
基于DSP异步电动机矢量控制系统仿真与实验研究
2017-07-12 15:51:02江宏玲周成戴新荣谢芳
电气传动 2017年6期
江宏玲,周成,戴新荣,谢芳
(1.安徽淮委水利科学研究院,安徽 合肥 230088;
2.安徽国际商务职业学院,信息服务系,安徽 合肥 231131;
3.安徽大学工业节电与电能质量控制协同创新中心,安徽 合肥 230601)
基于DSP异步电动机矢量控制系统仿真与实验研究
江宏玲1,周成2,戴新荣1,谢芳3
(1.安徽淮委水利科学研究院,安徽 合肥 230088;
2.安徽国际商务职业学院,信息服务系,安徽 合肥 231131;
3.安徽大学工业节电与电能质量控制协同创新中心,安徽 合肥 230601)
对磁场定向控制的理论进行了分析,选择基于转差率的间接矢量控制方案,仿真和探讨了影响解耦控制的因素。使用Matlab/Simulink对解耦效果进行了仿真解析,仿真结果验证了该方案具有较好的控制性能。在理论分析和仿真验证的基础上,搭建了基于TM320F28335型DSP的硬件系统实验平台,并在11 kW电机拖动实验平台上进行了相应实验。实验结果表明该方案实现了转矩和磁通解耦控制,控制系统简单易行、动态响应快且超调量小、稳态精度高。
异步电机;转子磁场定向;转差率
异步电动机虽然具有结构简单、大容量、高转速与维护方便等众多优点,但其多变量之间的强耦合性与非线性导致系统在高性能上的控制困难。
目前矢量控制技术被广泛应用于工业中,其核心思想是利用坐标变换来计算转差或转子磁链角从而实现解耦,包括定转子磁链与气隙磁链定向方式以及转差矢量控制方式等[1-3]。
磁场定向控制是将定子电流分解成与转子磁场同向、正交的励磁与转矩2个分量进行分别独立完全解耦控制,包括直接磁场与间接磁场定向控制2种方法。
直接磁场定向有基于电压和电流模型2种方法,都需要获得反馈磁链矢量信号,但在低频时由于电压信号小、直流偏移量引起的积分误差累积以及电机参数的变化使转子磁链的估计精度降低等因素,使基于电压模型的控制很难取得良好的控制性能。而后者虽然低速时估算磁链精度较高,但其高速性能较差。
间接磁场定向控制又称转差频率矢量控制或磁场前馈控制,可使转矩、励磁控制完全解耦且容易实现,有效消除转矩电流在动态过程中的波动,从而改善了系统动、静态性能,其控制方法简单易行、控制精度高及高可靠性使其在工业上得到广泛应用[4],因此本文采用了间接磁场定向控制方式。
1 异步电机数学模型
异步电机是一种多输入输出非线性强耦合系统,是通过控制转矩来控制电机的,其转矩稳态方程为

式中:K为与电机构造有关的常数;Φm为气隙磁通有效值;I2cosφ2为转子电流的有功分量。
由式(1)可知,异步电机的稳态电磁转矩与定子电流并无直接关系,并且其三相定子电流要产生旋转磁场和电磁转矩,2个分量很难分开,而且与电机本身及其负载关联导致其动态过程十分复杂。因此,为了改变转矩方程的非线性,即像控制他励直流电机一样获得较好的动稳态性能,如何实现2个分量的解耦,即各轴分量独立控制成为关键问题。
图1为异步电机相量图。
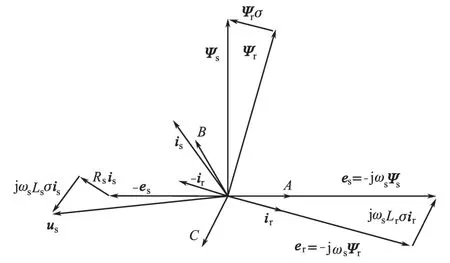
图1 三相异步电机相量图Fig.1 Phasor diagram of three phase asynchronous motor
为了实现磁场定向控制,我们先将A/B/C轴系下的电机方程转化为任意M/T旋转轴系下有:
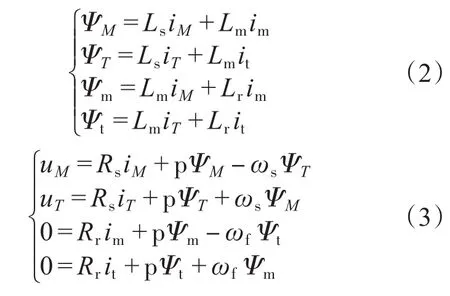
式中:u,i分别为电压和电流;L,R,ω,Ψ分别为电感、电阻、角速度和磁链;下标s,r,m,t分别为定子、转子、互感磁场量以及转矩量;下标M,T分别为M/T轴系下M轴与T轴上的分量;p为微分算子,p=d/dt;ωf为转差角速度,为转子时间常数;ωs为转子磁链矢量的电角速度。在动态情况下,ωs和ωf均为变量,在稳态运行时ωs和ωf为常值。
式(2)、式(3)为异步电机在任意M/T轴系内的定转子磁链方程与定转子电压方程。取M轴与转子磁链Ψr一致,使Ψt=0(T轴分量为0),即所谓的基于转子磁场定向控制,将方程整理为

式中:p0为电机极对数;σ为定子瞬间电感因数;δr为转子漏磁因数,。
由式(4)可知,转矩Te与T轴上的定子电流分量iT成正比,磁链Ψr仅与M 轴上的定子电流分量iM成正比。
2 间接磁场定向控制系统
2.1 间接磁场定向控制原理
异步电机由于其复杂的磁链关系使其数学模型相当复杂,要利用Clark(3S/2S)与Park(2S/2R)变换来简化并实现A/B/C三相静止坐标系到两相同步M/T旋转坐标系的等效。
矢量控制的核心思想正是利用功率和磁动势不变的原则,通过坐标变换,将非线性强耦合的异步电机时变系统进行解耦控制,通过对M/T坐标系下由Park变换将定子电流按转子磁场定向得到IsM,IsT2个互相垂直,彼此独立的直流分量进行分别控制来实现对磁通(IsM)及转矩(IsT)的控制[5-6]。因此,磁场定向是矢量控制中必不可少的,而磁场定向可分为直接磁场定向和间接磁场定向2种方式。直接磁场定向需要检测和估算磁场来得到定转子磁链矢量的空间位置,但直接检测磁场实现困难,一般采用磁链观测法来估算转子磁链位置。间接磁场定向是在转子磁链大小不变的情况下将测到的定子电流、旋转磁场角速度利用M/T轴系上的数学模型运算来实现间接磁场定向,无需得到转子磁链矢量的实际位置,实际上是利用控制转差频率来完成的[7-9]。因为指令值确定转子磁链(上标“*”为对应变量给定值),而在磁场定向条件下由,可用来作控制Ψr的指令值,由方程:


另外



式中:ωr为实际转速。

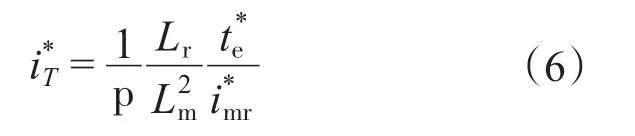
参考轴系间的关系如图2所示。
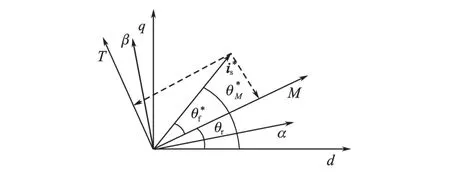
图2 3个参考轴系间的关系Fig.2 The relationship between the three reference axis
在图2中,转子位置θr可通过检测转子速度ωr获得,而角度的确定可通过对的积分获得,M/T轴系下的相位可由θr,确定。图3所示为间接磁场定向控制系统框图。

图3 间接磁场定向系统框图Fig.3 The block diagram of the indirect field oriented system
通过DSP的全数字处理来实现SVPWM策略、电流解耦、速度调节器以及转子磁场定向。
2.2 影响间接磁场定向的几个因素
2.2.1 转子时间常数对磁场定向和稳态性能的影响
间接磁场定向系统如果无法获得精准的转子时间常数,则会使定向发生偏差,致使励磁与转矩电流互相耦合,影响系统性能。通常转子时间常数发生变化的主因是由于转子电阻易受温度以及集肤效应的影响,而此参数的变化对转差频率控制的间接磁场定向影响较大。假设M/T坐标轴系已沿转子磁场定向,实参Rr,Lr,Lm与给定值对应,可得矢量图如图4所示。
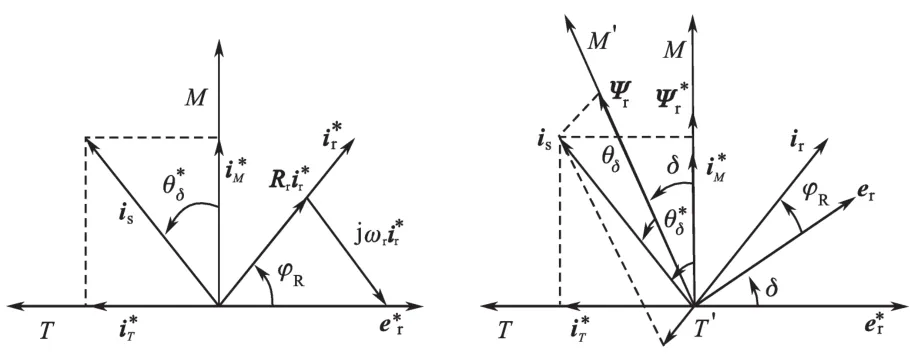
图4 磁场定向破坏前后定、转子电流矢量图Fig.4 Stator and rotor current vector before and after magnetic field oriented destruction
在M′-T′轴系上将定子电流分解,得到真正的iM和iT。实际的Ψr要大于,将使电动机过励,引起磁路饱和,功率因数下降,损耗增大和温升变高。
2.2.2 磁路饱和对磁场定向和系统性能的影响
在磁场定向后,稳态电磁转矩表示为
在磁路不饱和情况下,当iM和iT相等时,每安培定子电流is产生的转矩值最大;在磁路饱和的情况下,此时的转子磁通受饱和极限的制约,即使iT增大时,iM按比例增大也不可能有这种理想效果。在实际运行中,电机在恒转矩区运行时,设定Ψr为常值,Ψr值确定的依据是使主磁路达到适度程度的饱和,这样可以充分利用磁性材料,获得尽可能高的转矩/电流比。
3 仿真分析
利用Matalab对转子磁场定向的矢量控制系统进行仿真实验[10-12]。
使用Matalab自带电机模型,三相感应电动机的参数如下:功率 Pn=15 kW,线电压UAB=400 V,定子相绕组电阻Rs=0.214 7 Ω,转子相绕组电阻 Rr=0.220 5 Ω,定子绕组自感Ls=0.065 181 H ,转子绕组自感Lr=0.065 181 H,互感Lm=0.064 19 H,转动惯量J=0.102 kg·m2,额定转速 n=1 460 r/min,极对数p0=2。使系统在空载情况下启动然后当进入稳态后,在t=4 s时施加100 N·m的负载。仿真得到的转速、转矩响应如图5所示。
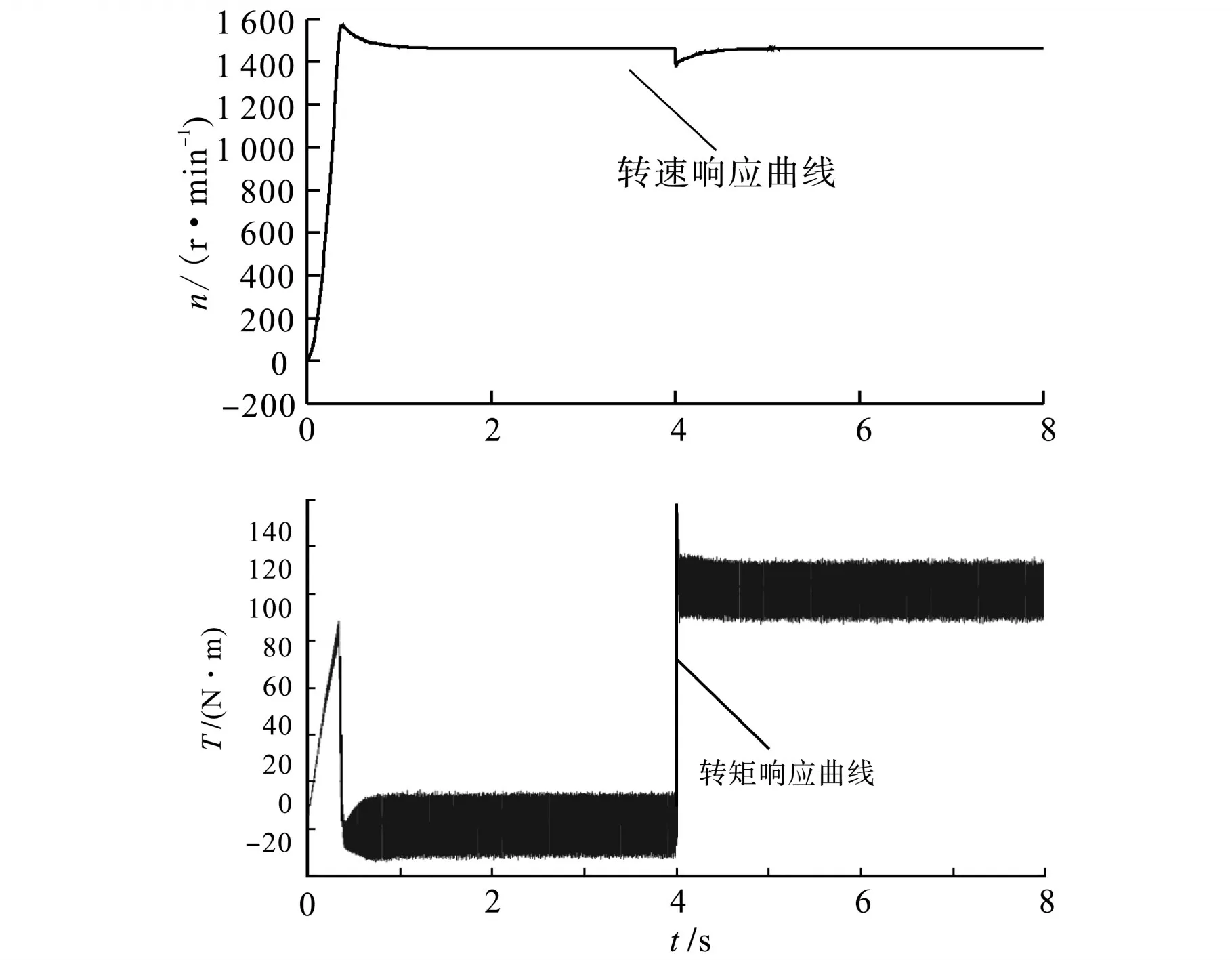
图5 转速与转矩响应曲线Fig.5 Speed and torque response curves
Tr变化对系统性能的影响(Tr<)如图6、图7所示。
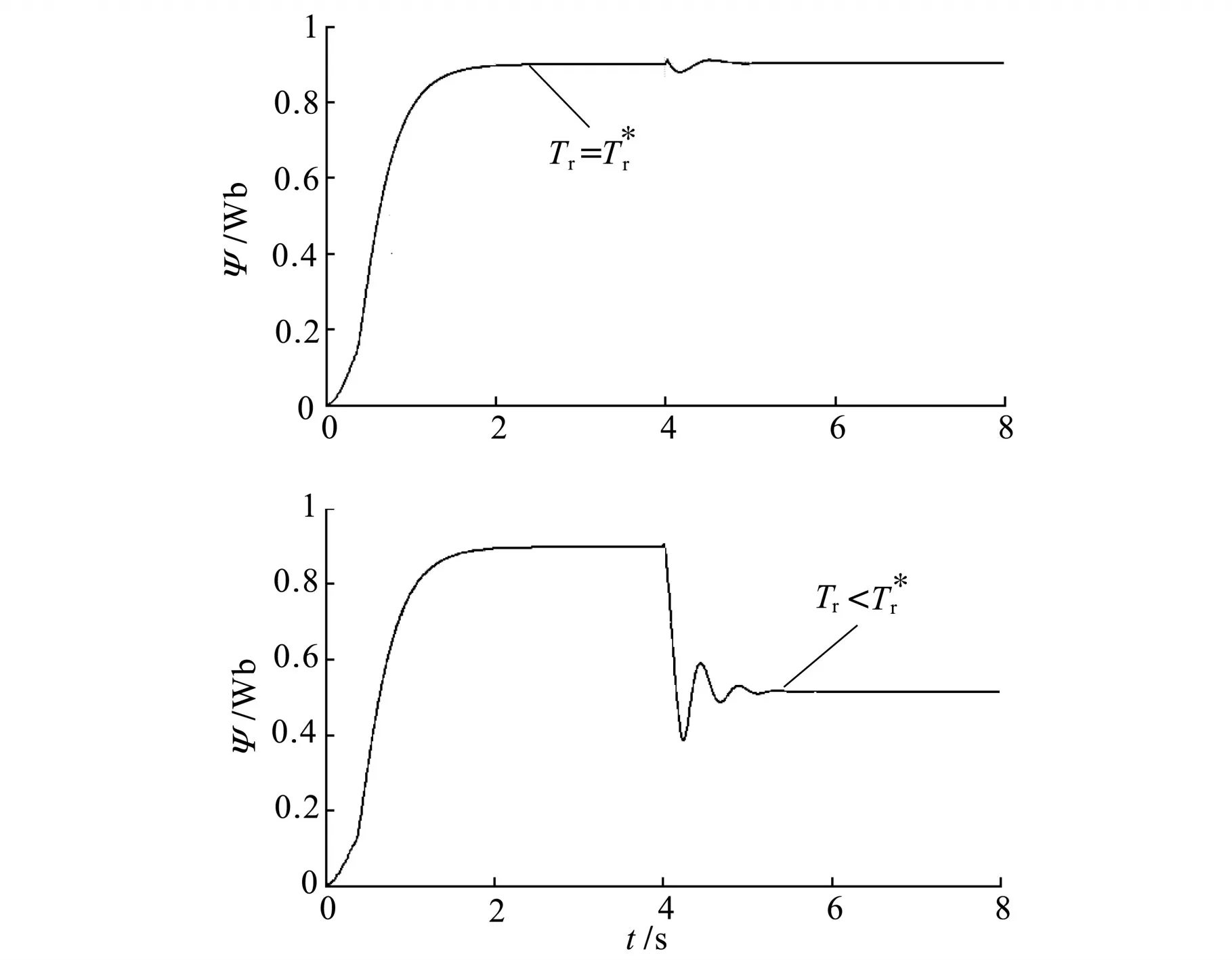
图6 Tr变化对转子磁链的影响Fig.6 Effect ofTrchange on rotor flux
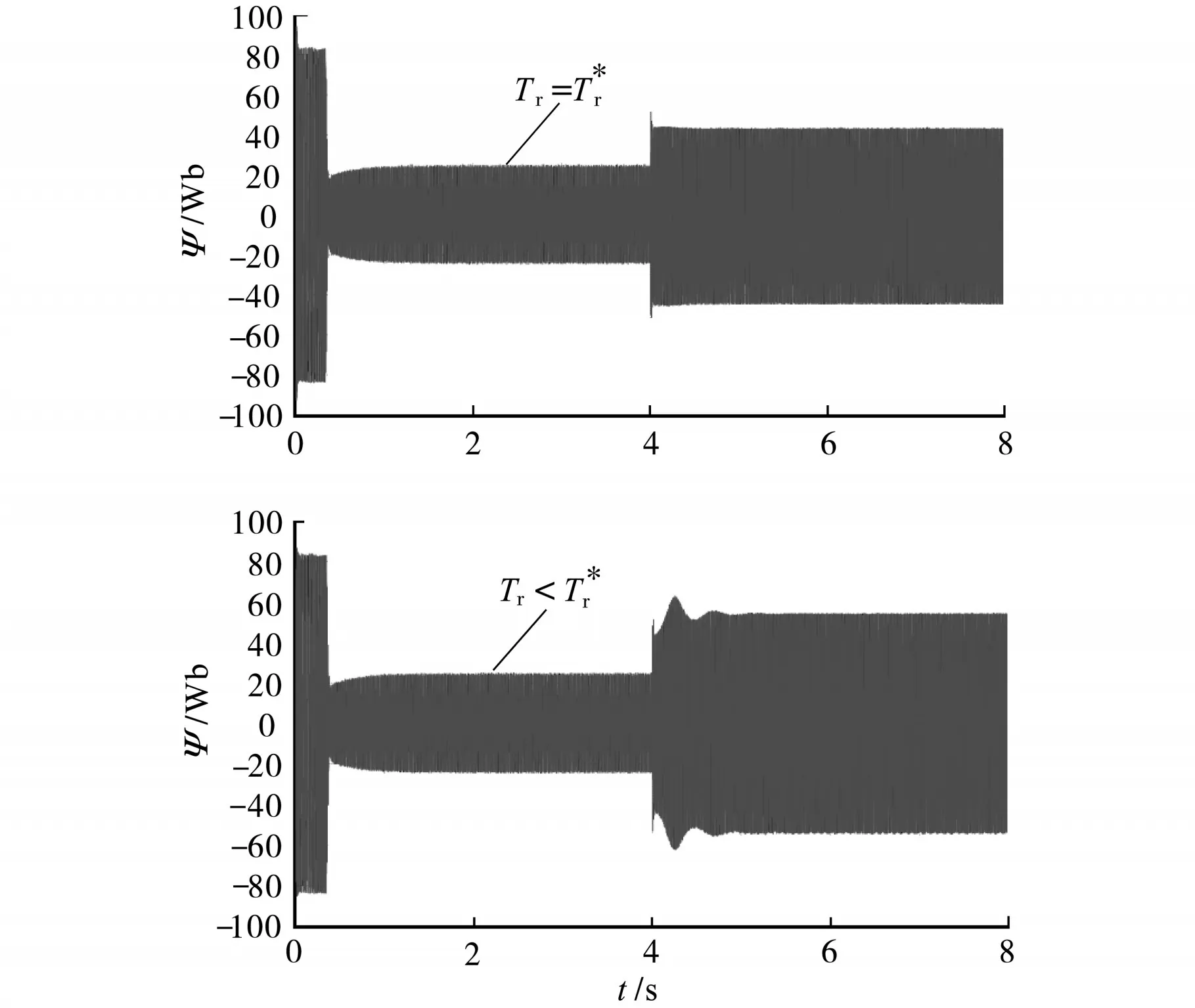
图7 Tr变化对定子电流的影响Fig.7 Effect ofTrchange on stator current
分析图6与图7的仿真结果可知,在转子磁场定向准确的条件下,系统具有较好的调速性能。当转子参数发生漂移时(若Tr<),由于转子磁场定向不准确,导致转速环调节输出的电流并非为纯转矩分量电流,其中一部分为励磁电流。这样转速环的输出值会不断增大,可能会达到系统的额定值,进而导致带载能力下降,转速无法稳定等问题。
4 实验结果与讨论
根据以上分析,为验证间接磁场定向控制算法的实际控制效果,实验室用英飞凌公司的IGBT(型号FF900R12IP4D)搭建逆变桥,主控芯片采用DSP28335,驱动信号经4245电平转换后再经IXDP630/631(死区时间控制器)产生dead-time后再反相后送给驱动电路。IXDP630/631还兼有保护功能,E_R,E_S,E_T分别封锁单相脉冲,OUT_E同时封锁三相脉冲。在11 kW拖动系统中进行实验,原动机为15 kW异步电机,2对级,额定转速1 460 r/min,额定转矩98 N·m,负载为11 kW双馈发电机,3对级,额定转速1 200 r/min。系统实验平台框图如图8所示。
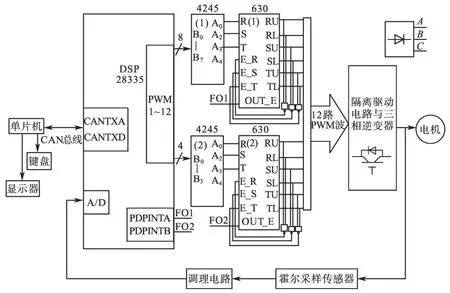
图8 系统实验平台框图Fig.8 Block diagram of system experiment platform
实验中,系统空载启动后原动机拖动到1 200 r/min后,在T=4 s时加载,双馈发电机并网,双馈电机给定功率11 kW,此时异步电机带载转矩约为90 N·m,基本接近额定转矩值。在T=4 s的加载瞬间转速有所下降,随后电机转速稳定在初始值1 200 r/min,在T=4 s的加载瞬间,定子电流由于转速环的调节作用相应增加,虚拟示波器实时波形如图9所示。

图9 电机转速及定子电流波形Fig.9 Motor speed and stator current waveform
当转子时间常数偏差较大时(若Tr<),从图10实验波形中可以看到,在负载逐渐加大后电机端电压会持续下降,这是因为励磁电流与转矩电流解耦不完全而无法维持恒定的转子磁场。随着速度环的调节作用,使得定子电流逐渐增大到额定值,此时由于转速下降过多双馈电机脱网,负载撤出后转速又开始逐渐稳定在空载转速。

图10 Tr变化时电机带载波形Fig.10 Motor waveforms with load when theTrchanges
5 结论
在研究基于间接磁场定向的异步电机调速系统中,通过理论分析和仿真验证了该控制算法的可行性。实验结果验证了基于间接磁场定向的异步电机调速系统实现了电机的解耦控制,系统具有稳态精度高和良好的转矩控制性能,调速性能媲美直流电机,该方法简单易行,对一般的调速场合均能适用。
[1]孙鹏飞,冯晓云.基于DSP异步电动机矢量控制系统的设计与实现[J].电力电子技术,2010,44(7):40-41.
[2]罗辉,胡泽,王文静.基于DSP的异步电机矢量控制系统设计与实现[J].电力电子技术,2008,42(9):24-26.
[3]周志刚.一种感应电机的解藕控制方法[J].中国电机工程学报,2003,23(2):121-125.
[4]杜永红,李哲峰,刘志刚.异步电动机间接磁场定向控制双闭环系统[J].电工技术学报,2009,24(5):24-28.
[5]苏奎峰,蔡昭权,吕强.TMS320x281xDSP应用系统设计[M].北京:北京航空航天大学出版社,2008.
[6]陈伯时.电力拖动自动控制系统[M](第3版).北京:机械工业出版社,2003.
[7]刘洋,赵金,王庆义.间接矢量控制系统中的异步电动机参数辨识[J].电工技术学报,2008,23(7):21-26.
[8]基于转子磁链q轴分量的异步电机间接矢量控制转差频率校正[J].中国电机工程学报,2009,29(9):62-66.
[9]王毅,马洪飞,赵凯岐,等.电动车用感应电机磁场定向矢量控制研究[J].中国电机工程学报,2005,25(11):113-117.
[10]骆皓,郑建勇,杨志.异步电机矢量控制实现恒转矩控制仿真[J].电机控制与应用,2008,35(5):26-29.
[11]洪乃刚.电力电子和电力拖动系统的MATLAB仿真[M].北京:机械工业出版社,2005.
[12]王正林.Matlab/Simulink与控制系统仿真[M].北京:电子工业出版社,2005.
System Simulation and Experimental Research Based on DSP of Asynchronous Motor Vector Control
JIANG Hongling1,ZHOU Cheng2,DAI Xinrong1,XIE Fang3
(1.Anhui&Huaihe River Institute of Hydraulic Research,Hefei 230088,Anhui,China;2.Information Service Department,Anhui Institute of International Business,Hefei 231131,Anhui,China;3.Collaborative Innovative Center of Industrial Energy-saving and Power Quality Control,Anhui University,Hefei 230601,Anhui,China)
The theory of field oriented control was analyzed,the indirect vector control scheme based on slip frequency was selected and the factors affecting the decoupling control were simulated and discussed.Decoupling effect was simulated using Matlab/Simulink,and the results show that the control performance is better.Based on the oretical analysis and simulation verification,a TM320F28335 hardware platform was built,the corresponding experiment was carried out on the 11 kW motor drive experiment platform.Experiments show that this method can realize the decoupling control of torque and flux,the system is simple and the response is fast and accurate.
asynchronous motors;rotor field orientation;slip
TM464
A
10.19457/j.1001-2095.20170603
2016-09-23
修改稿日期:2016-11-14
安徽大学博士启动经费(J01001961);安徽省教育厅自然科学基金重点项目(KJ2017A861);
国家青年自然科学基金项目(51607002)
江宏玲(1987-),女,工学硕士,工程师,Email:zxc_241@126.com
猜你喜欢
防爆电机(2020年5期)2020-12-14 07:03:58
防爆电机(2020年4期)2020-12-14 03:11:16
长春师范大学学报(2018年8期)2018-08-17 12:40:20
小学生导刊(2017年13期)2017-06-15 20:29:38
电测与仪表(2016年10期)2016-04-12 00:26:38
华东理工大学学报(自然科学版)(2015年2期)2015-11-07 09:16:20
华东理工大学学报(自然科学版)(2015年2期)2015-11-07 09:16:20
电测与仪表(2014年23期)2014-04-04 12:08:30
电测与仪表(2014年11期)2014-04-04 09:21:36
食品工业科技(2014年7期)2014-03-11 18:14:50
