
三角码盘定位机构相对于十字码盘的准确度分析和补偿计算
2022-04-28 04:32:10谢远来留沧海
机械设计与制造 2022年4期
唐 宁,谢远来,蒋 刚,留沧海
(1.中国科学院合肥物质科学研究院,等离子体物理研究所,安徽 合肥 230031;2.中国科学技术大学,安徽 合肥230026;3.西南科技大学制造过程测试技术省部共建教育部重点实验室,制造科学与工程学院,四川 绵阳 621010;4.成都理工大学核技术与自动化工程学院,四川 成都 610039)
1 引言
目前实践中,一般用十字码盘定位机构,利用码盘的计数功能来获得机构所在的位置信息,这种方法适用于在平坦的路面上运行[1]。十字码盘为十字交叉定位码盘,即水平方向(X轴)和竖直方向(Y轴)夹角为90°,通过增量编码器与轮轴相连,编码器测得轮旋转角度即可由路径与旋转角度函数关系得出该轴向的路径长,由X轴和Y轴的位移即可得到相对初始点的位置坐标[2]。但是在实际运行中,路面一般不是非常平整的,如果遇到凸起的障碍物或者凹坑,则轮子行进过程中可能会因为接触不充分,使轮子的旋转受到影响,导致码盘接收到的信号不稳定或者不准确,直接造成测量的位置信息存在误差。文献[3]基于ADAMS与WLSSVR的移动机器人在转弯时被动码盘因打滑产生的定位误差及其补偿方法进行了研究。文献[4]对光电编码器进行了信号补偿和故障诊断两个方面的研究。为了减小位置测量的误差,这里介绍了一种三角码盘定位机构,在保证稳定性的前提下,节省材料,简便加工,尽可能使轮子在任何环境中正常运行,使码盘获得的数据更加准确。
2 结构组成及设计
2.1 Mecanum轮
常见的Mecanum 轮结构特征是有一个轮子骨架,其轮子外缘由一圈可以自由滚动的辊子组成,且从轴向看,辊子形成一个完整的圆形,辊子轴线与轮毂轮轴存在一个夹角,称为辊子偏置角[5]。当辊子偏置角为锐角时,称为常规Mecanum 轮,主要用于四轮机构。当辊子偏置角等于90°时,称为Mecanum正交轮[6],主要用于三轮机构,两种Mecanum轮,如图1所示。因此这里的三角码盘定位机构使用的是Mecanum正交轮。
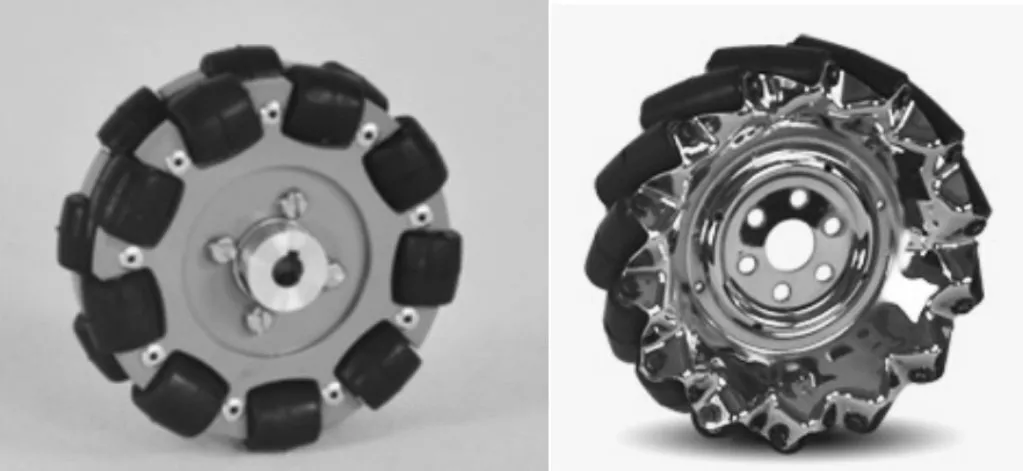
图1 Mecanum正交轮(左)与常规Mecanum轮(右)Fig.1 Mecanum Orthogonal Wheel(left)and Conventional Mecanum Wheel(right)
2.2 编码器
光电编码器是一种将位移或角度的模拟信号转换成相应的电脉冲或数字量角度/角速度的检测元件[7]。工作时,光栅盘与电机同速旋转,同时一个带有辨向狭缝(或狭缝群)的扇形薄片与圆盘平行放置,当光线通过这两个做相对运动的光栅盘时,光敏元件接受到的光通量也时大时小地连续变化,经放大整形电路处理后变成脉冲信号。通过测量捕捉到的脉冲数目和频率即可测出工作轴的转角和转速。而电机的当前转速通过每秒光电编码器输出脉冲的个数可以计算出来[8]。编码器原理图,如图2所示。
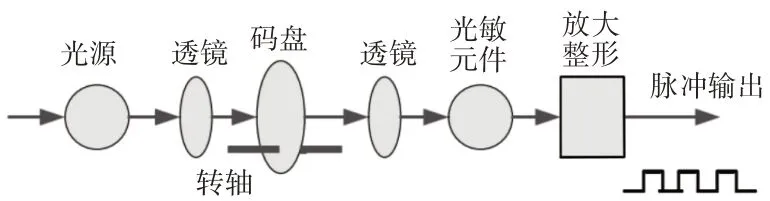
图2 编码器原理图Fig.2 Encoder Schematic Diagram
绝对编码器是直接输出数字量的传感器,绝对式光学编码器图案[9−10],如图3所示。在转轴的任意位置都可读出一个固定的与位置相对应的数字码。绝对编码器有若干编码,根据码盘上的读数信息,检测绝对位置[11]。它的特点是:

图3 绝对式光学编码器图案Fig.3 Absolute Optical Encoder Pattern
(1)可以直接读出角度坐标的绝对值。
(2)抗干扰特性强、数据的可靠性大大提高,没有累积误差。
(3)分辨率是由二进制的位数决定的。
(4)不受停电、干扰的影响,什么时候需要知道位置,什么时候就去读取它的位置信息。
2.3 十字码盘结构
十字码盘由互相垂直交叉的十字支撑架、十字支撑架四个端点安装的四个正交Mecanum轮和两个增量式码盘构成。一般情况下,获得垂直两个方向上的准确位置信息,则测量的结果可信度能满足要求,因此从经济性、可操作性方面考虑,一般在十字架互相垂直的两个方向上各安装一个码盘即可,如图4所示。

图4 十字码盘定位机构Fig.4 Crossbar Positioning Mechanism
一般用十字码盘定位机构,利用码盘的计数功能来获得机构所在的位置信息,这种方法适用于在平坦的路面上运行。但是在实际运行中,路面一般不是非常平整的,如果遇到凸起的障碍物或者凹坑,则轮子行进过程中可能会因为接触不充分,使连接码盘的轮子的旋转受到影响,导致码盘接收到的信号不稳定或者不准确,直接造成测量的位置信息存在误差。
由于平面内三点可以唯一决定一个平面,而十字码盘的四个正交Mecanum轮与地面有四个接触点。如果地面不是理想的平整地面,或者虽然地面平整,但由于制造误差,必然导致某一个轮子的触地点悬空。如果这个悬空的轮子轴上安装了码盘,这时码盘不能准确测量,处于非正常状态,则反馈的位置信息必定存在较大的误差,此时假若其中一个轮子不转动,主要就依据另一个方向上正常运动的轮子反馈信息,很明显反馈的重心位置几乎只与正常转动的轮子重心具有相当大的联系,这样误差非常大;如果悬空的轮子轴上没有安装码盘,则不影响码盘的准确测量。
2.4 三角码盘结构
三角码盘定位机构,主要组成部分是一个正三角形底盘框架,三个正交全向轮,三个码盘,一个万向节-滑块机构[12]。三角形框架,如图5所示。

图5 三角框架Fig.5 Triangular Framework
三角码盘定位机构的底面支撑行走机构不仅需要有一定的承受负载的能力,还需要满足静态和动态的运动稳定性。
由三角形的几何特征可知,等边三角形的重心到三条边的距离相等,且具有最大的静态稳定宽裕量,越容易保证动态稳定性要求,因此最适合用于三角码盘定位机构的支撑行走机构[13]。
三角码盘支撑架为三点决定一个平面,能更大程度地使带有码盘的正交轮正常工作。为了增加三角码盘对地形的适应能力,三角码盘定位机构安装在本体上,通过万向节-滑块机构进行连接。
在三角码盘的重心位置处掏空,安装一个万向节机构,万向节机构伸出部分通过一个滑块机构与本体相连接,设计一个三角码盘定位系统,用三维软件Pro/E建模,如图6所示。
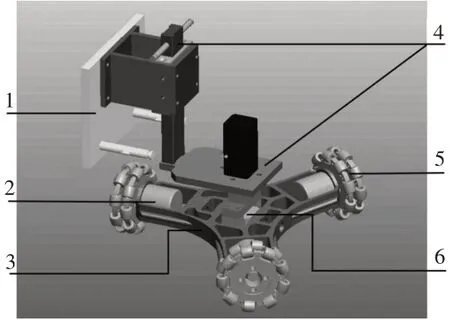
图6 三角码盘定位机构Fig.6 Triangle Encoder Positioning Mechanism
在行进过程中遇到凸起或凹坑障碍物时,三角码盘定位机构安装有三个码盘进行定位,此时假若某一个轮子不转动,还有另外两个轮子正常运行,可以继续对系统重心位置进行拟合,使结果比十字码盘定位机构测量更加可靠,同时,三角码盘可以与本体形成全方位的相对转动,增强本体平稳性,同时万向节-滑块机构可以使三角码盘的轮子与接触面紧密接触,轮子运动受到的干扰减小,尽可能减少障碍物对轮子转动的影响,从而减小码盘测量的误差,使定位更加精确。
由此构成的三角码盘定位机构,在结构设计上添加了一个万向节-滑块机构,可以增加系统的平稳性,并且减少障碍物对码盘定位的影响,提高定位精确度。
3 分析计算
3.1 对十字码盘定位机构的误差补偿分析
根据码盘的测速原理,求得带码盘的轮子运动的速度:

式中:a—第n次读数时码盘位置的示数;
b—第n+1次读数时码盘位置示数;
r—轮子的半径;
t0—采样的周期;
V—轮子运动速度。
十字码盘定位机构的中心在支架交点M处,设机构此时在自身机械坐标系中的运动速度VM,可知沿机械坐标系的X轴,Y轴的速度分量分别为运动半径为R,如图7所示。
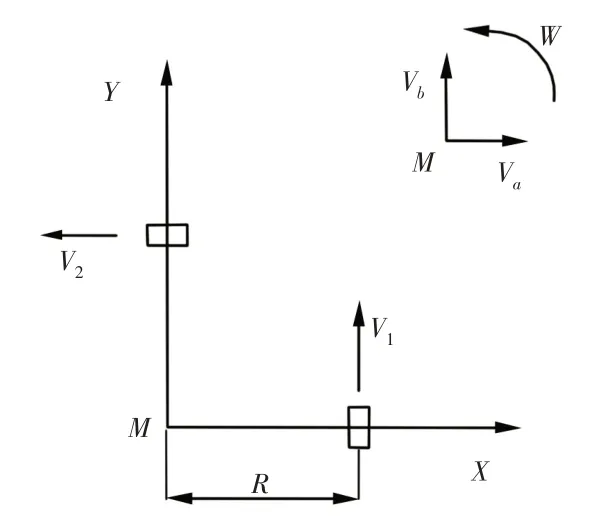
图7 机械坐标系下的十字码盘速度Fig.7 The Speed of Cross Code Disk in Mechanical Coordinate System
则码盘速度与机构中心速度关系为:
由于机械坐标系与世界坐标系不重合,之间存在夹角α,机器人运动角度为β,如图8所示。
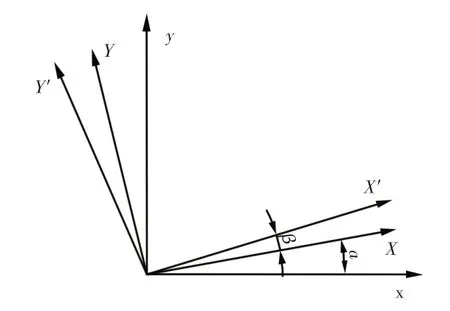
图8 机械坐标系X−Y与世界坐标系x−yFig.8 Mechanical Coordinate System X−Y and World Coordinate System x−y

因此可以由码盘测得的数据推导出此时机器人在世界坐标系中的坐标位置信息:
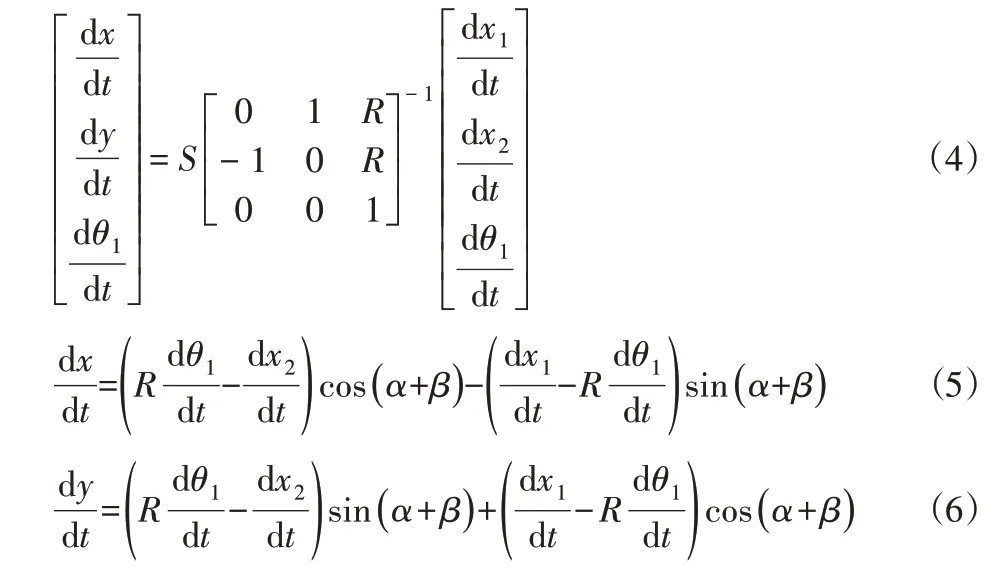
即:

V1=表示分别两个带有码盘的轮子的径向运动速度;
Vx=表示机构在世界坐标系中的位置信息;
W=表示重心运动角速度;
R—机构重心到正交轮中心的支撑架的运动半径;
α—机械坐标系与世界坐标系之间的夹角;
β—两次测量轮子的运动角度。
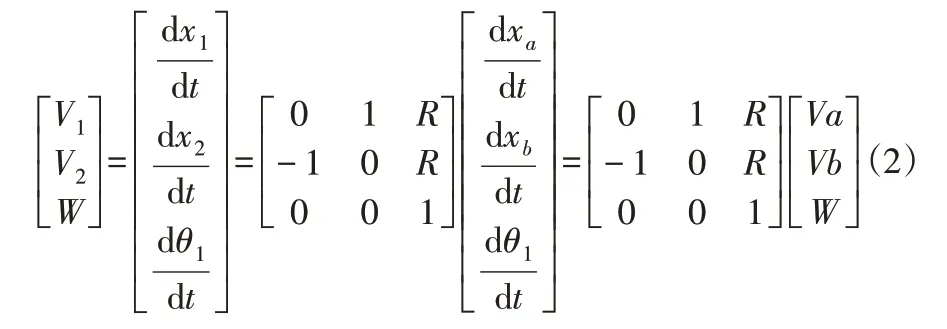
当安装十字码盘时由于制造精度和安装误差等原因造成两个码盘不相互垂直,存在一定的偏角θ时,如图9所示。
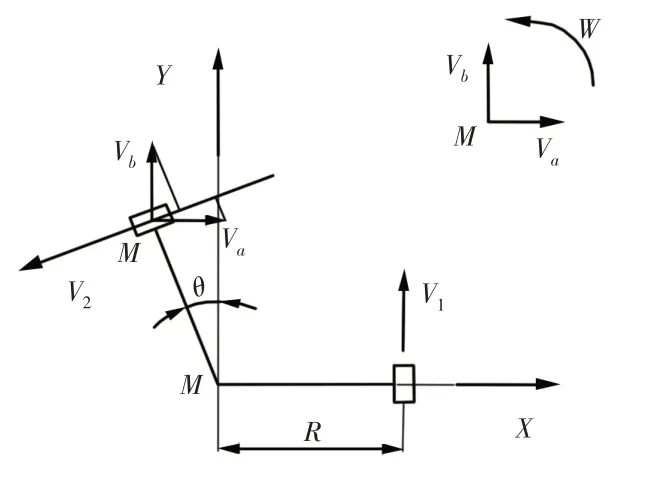
图9 存在误差偏角θFig.9 Existence of Error Deflection Angle θ
则此时的码盘速度与机构中心速度关系为:
由于机械坐标系与世界坐标系不重合,之间的夹角为α,机器人运动角度为β,如图8所示。因此可以由码盘测得的数据推导出此时机器人在世界坐标系中的坐标位置信息:
解得:
对比以上两位置坐标值可得到当两个十字码盘的安装角度误差θ为任意值时,所需要给予的补偿量为:

则补偿量为:

式中:θ—两码盘之间的误差偏角。
3.2 对三角码盘定位系统的误差补偿分析
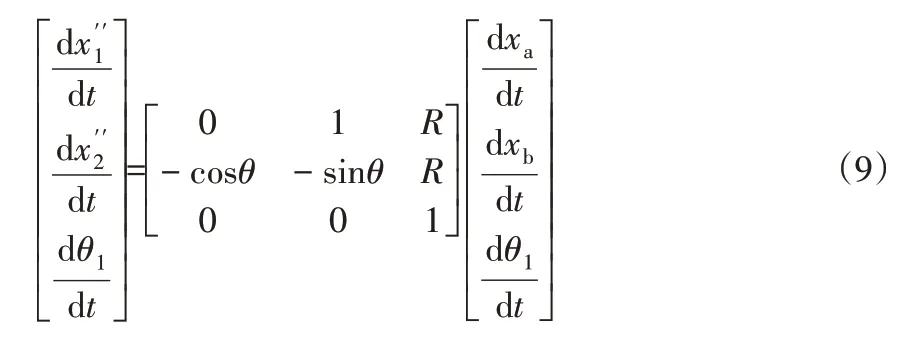
三角码盘的中心在交点N处,同十字码盘定位机构:沿机械坐标系的X轴,Y轴的速度分量分别为角速度为W,运动半径为R,三个码盘的速度分别为。如图10所示。
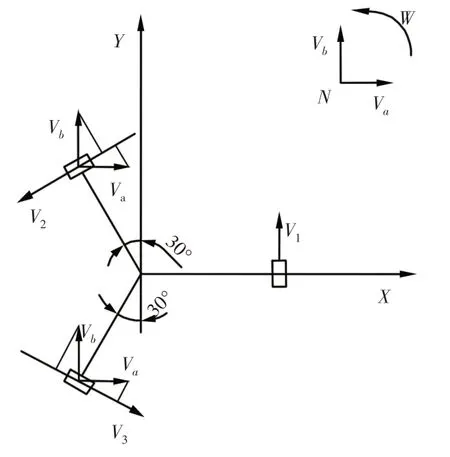
图10 机械坐标系下三角码盘速度Fig.10 Velocity of Triangular Code Disk in Mechanical Coordinate System
则码盘速度与机构中心速度关系为:

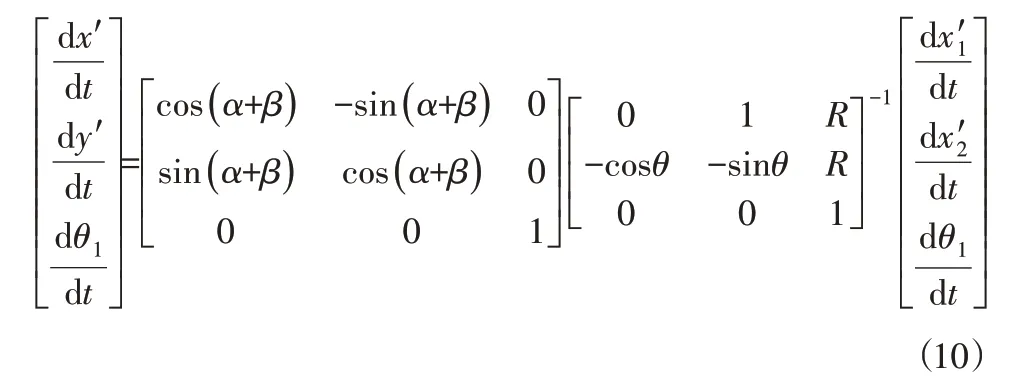
由于机械坐标系与世界坐标系不重合,之间存在夹角α,机器人运动角度为β,因此可以推导出轮子在机器人坐标系下的速度与世界坐标系的速度之间的关系:
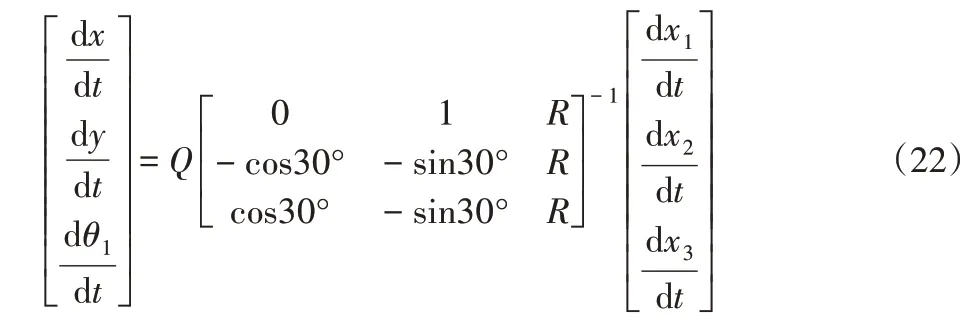
其中:
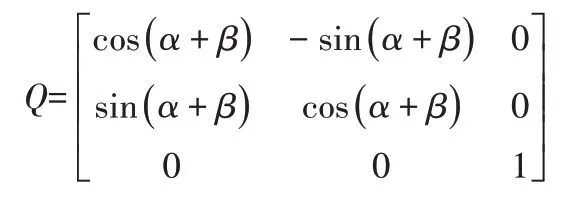
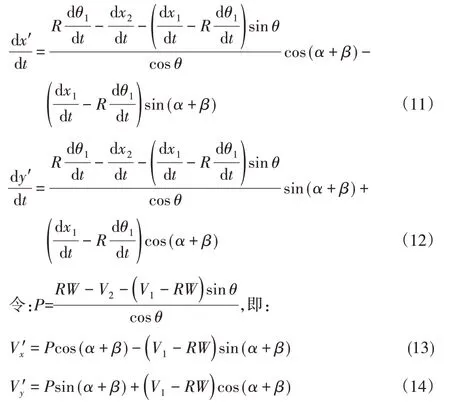
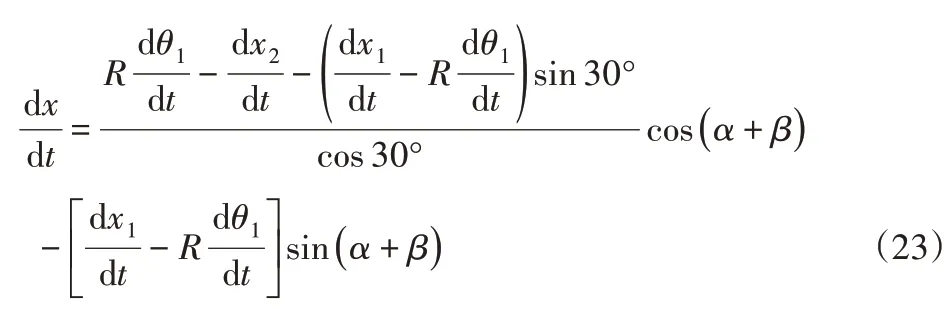
因此,可以由码盘测得的数据推导出此时机器人在世界坐标系中的坐标位置信息:

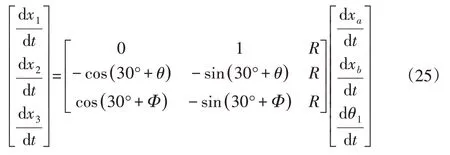
当安装三角码盘时由于制造精度、安装误差等原因造成三个码盘两两之间的夹角不为120°,三个码盘之间,两两分别存在一定的偏角,假设轮1与轮2之间的角度偏差为θ,轮1与轮3之间的角度偏差为Φ,如图11所示。

图11 存在误差偏角θ、ΦFig.11 Existence of Error Deflection θ and Φ
则此时的码盘速度与机构中心速度关系为:
由于机械坐标系与世界坐标系不重合,之间的夹角为α,机器人运动角度为β,如图9所示。因此可以推导出轮子在机器人坐标系下的速度与世界坐标系的速度之间的关系:
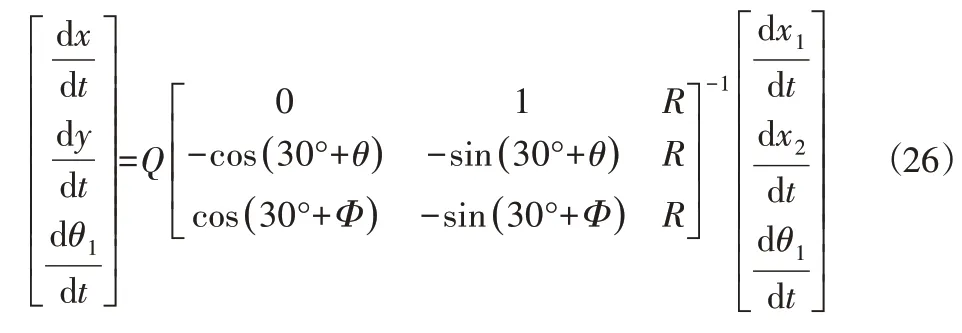
因此可以由码盘测得的数据推导出此时机器人在世界坐标系中的坐标位置信息:
其中,令:

对比三角码盘轮子布置两两之间夹角为绝对120°和存在角度误差θ,Φ时,所需要提供的补偿量为:
对比在假设相同且成立的前提下:码盘沿机械坐标系的X轴,Y轴的速度分量分别为运动半径为R,由于机械坐标系与世界坐标系不重合,之间存在夹角α,机器人运动角度为β,对十字码盘和三角码盘进行对比可知:十字码盘的误差补偿计算更加简单方便,但是三角码盘的补偿计算更加准确,因此可根据实际需要,选择不同的码盘定位方法与结构。
4 应用
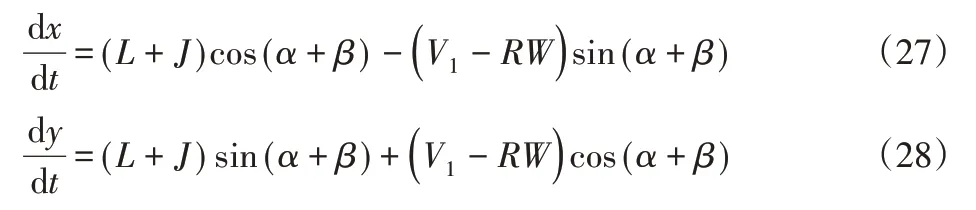
这里设计的三角码盘定位机构已经应用于国家科技部重大科学仪器开发专项“基于小型加速器中子源的可移动式中子成像检测仪”(项目编号:2012YQ130226)子任务“多功能承载系统的研制”(任务编号:2012YQ13022602)的研究之中。根据理论上设计的结构,做出了相应的样机,在实际应用过程中也获得了比较好的精度,实验证明三角码盘机构相对于十字码盘机构具有更好的准确性和稳定性。三角码盘实物,如图12所示。
图12 三角码盘装配实物图Fig.12 Triangular Code Disk Assembly Physical Drawing
5 结论
这里主要阐述了Mecanum轮简介、编码器概述、三角码盘支撑架结构以及三角码盘与机体的连接机构,给出了十字码盘与三角码盘的三维模型图,介绍了目前常用的十字码盘定位机构,并详细介绍了这里提出的三角码盘定位机构的结构组成以及各结构的功能。利用几何关系求出了十字码盘和三角码盘在结构上由于存在制造和安装误差,即两个编码器之间夹角不绝对为90°或120°时,列出各参数公式,并计算出码盘的修正公式,可以用于对不同码盘定位方式的定量修正。同时对十字码盘和三角码盘的定位方式进行比较,可以得出三角码盘定位机构相对于十字码盘定位机构有如下几个优点:
(1)根据码盘的工作原理,三角码盘定位机构在遇到障碍物时,任何方向上运行都始终至少有一个轮子正常运行,使得相应码盘的反馈值准确输出,所以三角码盘更适用于大多数情况。
(2)三角码盘的机构设计使得其重心在运行过程中几乎不改变,利用万向节−滑块机构使其尽可能大地与运动面贴合,减小运动中障碍物对轮子转动造成的影响。
(3)机构只要重心位于三角形之内,便可以满足静态稳定性要求,在设计其他零部件安装位置时也比较方便,并且正三角形结构使得系统在各个方向上的静态稳定裕量相等且最大,同时三角形框架的承载性能也更加优越。
(4)三角码盘的两个补偿分量相对十字码盘的补偿分量更方便计算。
猜你喜欢
文史春秋(2022年4期)2022-06-16 07:12:52
小学科学(学生版)(2021年7期)2021-07-28 06:44:34
数学大王·趣味逻辑(2021年3期)2021-03-10 11:21:26
幼儿园(2020年22期)2020-03-29 02:17:54
中学语文(2019年31期)2019-12-05 04:54:10
科技视界(2019年11期)2019-06-20 01:22:08
汽车观察(2018年12期)2018-12-26 01:05:24
数学大世界(2018年1期)2018-04-12 05:39:05
家教世界·创新阅读(2016年2期)2016-05-30 20:28:23
新媒体研究(2014年21期)2014-12-16 20:45:26
