基于工程训练的自控行走小车结构设计与优化研究
2017-08-07 04:29:28刘子浪李德荣林沛宣庄集超曾嘉煜
传动技术 2017年2期
刘子浪 李德荣 林沛宣 庄集超 曾嘉煜
(广东海洋大学机械与动力工程学院, 广东 湛江 524088)
基于工程训练的自控行走小车结构设计与优化研究
刘子浪1李德荣*林沛宣 庄集超 曾嘉煜
(广东海洋大学机械与动力工程学院, 广东 湛江 524088)
针对第五届全国大学生工程训练综合能力竞赛(合肥赛)的命题的命题要求,设计出一种运用码盘测距判断位置并作出相应模式切换的自控行走越障小车。小车利用红外传感器检测障碍并通过单片机控制舵机进行转向,设计突变式绕线机构解决上坡问题,采用单向轴承回收利用下坡能量,通过线性延时进行路径优化。
自控行走 无碳小车 工程训练 码盘计数
0 引言
自2009年由教育部高等教育司举办的全国性大学生科技创新实践竞赛活动以来,全国大学生工程训练综合能力竞赛是国家“本科教学质量与教学改革工程”资助赛事之一,也是对工科大学生最具吸引力的竞赛之一。第五届全国大学生工程训练综合能力竞赛(合肥赛)的命题为“重力势能驱动的自控行走小车越障竞赛”, 该题目以自主寻迹避障转向控制功能为亮点,增加了障碍赛道设置(如图1),同时保留往届无碳小车命题重力势能驱动行进的特点。命题要求设计一种三轮小车,通过机械或单片机电控装置实现自动避障、翻越障碍等功能。
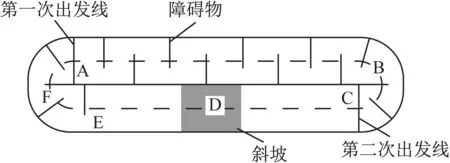
图1 赛道示意图
1 小车的设计思路
“重力势能驱动的自控行走小车越障竞赛”这一命题相比往届的“S”形和“8”形无碳小车是个重大创新,经过研究竞赛具体要求,笔者认为本届比赛的设计难度主要有以下三点:
1) 比赛以通过障碍数和小车行进距离作为评分点,这要求设计充分利用重锤能量,减少行进时摩擦阻力和振动能量损失,使小车跑得尽可能远。
2) 设计出合适的避障算法,通过码盘测距判断出小车所处赛道的不同位置,切换控制模式,优化避障路线,选择最佳避障路线,缩短避障路程。
3) 竞赛赛道上设置有上下坡,考虑到上坡需要小传动比加速,平路需要大传动比稳定速度,设计出“突变式绕线套”改进绕线方式。
2 小车总体设计
针对本次竞赛的题目要求,设计的小车大量采用铝合金材料和3D打印制作,对车轮、底板等质量较大的零件进行镂空处理。考虑到上坡时可能出现的小车后翻问题,齿轮结构放置在重锤与后轮之间,电控部件放置在出的电控托架上,使车身加紧凑;采用单级齿轮传动方案减少传动能量损失,通

图2 小车结构示意图
过突变式绕线套设计解决上坡问题;采用红外避障传感器检测障碍物,降低算法调试难度;采用“减速舵机+单向轴承”的下坡速度控制方案,充分利用下坡能量;采用码盘测距、测速的方法,判断出小车所处的关键位置点,设计出针对不同位置的控制方案。小车加工完成后经过绕圈测试和上下坡测试,最终确定小车的齿轮传动比、车轮直径、绕线套直径等参数。

图3 小车实物图
3 基于码盘测距的模式切换设计
3.1 模式切换与数据采集
考虑到小车处于赛道不同位置时,小车需要进行避障转角、减速开启或关闭、转弯延时等反应动作的特殊处理以保证小车在复杂情况下能完成避障等预设动作,笔者采用槽型光耦传感器和码盘(如图3)进行脉冲计数,根据关系式换算进行测距、测速。通过多次试验,采集小车处于A、B、C、D、E、F位置(如图1)的脉冲计数值并取平均,再结合红外传感器检测信息,综合判断确定出小车所处位置。通过优化处理后,试验小车运行一圈避障效果良好,避障过程速度较稳定,上下坡速度可控。

表1 小车动作模式表
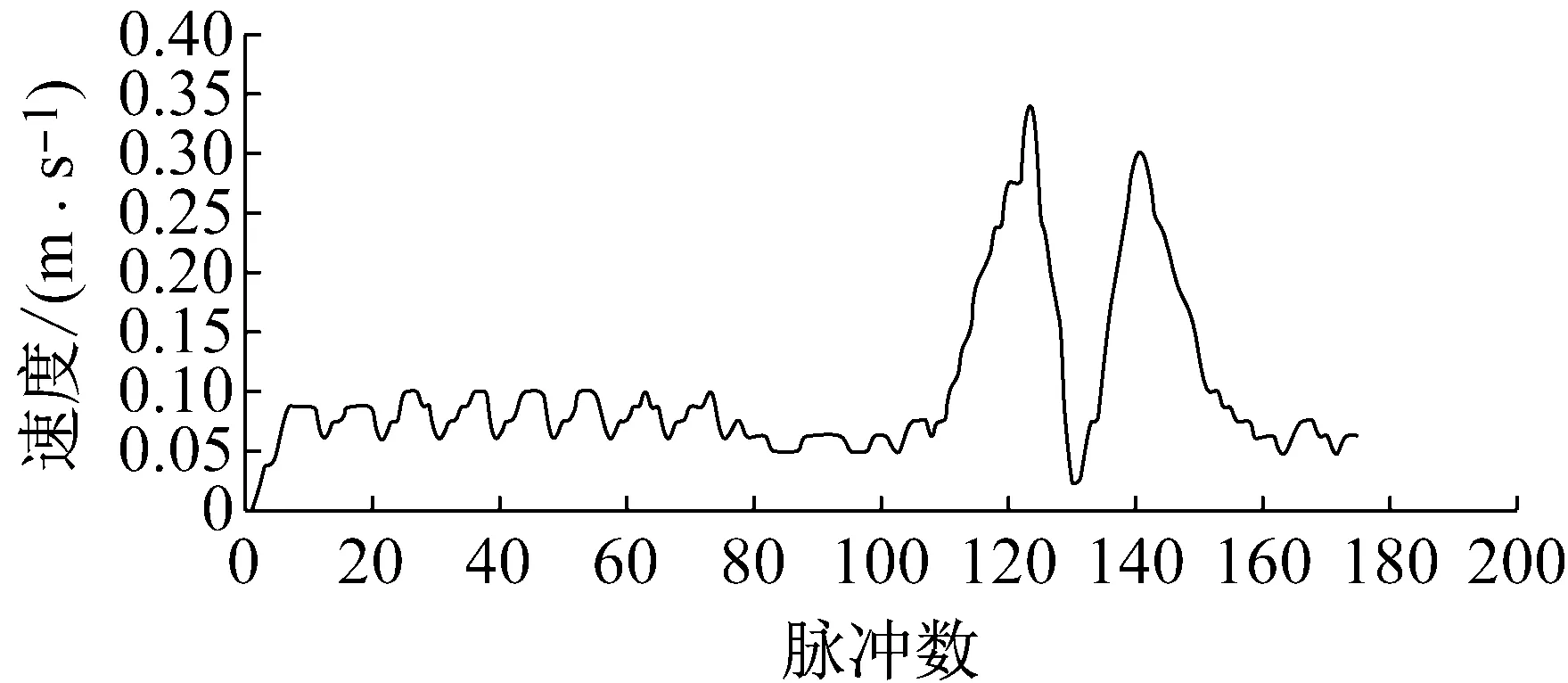
图4 优化处理后速度-脉冲数曲线
3.2 基于线性延时的路径优化
小车在赛道A—B和E-F弯道避障位置行进过程中,红外传感器检测到小车通过障碍后,控制小车往下一个障碍入口方向偏转,然后对中直走,小车最佳行进轨迹应偏转到刚好朝向下一障碍物入口,由于小车行进过程中速度难以保证完全匀速,固定偏转延时易使小车偏离入口位置,笔者通过码盘测速,根据小车的行进速度,线性增加小车避障后转弯延时,通过试验,小车转弯朝向良好,同时具有一定速度稳定效果。
4 突变式绕线轮设计
4.1 绕线轮结构设计
突变式绕线套绕线直径“小-大-小”突变式布置,一端设置有均匀分布的4个螺钉位,(如图6、6)绕线绳通过引线槽、隔挡钉爬上大直径的加速绕线位,绕线套通过单向轴承与传动轴配合,相比其他竞赛者通过舵机换齿轮传动比等方案(如图8),这一设计使小车结构上更简单,控制更方便。
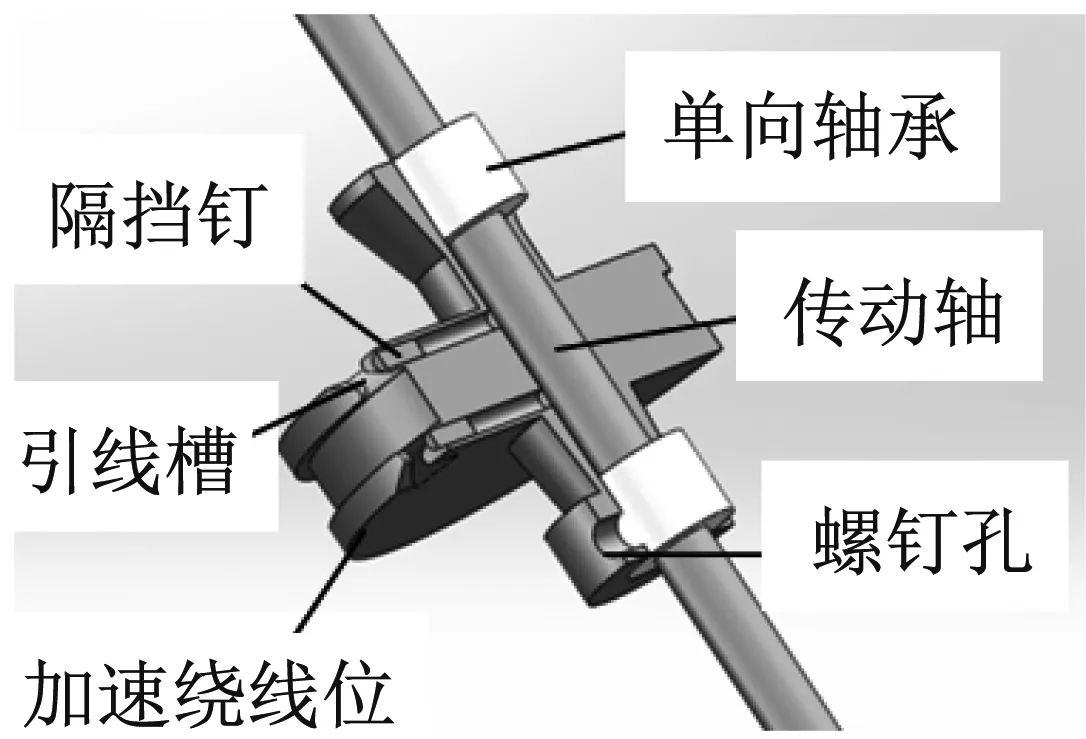
图6 突变式绕线套装配示意图

图7 突变式绕线套实物图

图8 更换齿轮比实物图
经过分析,小车上坡时所需能量来自于坡前速度和上坡时重锤下落的重力势能,坡前速度由加速阶段重锤下落的重力势能和初始速度提供,笔者基于能量守恒定律结合总传动比与行进距离之间的约束关系推导出加速传动比计算公式:
η(mgh+ mgL/i+1/2Mv2)=Mgh
(1)
式中:重锤重量m,总体重量M,小车初始速度v,小车爬行高度h,重力加速度g,能量转换效率η,加速阶段距离L,加速总传动比i。
根据相关文献和多次绕圈测试和上坡试验,测得不同地面材料的η取值在0.4-0.6之间,根据竞赛要求,加速阶段距离L约6000 mm,小车爬行高度h为40 mm,考虑到小车初始速度v较小可忽略,可求得不同地面上坡时所需加速总传动比i取值50-90之间,为应对竞赛实际情况的复杂性,加速传动比选40较为合适,由此可算出绕线套直径37.5 mm。

表2 加速总传动比
4.2 下坡减速能量回收方案
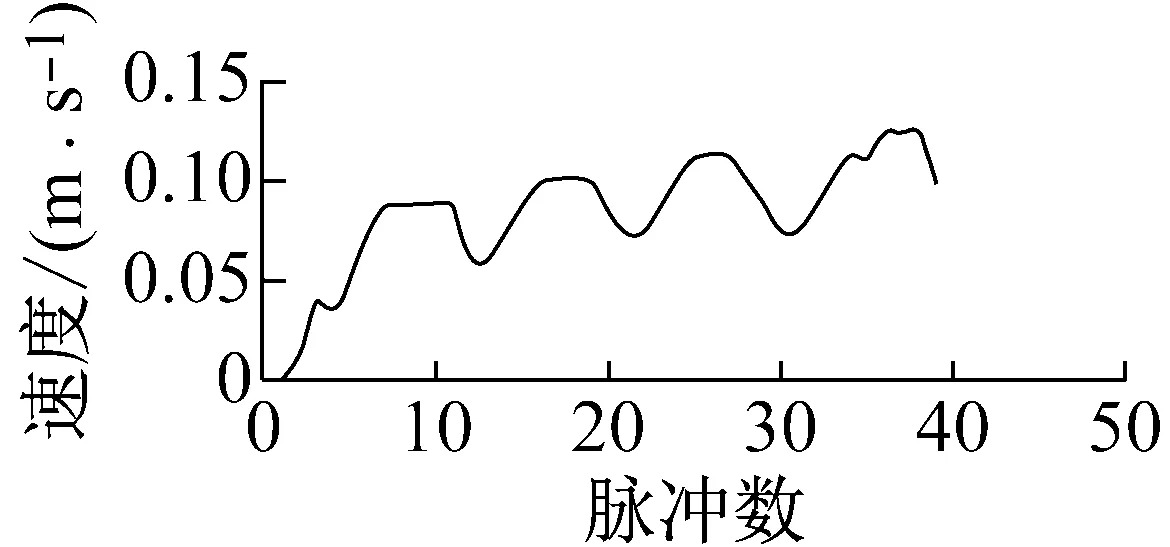
小车上坡到达坡顶时,积累的大量重力势能,如这部分能量不进行处理,下坡时将很容易出现速度过快,转向翻车的问题,如通过电控刹车减速,则浪费了这一重力势能,不符合竞赛“无碳”理念。笔者设计通过减速舵机控制摇臂对绕线套上螺钉进行限位,使重锤无法下落中断小车动力,同时小车在惯性作用下依靠重力滑下斜坡。通过上下坡测试与数据采集,使用舵机减速方案的小车下坡速度幅值较小,能量利用率较高。
5 总语
第五届全国大学生工程训练综合能力竞赛(合肥赛)的命题要求较往届有较大不同,依据命题要求,创新性地提出了码盘测距模式切换、突变式绕线轮、舵机减速能量回收方案、路径优化方案等设计思路,对关键结构设计进行了理论分析和计算,

图9 经下坡减速小车前后速度-脉冲曲线对比
Fig.9 Comparison of velocity - pulse curve before and after downhill
对小车的进行情况进行了数据采集和试验验证,试验效果良好符合预期,可为竞赛者提供理论依据和实践指导。
[1] 徐岩.基于工程训练大赛作品无碳小车进行实物仿真的研究[J].现代企业教育,2011.
[2] 王斌,王衍,李润莲,等.“无碳小车”的创新性设计[J].山西大同大学学报,2012,28( 1) : 59-62.
[3] 闻邦椿.机械设计手册[M].北京: 机械工业出版社,2010.
Research on the structure design and optimization of automatic walking trolley based on engineering training
LiuZilang1LiDerong*LinPeixuanZhuangJichaoCengJiayu
(MechanicalandPowerEngineeringCollegeofGuangdongOceanUniversity,ZhanjiangGuangdong, 524088China)
according to the Fifth National College Engineering Training Competition (Hefei cup) of the proposition, design a kind of application code ranging judge the position and make the corresponding mode switching control of walking and climbing obstacle car. The car using infrared sensors to detect obstacles and turn through the MCU control actuator design mutation type winding mechanism solves the problem of uphill, downhill energy recovery and utilization of the one-way bearing, the path is optimized by linear time delay.
automatic control carbon free car engineering training code countin
1006-8244(2017)02-041-04
广东海洋大学大学生创新创业训练计划项目(CXXL2016017);广东省2016年度国家级项目
刘子浪(1994-),男,本科,研究方向为机电一体化,E-mail:982838075@qq.com。
李德荣(1968-),男,硕士,高级实验师,主要研究方向为数字化设计与制造技术、机电自动化装备设计与制造。E-mail:lidr2008@163.com。
U469.79
B
猜你喜欢
设备管理与维修(2022年21期)2022-12-28 07:34:14
文萃报·周二版(2022年23期)2022-06-11 20:55:46
做人与处世(2022年2期)2022-05-26 22:34:53
机械设计与制造(2022年4期)2022-04-28 04:32:10
防爆电机(2020年6期)2020-12-14 07:17:04
制造技术与机床(2019年11期)2019-12-04 05:50:36
科技视界(2019年11期)2019-06-20 01:22:08
数位时尚(幼儿教育)(2018年10期)2018-10-30 02:41:10
电子制作(2017年20期)2017-04-26 06:57:36
红蜻蜓·低年级(2016年6期)2016-05-14 10:50:48