
基于转速的电磁轴承控制参数自整定研究
2017-07-26 00:53:02李乃安陈宁任正义
轴承 2017年5期
李乃安,陈宁,任正义
(哈尔滨工程大学 工程训练中心,哈尔滨 150001)
目前,电磁轴承技术应用于越来越多的工程领域,特别是军工和航天技术[1]。实际应用中的电磁轴承必须在其转速范围内可靠运行,并能够通过控制器的调整使转子迅速恢复到合理的振动范围内[2]。针对PID控制器不能实现参数在线整定问题,文献[3]提出了基于模糊控制规则的专家控制方法。文献[4]以恒温炉温控系统为对象,实现了对温度的模糊控制。文献[5]以ARM7 S3C44B0X处理器为平台,完成了参数自整定模糊PID控制器的硬件设计。
在上述研究的基础上,尝试运用模糊控制理论将电磁轴承转子转速作为模糊化接口的输入变量,解模糊化接口的输出变量为控制器参数,以满足电磁轴承在不同转速下对控制器参数的要求。
1 电磁轴承数学模型
电磁轴承控制系统(图1)主要包括控制器、功率放大器、位置传感器、磁悬浮轴承的定子和转子。图1中O为定子质心;O1为转子质心。电磁轴承控制器输出的矫正信号经过功率放大器变成电流,以差动方式驱动电磁铁产生电磁吸力,强迫转子恢复到稳态位置[6]。
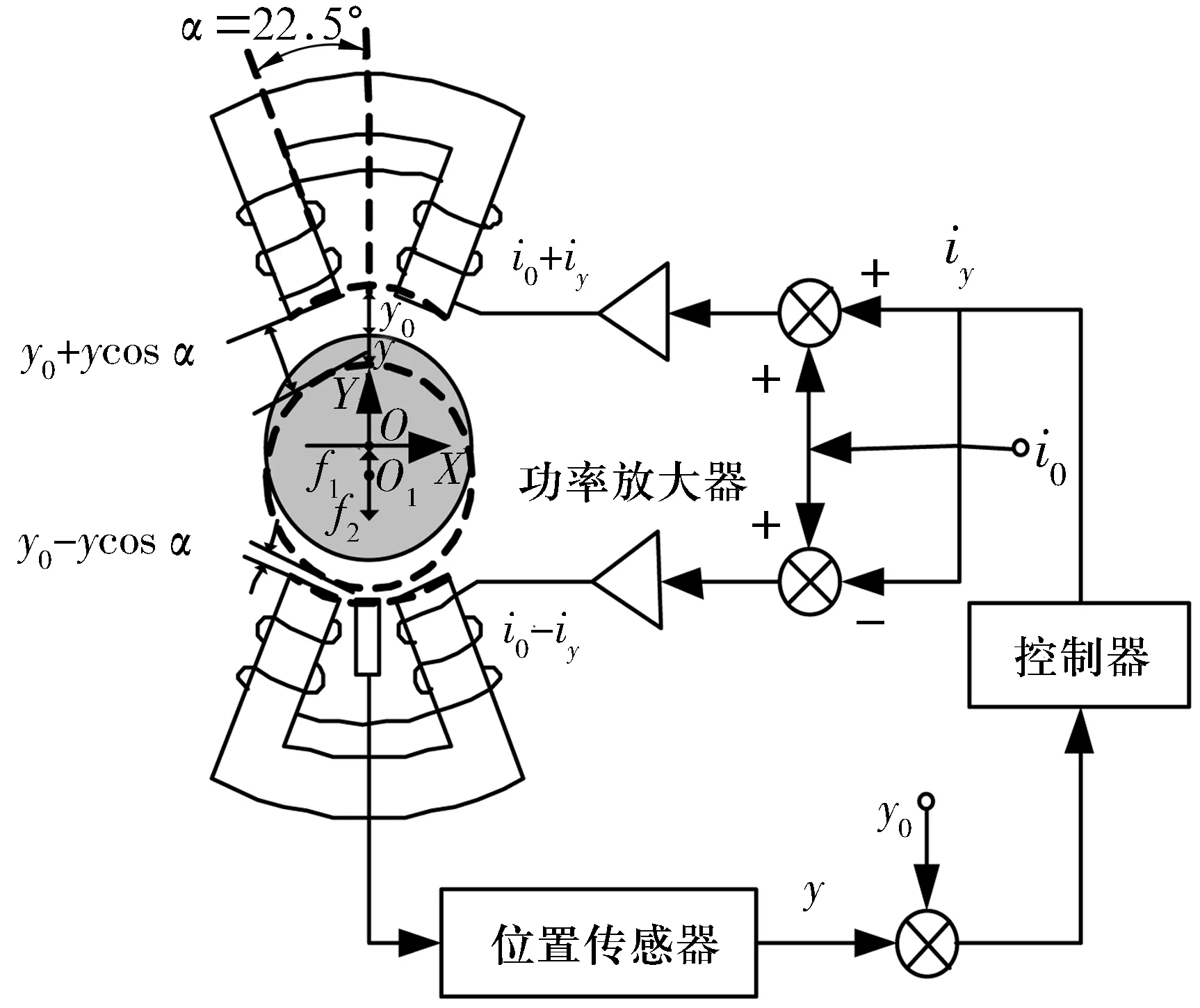
图1 磁悬浮轴承的工作原理图Fig.1 Schematic diagram of the AMB
当外界干扰使转子产生向下的偏移量y时,转子与上、下电磁铁之间的气隙分别为(y0+y),(y0-y) 。为了抵消外部干扰,控制器输出的矫正信号经过功率放大器,产生的流过上、下电磁铁线圈的电流分别为(i0+iy)和(i0-iy),其电磁力分别为
(1)
式中:μ0为真空磁导率;A为磁极横截面积;N为电磁轴承线圈匝数;i0为当转子位于稳态位置时的偏磁电流;y0为当转子位于稳态位置时的气隙;α为磁极夹角。
垂直方向上的电磁合力为
(2)
将(2)式在稳态位置进行Taylor展开,忽略非线性项得

kii+kyy,
(3)
式中:ki为电流刚度系数,反映电磁轴承控制电流变化与电磁力之间的关系;ky为位移刚度系数,反映电磁轴承转子位移变化与电磁力之间的关系[7]。
2 模糊PID参数自整定方法
模糊控制是智能控制的一个重要分支,是人工智能、自动控制、运筹学等多学科交叉,通过专家的知识和操作人员的丰富实践经验得到满意的控制效果[8]。磁轴承PID参数模糊自整定实质就是找出PID控制的3个参数Kp,Ki,Kd与转速v和气隙e之间的模糊关系,在电磁轴承工作时不断检测v和e,对控制参数在线修正,以满足在静止和气隙时电磁轴承对控制参数的要求,从而使电磁轴承具有良好的动静特性。
2.1 预整定参数
预整定参数是在转子振动设计要求下,根据轴承转子悬浮动态特性趋势,得到PID控制参数Kp,Ki,Kd,作为参数自整定模糊PID控制器对参数在线调整的初始值Kp0,Ki0,Kd0[9]。采用扩充临界比例放大系数法进行参数预整定,以临界放大倍数KU和临界周期变量TU为变量,得到一组预整定参数见表1。
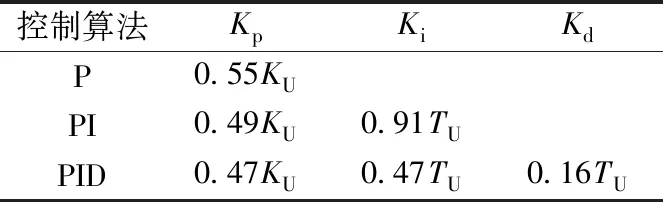
表1 PID参数预整定Tab.1 Parameter adjusmlent in advance
2.2 模糊规则的确定
从系统的稳定性、响应速度、超调量和稳态精度等方面考虑,结合电磁轴承的工作特点,将其转速分为:低转速模式BV(0~1 500 r/min)、中转速模式MV(1 500~6 500 r/min)和高转速模式SV(6 500~9 000 r/min)。在每种转速工况下,又根据转子与电磁铁之间的气隙划分为:大气隙模式BE(0.30~0.40 mm)、中气隙模式ME(0.10~0.30 mm)和小气隙模式SE(0.00~0.10 mm),模乎规则见表2,其中(m=p, i, d)。
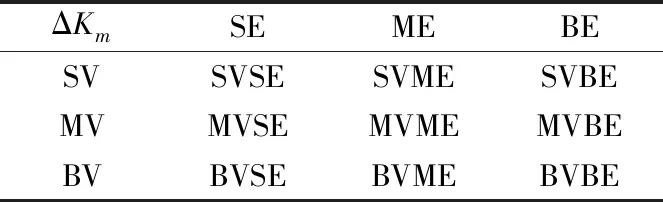
表2 ΔKm模糊规则表Tab.2 ΔKm fuzzy rule table
对不同控制对象模糊规则的确定,需要不同的控制方法。如果系统响应速度慢,就增大Kp值;如果超调量过大,就减小Kp值,以中转速模式MV下的3种气隙工况进行说明。
在MVBE模式下,为实现控制器输出快速跟踪的偏差信号,迅速调整偏差。当检测偏差绝对值|em(k)|>0.40 mm时,说明转子位置信号发生跳变,需要迅速施加很大的电磁力,即增大比例的权重
ΔKmp=Kmp(Kmp>0),ΔKmi=Kmi,ΔKmd=0。
(4)
为了防止发生积分饱和现象,只有在|e(k)|<0.05 mm,即MVSE模式,说明偏差绝对值足够小,此时引入积分,减少静态偏差,提高系统的准确度
ΔKmi=Kmi;Kmi≠0。
(5)
在MVME模式下,当em(k)Δem(k)>0时,说明转子在向远离基准位置方向运动。控制器实施较强的控制作用,以达到扭转误差绝对值向减小方向变化,迅速减小误差绝对值的目的;当em(k)·Δem(k)≤0时,说明转子在向基准位置方向运动,或者已经达到平衡状态,此时控制器实施较弱的控制作用。
在第k个采样时刻的整定参数为
(6)
式中:Kp(k),Ki(k),Kd(k)为第k个采样时刻控制器参数。
3 试验验证
以600 Wh飞轮储能系统径向磁悬浮轴承为试验对象进行试验验证,飞轮储能系统如图2[9]所示,由飞轮转子系统、电磁轴承系统、能量转换系统、监控系统、冷却系统、真空系统等部分组成。试验平台如图3所示。在4.5×10-2Pa真空环境下进行试验,信号屏蔽方式采用铠装电缆,基础安装方式为地脚螺栓。
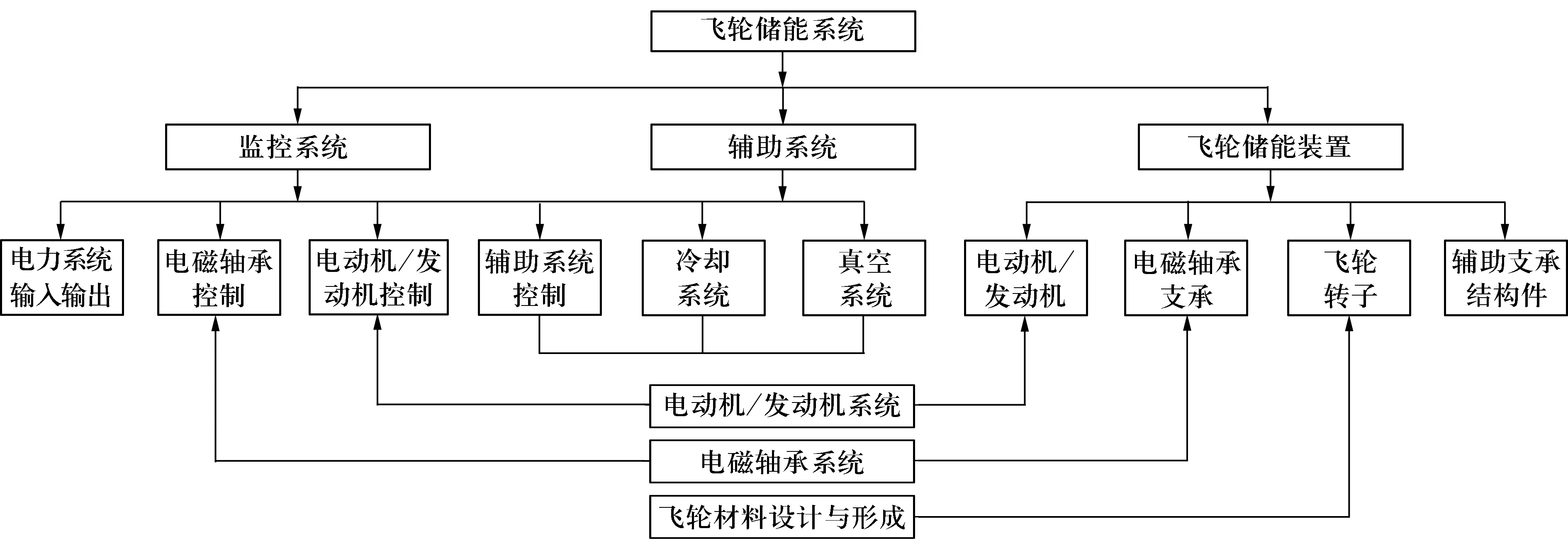
图2 飞轮储能系统Fig.2 The flywheel energy system

图3 600 Wh飞轮储能试验台Fig.3 The 600 Wh flywheel energy test-bed
以高速工况为例,验证参数整定方法的可行性。转子在7 200 r/min下运行时,转子振动响应和轴心轨迹分别如图4、图5所示。由图可知,转子的涡动情况比较稳定,振动幅值变化缓慢,证明模糊PID参数自整定方法较普通PID控制系统稳定性明显提高。

图4 转子振动响应图Fig.4 Vibration response of rotor

图5 7 200 r/min下转子轴心轨迹Fig.5 Axis locus with 7 200 r/min
4 结束语
提出了一种适用于飞轮储能系统的径向电磁轴承模糊PID参数自整定方法,经试验验证了通过轴承气隙偏差和转子转速来实时进行参数控制是可行的。在大偏差工况下,迅速施加较大的电磁力;在小偏差下,实施较弱的控制作用。与普通PID控制器相比,电磁轴承转子最大振动幅值有所减小。
猜你喜欢
上海大中型电机(2021年1期)2021-06-09 09:12:04
防爆电机(2020年4期)2020-12-14 03:11:08
防爆电机(2020年3期)2020-11-06 09:07:30
模具制造(2019年7期)2019-09-25 07:30:00
中国生物医学工程学报(2019年4期)2019-07-16 08:04:16
中学生数理化(高中版.高二数学)(2017年1期)2017-04-16 05:33:46
中国自行车(2017年11期)2017-04-04 02:51:30
校园英语·中旬(2015年7期)2015-08-10 01:35:27
城市轨道交通研究(2015年5期)2015-02-27 11:02:05
意林(2014年1期)2014-07-05 05:54:04
