
微角度测量系统中的影响因素分析
2017-08-07 12:03:31倪江利
宿州学院学报 2017年5期
杨 波,倪江利
安徽三联学院基础实验教学中心,合肥,230601
微角度测量系统中的影响因素分析
杨 波,倪江利
安徽三联学院基础实验教学中心,合肥,230601
结合自混合干涉效应的原理和直角棱镜的特点,在所提出的能满足宽范围、高分辨率的微小角度测量系统的基础上,通过更换不同边长的直角棱镜,对比分析了边长对角度测量的影响,给出了利用不同边长的直角棱镜进行测量时的基本理论分析和数值模拟结果,得出了通过选择较长边长的直角棱镜可以进一步提高测量分辨率的结论,为下一步系统地优化和改进奠定了基础。
微角度;直角棱镜;边长;自混合干涉
随着稳定的光电技术的发展,光学测角技术由于具有高灵敏度、高分辨率等优势,越来越广泛地应用于各个领域。目前,最常用的光学测角法主要是全内反射法、环形激光器法和激光干涉法[1-3]。其中,基于传统的双光束激光干涉测角技术的精确度虽然高,但是干涉装置笨重、复杂,并且不易准直[4-5]。自混合干涉测量技术被广泛地应用于许多场合,包括对目标物位移[6]、振动[7]、速度[8]和距离[9]的测量。在自混合干涉测量技术中,激光器输出的激光经外界物体反射或散射后会重新进入激光谐振腔内,从而产生自混合干涉现象。与其他干涉方法相比,自混合干涉测量技术采用单一光路,实验装置更简单,并且具有稳定性良好和低成本等优点,因此更适用于微角度的测量。
目前,已提出的基于自混合干涉的微角度测量方法主要是利用旋转平面镜测量转过的角度[10-11]。当放置于外腔的平面镜进行旋转时,会导致反馈光程改变,而光程每改变半个波长时,输出激光的光功率则会产生一个条纹的移动。然而,这个测角方法的测量范围有限,一旦平面镜旋转的角度过大,反馈回激光器的光就会减少甚至没有光重新进入腔内。并且由于反馈光的强弱会直接影响到自混合信号的产生,所以这种方法很可能会导致自混合信号的衰弱甚至消失,从而产生较大的测量误差,影响微角度测量的精确度。
为了减少对测量范围的限制,本文利用一个直角棱镜来代替原有实验系统中的平面镜,并且通过更换不同边长的直角棱镜,对比分析边长这一因素对微角度测量结果的影响。该方法可以在保证具有较宽测量范围的同时,提高了角度测量的分辨率。
1 测量原理
图1是基于直角棱镜的激光自混合干涉测角系统的装置。该装置中,采用波长为532 nm的微片激光器作为激光光源,从激光器中射出的光束经过分束器后可分成相互垂直的两束光,其中一束光透射进入直角棱镜,经过直角棱镜两次反射后,又从原入射面透射出去,之后再经平面镜反射,最后返回激光器的谐振腔内,从而产生自混合干涉现象。为了能够检测自混合干涉信号,另外一束光要经信号处理系统前的光电二极管检测,接着将实验信号转换成可以被计算机处理的数字信号。在该装置中,直角棱镜被放置于一个圆形转台上,通过旋转转台改变直角棱镜的旋转角度,从而改变外腔长度,最终可以通过条纹计数的方法计算出所测量角度的大小。并且该圆形转台上的直角棱镜是可替换的,在相同的实验条件下,通过更换不同边长的直角棱镜可以获得不同的测量结果,从而进一步对比分析旋转直角棱镜所测得的微角度大小与棱镜边长之间的关系。
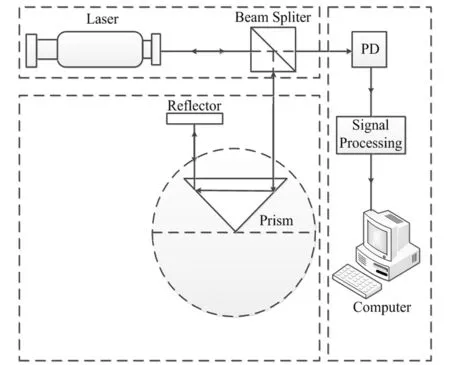
图1 基于直角棱镜的激光自混合干涉测角系统
在该测角系统中,根据直角棱镜的特点可知,无论入射光以多大的角度入射,在直角棱镜内部总是经两个直角边各反射一次,之后又经原入射面,即棱镜斜面透射出去,且透射光与原入射光始终保持平行。因此,通过直角棱镜再经平面镜反射的光可以沿原光路返回到激光谐振腔内,从而产生自混合干涉。并且由于光路不会发生偏转,可以更好地增大测角范围。如图2所示的就是该测角系统中直角棱镜内部的光路原理图。
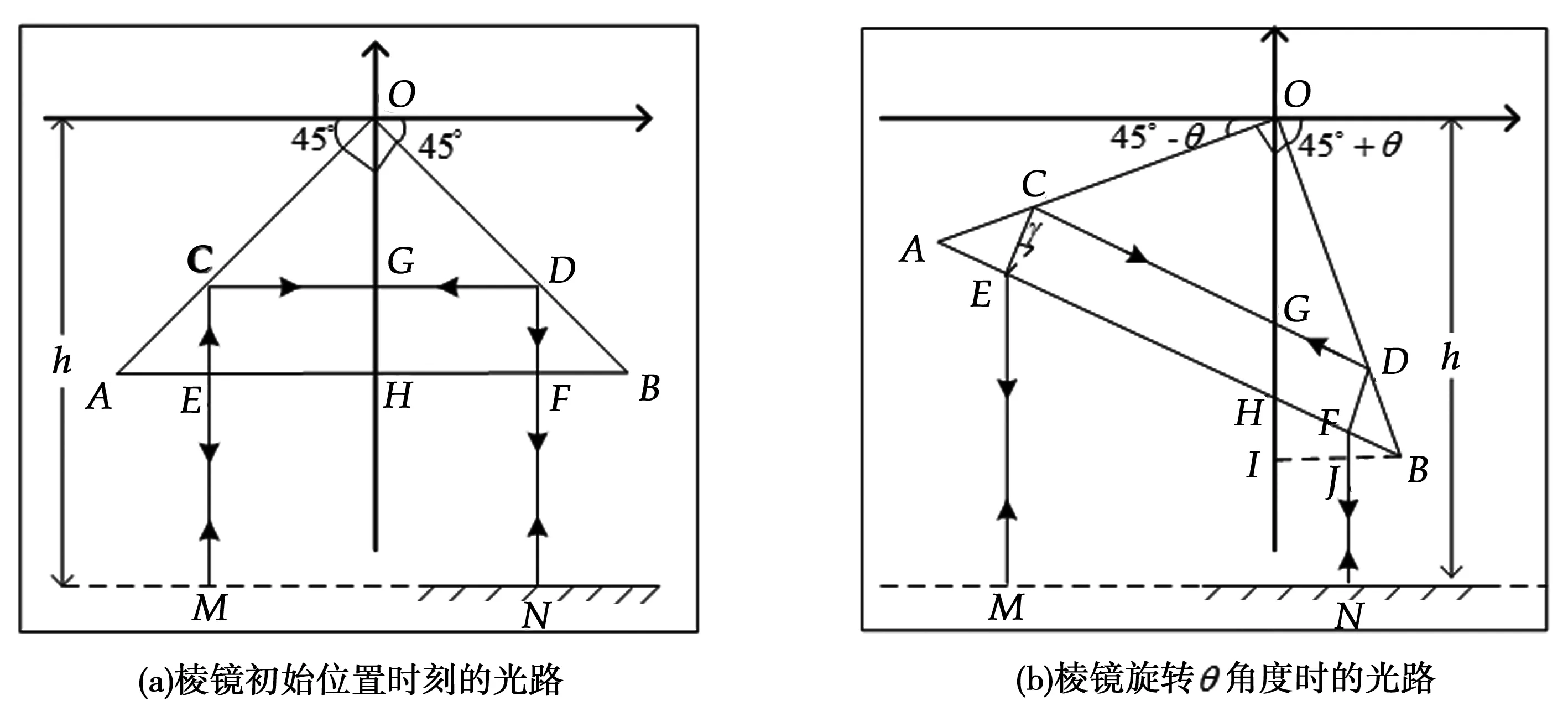
图2 直角棱镜内部光路的原理图
直角棱镜在旋转过程中会导致外腔长度的变化,结合折射定律和理论推导,可以获得随着角度的变化而导致的光程差的变化公式(1)[12]:
(1)
其中,光程差变化的大小是外腔长变化的两倍,式中,θ既是入射角度也是待测的偏转角度,h是平面镜与水平轴之间的距离,a是直角棱镜的直角边长。从光程差的变化公式中可以看出,光程差的大小受棱镜直角边长大小的影响。边长越长,光程差变化越大,从而直接影响微角度的测量范围和测量分辨率。
2 模拟分析
已有的研究主要是分析采用不同波长的激光器作为光源时对测角结果产生的影响。测量中主要选择波长为632.8 nm的氦氖激光器(He-Ne)和波长为532 nm的微片激光器(MSL),在相同边长的直角棱镜的条件下进行对比研究。本文选择直角边长为2 cm的直角棱镜进行模拟分析,得出了如图3所示的输出信号图。从图中可以明显看出,当测角范围达到18 mrad时,用氦氖激光器作为光源时所出现的完整条纹数为5条,而微片激光器作为光源时出现了6条完整的条纹。若将两个波形图置于一个图中可以观察到,用微片激光器作为系统光源测量角度时,出现条纹的位置要早于氦氖激光器,因此,用波长越小的激光器作为光源时可测得的最小角度越小,分辨率也越高。现选择可保持高分辨率的微片激光器作为光源,通过改变直角棱镜的边长,进一步地研究影响该测角系统的因素,从而达到优化系统的目的。
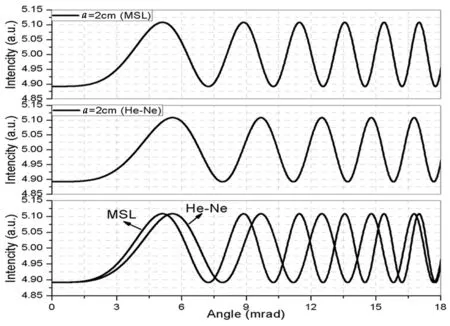
图3 不同波长的激光器进行测量时的模拟输出信号图
为了更深入地分析直角棱镜的边长对激光自混合干涉测角系统的影响,在该系统中分别选取边长各为2、3、5 cm的直角棱镜进行模拟分析,讨论它们对系统测量结果的影响。图4描绘的就是选择不同边长的直角棱镜时模拟出的自混合干涉的输出信号,当外腔长每改变半个波长时,激光自混合波形就移动一个条纹。
模拟结果表明,无论直角棱镜的边长是多少,随着待测角度的增加,反馈光所引起的光程差的变化就越大,因此,自混合干涉条纹都会随着测量角度的增大而逐渐变密,如图4所示。从图中可以看出,当其他测量条件都相同时,自混合条纹数只与直角棱镜的边长有关。并且当测量角度都一致时,不同边长的直角棱镜对应着不同数目的自混合条纹。选择当所测角度都为18 mrad时,2 cm长的直角棱镜对应的自混合条纹数有6条,3 cm长的直角棱镜对应的自混合条纹数有9条,而5 cm长的直角棱镜对应的完整自混合条纹数达到15条。如果只观察第一个条纹的峰值所对应的角度还可以发现,边长为5 cm长的直角棱镜所对应的角度最小,约为3.18 mrad,而边长为2 cm长的直角棱镜对应的角度却为5.06 mrad。因此可以得知,边长的大小直接影响到系统的测量分辨率,边长越长的直角棱镜所对应的可测量的最小角度越小,并且分辨率越高。
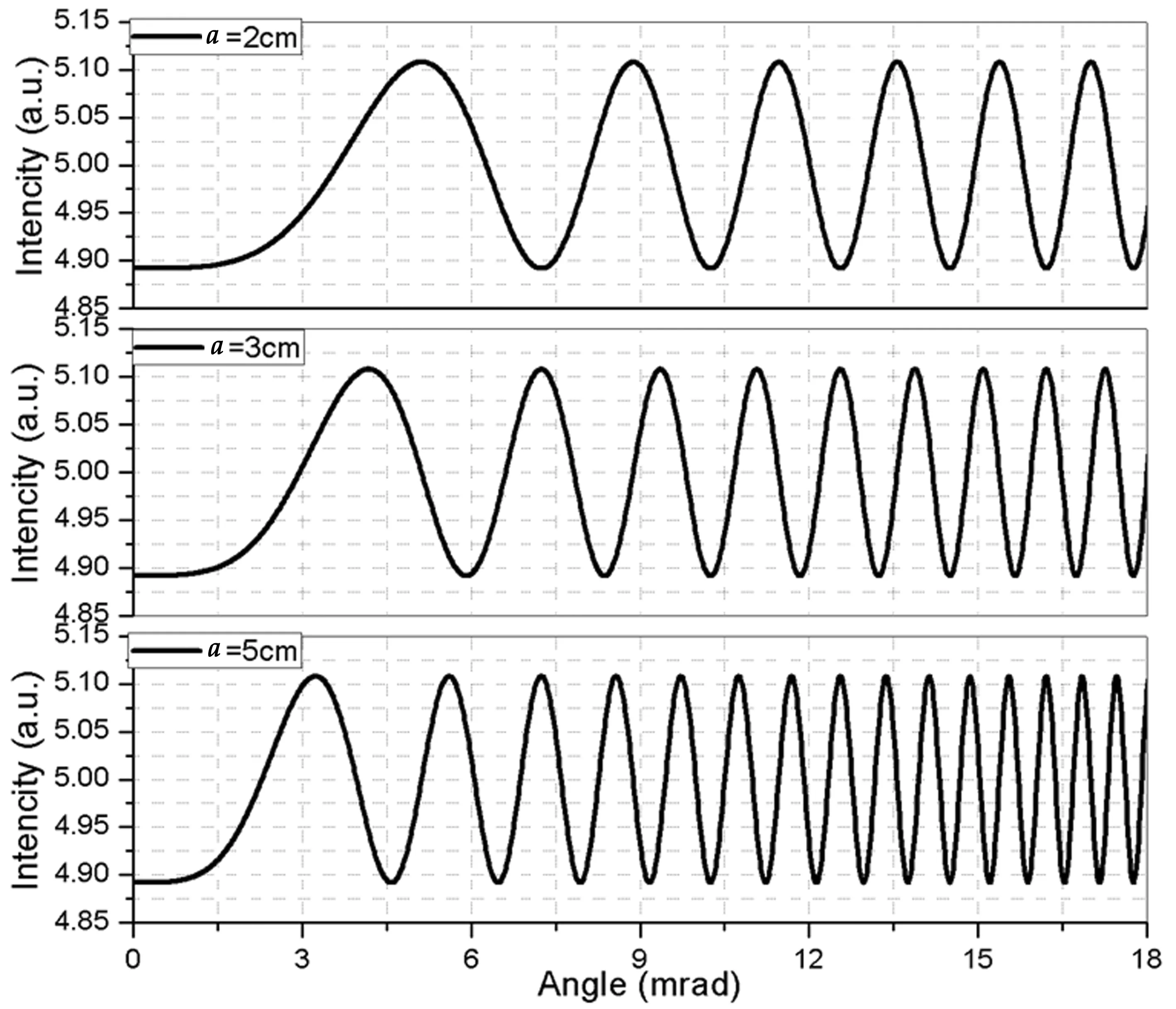
图4 不同边长的直角棱镜进行测量时的模拟输出信号图
由于外腔长每改变半个波长时激光自混合干涉条纹就移动一条,而光程差的变化量是外腔长变化量的2倍,因此,可以令公式(1)等于半波长的倍数,通过数值计算得出不同的条纹数对应不同的测量角度,从而得出如图5所示的对比图。图5中,横坐标显示的是不同的条纹数,为了减小测量误差,每隔半个条纹进行一次计算,纵坐标对应的就是移动不同的条纹数时所得出的测量角度。同时,图中选择了方形的点代表边长为2 cm的直角棱镜进行测量时所得出的结果,圆形的点和三角形的点分别代表边长为3 cm和5 cm的直角棱镜进行测量时所对应的计算结果。
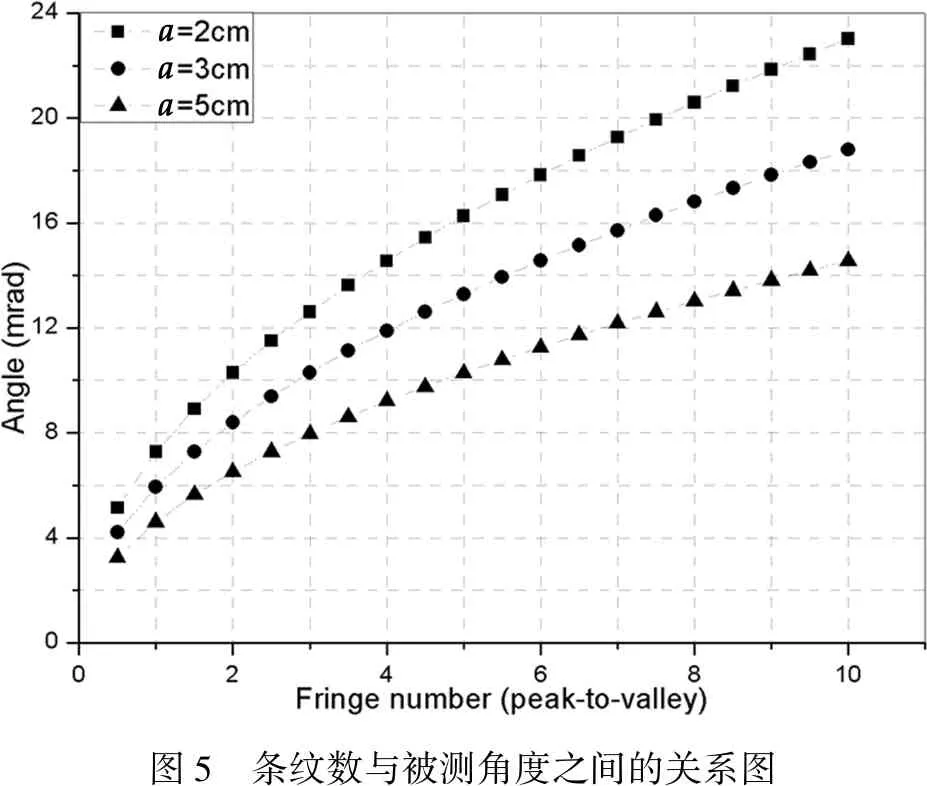
图5 条纹数与被测角度之间的关系图
从图5中可以观察到,边长为5 cm的直角棱镜对应的第一个条纹的峰值位置明显低于边长为2 cm和3 cm的直角棱镜,从而说明基于条纹计数法,用边长为5 cm的直角棱镜进行测量时,可以测量更小的角度,对应的角度为3.25 mrad;而边长为2 cm和3 cm的直角棱镜所对应的测量角度分别为5.14 mrad和4.20 mrad。另外,边长较长的直角棱镜所对应的测量结果的曲线,其斜率的增长速率要低于边长较短的直角棱镜所对应的测量曲线,即对于相同的测量角度,用边长越长的直角棱镜进行测量时会出现越多的自混合干涉条纹,条纹之间的间隔就会越近。若以所测得的前四个角度值为例,能够得到2 cm长的直角棱镜所对应的四个数值之间的角度差分别为2.14、1.63、1.38 mrad,3 cm长的直角棱镜对应于1.74、1.34、1.12 mrad,5 cm长的直角棱镜对应于1.35、1.04、0.87 mrad。因而,用较长边长的直角棱镜进行测量时可以进一步减少测量误差,提高测量分辨率。图5中所显示的这些结果都与图4的模拟结果一致。
3 结束语
本文在自混合干涉测角原理的基础上,提出了通过旋转直角棱镜测量微小角度的方法,采用不同边长的直角棱镜进行测量,分析了边长对微角度测量结果的影响。该微角度测量方法在选定较短波长的激光器作为系统光源的前提下,通过选择合适的较长边长的直角棱镜,可以进一步地提高微角度测量的分辨率,为未来的测角系统的研究和改进提供了很好的理论基础。对激光自混合效应的研究、远距离遥感以及多维度、多通道测量技术的发展同样具有十分重要的意义。
[1]陶卫,浦昭邦,孙运斌.角度测量技术的发展[J] .激光杂志,2002,23(2):5-7
[2]李金阳,吴简彤,韩慧群.小角度测量的光学方法及应用[J].应用科技,2006,33(7):15-18
[3]来颖,沈正祥,王占山,等.基于菲涅尔双棱镜的在轨小角度测量方法[J].红外与激光工程,2016,45(3):239-244
[4] 周星炜,王占斌,袁一方,等.基于光纤Sagnac干涉仪的旋转角度测量系统[J].传感器技术,2005,24(9):53-55
[5]郑德锋,王向朝,李中梁,等.一种使用双棱镜的动态小角度测量方法[J].中国激光,2007,34(9):1255-1259
[6]Usman Zabit,Oliver D Bernal,Thierry Bosch.Design and analysis of an embded accelerometer coupled self-mixing laser displacement sensor[J]. IEEE Sensor Journal,2013,13(6):2200-2207
[7]吕亮,黄样,俞本立.基于激光自混合干涉效应的悬臂梁振动特性[J].中国激光,2012,39(2):184-188
[8]Russell Kliese,Yah Leng Lim,Thierry Bosch,et al.GaN laser self-mixing velocimeter for measuring slow flows[J]. Optics Letters,2010,35(6):814-816
[9]韩道福,俞进,马力,等.环形掺铒光纤激光器自混合散斑及动态目标距离测量[J].激光与光电子学进展,2007(47):76-80
[10]Jingang Zhong,Xianhua Zhang,Zhixiang Ju.Absolute small-angle measurement based on optical feedback interferometry[J].Chinese Optics Letters,2008,6(11):830-832
[11]陈纯,齐攀,钟金刚.基于激光自混合干涉能判别转向的角度测量方法[J].光电子激光,2011,22(3):414-417
[12]杨波.激光自混合微角度测量及相关技术研究[D].合肥:安徽大学物理与材料科学学院,2015:2-64
(责任编辑:汪材印)
10.3969/j.issn.1673-2006.2017.05.028
2017-01-28
安徽省高校自然科学研究一般项目“基于自混合干涉的微角度测量研究”(kjyb2016003);安徽省教育厅自然科学研究重点项目“0.3-3GHz宽带高磁损耗尖晶石/平面六角复合铁氧体研究”(KJ2016A891)。
杨波(1990-),女,安徽六安人,硕士,助教,研究方向:激光自混合干涉技术。
TN247
:A
:1673-2006(2017)04-0098-04
猜你喜欢
中学生数理化·七年级数学人教版(2023年9期)2023-11-30 03:09:24
天水行政学院学报(2022年4期)2022-11-18 09:02:36
小学生学习指导(中年级)(2021年10期)2021-11-01 08:17:08
少儿美术(快乐历史地理)(2020年4期)2020-02-24 13:06:28
小学生学习指导(低年级)(2019年9期)2019-09-25 07:43:28
中学生数理化·七年级数学人教版(2019年4期)2019-05-20 10:03:44
学苑创造·A版(2019年4期)2019-05-10 00:19:52
数学小灵通·3-4年级(2017年12期)2018-01-23 03:37:53
中学生数理化·七年级数学人教版(2017年9期)2017-08-15 00:53:19
中学数学杂志(高中版)(2015年3期)2015-05-28 18:12:20
