
基于输入电压观测的间接矩阵变换器MPC方法
2017-07-12 15:49梅杨王闪闪
电气传动 2017年6期
梅杨,王闪闪
(北方工业大学变频技术北京市工程技术研究中心,北京 100144)
基于输入电压观测的间接矩阵变换器MPC方法
梅杨,王闪闪
(北方工业大学变频技术北京市工程技术研究中心,北京 100144)
针对间接矩阵变换器-异步电机(IMC-IM)调速系统,提出了一种基于输入电压观测的模型预测控制(MPC)方法。该方法对网侧电能质量和电机调速性能进行优化控制,并解决传统MPC方法检测量众多、采样调理成本高、时延长等问题。此方法基于IMC输入滤波器数学模型,设计了输入电压观测器,同时利用二阶差商法实现输入无功功率预测与输入电压的解耦,降低预测控制对观测模型的依赖。仿真结果表明IMC可实现正弦输入输出电流,且网侧功率因数接近于1;在设定转速及负载阶跃变化时,响应快、超调小。证明了该方法可实现电机良好动静态性能及网侧单位功率因数,并减少了3路输入电压采样及相应的硬件电路,最终简化AD采样、数字滤波和处理延时。
间接矩阵变换器;输入电压观测;模型预测控制
随着电力电子技术的进步,电力变换器在人类的各项生活、生产领域中都有着不可或缺的作用。间接矩阵变换器(indirect matrix converter,IMC)因其具有能量双向流通、无中间直流储能环节、功率因数可调、体积小、重量轻等诸多优点,在交流电机调速领域中运用越加广泛[1-2]。
IMC-IM系统是一种典型的基于IMC的异步电机调速系统。该系统以往多采用电机矢量控制(VC)与间接矩阵变换器空间矢量脉冲宽度调制(SVPWM)相结合的传统控制方法[3],取得了较好的控制效果。但该方法控制结构复杂,控制器参数繁多不易调节。模型预测控制因其控制结构简单、多变量控制、控制器参数较少等优点,被广泛应用于电力变换器异步电机调速系统中[4]。
文献[5-6]提出在IMC中应用有限状态控制集模型预测控制(FCS-MPC)思想,通过建立电机定子磁链和电磁转矩模型,实现电机高性能调速。而由于电网侧对无功功率的要求,文献[6]建立了输入无功功率的预测模型,实现系统网测性能和异步电机动静态性能的全局优化。但是,预测模型的建立需要间接矩阵变换器的电源电压和电流、输入电压及电机定子电流的采样值,必然使得硬件电路复杂、成本较高、数据处理时间较长,导致硬件电路不易实现。
对此本文提出一种基于输入电压观测的模型预测控制方法,有效简化采样电路,提高硬件实现的可靠性。
1 间接矩阵变换器-双异步电机调速系统拓扑
IMC-IM调速系统结构如图1所示[7],主要由三相交流电压源、IMC及异步电机组成。其中IMC包含输入滤波器、整流级、钳位电路、逆变级4个部分。由电感和电容构成的输入滤波器能够吸收输入电流中由开关动作引起的高频谐波,且整流级电路由6个双向开关Sr1,Sr2,Sr3,Sr4,Sr5,Sr6组成,可实现能量的双向流动。

图1 间接矩阵变换器异步电机调速系统结构图Fig.1 The configuration of IMC-IM system
2 基于输入电压观测的模型预测控制(MPC)方法
2.1 模型预测控制(MPC)
图2为模型预测控制方法结构框图[8],首先基于被控对象的性能要求来选择控制变量X并构建预测模型及品质函数g,然后通过品质函数优化选择最优变量值满足被控对象的性能要求。

图2 模型预测控制方法结构图Fig.2 The construction of MPC method
2.2 基于电压观测的模型预测控制方法
IMC-IM调速系统基于输入电压观测模型预测控制框图如图3所示。
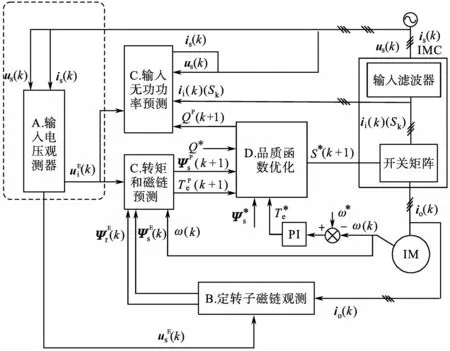
图3 IMC-IM调速系统基于输入电压观测模型预测控制框图Fig.3 Block diagram of MPC method with input voltage observation for IMC-IM drive system
图3中,借鉴MPC思想,模型预测控制方法被应用于IMC-IM调速系统中。此方法为了实现负载侧电机的稳定调速及网测单位功率因数的目标,选择电机电磁转矩、定子磁链及输入无功功率因数进行模型预测寻取最优开关状态,因此需要电源电压 us、电源电流 is、输入电压 ui、输出电流 io、转速n,5组13路信号检测,因此需较繁多的传感器及调理电路,造成采样调理硬件电路成本较高;并且过长的AD采样时间、数字滤波时延及DSP处理时间,会进一步恶化MPC控制方法中运算量大、计算复杂、控制频率较低而导致硬件实现困难,因此采用目前常用的基于DSP的控制器控制周期长,影响控制性能和效果。因此本文设计了输入电压观测器替代了传统采样,如图3虚线框所示。
从图3中可看出基于输入电压观测的MPC方法包括输入电压观测器(A)、电机定转子磁链观测(B)、预测模型(C)、品质函数优化(D)4个部分。首先基于输入滤波器模型设计输入电压观测器,然后根据输入电压观测器和异步电机的状态方程对定转子磁链进行观测,并建立预测模型对所有开关状态下定子磁链、电磁转矩和输入无功功率进行预测,最后根据系统性能要求对品质函数优化,选出IMC最优开关状态。
2.2.1 输入电压观测器设计(A)
根据IMC的输入滤波器模型如图4所示。

图4 间接矩阵变换器输入滤波器结构Fig.4 The construction of input filter of IMC
由图4,可得出下式:

利用欧拉公式对式(1)进行离散化,得:

此时,ui(k-1)通过式(3)观测出来。由于输入相电压ui为连续信号,且采样频率较高,可以近似认为ui(k)≈ui(k-1),即本文所设计的输入电压观测器如下式所示:

2.2.2 电机定转子磁链观测(B)
由文献[7]得,定转子磁链进行观测如下式:

在定转子磁链观测中,输出电压uo(k)是由输入电压观测器的观测值和当前时刻开关状态重组得出,即:

2.2.3 预测模型(C)
1)定子磁链预测模型。
由文献[7]可得定子磁链的预测如下式:

2)电磁转矩预测模型。
IM的稳定运行需要恒定电磁转矩,根据电磁转矩与定子电流的关系[7]可知,要实现对电磁转矩的预测,首先需要定子电流预测,根据异步电机定子动态方程,推得定子电流预测如下式:

因此,根据式(8)、式(9),电磁转矩预测公式为

上述定子磁链和电磁转矩的预测模型中,输出电压预测值uo(k)是由输入电压观测器的观测值和所有开关状态重组,即:

3)输入无功功率预测模型。
由于无功功率会对电网造成污染,所以须实现网测功率因数基本为1,即无功功率Q*=0 var。输入无功功率的预测模型Q与电源电压和电源电流直接相关,考虑到网侧电压在预测过程中基本保持不变,可令us(k+1)=us(k)。而电源电流预测模型建立过程如下:根据IMC输入滤波器数学模型式(1)推导得:

把式(12)带入式(2),得:

对式(13)进行离散化,其中一阶微分采用前项欧拉离散化,二阶微分采用二阶中心差商进行离散,经整理得电源电流的预测模型如下式:


和传统模型预测控制的电源电流预测模型相比,解除了和输入电压采样值的直接耦合,降低预测控制对观测模型的依赖。
把式(14)带入输入无功功率的预测模型实现对IMC的输入无功功率的预测:

2.2.4 品质函数优化(D)
品质函数优化即为选择使品质函数最小的预测模型对应的开关状态作为下一时刻最优开关状态。品质函数表达式如下式:

式中:λ1,λ2,λ3为权重系数,决定变量的优化比重。
3 仿真分析
利用Matlab/Similunk软件进行大量仿真。仿真实验参数为:电源相电压幅值600 V,电压频率50 Hz,系统采样频率50 kHz,IMC输入滤波器电阻Rf=60 Ω,电感Lf=5 mH,电容Cf=20 μF,权重系数 λ1=900,λ2=30 000,λ3=3。IM设置参数为:额定功率Pn=2 200 W,额定电压Un=400 V,额定转速ω=1 500 r/min,定子电阻Rs=2.54 Ω,转子电阻Rr=1.62 Ω,定子电感Ls=0.236 6 H,转子电感Lr=0.236 6 H,互感Lm=0.013 3 H,极对数p=2,转动惯量J=0.05 kg·m2。电磁转矩基准值为14 N·m,定子磁链基准值为0.96 Wb。且IM在t=2 s时转速由800 r/min变化为1 200 r/min,在t=2.3 s时,负载转矩由0 N·m突变为5 N·m,仿真波形如图5~图7所示。
从图5a中可以看出,电机的电磁转矩Te、转速n和磁链Ψsir均能跟随给定基准值变化,转矩脉动较小,而且,电机的定子电流iob具有良好正弦性;图5b中,当电机的转速或转矩在不同时刻发生突变时,超调量较小。
图6表明间接矩阵变换器电源电流与电源电压基本达到同相位,且输入电流的波形正弦性良好,且图7中,通过FF分析得输入电流总谐波含量仅为2.61%,满足了电网对无功功率及谐波含量的要求。

图5 IM动静态性能波形Fig.5 Static and dynamic performance of IM

图6 IMC电源电压us和电流is波形Fig.6 Input voltage usand current isof IMC

图7 is的FFT分析Fig.7 FFT of Input current is
4 结论
本文介绍了一种基于输入电压观测的模型预测控制方法。仿真结果证明:1)异步电机动静态性能良好,实现了高性能调速;
2)系统的输入侧无功功率基本为零,且输入电流谐波含量满足电网要求,表明所提出的电源电流预测模型能够准确实现输入无功功率的预测控制;
3)输入电压观测器的实现,减少了系统采样,可简化采样电路节约成本,最终大大减小DSP采样数据处理的时间,为其进一步研究和软硬件设计提供了理论基础。
[1]徐淑萍,李耀华,苏小会.矩阵变换器电机系统控制策略研究[J].电气传动,2008,38(11):21-24.
[2]郭旭东,黄岗,粟梅,等.双级矩阵变换器驱动IPMSM控制策略的研究[J].电气传动,2013,43(2):52-55.
[3]李生民,邢新波,鲁静.矩阵变换器新型SVPWM调制策略的仿真研究[J].电气传动,2011,41(6)35-39.
[4]Zhang Y,Peng Y,Yang H.Performance Improvement of Two-vectors-based Model Predictive Control of PWM Rectifi⁃er[J].IEEE Transactions on Power Electronics,2016,31(8):6016-6030.
[5]Nkomo M,Nkeh-Chungag B N,Kambizi L,et al.Predictive Torque and Flux Control of an Induction Machine Fed by an Indirect Matrix Converter[C]//IEEE International Conference on Industrial Technology,2010:1857-1863.
[6]Uddin S M M,Mekhilef S,Rivera M,et al.A FCS-MPC of an Induction Motor Fed By Indirect Matrix Converter with Unity Power Factor Control[C]//Industrial Electronics and Applica⁃tions,2013:1769-1774.
[7]Mei Yang,Wang Shanshan,Zhang Xiaoguang.A Model Pre⁃dictive Torque Control Method for Dual Induction Motor Drive System Fed by Indirect Matrix Converter[C]//ECCE Asia,2016:1-5.
MPC Method with Input Voltage Observation for an Indirect Matrix Converter
MEI Yang,WANG Shanshan
(Inverter Technology Engineering Research Center of Beijing,North China University of Technology,Beijing 100144,China)
A novel model predictive control(MPC)method with input voltage observation was proposed for an induction motor drive system fed by indirect matrix converter(IMC).In this method,model predictive control theory was introduced in this system for good performances of the drive system and power grid requirements,and the problems that plenty of sampling for the hardware,the high cost of complex sampling circuit and the long time delay in the traditional MPC theory were solved.Specifically,an input voltage observer was designed based on the model of input filter.Moreover,the direct coupling between input reactive power prediction and input voltage was released.Simulation results show that the input/output currents of IMC are sinusoidal,and the induction motor can operate with a good tracking of torque and speed to their references quickly with a small overshoot.Those prove that a good static/dynamic performance of induction motor and the input/output sinusoidal currents are achieved.Meanwhile,three sampling hardware circuits are decreased.Finally,AD sampling circuit,digital filtering and processing delay are simplified.
indirect matrix converter;input voltage observation;model predictive control
TM921.2
A
10.19457/j.1001-2095.20170601
2016-06-01
修改稿日期:2016-09-18
北京市属高等学校高层次人才引进与培养计划项目(CIT&TCD201404003);
北京市自然科学基金项目(4152013);国家自然科学基金项目(51477003);
北方工业大学长城学者后备(XN070007);北京市科技新星计划(xx2016003)
梅杨(1981-),女,博士,副教授,Email:meiy@ncut.edu.cn
猜你喜欢
防爆电机(2021年1期)2021-03-29
测控技术(2018年2期)2018-12-09
电测与仪表(2016年10期)2016-04-12
铁道科学与工程学报(2015年5期)2015-12-24
深空探测学报(2015年3期)2015-12-07
华东理工大学学报(自然科学版)(2015年2期)2015-11-07
电测与仪表(2015年19期)2015-04-09
电机与控制应用(2015年10期)2015-03-01
电测与仪表(2014年23期)2014-04-04
电测与仪表(2014年11期)2014-04-04
