
一种动中通地面跟踪系统的FPGA实现*
2017-06-23 09:22蒋留兵
电讯技术 2017年6期
蒋留兵
(1.广西无线宽带通信与信号处理重点实验室(桂林电子科技大学),广西 桂林 541004;2.桂林电子科技大学 a.计算机与信息安全学院;b.信息与通信学院,广西 桂林 541004)
一种动中通地面跟踪系统的FPGA实现*
蒋留兵**
(1.广西无线宽带通信与信号处理重点实验室(桂林电子科技大学),广西 桂林 541004;2.桂林电子科技大学 a.计算机与信息安全学院;b.信息与通信学院,广西 桂林 541004)
针对动中通系统在跟踪状态下可能失去空中目标、纯机械扫描系统搜索速度慢等问题,设计了一种基于现场可编程门阵列(FPGA)的新型动中通地面系统。系统天线接收的信号经射频处理输入数字信号处理器,运算得到相关信息,以判断目标方位。上位机控制整个系统的工作状态,有良好的人机交互,系统可在失去空中目标后快速搜索或跟踪。水平方向上由直流电机驱动天线阵对360°方位扫描覆盖,俯仰方向上采用不同角度的波束切换,在短时间内依据能量准则定位空中目标方位,提高了动中通系统的运行效率。
动中通;地面跟踪系统;能量准则;波束切换;方位跟踪
1 引 言
由于动中通系统优于其他通信系统,保证发送方或接收方在快速运动当中仍能与目标保持通信链路畅通、高质量地进行通信,因此,在各种移动载体(如汽车、飞机、轮船)上均广泛使用[1],尤其是在战场环境、抢险救援过程中发挥着极其重要的作用。
地面设备启动后首先要搜索空中设备,确定空中目标的位置。若能快速、准确地确定空中目标的方位,将使其与空中设备的通信效率大大提高。空中目标在不停地移动,完成搜索后,地面设备还要通过不断调整天线的方向使之始终对准空中目标,以保持最佳通信状态,即跟踪空中设备。但由于动中通系统的地面载体处于不断运动过程中,空中的目标也不断运动,两者的运动使地面设备的天线在搜索时可能找不到空中平台,甚至在跟踪状态下,地面天线也可能偏离,失去空中目标。总之,动中通地面设备工作时,不可能一直处于跟踪状态。地面设备关机、目标丢失等因素都需要重新进行搜索、重新获取目标,这是动中通系统当前要解决的主要问题。
针对这些问题,文献[2]设计了一种相控阵天线,可以在水平方向完成360°搜索,俯仰也可以实现80°覆盖,但是其工作模式复杂,造价昂贵,在实际应用中难以实现效益最大化。为了弥补相控阵天线覆盖范围不足的缺陷,文献[3]提出了相控阵+伺服辅助方式完成了天线跟踪算法和原理样机设计和实现,提高了通信链路信噪比。但是当系统对目标进行搜索时,俯仰、水平依然属于机械扫描方式,无法在系统失去目标后快速搜索到目标。
本文在分析动中通跟踪问题的基础上,将系统模块化,首先通过软件调试,然后对分模块进行硬件测试,最后连接各个模块进行系统联调实现系统的搜索、跟踪功能,实现发射、搜索、跟踪3个状态的快速切换。
2 跟踪系统设计
2.1 系统硬件组成
系统包括天线阵、射频处理模块、直流电机、模数转换模块和数字信号处理器,上位机连接数字信号处理器,数字信号处理器根据上位机指令控制整个系统工作。天线阵包括4×2的天线阵列平面,该平面安装于天线座上,与水平面成45°角。天线阵列中,左侧上下分布的4单元天线通过巴特勒矩阵的相移技术[4]可从水平面的0°到竖直面的90°形成4个波束,每个波束覆盖俯仰方向的22.5°,图1是俯仰波束指向图。同理,右侧(R)4单元可形成与左侧(L)对称的4个波束,因此共分布4对波束。切换4对波束,可实现俯仰90°内的全覆盖。
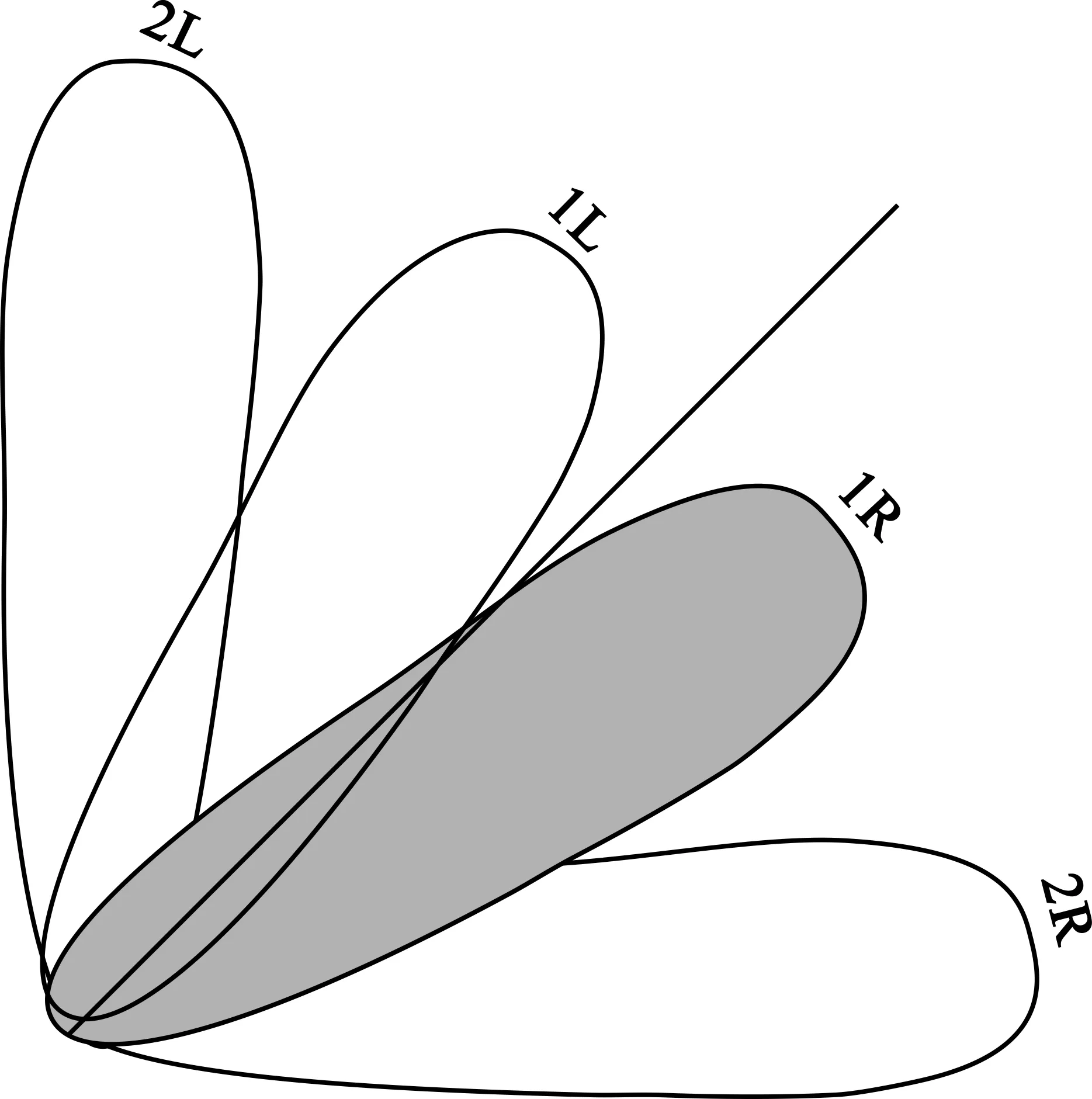
图1 俯仰波束指向图
天线座的转动轴与水平面垂直,直流电机连接驱动天线座的转动轴转动。直流电机控制天线阵转动一周即实现天线单元波束水平方向360°方位角全覆盖。图2为系统结构意图。
射频处理模块的8个微波开关通过控制巴特勒矩阵使天线阵形成俯仰方向上的一对波束。数字信号处理器通过RS232串口与直流电机连接,控制其转动,从而控制天线阵的水平方位角。
数字信号处理器通过8路输入/输出接口与射频处理模块连接,发送指令控制天线微波开关,每次导通一对俯仰角度相同的波束对应的微波开关,形成一对波束发射或接收射频信号,接收的射频信号送入射频处理模块,射频处理模块的输出端经模数转换模块与数字信号处理器输入端连接。
射频处理模块接收当前导通的天线阵中某对波束的射频信号,对两路信号进行下变频处理,然后进行相减与相加,得到的差路及和路信号经模数转换模块输入数字信号处理器。
数字信号处理器对模数转换模块传送的信号处理,得到俯仰角度相同的一对波束的接收信号的能量和相位差。
2.2 FPGA处理器结构
数字信号处理器一般采用现场可编程门阵列(Field Programmable Gate Array,FPGA)。
数字信号处理器包括中心控制处理模块[5]、波束切换模块、直流电机模块和直接数字控制(Direct Digital Control,DDC)[6]模块。数字信号处理器结构如图3所示。

图3 数字信号处理器结构示意图
中心控制处理模块包括总控子模块、发射子模块、搜索子模块和跟踪子模块。
总控子模块配有RS232串行接口,通过该串行接口与上位机连接,接收上位机指令。总控子模块连接发射子模块、搜索子模块和跟踪子模块,根据上位机指令向相关子模块发送控制命令。
发射子模块、搜索子模块和跟踪子模块连接并控制波束切换模块和直流电机模块。
发射子模块连接波束切换模块和直流电机模块,根据总控子模块传送的上位机发射指令。
搜索子模块连接DDC模块,接收DDC模块得到的当前和路信号模值,据此确定需要形成的俯仰方向上的波束,并发送指令给波束切换模块。
跟踪子模块连接DDC模块,接收DDC模块得到的和路信号模值,确定需要形成的俯仰方向上的波束,并发送指令给波束切换模块;同时接收DDC模块的两路信号的相位差,据此确定目标在水平方向的偏移量。
直流电机模块的输入端连接中心控制模块,接受指令,直流电机模块的输出端连接直流电机。根据指令设置直流电机的转速和角度,或者查询直流电机当前的水平方位角。
波束切换模块的输入端连接中心控制模块,接受指令,波束切换模块模块的输出端连接4对输入/输出接口,每次只能打开一对输入/输出接口或全部关闭。
DDC模块的输入端经模数转换模块连接射频信号处理模块,接收差路及和路信号,对其进行正交下变频低通滤波,得到I、Q两路信号并取模。求得和路信号的模值及两个天线单元信号的相位差,和路信号的模值表示信号强度。DDC模块将和路信号模值送入搜索子模块,将和路信号模值和接收信号相位差送入跟踪子模块。
3 跟踪实现
3.1 依据能量准则实现多波束的切换
假设信号为S1(t),到达波束A和波束B的能量为PA、PB,如图4所示。

图4 确定俯仰角度依据示意图
由于
PA/PB∝(θ-θB)/(θA-θ),
(1)
则信号的方向
θ∝(PAθA+PBθB)/(PA+PB)。
(2)
式中:θA为A波束仰角,θB为B波束仰角。
波束之间的切换[7]依据能量准则[8],如图4中的情况PA>PB,在跟踪时将A波束作为主跟踪波束。为实时监测信号波达方向,需每间隔一段时间,将4个波束依次切换一次,根据信号能量重新确定主跟波束。
3.2 根据相位差实现方位跟踪
系统在跟踪状态通过检测俯仰角度相同的一对波束接收信号的相位差确定目标在水平方向上的偏移,当相位差超过一定数值时,需要控制伺服电机旋转一定角度来修正天线的方位角指向,完成对天线方位角的闭环控制,从而对目标进行跟踪[9]。
俯仰角度相同的一对波束的两路信号经过射频处理模块处理得到两路信号,将两路信号进行求差、求和得到差、和信号:
Ssub=A1cos(ωct+τ1)-A2cos(ωct+τ2),
(3)
Sadd=A1cos(ωct+τ1)+A2cos(ωct+τ2)。
(4)
式中:A1、A2分别为两路信号经射频处理后的振幅,ωc为其角速度,τ1、τ2分别为初相。
模数转换模块分别对差、和信号进行采样,然后将采样所得的数据送入FPGA,对两路信号进行数字下变频,两路正交本振信号为
SI=Acos(ωt),
(5)
SQ=Asin(ωt)。
(6)
将差路、和路采样信号分别与两路正交本振信号混频,得
SsI=Acos(ωt)[A1cos(ωct+τ1)-A2cos(ωct+τ2)],
(7)
SsQ=Asin(ωt)[A1cos(ωct+τ1)-A2cos(ωct+τ2)],
(8)
SaI=Acos(ωt)[A1cos(ωct+τ1)+A2cos(ωct+τ2)],
(9)
SaQ=Asin(ωt)[A1cos(ωct+τ1)+A2cos(ωct+τ2)]。
(10)
将4路信号进行数字低通滤波,得到滤波信号为

(11)

(12)

(13)

(14)
经推算可得出两路信号的相位差

(15)
从而将相位差作为跟踪过程中水平角度偏移的依据对目标进行跟踪。
3.3 系统运行流程
系统开机后处于待机状态,等待上位机的指令。本系统的工作状态为发射状态、搜索状态或跟踪状态,由上位机控制。系统运行流程如图5所示。

图5 系统运行流程
3.3.1 发射状态
当系统处于发射状态,总控子模块接收到发射指令,放弃当前的发射,重新按照接收的发射指令进行发射。若接收到跟踪指令、搜索指令或待机指令,则系统立即进入到对应状态。
总控子模块根据已设定的格式转译发射指令并发送给发射子模块,发射子模块将发射指令中波束号传送给波束切换模块,控制对应的输入/输出接口,以接通对应的微波开关。同时,发射子模块根据发射指令中的转速和角度,将角度、转速控制指令发送到直流电机模块,后者控制直流电机驱动天线阵转动达到所需水平方位角,形成上位机指定的波束并发射信号。
3.3.2 搜索状态
当系统处于搜索状态,总控子模块接收到跟踪指令、发射指令或新的搜索指令、待机指令,则暂存指令,待当前搜索完成,立即执行所保存的指令。当前搜索完成后,若没有保存的指令,系统进入待机状态。
总控子模块接收到搜索指令即启动搜索子模块,搜索子模块根据上位机指令通过直流电机模块设置电机转速,再控制直流电机转动至搜索初始位置,并从搜索初始位置顺时针方向按指定转速转动,在直流电机转动过程中,搜索子模块根据搜索指令控制波束切换模块,波束切换模块令4对输入/输出接口快速轮流切换;直流电机每转动10°,俯仰方向上完成一次4对波束的切换。
搜索状态下,射频处理模块接收的信号经其处理后送入DDC模块,搜索子模块接收DDC模块得到的当前和路信号模值,当信号模值连续100个周期(系统工作时钟的周期,10 MHz)超过模值门限值(实测出现目标时约为模值的85%)认定出现目标(信号中存在噪声,如果信号一过门限就认定出现目标,有可能是噪声误判),立即查询当前直流电机方位角度并保存,且保存俯仰方向上波束的波束号。
当直流电机转动到搜索终点时,搜索子模块比较所保存的信号模值,最大值对应的水平方位角度和波束号即为目标所在位置,并将所得空中目标位置的水平方位角度和波束号发送给总控子模块,总控子模块将搜索结果上传给上位机。
如果总控子模块接收的上位机搜索指令中包含搜索完成后转为跟踪,当搜索完成后总控子模块启动跟踪子模块;否则,系统进入待机状态。
3.3.3 跟踪状态
当系统处于跟踪状态,总控子模块接收到跟踪指令,放弃当前的跟踪,重新按照接收的跟踪指令进行跟踪。若接收到的是发射指令、搜索指令或待机指令,则系统立即进入到对应状态。
总控子模块接收到跟踪指令即启动跟踪子模块,跟踪子模块根据上位机指令通过直流电机模块设置电机转速,再控制直流电机转动至跟踪指令规定的方位角度,跟踪子模块根据跟踪指令控制波束切换模块轮流切换俯仰方向上4对波束,跟踪子模块保存每对波束形成时的信号强度,比较4对波束的数据,并形成信号强度最高的的一对波束,检测此对波束相位差值,当检测到其相位差连续20个周期大于相位差阈值(实测目标水平方向偏移1°时相位差的95%),说明目标已偏离当前的水平方位角,根据相位差的正负确定转动方向,根据相位差的值控制直流电机旋转相应角度,以跟踪目标。
4 测试结果
在实验室环境中对系统搜索目标时间、跟踪性能以及各个工作状态间切换效果进行了测试。天线阵(已安装天线罩)和天线座实体如图6所示,图7为整体测试场景图,表1为搜索角度与给定角度的对比。

图6 天线阵和天线座
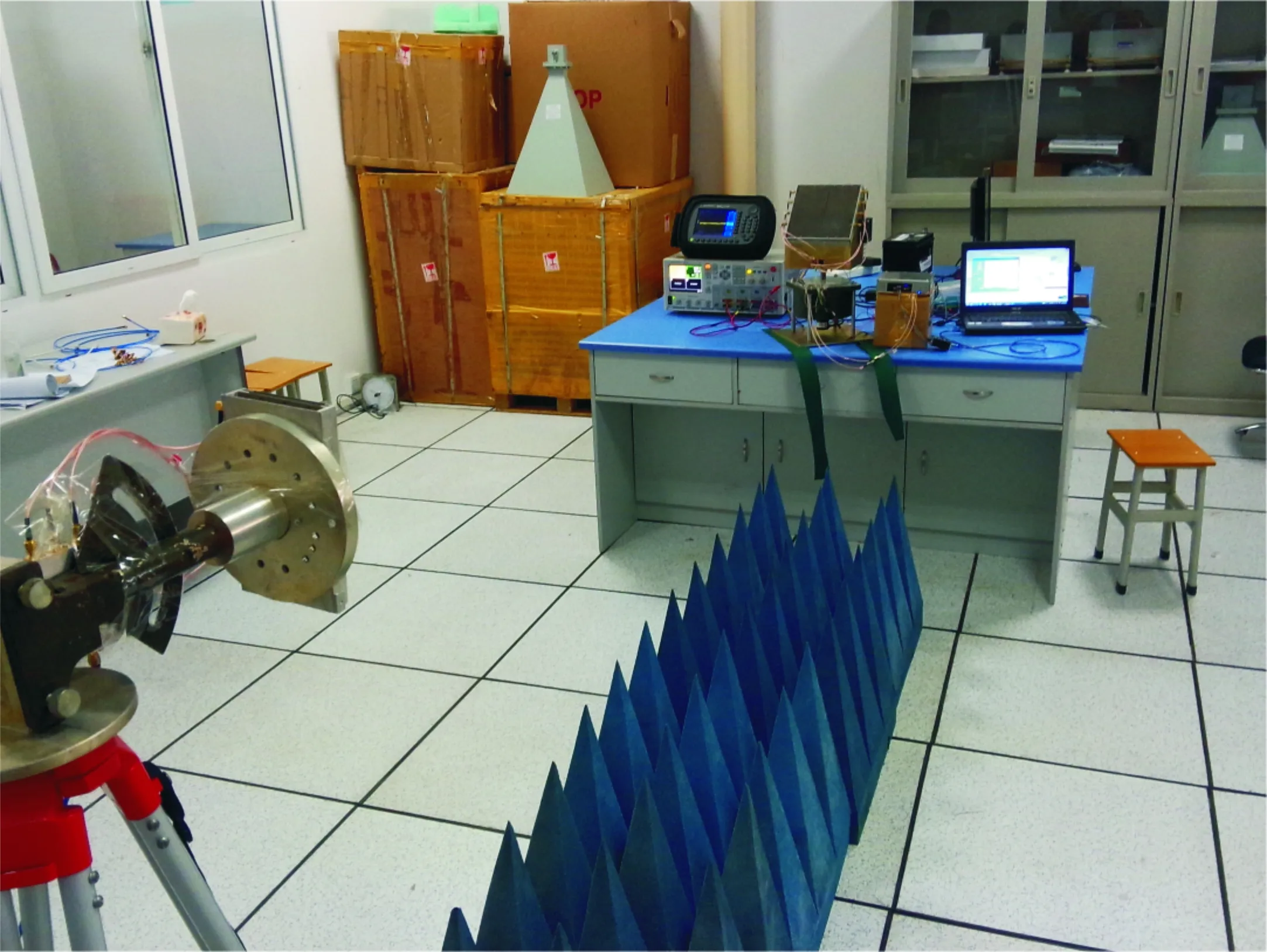
图7 整体测试场景
测试结果表明,系统可在水平方向和俯仰方向准确确定目标方位。测试发现,当方位角位于45°以内时,搜索时间大约需要8 s;方位角位于315°~360°,搜索时间大约需要5 s。在实验室条件下,使天线跟踪目标,性能比较稳定,上位机可通过发送指令灵活地控制系统工作状态。
5 结束语
本文以FPGA为核心,设计了一种搜索跟踪空中目标的动中通地面系统。在系统实现时,为使系统具有高实时性,充分发挥FPGA的并行处理能力,提高系统实时性。在系统软件编程实现方面,也充分考虑软件处理的实时性要求,并兼顾精度要求,对数字下变频、求模等算法的并行实现方法进行了研究。采用上位机对信号处理模块进行控制,通过命令流实现数据流的驱动,根据命令字完成软件模块的重组,实现发射、搜索、跟踪3个工作状态的快速切换和良好的人机交互,具有较好的实用价值。然而,本系统仅在实验室理想环境下实现,今后需要在室外、战场等环境下研究系统的发射、搜索和跟踪性能。
[1] 伍宗伟,姚敏立,蔡国新. 低轮廓动中通极化稳定控制系统分析[J].电子技术应用,2009,21(5):105-108. WU Zongwei,YAO Minli,CAI Guoxin.Analysis of polar-stabilizing control system of sat-com on the move[J].Application of Electronic Technique,2009,21(5):105-108.(in Chinese)
[2] TRIPODI M,DIMARCA F,CADILI T,et al.Ka-band active phased array antenna system for satellite communication on the move terminal[C]//Proceedings of 2012 IEEE First AESS European Conference on Satellite Telecommunications(ESTEL).Genova,Italy:IEEE,2012:1-4.
[3] 蒋文丰. 相控阵结合伺服辅助的车载动中通天线跟踪方法[J].电讯技术,2016,56(3):284-289. JIANG Wenfeng.An antenna tracking method using phased array and servo for vehicle satellite communication on the move[J].Telecommunication Engineering,2016,56(3):284-289.(in Chinese)
[4] 姜兴,蓝雪梅,张凯. 小型化宽带微带缝隙耦合Butler矩阵研制[J].电子元件与材料,2014,33(4):48-51.
JIANG Xing,LAN Xuemei,ZHANG Kai. Development of miniaturized broadband Butler matrix in micro-strip slot couple technology[J].Electronic Components and Materials,2014,33(4):48-51.(in Chinese)
[5] 胡文静,李亚晶,聂琨坤,等. 两颗中继卫星共用测站协同控制研究[J].电讯技术,2016,56(9):1000-1004. HU Wenjing,LI Yajing,NIE Kunkun,et al.Study on joint control of two TDRSS sharing one ground terminal station[J].Telecommunication Engineering,2016,56(9):1000-1004.(in Chinese)
[6] WEN B Y,MA Z G,ZHOU H,et al.DDC design by using FPGA in HF OSMAR system[C]//Proceeding of 2004 Computational Electromagnetics and Its Applications.Wuhan:IEEE,2004:500-503.
[7] CHU T S,HASHEMI H. True-time-delay-based multi-beam arrays[J].IEEE Transactions on Microwave Theory and Techniques,2013,61(8):3072-3082.
[8] 严胜刚,王惠刚,李志舜,等. 信号相位匹配原理的方位估计性能分析[J].西北工业大学学报,2005,23(5):589-592. YAN Shenggang,WANG Huigang,LI Zhishun,et al.Comparison of energy criterion with matrix norm criterion in performance analysis of DOA estimation based on SPMP[J].Journal of Northwestern Polytechnical University,2005,23(5):589-592.(in Chinese)
[9] 韩小妹,李雁斌,黄勇. 分布式全相参雷达相位差闭环跟踪技术[J].制导与引信,2015,36(2):38-43. HAN Xiaomei,LI Yanbin,HUANG Yong. The closed-loop tracking technology of phase difference for distributed aperture coherent radar[J].Guidance and Fuze,2015,36(2):38-43.(in Chinese)
FPGA Implementation of Surface Tracking System fora Satellite Communication on the Move Terminal
JIANG Liubing1,2a,ZHAO Jikui2b,CHE Li1,2a,XIAO Zhitao2b
(1.Guangxi Wireless Broadband Communication and Signal Processing Key Laboratory,Guilin University of Electronic Technology,Guilin 541004,China;a.School of Computer Science and Information Security;b.School of Information and Communication,2.Guilin University of Electronic Technology,Guilin 541004,China)
To solve the problem that mobile satellite communication system may lose spacial targets in the tracking state and the search speed of mechanical scanning system is slow,a new mobile satellite communication system based on field programmable gate array(FPGA) is designed.The signal received by system antenna is sent to the digital signal processor through radio frequency(RF) processing,then the digital signal processor estimates target’s orientation according to related information.The working state of the whole system which has a good man-computer interaction is controlled by the upper computer and system can quickly search or track after losing spacial target.The antenna array is driven by a direct current(DC) motor in the horizontal direction to achieve 360 degree azimuth scanning coverage and beam switching with different angles is used in the pitch direction. The system can locate the spacial target position according to energy criterion in a short time,and the operating efficiency of the satellite communication on the move terminal is improved.
satellite communication on the move terminal;surface tracking system;energy criterion;beam switching;azimuth tracking
10.3969/j.issn.1001-893x.2017.06.018
蒋留兵,赵纪奎,车俐,等.一种动中通地面跟踪系统的FPGA实现[J].电讯技术,2017,57(6):724-729.[JIANG Liubing,ZHAO Jikui,CHE Li,et al.FPGA implementation of surface tracking system for a satellite communication on the move terminal[J].Telecommunication Engineering,2017,57(6):724-729.]
2016-10-13;
2016-12-15 Received date:2016-10-13;Revised date:2016-12-15
国家自然科学基金资助项目(61561010);广西自然科学基金资助项目(2013GXNSFAA019323);广西科学研究与技术开发计划项目(桂科攻14122006-6);广西教育厅科研立项项目(KY2015LX096);广西无线宽带通信与信号处理重点实验室主任基金项目(GXKL061506)
TN927
A
1001-893X(2017)06-0724-06
蒋留兵(1973—),男,江苏泰兴人,2006年获硕士学位,现为研究员,主要研究方向为雷达信号处理;
Email:jlbnj@163.com
赵纪奎(1992—),男,河南台前人,2014年获学士学位,现为硕士研究生,主要研究方向为雷达信号处理;
车 俐(1977—),女,广西桂林人,2012年获硕士学位,现为高级实验师;
肖志涛(1990—),男,湖南安仁人,2014年获学士学位,现为硕士研究生,主要研究方向为雷达信号处理。
**通信作者:jlbnj@163.com Corresponding author:jlbnj@163.com1,2a,赵纪奎2b,车 俐1,2a,肖志涛2b
猜你喜欢
大电机技术(2022年5期)2022-11-17
成都信息工程大学学报(2019年6期)2019-08-13
通信技术(2019年3期)2019-05-31
电子测试(2018年6期)2018-05-09
声学与电子工程(2017年1期)2017-06-22
现代兵器(2017年4期)2017-06-01
电子制作(2017年1期)2017-05-17
淮南师范学院学报(2015年3期)2015-03-22
电机与控制应用(2015年1期)2015-03-01
四川师范大学学报(自然科学版)(2015年4期)2015-02-28
