
单轨车辆耦合动力学模型与振动响应特性
2017-07-01 23:14文孝霞杜子学许舟洲尹燕莉隗寒冰
振动、测试与诊断 2017年3期
文孝霞, 杜子学, 许舟洲, 尹燕莉 , 隗寒冰
(1. 重庆交通大学机电与车辆工程学院 重庆,400074) (2. 重庆交通大学轨道交通研究院 重庆,400074)
单轨车辆耦合动力学模型与振动响应特性
文孝霞1, 杜子学2, 许舟洲1, 尹燕莉1, 隗寒冰1
(1. 重庆交通大学机电与车辆工程学院 重庆,400074) (2. 重庆交通大学轨道交通研究院 重庆,400074)
为了研究单轨车辆在设计车速范围内的振动响应特性,进而评价单轨车辆运行平稳性与舒适性能,分析了单轨车辆走行轮、导向轮、稳定轮和转向架中央牵引装置及车体间的拓扑关系,利用Hamilton方程构建了包含走行轮与轨道梁顶部,导向轮、稳定轮与轨道梁侧部等三向轮轨接触对的单轨车辆空间耦合系统动力学模型,并对单轨的PC轨道梁走行面及轨道梁左、右两侧部轨面的不平度进行了数值模拟。基于空间耦合动力学模型,以轨道不平度为激励源,设定车辆以某一恒定速度在直线轨道上运行,获取了单轨车辆的振动响应特性,并与实车测试结果对比分析,验证了单轨空间耦合动力学模型的正确性。在此基础之上,获取了单轨车辆不同设计车速下的振动响应特性,对单轨车辆的运行平稳性和舒适性进行了评价。结果表明,单轨车辆的舒适性能优良,运行平稳性能处于优秀等级。
单轨车辆;耦合动力学模型;接触模型;轨道不平激励;振动;平稳性
引 言
作为城市轨道交通的一种典型制式,跨座式单轨交通具有独特的走行系统,不仅走行轮与轨道梁顶部轨面附着接触,分布在转向架构架边角的导向轮与固定在构架中间两侧的稳定轮分别与轨道梁侧部轨面附着接触。单轨车辆运行过程中,轨道梁顶部轨面与两侧部轨面的不平度都将成为输入激励源,影响着单轨车辆的动力响应特性,从而影响单轨车辆的运行品质,制约着单轨车辆进一步推广应用。
为获取单轨车辆在不同工况下的动力响应特性,需建立单轨车辆空间耦合动力学模型[1-2],国内外对单轨系统的研究主要以轨道梁为研究对象,开展车桥耦合振动研究。笔者以单轨车辆为研究对象,除了单轨车辆垂向和横向自由度外,增加考虑单轨车辆车体、前后转向架纵向自由度。单轨与车体间牵引橡胶堆,在轮轨接触模型中,考虑走行轮与轨道梁顶部轨面,导向轮、稳定轮与侧部轨面的径向接触模型,研究建立较为完整的包含走行轮与轨道梁顶部,导向轮、稳定轮与侧部轨面等三向轮轨接触对的单轨车辆空间耦合系统动力学模型。以轨道梁走行面和两个侧部轨面的不平度为输入激励,对单轨车辆的动态响应特性进行研究。
1 跨座式单轨车辆动力学建模
1.1 单轨车辆建模
跨座式单轨车辆由车体和前、后转向架组成,如图1所示。其中:转向架上走行轮通过一根驱动轴支承在构架上,走行轮与轨道梁顶部接触,承受车辆垂直载荷并传递牵引力和制动力给轨道梁;4个导向轮分布在构架边角,在轨道梁侧部引导车辆沿轨道行驶;2个稳定轮对称分布在构架中间两侧,紧靠轨道梁侧面下部行驶,起着稳定车辆的作用。车体坐落在空气弹簧上,通过中心销牵引,中心销上端固定在车体上,下端转向架上的中心销座固连,中心销座通过牵引橡胶堆与转向架连接。
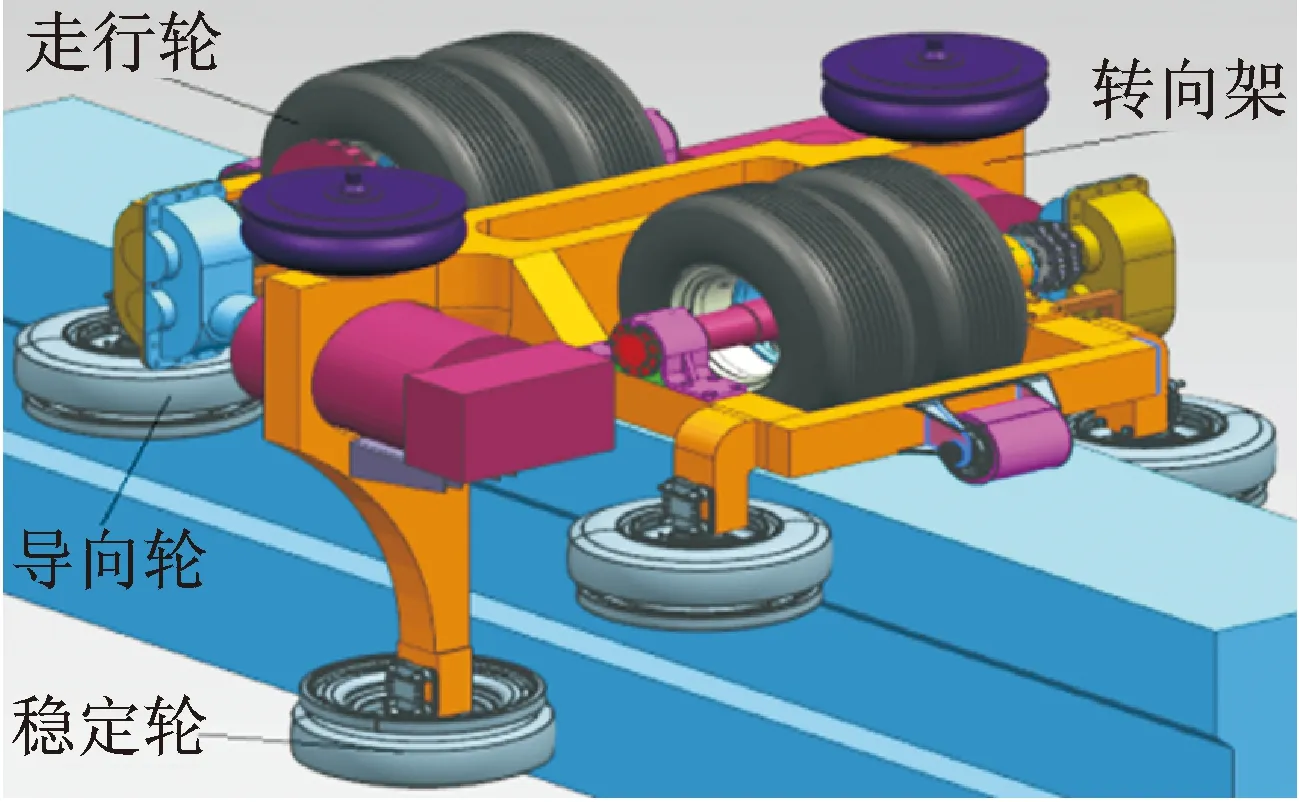
图1 单轨车辆转向架图Fig.1 The structure of the monorail bogie
建立动力学模型时,为降低模型复杂度,简化运算,单轨车辆中涉及的弹性元件如空气弹簧、导向轮、稳定轮与走行轮轮胎特性及牵引橡胶堆等均用线性弹簧模拟[3-4]。单轨车辆动力学模型中,考虑单轨车体及前后转向架的纵向、横向及垂向3个移动自由度和绕x,y,z三个轴的侧滚、俯仰及摇头转动自由度,共计18个自由度,如图2(a)所示。中央悬挂中的牵引橡胶堆用弹簧模拟,如图2 (b)所示。
图2中:M为质量;K为弹簧刚度;C为阻尼系数;x,y,z,θ分别为纵向、垂向、横向和角位移。
采用哈密顿原理建立多自由度的大型复杂结构车辆系统动力学方程[5]
(1)
其中:T为动能;U为势能;δW为系统保守力和非保守力所做虚功总和;δ为变分符号。
单轨车辆在轨道梁上运行时的动能、势能和虚功表达如下


(2)
(3)
(4)
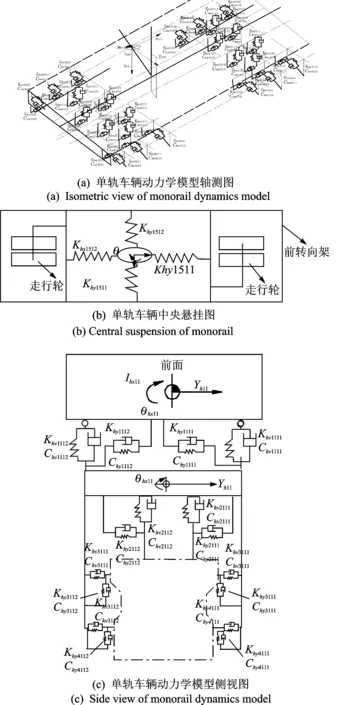
图2 单轨车辆动力学模型图Fig.2 Monorail vehicle dynamics model

式(3)中Rhxirjn,Rhyirjn,Rhzirjn3个方向的相对位移可以通过下式计算
Rhyi1jn=Yh11-Yv2i-θhx11Lhz1+(-1)iθhz11Lhxi
Rhvi1jn=Zh11-Zh2i+(-1)nθhx11Lhy2+
(-1)nθhx2iLhy2-(-1)iθhy11Lhxi
Rhxi2jn=Xh2i-(-1)jθhx2iLhx4+(-1)jθhy2iLhx3
Rhyi2jn=Xh2i-(-1)jθhx2iLhx3+(-1)jθhz2iLhx3
Rhvi2jn=Zh2i-(-1)jθhy2iLhx3+
(-1)nθhx2iLhy4-W02ijn
Rhxi3jn=Xh2i+(-1)jθhy2iLhx3
Rhyi3jn=Yh2i+(-1)jθhz2iLhx4+θhx2iLhx3-W03ijn
Rhvi3jn=Zh2i-(-1)jθhy2iLhx3
Rhxi4jn=Yh2i+(-1)jθhy2iLhx3
Rhyi4jn=Yh2i+θhx2iLhx3+(-1)jθhz2iLhx3-W04ijn
Rhvi4jn=Zh2i+(-1)jθhy2iLhx3
Rhxi5jn=(-1)jRhx3ijn
Rhyi5jn=(-1)jRhy3ijn
其中:W0rijn(r=2,3,4)为轨面不平位移;θhx11为车体侧滚角;θhz11为转向架摇头角;θhx2i为转向架侧滚角;θhy2i为转向架点头角;θhz2i为转向架摇头角;Lhx1,Lhx2为车体质心到前、后空气弹簧安装点纵向距离;Lhx3,Lhx4为转向架质心到导向轮、稳定轮纵向距离;Lhy2为车体质心到空气弹簧安装点横向距离;Lhy3为转向架质心到导向轮轮心距离;Lhy4为转向架质心到稳定轮轮心距离。
1.2 轮轨接触模型
跨座式单轨交通车辆与轨道间接触形式独特,走行轮与轨道梁顶部轨面、导向轮与稳定轮在预压力作用下紧贴两轨道侧面,单轨车辆走行轮、导向轮、稳定轮与“3个轨面”附着接触。建立走行轮与轨道梁顶部,导向轮、稳定轮与轨道梁侧部轨面的接触模型[6]。走行轮与顶部轨面法向作用力如下。
走行轮与轨道梁顶部接触模型为
(5)
导向轮、稳定轮与轨道梁侧部接触模型为
(6)
(7)
其中:mh11为车身质量;mh2i为转向架质量;lvx1为车身质心到前空气弹簧距离;lvx为前后空气弹簧距离;khvi2jn,khvi3jn,khvi4jn为走行轮、导向轮、稳定轮垂向刚度;Rhvi2jn,Rhvi3jn,Rhvi4jn为转向架质心垂向、导向轮、稳定轮横向相对位移;chvi2jn,chvi3jn,chvi4jn为走行轮垂向、导向轮及稳定轮径向阻尼;Fvi3jn为走行轮与侧部轨面间法向接触力;Fvi4jn为稳定轮与轨面间法向接触力。
2 PC轨道梁轨面不平度模拟
跨座式单轨在轨道梁上运行,轨道不平度是模型的输入激励源,需开展单轨车辆轨道不平度数值模拟。重庆市跨座式交通单轨PC轨道梁是预应力混凝土等截面简支梁结构,为增大其附着力,在其表面浇筑混凝土。从跨座式单轨PC轨道梁结构和浇筑工艺可看出,PC轨道梁与铁道车辆和地铁车辆采用的钢轨具有较大差异,与汽车行驶的混凝土路面具有一定相似性。因此,跨座式单轨车辆的轨道不平度模型采用ISO8608路面模型,其路面功率谱密度PSD为
(8)
其中:Ω为空间频率(次/m);α,β和n分别为路面粗糙度系数、形状系数和PSD功率谱指数系数。
根据轨道梁谱数据,通过功率谱拟合,α,β和n数据取值分别如下:轨道梁顶部走行轮走行面系数取值;a=0.000 4,β=0.31,n=3.1;轨道梁侧部导向轮接触面参数取值;a=0.000 7,β=0.61,n=2.9;轨道梁侧部稳定轮接触面参数取值;a=0.000 7,β=0.5,n=2.7。

(9)
其中:Gx(nk)为功率谱密度函数;N为采样点总数;ΔL为采样间隔;Xm为不平度函数。
根据功率谱密度函数重构的轨道梁走行面和两侧部轨面不平度模拟[8]如图3所示。
为比较轨面等级,再通过傅里叶变换可得轨道梁走行面、侧部接触面不平度Xm的功率谱密度,不平度模拟样本的功率谱密度函数如图4 所示。

图3 轨道梁顶部、侧部不平度 Fig.3 Top and side surface roughness of track beam
由图4可知,跨座式单轨车辆轨道梁的3个轨面不平度功率谱密度等级较高,其中不同颜色的直线分别表示ISO8608车用道路A,B,C,D,E,F,G,H共8个车用道路等级,其路面功率谱密度[9]为
与ISO8608车用道路标准比较,轨道梁顶部走行面、导向面和稳定面均处于A~B等级之间。
3 单轨车辆动力学模型验证
3.1 单轨动力学模型仿真分析
基于前述建立的模型,进行动力学仿真分析,动力学模型中各参数如表1所示。
仿真计算后,截取单轨车辆质心处横向方向和垂向方向的加速度时间历程的频谱如图5所示。

图5 单轨车体质心加速度频谱图(仿真)Fig.5 Monorail centroid acceleration spectrum (simulation)
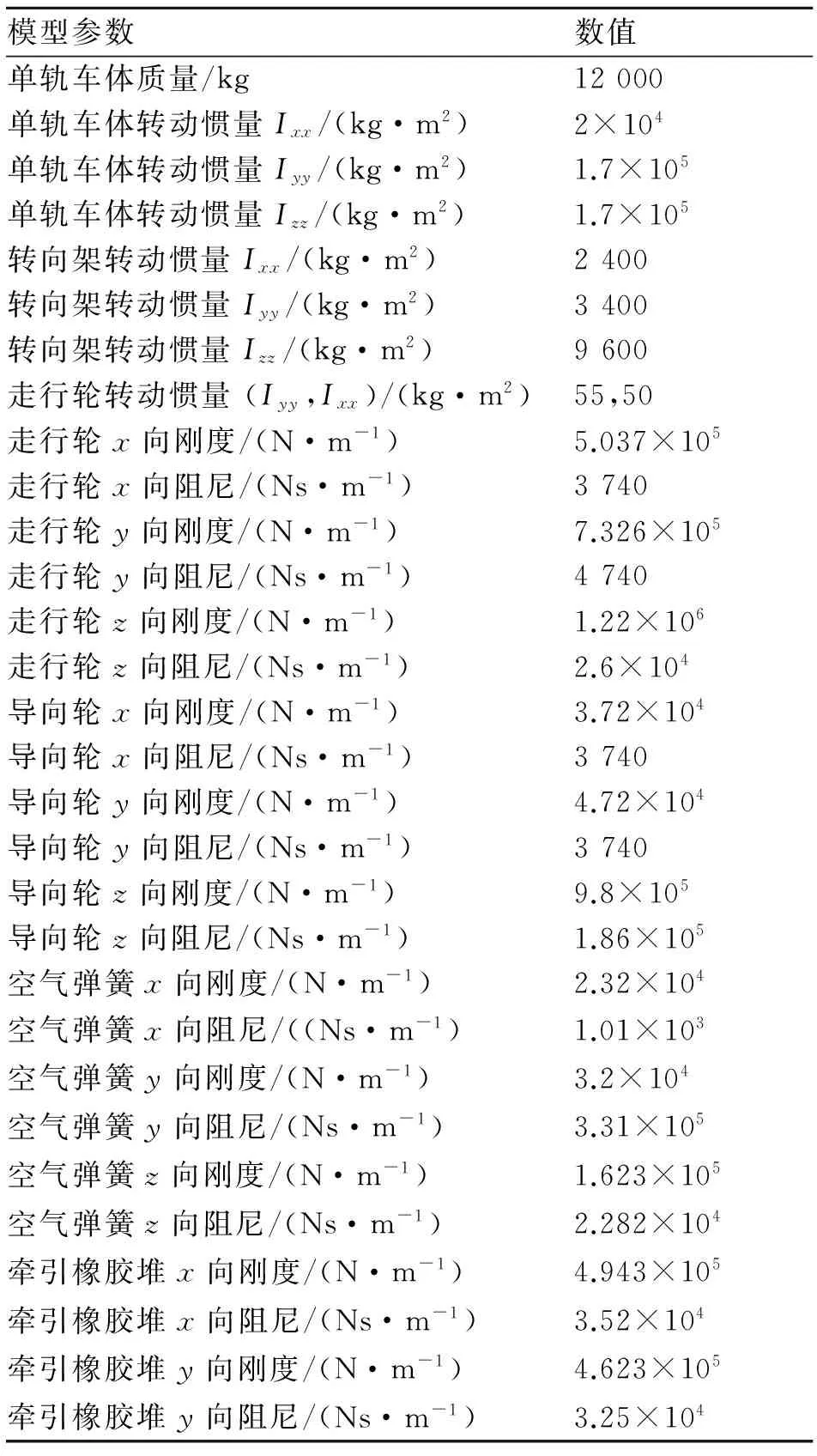
模型参数数值 单轨车体质量/kg12000单轨车体转动惯量Ixx/(kg·m2)2×104单轨车体转动惯量Iyy/(kg·m2)1.7×105单轨车体转动惯量Izz/(kg·m2)1.7×105转向架转动惯量Ixx/(kg·m2)2400转向架转动惯量Iyy/(kg·m2)3400转向架转动惯量Izz/(kg·m2)9600走行轮转动惯量(Iyy,Ixx)/(kg·m2)55,50走行轮x向刚度/(N·m-1)5.037×105走行轮x向阻尼/(Ns·m-1)3740走行轮y向刚度/(N·m-1)7.326×105走行轮y向阻尼/(Ns·m-1)4740走行轮z向刚度/(N·m-1)1.22×106走行轮z向阻尼/(Ns·m-1)2.6×104导向轮x向刚度/(N·m-1)3.72×104导向轮x向阻尼/(Ns·m-1)3740导向轮y向刚度/(N·m-1)4.72×104导向轮y向阻尼/(Ns·m-1)3740导向轮z向刚度/(N·m-1)9.8×105导向轮z向阻尼/(Ns·m-1)1.86×105空气弹簧x向刚度/(N·m-1)2.32×104空气弹簧x向阻尼/((Ns·m-1)1.01×103空气弹簧y向刚度/(N·m-1)3.2×104空气弹簧y向阻尼/(Ns·m-1)3.31×105空气弹簧z向刚度/(N·m-1)1.623×105空气弹簧z向阻尼/(Ns·m-1)2.282×104牵引橡胶堆x向刚度/(N·m-1)4.943×105牵引橡胶堆x向阻尼/(Ns·m-1)3.52×104牵引橡胶堆y向刚度/(N·m-1)4.623×105牵引橡胶堆y向阻尼/(Ns·m-1)3.25×104
3.2 仿真与试验测试结果对比验证
为验证模型仿真结果的正确性,项目组采用压力传感器、三向加速度传感器和德国IMC数据采集系统,如图6所示。当单轨车辆在重庆童家院子至郑家院子线路段直线运行时,分别对单轨车体几何中心地板处布置三向加速度传感器,进行了测试和采集试验。
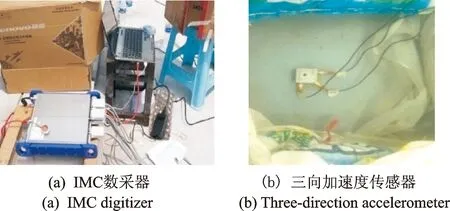
图6 单轨实车振动加速度测试Fig.6 Monorail vibration acceleration test
为验证仿真模型的正确性,将试验测试的横向与垂向加速度与仿真的横向与垂向加速度频谱图进行对比[10],加速度试验数据与仿真数据在横向与垂向两个方向频谱对比分别如图7所示。
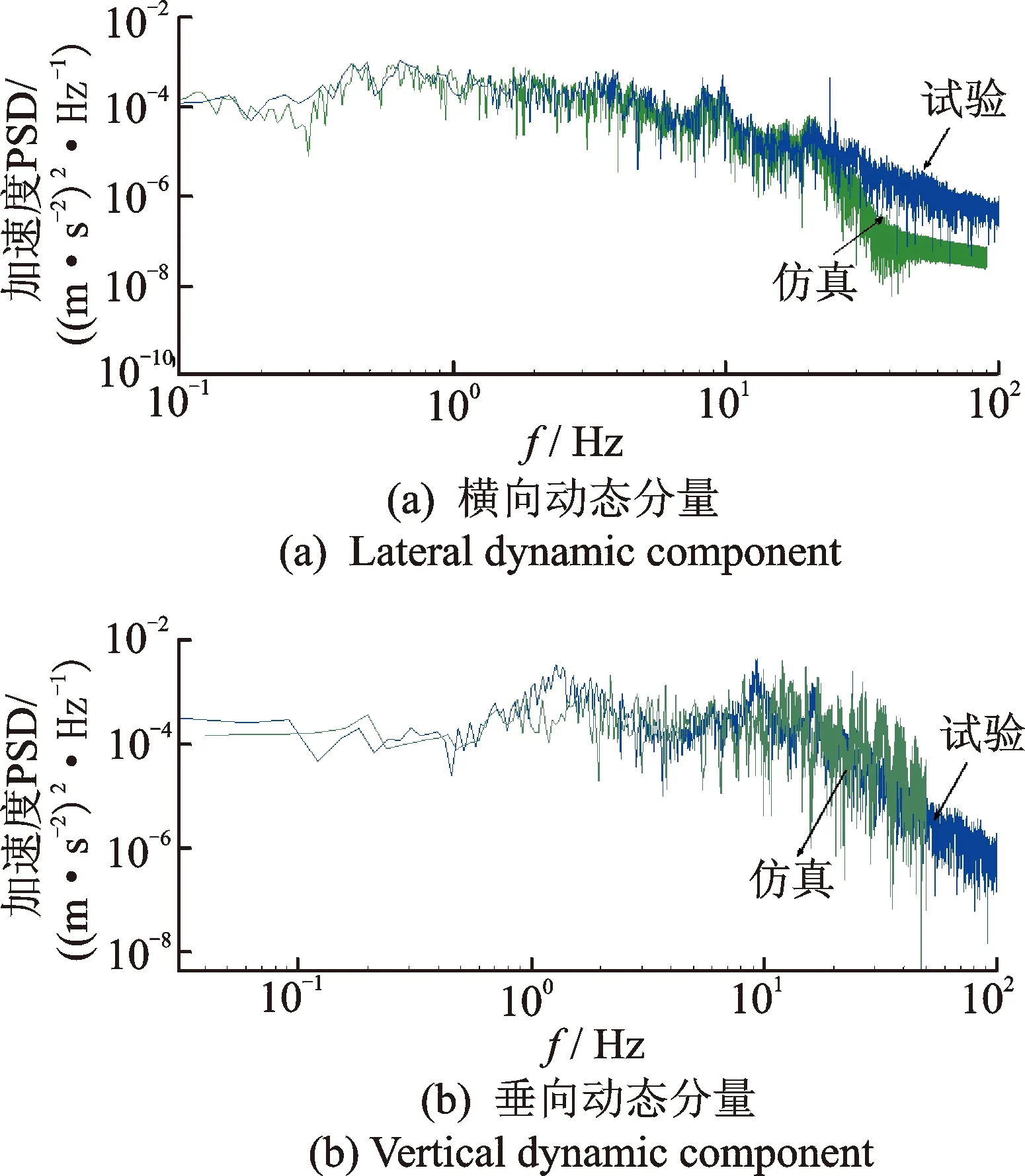
图7 试验与仿真频谱对比图Fig.7 Spectrum comparison of experimental and simulation
从图7(a)中可看出,实测的单轨车辆横向加速度试验频谱曲线在低频段吻合较好,高频段实测频谱幅值稍大于仿真幅值。图7(b)中,也可看到实测的单轨车辆垂向加速度试验频谱曲线在低频段吻合较好,高频段实测频谱幅值稍大于仿真幅值。通过对比单轨车辆仿真加速度频谱曲线与实测加速度频谱曲线,在0~80 Hz频段范围内,幅值具有较高的一致性。单轨车辆正常行驶频段处于低频段,因此高频段实测频谱幅值稍大于仿真幅值的误差并不会影响单轨车辆运行平稳性的评价研究。
4 单轨车辆振动响应特性分析
单轨车辆运行时,其振动响应特性直接影响车辆的运行品质,影响乘客的乘坐体验。研究表明,车速对车辆振动特性具有较大影响[11]。现基于前面建立的单轨车辆空间耦合动力学模型,模拟当车辆分别以15,45,60和75 km/h的速度运行时,获取单轨车辆车体质心处加速度时域历程曲线,其中15,60 km/h的加速度时域历程曲线如图8,9所示。
基于仿真获取的振动响应时程曲线,可评价单轨车辆的运行平稳性和舒适性。目前没有制定适用于单轨车辆平稳性和舒适性的专用指标,因此,运行平稳性评价借鉴铁道车辆动力学性能评定和试验鉴定规范(GB5599—85),舒适性评价采用ISO2631评价标准。
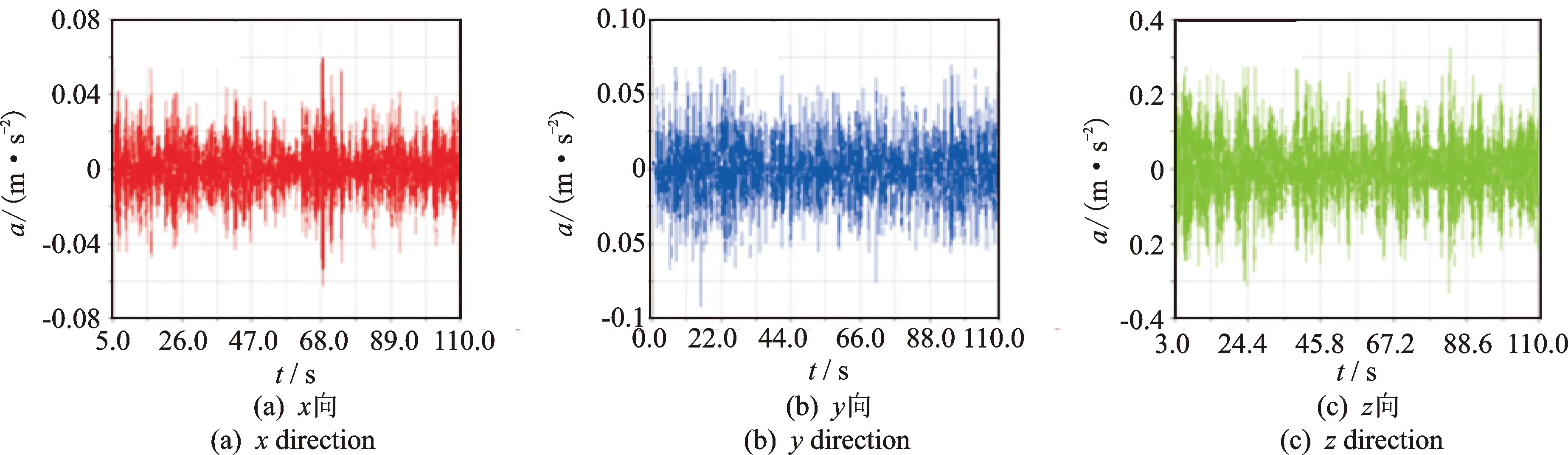
图8 加速度时域历程曲线(15 km/h)Fig.8 The acceleration history curve(15 km/h)
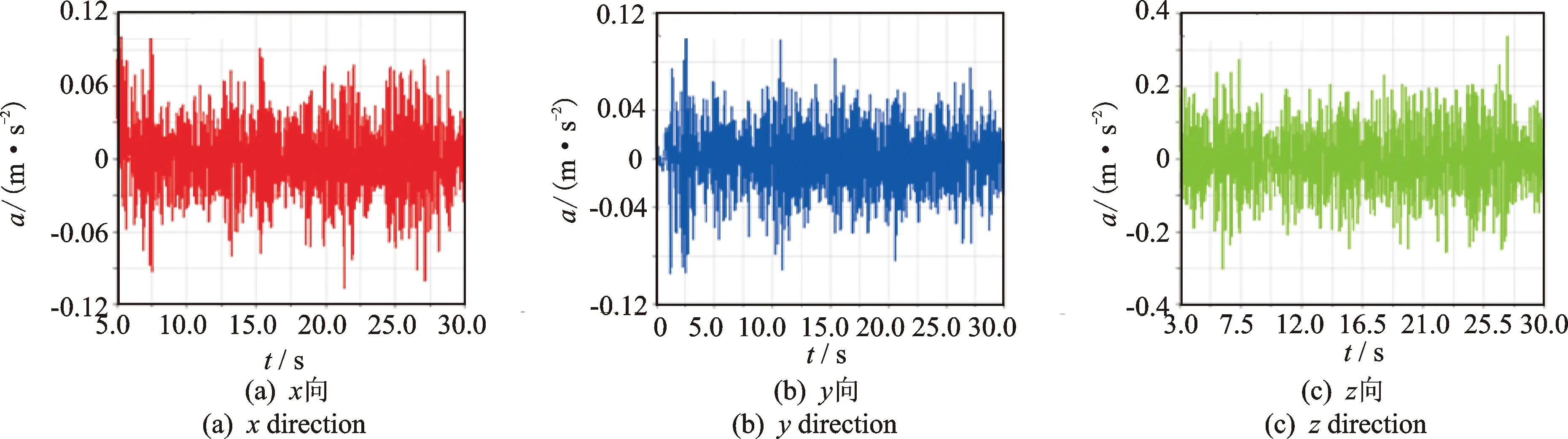
图9 加速度时域历程曲线(60 km/h)Fig.9 The acceleration history curve(60 km/h)
4.1 稳定性能评价分析
平稳性评价方法采用“铁道车辆动力学性能评定和试验鉴定规范” GB5599—85国家标准,其计算方法如下

(10)
其中:W为平稳性指标;A为振动加速度;f为振动频率;F(f)为频率修正系数。
由于车辆振动具有随机性和非周期性变化特点,其加速度和频率都是随时间而变化,且存在多种频率成分,按式(11)对加速度时间历程进行频谱分析,得到每种频率下的平稳性指数Wi,将振动按频率进行分组,再对每一频率成分的加速度值进行统计计算总的平稳性指标。当含有n个频率成分时,总的平稳性指标按式(12)进行计算
按上述标准,计算15 ,45,60和75 km/h速度下单轨车辆平稳性指标,如表2所示。
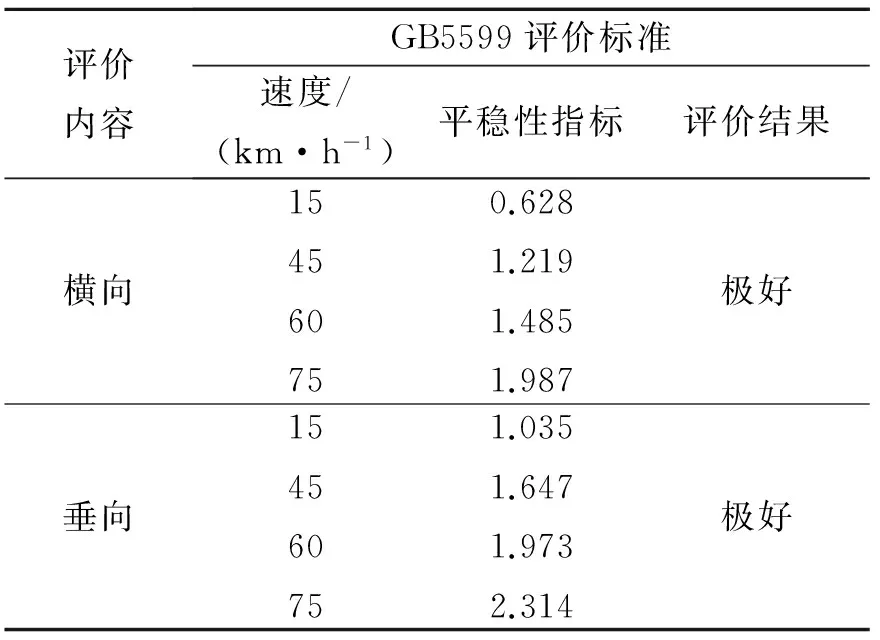
表2 平稳性评价结果
从表2中可看出,平稳性指标W均小于2.5,处于优级范围,可评定为优级。
4.2 舒适性能评价分析
对仿真试验获取的加速度时域历程a(t)进行频谱分析可得功率谱密度函数Ga(f),然后按照式(13)计算加速度均方根值
(13)
当有多点多轴向输入时,可计算出各轴向加权加速度均方根值,再计算总加权加速度均方根值

(14)
按照上述标准计算4种速度下,单轨车辆质心处加权加速度均方根值如表3所示。根据表3可知,各速度下加速度均方根值均小于舒适度临界值0.315 m/s2,乘员不会感觉不适。

表3 舒适性评价结果
5 结 论
1) 建立了单轨车辆走行轮与轨道梁顶部,导向轮、稳定轮与轨道梁侧部三向附着接触的空间耦合动力学模型。
2) 根据离散傅里叶逆变换方法,模拟了跨座式单轨轨道梁顶部、左侧和右侧轨道面空间虚拟不平度激励。
3) 通过实测单轨车辆加速度与模型仿真分析加速度幅频特性对比分析,实测与仿真数据在幅值和频域分布上具有较好的一致性,验证了三向附着接触的单轨车辆空间耦合动力学模型的正确性。
4) 基于三向附着接触的空间耦合动力学模型,分析了单轨车辆的平稳性和舒适性。结果表明,跨座式单轨车辆舒适性良好,平稳性处于优秀等级。
[1] 马继兵,蒲黔辉,霍学晋. 跨座式单轨交通PC轨道梁车桥耦合振动分析[J].西南交通大学学报:自然科学版,2009,44(6):806-811.
Ma Jibing, Pu Qianhui,Huo Xuejin. Vehicle-bridge coupling vibration analysis of PC rail beam of straddle-type monorail transportation[J].Journal of Southwest Jiaotong University: Natural Science Edition,2009,44(6):806-811.(in Chinese)
[2] 刘羽宇, 葛玉梅, 杨翊仁.跨座式单轨列车与轨道梁系统的动力响应分析[J].中国铁道科学,2010,31(5):21-27.
Liu Yuyu, Ge Yumei, Yang Yiren. The dynamic response analysis of the coupled system of the straddle type monorail train and the track beam[J].China Railway Science,2010,31(5):21-27.(in Chinese)
[3] Kenjiro G, Takaomi N. Motomi H, et al. A curving simulation for a monorail car[C]∥11th Mini Conference on Vehicle System Dynamics Identification and Anomalies. Budapest: Technical University of Budapest, 2008:15-17.
[4] Lee C H, Kawatani M, Kim C W. Dynamic response of a monorail steel bridge under a moving train[J].Journal of Sound and Vibration,2006,29(4):562-579.
[5] Diana G,Cheli F. Dynamic interaction of railway systems with large bridge[J].Vehicle System Dynamics ,1992,18(2):100-106.
[6] Yau J D,Yang Y B, Kuo S R. Impact response of high speed rail bridges and riding comfort of rail cars [J]. Engineering Structure,2000,21(1):836-844.
[7] 杜峰,葛晓成,陈翔,等.路面功率谱密度换算及不平度建模理论研究[J] .振动、测试与诊断,2015,35(5):981-986.
Du Feng,Ge Xiaocheng,Chen Xiang,et al. Conversion of spatial power spectral density and study on road irregularity modeling theory[J]. Journal of Vibration, Measurement & Diagnosis,2015,35(5):981-986.(in Chinese)
[8] Lei X ,Noda N A.Analyses of dynamic response of vehicle and track coupling system with random irregularity of track vertical profile[J].Journal of Sound and Vibration,2002,258(1):147-155.
[9] Ju S H,Lin H T. Numerical investigation of a steel arch bridge and interaction with high-speed trains[J]. Engineering Structure,2003,25(6):241-250.
[10] Kawatani M, Kim C W. Computer simulation for dynamic wheel loads of heavy vehicles[J]. Journal of Structure Engineering and Mechanics,2001,12(6) :409-416.
[11] 郑国琛,祁皑,颜学渊.考虑车轨垂向耦合福州地铁振源加速度研究[J]. 振动、测试与诊断,2015,35(2):328-333.
Zheng Guochen,Qi Ai,Yan Xueyuan. Research on acceleration of vibration source from Fuzhou metro considering vehicle-track vertical coupled model of vibration[J]. Journal of Vibration, Measurement & Diagnosis,2015,35(2):328-333. (in Chinese)

10.16450/j.cnki.issn.1004-6801.2017.03.007
国家自然科学基金资助项目(51475062,51305472); 重庆市基础与前沿研究资助项目(cstc2014jcyjA60006)
2015-12-20;
2016-03-14
TH113.1; U216.3; TB124.3
文孝霞,女,1977年10月生,博士生、副教授。主要研究方向为城市轨道车辆系统动力学。曾发表《曲线工况下跨座式单轨走行轮侧偏刚度对轮胎磨损的影响(《交通运输工程学报》 2014 年第2期)等论文。 E-mail:wenxiaoxia150@163.com
猜你喜欢
计算机与生活(2022年1期)2022-01-18
农业知识(2021年19期)2021-10-16
南京理工大学学报(2021年4期)2021-09-15
湖南工业大学学报(2020年6期)2020-11-27
科技与创新(2020年19期)2020-10-09
铁道建筑(2020年9期)2020-09-27
现代商贸工业(2020年24期)2020-07-17
铁道运营技术(2020年2期)2020-04-08
电子技术与软件工程(2018年6期)2018-02-23
青岛画报(2017年12期)2018-02-06
