引信簧片抱球万向惯性触发电开关动态特性
2017-07-12 17:47倪庆乐王雨时严东坡武波涌曹义忠
探测与控制学报 2017年3期
倪庆乐,王雨时,严东坡,闻 泉,武波涌,曹义忠
(1. 南京理工大学机械工程学院,江苏 南京 210094;2.湖南兵器建华精密仪器有限公司,湖南 永州 425024;3.余姚市马渚镇忠义电子器材厂,浙江 余姚 315450)
引信簧片抱球万向惯性触发电开关动态特性
倪庆乐1,王雨时1,严东坡2,闻 泉1,武波涌2,曹义忠3
(1. 南京理工大学机械工程学院,江苏 南京 210094;2.湖南兵器建华精密仪器有限公司,湖南 永州 425024;3.余姚市马渚镇忠义电子器材厂,浙江 余姚 315450)
针对传统惯性触发开关所需惯性过载较大、占用轴向空间也较大的问题,对适用于弹道环境过载较小场合、采用接电爪抱球结构的小尺寸万向型机械式惯性电触发开关,通过ANSYS/LS-DYNA软件仿真,优化设计了结构参数。适当选取接电球材料、支撑筒内径尺寸和接电爪尺寸,该开关可以满足在任意方向受180g冲击过载均可连通,受40g恒定过载均不会连通的设计要求。适当减小接电爪片厚度、宽度或减少片数,增加接电爪片长度,选取弹性模量小的材料,对金属材料进行表面减摩处理或选择陶瓷接电球减小摩擦,增大接电球直径,都可使开关更易于闭合,反之则有利于安全。
机电引信;仿真研究;动态特性;惯性开关;万向发火;擦地炸
0 引言
引信触发开关是利用弹体碰击目标时的反作用力或前冲力闭合,以接通电路,使电起爆元件发火的装置,通常分为碰击触发开关和惯性触发开关两类。其中惯性触发开关一般安排在弹体(引信)内的合适位置,利用弹体碰击目标时感受到的前冲力而闭合[1]。
文献[2]分析了子母弹子弹碰目标时的受力状态并讨论了影响引信万向发火机构作用灵敏度的因素。文献[3]建立了炮射子母弹子弹引信惯性锤式万向触发机构动力学模型,并分析了以输入加速度为参量的机构解除保险角度与时间的关系,指出输入加速度较小时,增加惯性锤质量对提高机构触发灵敏度作用显著。文献[4]对弹底引信擦地炸惯性发火机构闭合响应时间进行了分析,并通过试验验证引信擦地炸作用率不小于90%。文献[5]介绍了一种单兵亚音速火箭弹引信擦地炸惯性触发开关,讨论了各设计参数对开关闭合灵敏度的影响。文献[6]运用ANSYS/LS-DYNA软件对一种弹头触发引信擦地炸惯性发火机构碰击目标过程进行数值仿真,得到了超口径尾翼对擦地炸性能影响规律。文献[7]针对弹簧压球结构的引信惯性球电触发开关方向敏感性问题进行了分析和计算,并提出了提高惯性球电触发开关触发灵敏度的方法。上述文献中关于惯性触发开关的介绍均属于球压弹簧的结构,具备万向发火性能,但发火所需惯性过载较大,且占用轴向空间也较大。针对上述球压弹簧结构进行改进,诞生了应用“弹簧-质量”振动系统原理设计的一种适用于弹道环境过载较小场合、采用接电爪抱球结构的小尺寸万向型机械式惯性电触发开关。本文通过ANSYS/LS-DYNA软件仿真分析验证其可行性。
1 惯性开关
1.1 “弹簧-质量-阻尼”系统原理简介
惯性开关的典型结构是“弹簧-质量-阻尼”系统,工作原理见图1。其中,c为阻尼,F为辅助作用力,y(t)和z(t)分别是质量块和开关壳体相对于惯性空间的位移量。
质量块经弹簧和阻尼器与壳体相连,在惯性力作用下,质量块与触点接触,当惯性力大于设计值时,惯性开关接通电路[8]。
在惯性激励a(t)作用下系统的力学平衡方程可表示为
x″+2ξΩx′+Ω2x=aF(t)-a(t)
(1)

本文涉及的开关结构与普遍采用的“弹簧-质量”系统有所不同,原理结构如图2所示。其中支撑筒作为固定电极,接电爪既作为弹性阻尼构件,又作为动电极。接电球在惯性力作用下运动,挤压接电爪片,接电爪在片接电球压力作用下产生弯曲变形,当接电球对接电爪片的压力足够大时,接电爪片变形量足以使其与支撑筒内壁接触,从而接通电路。
该结构上、下对称,同类零件均有两个,从而实现“万向”敏感触发。接电爪片弯折角度α(图3)以装配时与接电球相切为准。在一种设计方案中,经三维建模测得接电爪片向上弯折至α=76.7°时刚好与接电球相切。
1.2 建模及仿真
根据原理图及各零件尺寸建立三维模型,所建三维模型半剖后如图4所示。
先在SolidWorks中建好整个惯性开关的三维模型,然后导入到ANSYSWorkbench中添加材料、划分网格,通过输出k文件到ANSYSLS-DYNA中计算。建立有限元模型如图5所示。开关断开状态和闭合状态分别如图6和图7所示(剖面位置为图3中的A-A)。
拟定该惯性开关在任意方向受180g以上过载必须闭合,任意方向受40g以下过载必须不闭合。外径不大于6 mm,长度不大于10 mm。
在仿真过程中,180g过载系对松土地面的触发冲击过载,根据测试结果近似按正弦规律施加,脉宽设定为2 ms;40g过载系系统提出的安全过载要求,按恒定值施加。接电爪材料选择为铍青铜合金QBe1.9,接电球材料选择为H62黄铜,其动态特性仿真用性能参数列于表1。H62黄铜球与接电爪之间的摩擦系数f取为0.15[9]。
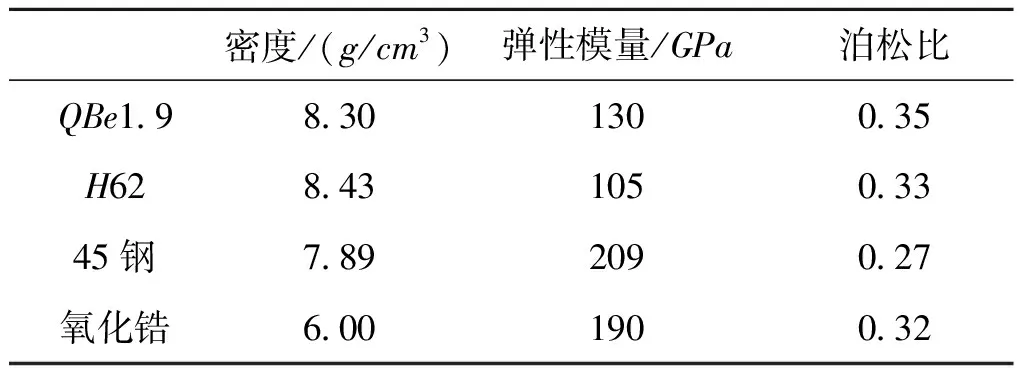
表1 接电球和接电爪动态特性仿真用材料参数
设计支撑筒内径3.80 mm,接电爪厚0.1 mm、长4.2 mm、宽0.4 mm。先将施加过载方向取在一接电爪对称面内仿真。在该对称面内调整过载施加方向与水平方向夹角β(图3),分别取β为0°,10°,20°,30°,40°,50°,60°,70°,80°,90°,仿真表明,机构在180g触发过载下均能连通开关,在40g安全过载下均不能连通开关。
在上述尺寸不变的条件下,仅将过载施加方向改在接电爪两蝶片中间的对称面内,再次进行仿真。从理论上讲该情况最不利于开关闭合,所以仅仿真180g触发过载下开关的闭合情况。仿真表明,机构在180g触发过载下仍均能连通开关。由此可知,接电球材料为H62黄铜时上述开关各组成零件尺寸下能满足设计要求。
该条件下在不同方向上分别作用180g触发过载、40g安全过载,另外施加假定峰值为120g的触发过载、80g安全过载,仿真所得四种情况下开关闭合时间列入表2中,表中“—”表示开关未必合。
由表2可看出,开关在不同方向上受到相同过载时,闭合时间略有不同,β为约30°时,闭合时间最短;β为约80°时,闭合时间最长。由此可以看出:该开关机构闭合的敏感方位为β约30°,不敏感方位为β约80°。为节约时间成本,在机构仿真和测试过程中,可根据情况主要针对上述敏感或不敏感方位进行。
将接电球材料换为45钢(性能参数见表1),仅将接电爪片厚度减为0.09 mm,其它尺寸不变。仿真表明,该机构能满足设计要求;将接电球材料换为氧化锆陶瓷(性能参数见表1),接电爪片厚度减薄为0.08 mm,仿真表明,该机构也能满足设计要求。

表2 不同方向不同过载作用下的开关闭合时间
1.3 开关可复位性验证
开关在勤务处理过程中可能受冲击惯性力作用而意外闭合,即接电球可能会运动而使接电爪接触支撑筒内壁,但此时电源尚未接入,闭合仅是开关的机械动作,并无接电后果。接电球和接电爪在冲击惯性力消失后能否复位直接关系到弹药使用安全性和可靠性。对开关施加图8所示的过载,该过载初始段为一模拟跌落冲击的、脉宽300 μs、峰值15 000g的三角形脉冲,之后仅施加重力。通过仿真模拟接电球在冲击惯性力消失后的运动状态,探讨开关的可复位性。仿真得到接电球的运动位移如图9所示。
由图9可以看出,接电球在冲击惯性力作用下在上、下两个接电爪之间振动,最大位移为1.1 mm,在冲击惯性力消失后接电球运动趋于平稳,至5 ms前最后一次振动的最大位移为0.04 mm,因此可以认为接电球在冲击惯性力消失后能够可靠复位。
实际的跌落冲击过程包含多个振幅逐渐减小的脉冲,但增加的脉冲只会增多接电球在接电爪之间的振动次数,当冲击脉冲消失后接电球仍能复位。
1.4 开关周向闭合性能一致性分析
接电爪作为动电极,直接影响开关接电性能。为保证开关周向闭合一致性,在零件设计过程中采取了以下措施:
1)将开关内筒设计为底座-支撑筒-限位筒-支撑筒-底座分段式结构,每种零件均有同轴度要求,并且在图纸中注明要求采用一次装夹完成加工;
2)采用特定夹具及冲压工艺使接电爪弯折和点铆在同一工步中完成,从而保证接电爪周向弯折角度一致,且接电爪与内筒同轴。
2 设计参数对开关接电机械动作的影响
为探讨各零件尺寸对开关接电机械动作即接电爪张开角度的影响,在设置支撑筒尺寸不会阻挡接电爪张开的条件下,调整接电爪片厚度、宽度及长度、接电爪片数、接电爪弹性模量、接电球与接电爪之间摩擦系数、接电球直径七个因素进行仿真,因接电爪张开角度不便于计算机仿真过程中的测量,故以接电爪尾部张开位移为评价参数。该张开位移越大,越利于开关闭合。
2.1 接电爪片尺寸的影响
选取球体材料为45钢,将接电爪片宽度设为0.4 mm,长度设为4.2 mm,改变接电爪片厚度分别为0.10 mm,0.09 mm,0.08 mm,0.06 mm进行仿真,结果列于表3。

表3 接电爪片厚度对其张开位移的影响
由表3可以看出接电爪片厚度的变化对其张开角度影响较大,较薄的接电爪更易识别小过载,且易于闭合。
将接电爪片厚度取为0.1 mm,长度不变,宽度由0.4 mm增大为0.6 mm,仿真得接电爪张开位移为0.036 2 mm,说明接电爪片宽度越窄越易识别小过载,且易于闭合,但影响较小。
将接电爪片厚度取为0.1 mm,宽度不变,长度调整为4.5 mm,使上、下接电爪在结构中刚好不干涉,仿真得接电爪张开位移为0.133 6 mm,说明接电爪片长度对其张开距离影响较大,接电爪片越长越易识别小过载,且易于闭合。
2.2 接电爪片数的影响
除接电爪尺寸外,接电爪片数也是影响开关机械动作的一个因素。保持接电球材料为H62黄铜,接电爪片长4.2 mm,宽0.4 mm,厚0.1 mm不变,取接电爪片数分别为8,9,10,11进行仿真,结果列于表4。

表4 接电爪片数对其张开位移的影响
由表4可以看出,随着接电爪片数的增加,接电爪张开位移减小,但接电爪片数越多,两接电爪之间夹角越小,开关闭合动作对横向过载施加方向越不敏感,万向性越好。因此在设计过程中应合理选择接电爪片数。
2.3 接电爪材料弹性模量的影响.
使用环境温度会对材料力学性能产生影响,保持接电球材料为H62黄铜,接电爪片长4.2 mm,宽0.4 mm,厚0.1 mm不变,改变接电爪材料弹性模量E分别为120 GPa,125 GPa,130 GPa,135 GPa,140 GPa进行仿真,分析材料弹性模量对接电爪张开位移的影响,所得结果列于表5中。
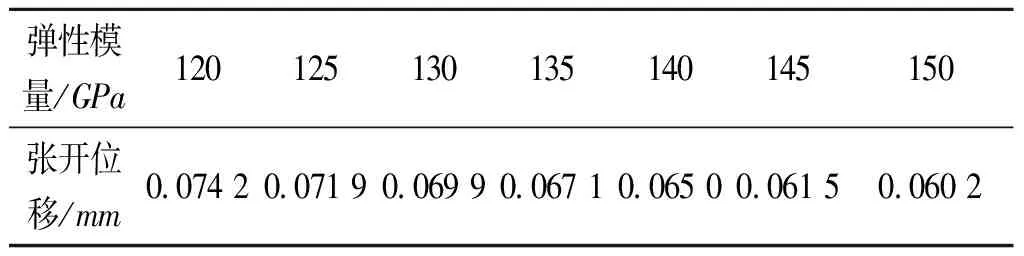
表5 材料弹性模量对接电爪张开位移的影响
由表5可以看出,随着接电爪材料弹性模量的增大,接电爪张开位移减小,因此在设计机构参数时应注意根据开关使用环境考虑材料力学性能的变化。
2.4 摩擦系数的影响
保持接电球材料为H62黄铜,接电爪片厚0.06 mm,长4.2 mm,宽0.4 mm不变,改变接电球与接电爪之间的摩擦系数分别为0.10,0.15,0.20,0.25,0.30进行仿真分析,仿真结果列于表6。

表6 摩擦系数对接电爪张开位移的影响
由表6可看出,随着接电球与接电爪间摩擦系数变小,接电球在过载作用下运动阻力变小,接电球的运动也更易传递到接电爪上,接电爪张开位移也越大。因此在设计过程中对金属材料进行表面减摩处理或选择陶瓷材料减小摩擦更易区分不同过载。
2.5 接电球直径对接电爪张开位移的影响
接电球直径会影响接电球质量以及接电爪初始张开角度,保持接电球材料为H62黄铜,接电爪片长4.2 mm,宽0.4 mm,厚0.1 mm不变,选取接电球直径为2.5 mm,3.0 mm,3.5 mm,4.0 mm进行仿真,仿真结果列于表7。

表7 接电球直径对接电爪张开位移的影响
由表7可以看出,接电球直径对接电爪张开位移的影响较大。直径越大,接电球质量也就越大,接电球所受惯性力与接电爪对接电球的支撑力之间的夹角也越小,因此直径越大的接电球作用于接电爪上的力越大,更有利于开关闭合,但接电球直径受到支撑筒内径和接电爪尺寸的限制,在设计过程中需选择合适的接电球直径。
2.6 加工误差的影响
接电球材料选择H62黄铜,考虑加工误差的影响,对支撑筒内径以及接电爪片厚度、长度、宽度尺寸的散布对机构的影响进行仿真分析。得到:支撑筒内径在3.80~3.95 mm、接电爪片厚度在0.08~0.1 mm、长度在4.1~4.3 mm、宽度在0.3~0.5 mm时开关接电特性均可满足设计要求。
2.7 接电球材料的影响
接电球材料影响其质量以及接电球与接电爪之间的摩擦系数,氧化锆陶瓷材料表面光滑,但是密度略小于H62黄铜和45钢,现保持接电爪片长4.2 mm,宽0.4 mm,厚0.1 mm不变,接电球材料分别选择H62黄铜、45钢、氧化锆陶瓷进行仿真,仿真结果列于表8。

表8 接电球材料对接电爪张开位移的影响
由表8可以看出,比较接电球材料为H62黄铜和45钢,由于H62黄铜密度大,质量也大,因此接电爪张开位移也较大;比较接电球材料为45钢和氧化锆陶瓷,虽然氧化锆陶瓷的密度小于45钢,但由于其表面光滑,摩擦系数小,更易将接电球所受的惯性力传递到接电爪,更利于开关的闭合。因此,接电球材料可选择密度尽量大的陶瓷材料以利于开关闭合。
3 试验验证
加工出的开关样品如图10所示,其接电爪材料为12Cr17Ni7不锈钢带,厚度0.1 mm,宽度0.3 mm,支撑筒内径为4.2 mm,限位筒内径为3.1 mm,接电球直径3.5 mm,材料为不锈钢。将开关置于离心机上以离心力模拟前冲过载进行接电试验,通过调整离心机转速改变前冲过载并通过显示灯观察开关闭合情况,知开关轴向闭合过载为96g,径向闭合过载为121g。采用上述尺寸和材料按本文方法建立三维模型并进行仿真,得到开关的轴向闭合过载为85g,径向闭合过载为110g,均略小于实验结果。其原因很可能是开关加工过程中每一接电爪的弯折角度α不会完全相同且并不会恰好与接电球相切,而是要略小于相切时的弯折角,以此来保证接电爪与接电球的可靠接触,即在接电爪与接电球之间存在预紧力。由于该预紧力难以计算,故在仿真过程中未添加该力,从而导致仿真过程中接电爪在过载作用下更易变形,即闭合过载值也会比实际值系统性偏小,说明仿真结果基本可信。
4 结论
本文应用LS-DYNA软件仿真了结构简单、易于加工的机械式万向惯性触发电开关动态特性。仿真表明,通过适当地选取接电球材料、支撑筒内径尺寸和接电爪尺寸,该开关可以满足在任意方向受180g冲击过载均可连通开关,受40g恒定过载均不会连通开关的设计要求。在设计过程中可通过适当减小接电爪片厚度、宽度或减少片数,增加接电爪片长度,选取弹性模量小的材料,对金属材料进行表面减摩处理或选择陶瓷接电球减小摩擦,增大接电球直径来使开关更易于闭合,反之则有利于安全。
[1]唐尚华,刘勇涛,孙慧. 触发装置技术剖析与发展趋势[J]. 战术导弹技术,2013(2):108-113.
[2]王华,宋丽萍. 万向着发机构灵敏度及影响因素分析[J]. 太原机械学院学报,1992(3):221-224.
[3]谭惠民,王玉杰,李芝绒. 子弹引信万向着发机构动力学分析[J]. 北京理工大学学报,1994(4):391-397.
[4]安晓红,顾强,张亚,等. 机电引信擦地炸惯性发火机构设计与分析[J]. 弹箭与制导学报,2010(3):85-87.
[5]曹苏雅拉图. 某单兵火箭机电触发引信关键技术研究[D]. 南京:南京理工大学,2011.
[6]杨翔,王雨时,闻泉. 超口径位移对弹头引信擦地炸性能的影响[J]. 探测与控制学报,2015(1):5-10.
[7]刘鹏,王雨时,武波涌,等. 引信惯性球电触发开关方向敏感性[J]. 探测与控制学报,2016,38(2):1-5.
[8]陈光炎,王超. 微惯性开关设计技术综述[J]. 信息与电子工程,2009,7(5):439-442.
[9]安彦飞. 某导弹惯性点火器相关技术仿真与实验研究[D]. 南京:南京理工大学,2013.
Dynamic Characteristics of Fuze Spring Holding Ball Inertia Electric and Percussion Universal Switch
NI Qingle1,WANG Yushi1,YAN Dongpo2,WEN Quan1,WU Boyong2,CAO Yizhong3
(1.School of Mechanical Engineering, NUST, Nanjing 210094, China; 2.Hunan Weapons Jianhua Precision Instrument Co. Ltd. Yongzhou 425024, China; 3.Yuyao Mazhu Town Zhongyi Electronic Equipment Factory, Yuyao 315450, China)
The traditional inertia trigger switch required large inertia overload and axial space. To solve the problem, ANSYS/LS-DYNA software was used to analysis the electrical connection paw holding ball and small universal mechanical inertia electric and percussion switch, which is suitable for low environmental overload. The material of electrical connection ball, support tube diameter size and electrical connection paw size were properly selected. The switch could be communicated by 180 g shock overload in any direction, and not be communicated by 40 g constant overload. Appropriate reduction of the electrical claw thickness, width or reducing the number of pieces, or increasing the length of the electrical connection claw piece, or selecting a small elastic modulus material, metal material surface friction-reducing treatment, or choose ceramic electrical connection ball decreasing friction, or increasing the diameter of the electrical connection ball, could make the switch closed easier, otherwise, it would be safer.
electromechanical fuze; simulation research; dynamic characteristics; inertia switch; universal firing; graze impact burst
2016-12-26
倪庆乐(1991—),男,河北衡水人,硕士研究生,研究方向:引信设计及其动态特性。E-mail:niqingle@126.com。
TJ43
A
1008-1194(2017)03-0030-06
猜你喜欢
煤矿机电(2021年6期)2022-01-19
科技与创新(2021年1期)2021-01-19
校园英语·中旬(2019年11期)2019-11-26
中学物理·高中(2019年8期)2019-09-20
有色金属材料与工程(2018年4期)2018-11-25
科技创新与应用(2018年27期)2018-09-29
三联生活周刊(2017年38期)2017-09-19
有色金属材料与工程(2014年1期)2014-09-14
有色金属材料与工程(2013年4期)2013-12-27
竞争力(2009年3期)2009-04-08