
多电机同步控制系统设计与实现
2017-07-12 15:49唐红雨陈飞王翠军
电气传动 2017年6期
唐红雨,陈飞,王翠军
(1.镇江高等专科学校电气与信息工程学院,江苏 镇江 212003;2.江苏华通动力重工有限公司,江苏 镇江 212003)
多电机同步控制系统设计与实现
唐红雨1,陈飞2,王翠军2
(1.镇江高等专科学校电气与信息工程学院,江苏 镇江 212003;2.江苏华通动力重工有限公司,江苏 镇江 212003)
大型沥青拌和站中交流电机的数量达几十台,为提高各原料的配比精确性、振动和搅拌的均匀性,在控制中需要考虑到多个电机协调同步问题,且大功率电机长时间负载运行,易出现饱和。针对这一现象,设计抗饱和控制策略来提高系统的控制性能,并通过仿真验证了策略的正确性。采用PLC+Delphi设计了拌和站的监控系统,模拟了拌和站生产的控制流程,该系统可实时监测到多个电机的电流,设计了模块之间的组合通讯协议,试验结果表明,此方法能够提高产品质量指标。
多电机;同步控制;比例积分微分;沥青拌和站;监控;电流
随着科技的进步,生产线自动化程度越来越高,电机作为生产线主要的驱动设备,数量也越来越多[1]。电机之间不仅存在着连锁关系,还存在同步、同比例控制的问题,其电机的协调控制也关系着产品的质量、精度和稳定性。多电机同步控制是大型生产线的关键技术,但多电机的同步控制性能和精度,在运行过程中往往会因受到负载扰动、环境、驱动不匹配、不协调等因素的影响而降低。
目前,多电机同步控制策略主要有同一给定控制、主从控制、虚拟总轴控制、交叉耦合控制和偏差耦合控制等[2]。文献[3]详细综述了近年来国内外提出的典型控制策略,并对其控制方法展开分析,对控制对象的解耦性能、鲁棒性及跟踪精度等控制性能进行比较研究;提出最小相关轴数目的多电机同步控制策略,设计基于相邻耦合误差和滑模控制理论的同步控制算法[4],用来消除抖振[5];采用神经网络PID算法,把控制器与偏差耦合控制结构相结合,设计了基于神经网络PID的多电机同步控制策略[6-7];在相邻交叉耦合控制策略的基础上,又提出了加权交叉耦合的多电机同步控制策略与算法[8]。并联交叉耦合控制结构一定范围可以实现稳定控制,可是当同步电机的数目大于2时,因补偿规律很难确定而不适用,这些被控对象大多数是基于实验室的,多电机控制的远程监控系统还不多见[9]。
本文研究的是大型沥青拌和站的多电机系统,设计多电机同步控制策略和监控系统实时检测多电机的状态,对提高产品质量有着非常实用的研究价值。
1 拌和站工艺流程
沥青混合料搅拌设备的主要功能是将放在冷集料仓中的砂料、骨料经过输入皮带送入干燥滚筒加热干燥,然后由热料提升机送入振动筛进行大小骨料筛分,分成6种不同粒径大小和规格的骨料,送到6个热料仓,根据沥青混合物工艺要求以及用料的不同级配需要,由称重模块分别计量,然后放入拌缸;粉料分矿粉和除尘后的废粉,计量斗计量后放入拌缸;沥青经过脱水加热融化后向拌缸内喷洒,搅拌45 s后,生成沥青混合料,送入成品仓保存备用。
在沥青拌和站中共有大小50台电机,功率最大有250 kW,最小的有0.37 kW。其中,存在同步控制要求的有冷集料斗、骨料的6台2.2 kW给料电机,用来控制不同规格的冷料、骨料的输送;振动筛的2台30 kW电机,用来控制左右振动筛的动作,区分料粒;拌缸为采用双轴形式,由2台45 kW电机拖动,需要均匀动作。工作时,必须考虑电机同步问题,否则会出现骨料的配比不准确、振动筛左右不平衡、搅拌不均匀,造成产品质量下降。
所以为提高控制精度和设备的自动化程度,需开发远程监控系统。
2 多电机同步控制策略
多电机同步运行系统中的控制结构主要包括耦合和非耦合2种同步控制结构。这里采用耦合控制,其主要有交叉耦合、偏差耦合、相邻交叉耦合,其中交叉耦合主要适用于2台电机的系统,偏差耦合适用于电机数大于2的系统,相邻交叉耦合则可以减少控制系统的结构,控制更简单。同步控制中,每台电机的控制器包含了跟踪误差和同步误差控制器,把n台电机分为n个同步子系统,相邻3台电机构成1个子系统,首尾相邻构成1个环形。相邻交叉耦合结构在控制时,只需考虑自身的跟踪误差及相邻i-1,i+1台电机的同步误差。第i台电机的跟踪误差ei(t)定义为

第i台电机与第i-1台电机的同步误差εi1(t)和第i+1台电机的同步误差εi2(t)分别定义为

要使各电机同步运行,应使每台电机的跟踪误差ei(t)和它与相邻两电机的同步误差εi1(t),εi2(t)稳定收敛,即要满足下式:
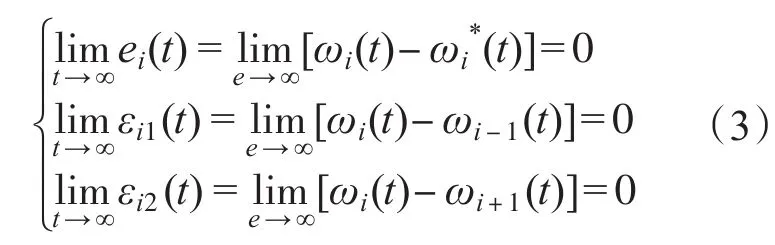
但在沥青搅拌站的多电机控制系统中,往往电机之间的速度存在一定比例关系,所以需要对上述相邻交叉耦合控制进行修正,假设n台电机之间的转速关系存在 ω1:ω2:…:ωn=α1:α2:…:αn。则第i台电机与i-1,i+1台电机的比例同步误差分别为则有

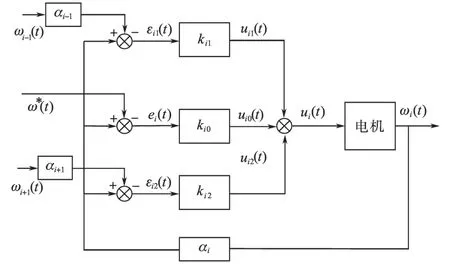
图1 控制器结构图Fig.1 Controller structure diagram
2.2 Anti-windup设计
1.3.3 治疗摆位 在EDGE直线加速器上,重复与定位时一致的体位固定方式,固定患者体位,移动治疗床到靶区定位中心,以激光灯和面罩标准线预摆位,调用重建的面部体表DICOM影像,启动OSMS软件,扫描面部,再行体表光学系统精确摆位,得到面部体表光学(与DICOM影像比对)监测偏差值,3次监测数值的均值记录为当次影像偏差值。
沥青拌和站多电机系统中的速度控制器通常含有较大的积分环节和一些限幅环节,系统易饱和,当电机速度大范围快速变化时,控制系统必然会产生Windup现象,使得线性控制器的输出与被控对象的输入不相等,造成闭环响应变差,震荡加剧,稳定性变差。引入适当的补偿环节,使控制系统在出现饱和现象时仍能达到比较满意的性能指标,Anti-windup设计技术已经成为具有饱和特性控制系统的基本方法。抗饱和的变结构PID控制算法,其结构如图2所示。对控制输入饱和误差un-us进行积分并通过自适应系数调整将其加到PID控制的积分项中。
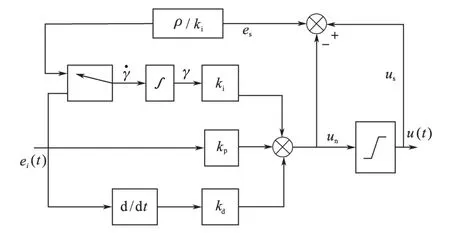
图2 基于Anti-windup的PID控制器结构图Fig.2 Controller structure diagram based on Anti-windup PID
变结构PID算法采用系数γ实现积分项自适应调整,自适应变化律为
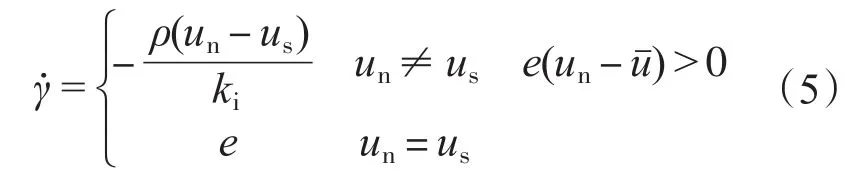
基于Anti-windup的PID控制算法为

为验证控制策略的正确性,对系统进行仿真,设指令为阶跃信号,输入控制在[0,10]范围内,分别采用传统PID和Anti-windup的PID控制算法仿真,仿真时,取ρ=2,kp=30,ki=10,kd=2,三相交流异步电机的数学模型可近似为

图3是基于Anti-windup和基于传统PID控制的阶跃响应对比和控制器输出结果对比,2种控制方法的响应速度都比较快,系统也能稳定,但本方法阶跃响应误差要明显减小,说明此控制方法具有更好的动态响应特性,且基于Anti-windup的PID控制器输出收敛于控制输入饱和后的曲线,而传统PID控制逼近性能较弱,说明此控制器设计的输出特性得到了改善。

图3 2种控制方法比较Fig.3 Comparison of two control methods
3 监控系统设计
图4为监控界面。根据沥青混合料的生产工艺流程,采用PLC+Delphi开发了沥青拌和站多电机监控系统[10-11]。监控界面能够实时地反映出拌和站生产工艺流程及工作时设备的状态参数。界面分为系统监视、电机控制和模拟运行3个,模拟运行界面用来实时反映拌和站运行状态。中间部分是一个模拟的生产工艺流程画面,可以监控各个环节的状态信息;左边下方显示的6个冷集料斗的电机运行和频率,可以设定频率参数实现同步控制;右上方显示的是振动筛和骨料斗,6个骨料斗的剩余料比例,需要根据不同生产比例,通过变频调速来设定6个电机的不同转速;右下方是双轴搅拌缸,2个5 kW电机采用同步控制策略。界面下方是石料、沥青、布袋进出气、热仓、成品仓和成品实时温度显示窗口。右边一列用来显示电机电流实时值,如振动筛和搅拌缸的电流等。

图4 监控界面Fig.4 Monitoring interface
4 多电机监控设计
4.1 远程输入与输出
远程输入主要用于监控控制电动机运行状态“*”表示元器中处于分断状态,“·”表示处于合闸状态。远程输出用于监控动力控制柜内输出状况,方便用户排查通讯状况是否正常,如图5所示。鼠标点击对应的电动机上面按钮图案,即可运转或停止电动机。

图5 系统远程输入输出Fig.5 Remote input-output system
在按钮控制窗口的上方有主楼调试、矿粉调试、旧粉调试、卸粉手动共4个功能按钮。主楼调试用于控制电动机启停的先后顺序,是由低级电动机到高级电动机,即按照冷给料电机、平皮带电机、斜皮带电机、干燥筒电机、热提升电机、振动筛电机的顺序。矿粉调试用于控制矿粉系统电动机的启停,其功能类似于主楼调试功能按钮。
4.2 电机参数
电机参数界面包含星三角切换时间、温度参数、废料处理启动延时、废料处理停止时间、振动筛反接制动时间和粉斗参数6个对话框,如图6所示。如星三角切换时间包括有引风机、搅拌缸、热提升和烘干筒4个参数设定。

图6 电机参数设置界面Fig.6 Motor parameter setting interface
5 通讯与巡检
系统采用三菱Q00U型CPU,输入输出模块分别是QX42,QX42P,系统采用双机冗余设计,可以提高控制系统的可靠性,2台工控机分别通过RS485和USB接口与主控PLC连接通讯。拌和站的通信模块根据对象不同,分为RS-485,Ethernet和CC-link 3种组合实行通信,采用的控制模块分别为QJ71C24N-R4,QJ71E71-100,QJ61BT11N。其中QJ71C24N-R4为RS-485通信模块,RDA与485+连接,RDB与485-连接,RDA,RDB分别与SDA,SDB短接,实现CPU与电流模块、变频器通讯;以太网QJ71E71-100模块1和3对接,2和6对接,其他对应相接,实现PC机与PLC通讯;QJ61BT11N中的DA,DB是功能相同的数据线,将主站和从站的DA,DB以及地线DG对应相连,屏蔽SLD端子应与屏电缆的屏蔽层连接,实现CPU与远程I/O、温度模块、称重模块通讯,本系统CPU为每个CC-Link模块分配32个地址单元,输入、输出地址分别为XA0-XBF,YA0-YBF[12]。本系统采用WBHS-09型多路电流监测器,1#,2#电流监测仪用于接入本文需要采用同步控制策略的电机,如图7所示。
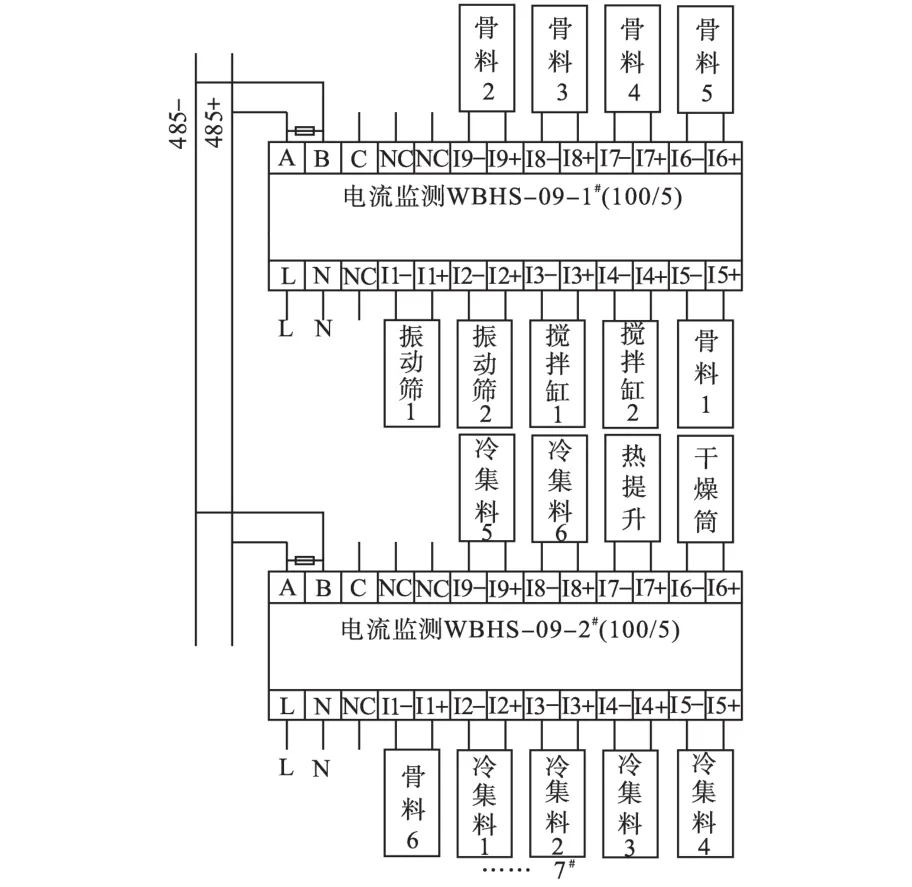
图7 1#,2#电流监测仪接线Fig.7 Current monitor wiring of 1#and 2#
6 试验验证

图8 混合料质量指标试验数据分析图Fig.8 Mixture quality index test data analysis chart
混合料质量指标试验数据分析图,如图8所示。为验证方案的可行性,在企业的试验场地内,对采用同步控制策略和普通控制的沥青产品进行实验,采用常用的马歇尔试验法,对混合料的空隙率、弯拉应变强度2个性能指标随机采样8个点,进行数据分析。从图8这组数据可以看出,采用同步控制策略的沥青拌和站生产出的混合物质量指标曲线数据大部分都在普通控制方法之上,说明可以提高产品的质量,节约原料成本。
7 结论
该多电机同步控制策略是为某路面机械公司的4000型沥青拌合站开发的,为提高沥青混合料的性能指标,采用的Anti-windup控制方法有效降低系统的饱和,提高了系统的控制性能。设计了多电机监控系统,监控界面能够模拟各个电机及设备的运行状态、生产过程,可以实时监测各电机电流并自动故障预警及报警功能,具有较好的发展前景。
[1]朱伟兴,张建.采用DSP的多电机同步控制系统[J].电机与控制应用,2012,39(2):31-35.
[2]刘然,孙建忠,罗亚琴,等.多电机滑模环形耦合同步控制策略研究[J].中国机械工程,2010,11(22):2662-2665.
[3]李慧,刘星桥,李景,等.多电机同步协调系统控制策略[J].电机与控制应用,2014,41(4):6-11.
[4]张承慧,石庆升,程金.一种基于相邻耦合误差的多电机同步控制策略[J].中国电机工程学报,2007,27(15):59-63.
[5]曹玲芝,李春文,牛超,等.基于相邻交叉耦合的多感应电机滑模同步控制[J].电机与控制学报,2008,12(5):586-592.
[6]曹春平,王波,胥小勇,等.基于神经网络多电机偏差耦合同步控制研究[J].控制工程,2013,20(3):415-418.
[7]胥小勇,孙宇,蒋清海.改进型相邻耦合结构的多电机比例同步控制[J].仪器仪表学报,2012,33(6):1254-1259.
[8]谷雨,马钺.基于加权交叉耦合的多电机同步控制研究[J].电气传动,2015,45(9):58-62.
[9]王红,王志刚,刘颖,等.基于XC164CS的电机监控系统的研究[J].电测与仪表,2009,46(S1):107-109.
[10]唐红雨,王翠军,刘政.沥青拌和站监控系统设计[J].测控技术,2015,34(3):67-70.
[11]谭生光,金斌.沥青混凝土拌和站远程监控系统的设计与应用[J].现代交通技术,2013,10(2):22-24.
[12]唐红雨,黄海峰,王翠军.CC-Link总线的沥青搅拌站控制系统设计[J].计算机测量与控制,2014,22(6):1773-1776.
Design and Implementation of the Multi-motor Synchronous Control System
TANG Hongyu1,CHEN Fei2,WANG Cuijun2
(1.School of Electrical and Information Engineering,Zhenjiang College,Zhenjiang 212003,Jiangsu,China;2.Jiangsu Jhkinetics Co.,Ltd.,Zhenjiang 212003,Jiangsu,China)
The number of AC motors in the large asphalt mixing station is up to a few dozen.In order to improve the accuracy of the proportion of raw materials,the uniformity of vibration and stir,the coordination-synchronous problem is to be considered in the multi-motors control.And large power motors are easy to appear saturated during the long time load operation.Aiming at this phenomenon,the ant-windup control strategy was designed to improve the control performance of the system,and the correctness of the strategy was verified by simulation.The monitoring system of the mixing station was designed with PLC+Delphi,and the control flow of the mixing station was simulated.The system could be used to monitor the current of multi-motors in real time,and the communication protocols between the modules were designed.The test results show that the method can improve product quality index.
multi-motors;synchronouscontrol;proportionintegraldifferential;asphaltmixingstation;monitoring;current
TP273
A
10.19457/j.1001-2095.20170610
2015-12-07
修改稿日期:2016-10-26
路机产品控制系统多功能试验平台校企合作项目(2027070005);
多电机同步协调控制研究校级课题(GZ2015120712)
唐红雨(1975-),男,硕士,副教授,Email:t_redrain@126.com
猜你喜欢
机械管理开发(2021年11期)2022-01-25
建材发展导向(2019年5期)2019-09-09
现代机械(2018年1期)2018-04-17
制造技术与机床(2017年2期)2017-05-04
学习月刊(2015年18期)2015-07-09
舰船科学技术(2015年8期)2015-02-27
航天返回与遥感(2014年5期)2014-07-31
筑路机械与施工机械化(2014年8期)2014-03-01
筑路机械与施工机械化(2014年4期)2014-03-01
河南科技(2014年4期)2014-02-27
