气传动,2014,44(6):54-57.
Wang Hui,Ma Jun,Liu Hongxia,et al.Research of speed regulating system based on intelligent SMO for PMLSM[J].Electric Drive 2014,44(6):54-57 (in Chinese).
Researches on Vector Control System of Induction Motor Based on Sliding Mode Observer
ZHAO Youqian,YIN Zhonggang,WU Wenjun,Du Chao,ZHONG Yanru
(School of Automation and Information Engineering,Xi’an University of Technology,Xi’an 710048,China)
A sliding mode observer is studied based sensorless vector control for induction motor.According to the characteristics of the two phase static coordinate system,a new type of sliding mode observer is designed.Using Lyapunov stability theorem,the stability of the observer is analyzed and proved.Based on the concept of equivalent control,the flux and speed of the motor rotor are estimated.The simulation results show that the speed sensorless vector control technology based on the sliding mode observer can be applied to the motor starting and load torque.
sliding mode observer;vector control;induction motor

赵有乾
赵有乾(1990-),男,通信作者,硕士研究生,研究方向:高性能变频调速系统控制策略研究,E-mail:zhyq1310@163.com。
尹忠刚(1982-),男,博士,副教授,研究方向:高性能交流调速系统、电机智能控制与电力电子变换器数字化控制,E-mail:smart860@163.com。
伍文俊(1967-),女,博士,副教授,研究方向:三电平变换器及其应用,E-mail:xlgwwj@xaut.edu.cn。
杜超(1991-),男,硕士研究生,研究方向:高性能变频调速系统控制策略研究,E-mail:duchaoworkhard@163.com。
钟彦儒(1950-),硕士,教授,博士生导师,研究方向:高性能交流调速系统与电力电子变换器数字化控制,E-mail:zhongyr@x aut.edu.cn。
10.13234/j.issn.2095-2805.2017.4.119
TM346+.2
A
2015-12-01
国家自然科学基金资助项目(51307139);陕西省工业攻关资助项目(2014K06-29);陕西省教育厅专项基金资助项目(2013JK0998)
Project Supported by National Natural Science Foundation of China(51307139);the Industry Research Project of Shaanxi Provincial(2014K06-29);the Special Funds of the Education Department of Shaanxi Province(2013JK0998)
猜你喜欢
中国惯性技术学报(2019年6期)2019-03-04
测控技术(2018年4期)2018-11-25
测控技术(2018年3期)2018-11-25
电测与仪表(2016年10期)2016-04-12
铁道科学与工程学报(2015年5期)2015-12-24
深空探测学报(2015年3期)2015-12-07
华东理工大学学报(自然科学版)(2015年2期)2015-11-07
电测与仪表(2015年19期)2015-04-09
电测与仪表(2014年23期)2014-04-04
电测与仪表(2014年11期)2014-04-04
