
四轮独立驱动车辆状态参数的UKF估计*
2017-06-22 14:00唐秋云
武汉理工大学学报(交通科学与工程版) 2017年3期
付 翔 孙 威 黄 斌 唐秋云
(现代汽车零部件技术湖北省重点实验室1) 武汉 430070) (汽车零部件技术湖北省协同创新中心2) 武汉 430070)
四轮独立驱动车辆状态参数的UKF估计*
付 翔1,2)孙 威1,2)黄 斌1,2)唐秋云1,2)
(现代汽车零部件技术湖北省重点实验室1)武汉 430070) (汽车零部件技术湖北省协同创新中心2)武汉 430070)
针对四轮独立驱动电动汽车无从动轮及转矩独立可控等特点,建立了7自由度车辆模型和非线性魔术轮胎模型,采用含加性噪声的无迹卡尔曼滤波(UKF)算法对车辆状态参数进行离线仿真估计,并基于实车平台对所设计的估计算法进行巡航转向工况和蛇形工况道路试验,以GPS测量的纵向车速作为基准值,以陀螺仪等传感器测量的其他状态参数作为测量值,以此来验证算法的有效性.仿真和实车试验结果均表明,所设计的UKF算法估计精度较高,且具有较强的工况适应性.
四轮独立驱动;状态参数估计;无迹卡尔曼滤波;GPS
0 引 言
近年来,随着电动汽车的稳定快速发展,诸如驱动防滑(TCS)、制动防抱死(ABS)、电子稳定性系统(ESP)等电动汽车主动安全性控制技术也越来越受到人们的关注.这些主动安全控制系统旨在提高车辆的驱动和制动稳定性能,以及改善某些特殊工况下的车辆操纵稳定性能,从而降低车辆发生侧滑、碰撞等危险[1-2].然而,进行这一系列车辆动力学性能控制所必需的车辆纵向车速、横摆角速度等状态信息并不能以有效的方式去测量获得[3].现有的ABS,ESP等产品虽已广泛应用,但生产厂商基于商业技术保密的原因不予公开相关车辆状态参数的估计模型及算法,因此,车速估计算法等相关问题引起了国内外学者的广泛研究,文献[4]基于3自由度车辆模型,采用无迹卡尔曼滤波算法对车速进行了仿真估计,文献[5]提出使用容积卡尔曼滤波对汽车状态进行了仿真估计,文献[6]利用多信息源融合技术,提出了无迹卡尔曼滤波状态参数联合观测方法,文献[7]基于3自由度车辆模型和HSRI轮胎模型,采用无迹卡尔曼滤波算法对四轮独立驱动车辆的车速进行了初步仿真估计.目前,车辆动力学状态估计领域的研究主要集中在卡尔曼滤波理论的应用,在多传感器数据融合问题上,卡尔曼滤波是最强大的工具.由于汽车是一个强非线性复杂系统,针对线性系统研究的卡尔曼滤波已不满足使用条件,由此衍生出了用来处理非线性系统的扩展卡尔曼滤波(EKF)和无迹卡尔曼滤波(UKF),但是UKF无需像EKF那样计算繁琐的Jacobean矩阵,无需忽略高阶项,且计算精度较高,从而得到广泛的应用[8-9].
本文的研究对象是四轮独立驱动电动汽车,针对其无从动轮及车轮转矩独立可控可测的特点[10],在Matlab/simulink环境下建立了7自由度车辆模型和考虑回正力矩的魔术轮胎模型.一般地,传感器等测量设备本身所产生的噪声类型是加性噪声,不管有没有信号,其噪声均是存在的,为提高算法实时性[11],结合UKF精度较高的特点,文章设计了含加性噪声的UKF估计算法,对测量信号进行滤波处理并作进一步的估计,对车辆驱动工况下的状态参数估计模型进行离线仿真和实车道路试验,以此来验证算法的有效性.
1 非线性7自由度车辆动力学模型
1.1 车辆模型
估计算法的准确性离不开一个合适的参考车辆模型,基于本文所研究的问题,考虑到算法的估计精度及后续进行实车试验的实时性,不考虑车身的侧倾、俯仰自由度,并假设车辆在水平面运动,建立了非线性7自由度车辆动力学模型,该模型具有车辆纵向、侧向和横摆3个运动自由度,以及4个独立车轮的转动自由度,见图1.
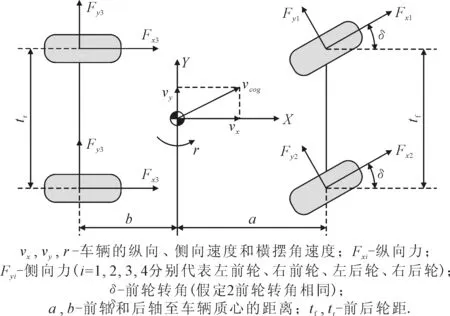
图1 车辆模型
根据牛顿力学可建立车辆动力学平衡方程为
(1)
(2)
(3)

Fx4-(Fy1+Fy2)sinδ-Fw]
(4)
(5)
(Fy1+Fy2)cosδ+Fy3+Fy4]
(6)
Mz=a[(Fx1+Fx2)sinδ+(Fy1+Fy2)cosδ]-


M1+M2+M3+M4
(7)
式中:m为整车质量;CD为空气阻力系数;A为车辆纵向迎风面积;Mi为各车轮回正力矩.
1.2 车轮旋转动力学模型
本文的研究对象是四轮独立驱动汽车,每个车轮上的电机直接给各车轮提供驱动转矩,从而为车辆的行驶提供动力,当车辆行驶时,根据力矩平衡原理可得
(8)
式中:ωi为各车轮旋转角速度;Ji为各车轮的转动惯量;Tdi为各车轮驱动力矩;Fxi为各车轮与地面之间的纵向力;Rei为车轮滚动半径.
考虑车辆因纵、侧向加速度引起的轮荷转移,各车轮垂向力表达式为

(9)
(10)

(11)
(12)
式中:H为车辆质心高度;L为前后轴距,L=a+b.
1.3 轮胎模型
轮胎作为车辆与地面惟一传输动力的桥梁,其精确性对于整车仿真来说尤为重要.文中选取应用最为广泛的“magic formula”魔术轮胎模型,其用一套相同的式子即可表达轮胎的纵、侧向及回正力矩,相比绝大多数状态参数估计文献中使用的Dugoff轮胎模型及统一轮胎模型,魔术轮胎模型因其考虑更多的非线性影响参数而具有更高的精度.其表达式为
y=Dsin [Carctan {Bx-E(Bx-arctan(Bx))}]
(13)
Y(X)=y(x)+Sv
(14)
x=X+Sh
(15)
式中:特性参数B为刚度因子;C为曲线形状因子;D为峰值因子;E为曲线曲率因子;Sh为曲线在水平方向上的偏移;Sv为曲线在垂直方向上的偏移;当输入变量X为纵向滑转率时,对应的输出Y为轮胎纵向力,当输入变量X为轮胎侧偏角时,输出Y为侧向力或回正力矩.各特性参数可通过实车试验数据拟合得到.
2 车辆状态参数UKF估计器设计
对于一般的非线性系统,其状态估计模型为

(16)
式中:w(t),v(t)别为符合高斯分布的过程噪声和测量噪声.
假定路面附着系数已知,以车辆纵向车速、侧向车速、横摆角速度和各轮转速作为系统的状态变量,定义x=(vx,vy,r,ωi)T;以车辆纵向加速度、侧向加速度、横摆角速度和各轮轮速作为系统的观测变量,定义z=(ax,ay,r,ωi)T;以前轮转角和各轮纵、侧向力为系统的控制输入变量,即u=(δ,Fxi,Fyi)T.文中采用含加性噪声的UKF估计算法,对于不同的采样时刻k,对式(16)离散化可得

(17)
式中:xk为k时刻的状态矢量;yk为k时刻的输出矢量;uk为输入矢量.设w(k)的协方差矩阵为Q,v(k)的协方差矩阵为R,状态变量x在不同时刻k的无迹卡尔曼估计算法的基本实现步骤如下:
步骤1 UT变换,UT(unscented transform)变换是UKF估计算法的基础和核心部分,其对非线性函数的概率密度分布进行近似,用一系列确定样本来逼近状态的后验概率密度,而不是对非线性函数进行近似.对于n维状态变量(本文n=7),根据其均值(x和方差P,可以通过如下变换得到2n+1个Sigma点x和相应的权值w来计算z的统计特征.
计算2n+1个Sigma采样点,并计算这些采样点相应的权值
式中:下标m为均值,c为协方差;λ为缩放比例参数(λ=α2(n+κ)-n),用来降低系统总的预测误差;α的选取控制了采样点的分布状态,通常选取较小的正值((10-4≤α≤1),文中取α=0.001;κ取0和3-n中的较大者;β是一个非负的权系数,它可以合并高阶项的动态误差,对于服从高斯分布的状态变量,β=2是最优的.
步骤2 初始化,并利用式(18)~(19)可得一组Sigma采样点及其对应的权值.
(20)
(21)


(22)
步骤3 根据2n+1个Sigma采样点计算均值和方差预测.
(23)
(25)
步骤4 将Sigma点集带入观测方程,得到预测的观测量.
(26)
步骤5 根据步骤4得到的观测预测值,通过加权求和得到系统预测的均值及协方差.
(28)
(29)
步骤6 计算Kalman增益矩阵.
(30)
步骤7 计算系统的状态更新和协方差更新.
(31)
(32)
3 仿真验证
根据7自由度车辆模型,在Matlab/simulink环境下搭建仿真模型,为验证所设计的估计算法的准确性,进行了如下工况的离线仿真.
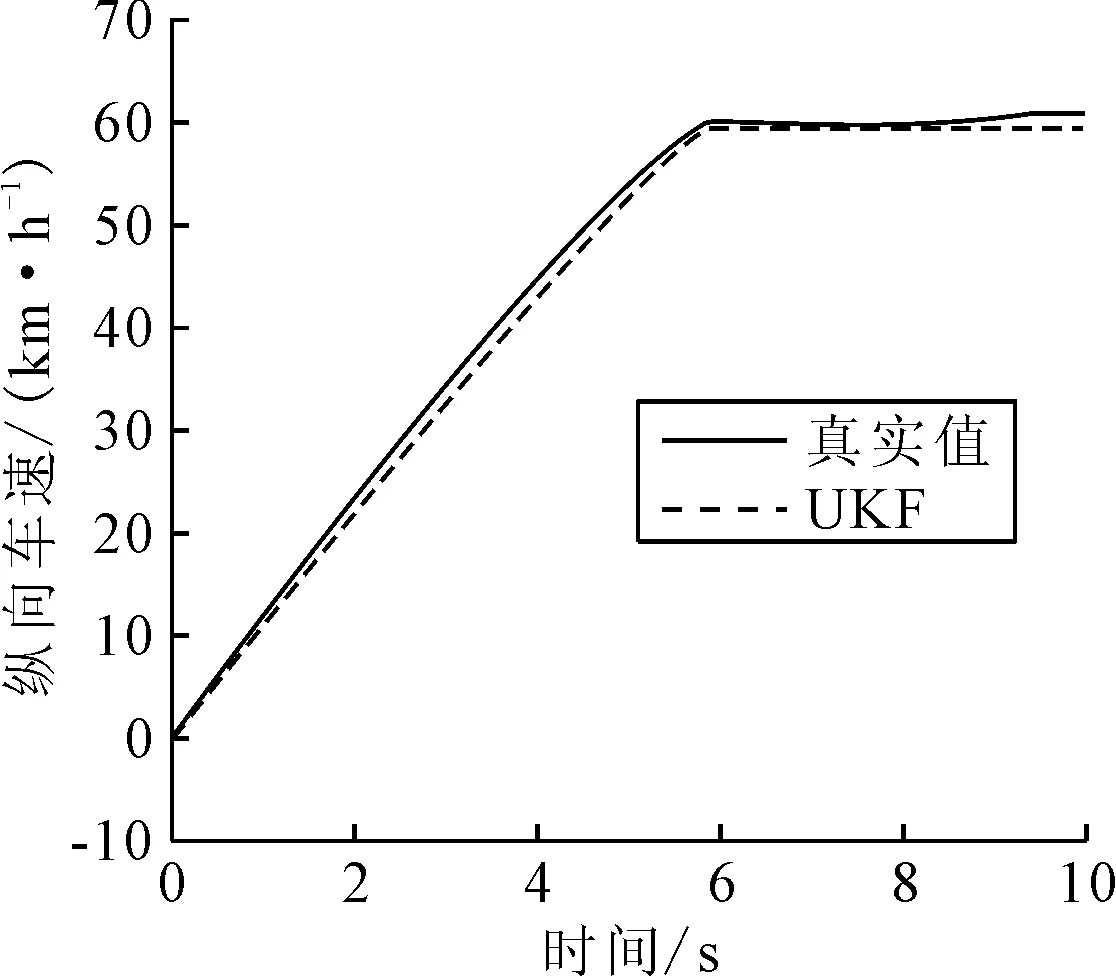
图2 纵向车速真实值与估计值
工况一 转向盘转角输入为0°,起始车速为0 km/h,目标车速60 km/h,进行驱动工况仿真,仿真步长为1 ms,结果见图2.假定模型的仿真值为真实值,由图2可见,算法估计值与模型的真实值趋势一致,估计效果较好,同时车辆的纵向车速能够在6 s内达到目标车速,这也验证了所搭建的模型的合理性与准确性.
工况二 车辆保持匀速行驶,初始车速60 km/h,第2 s给转向盘转角阶跃输入,仿真结果见图3~5.由图3~5可知,纵向车速估计值能够很好的跟随真实值,第2 s角阶跃输入后,横摆角速度和侧向速度响应迅速,UKF估计器均能够取得较好的跟踪,只有在峰值处有略微误差.

图3 转向盘转角阶跃输入曲线
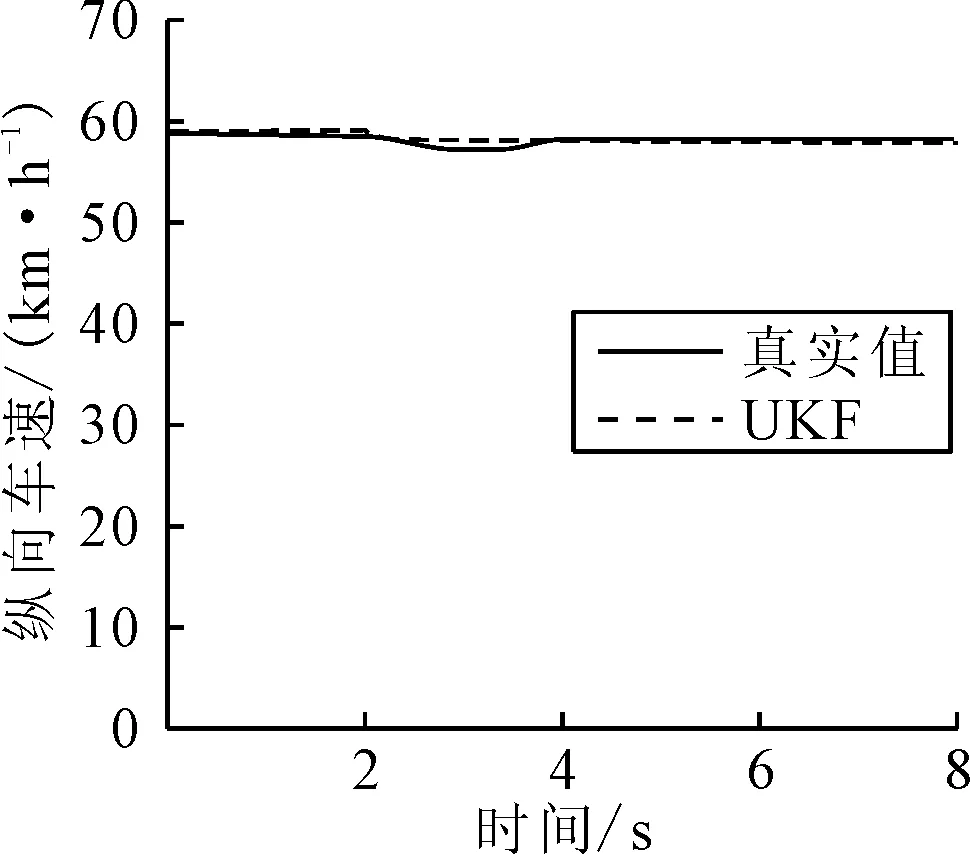
图4 纵向车速真实值与估计值
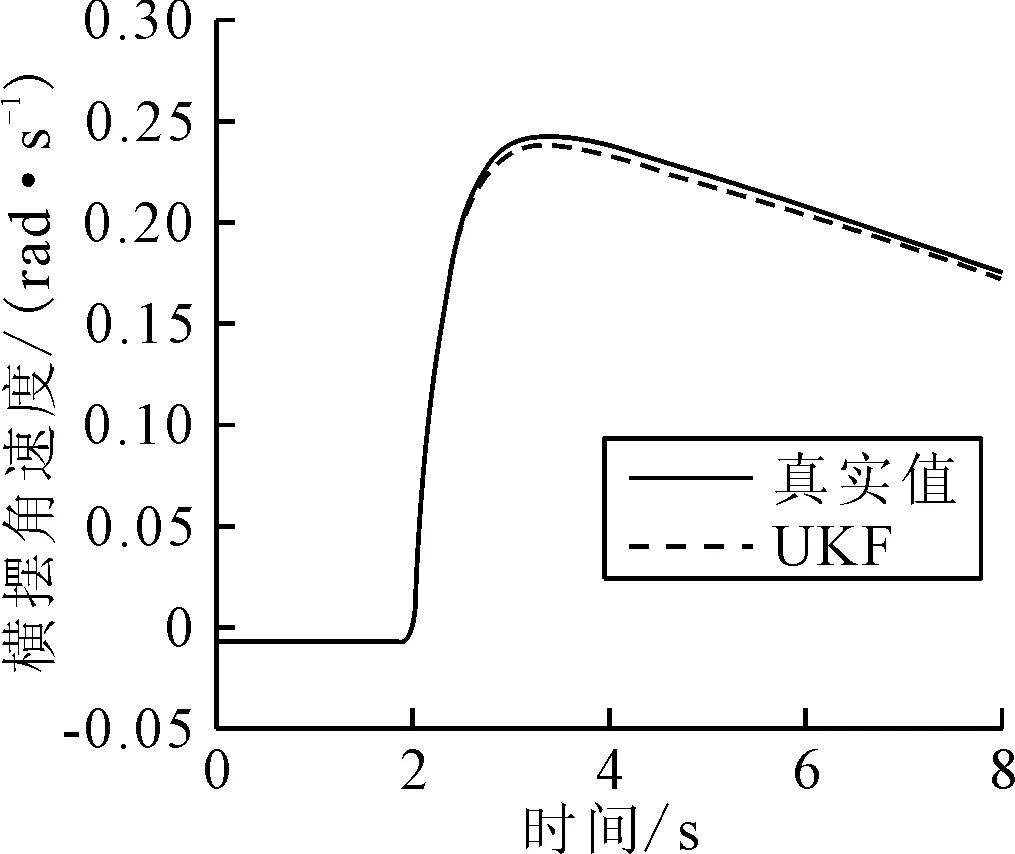
图5 横摆角速度真实值与估计值
4 实车试验
虽然估计算法的离线仿真效果较好,但是实际车辆是一个非常庞大复杂的系统,为进一步验证所设计的估计算法的准确性及实时性,文中基于实车平台进行了道路试验.试验所用到的仪器设备包括方向盘转角传感器、加速/制动踏板角度传感器、轮速传感器、GPS信号接收器、三轴陀螺仪、dspace系统和上位机.图6为部分设备的安装实物.试验过程中,驾驶员根据实际情况操纵车辆,方向盘转角和踏板开度等信号通过I/O接口经dspace的D/A模块传递到上位机,与已建立的Matlab/simulink估计器模型结合,通过dspace实时接口模块(RTI),并利用Matlab实时工作空间(RTW)将模型转化成C代码,下载到dspace虚拟控制器中.同样的,轮速传感器和陀螺仪将车辆的实际轮速及加速度等数据通过I/O接口经dspace的D/A模块传递到上位机,通过上位机软件controldesk进行数据采集及监控,从而保证了实时性.其中,GPS测量的车速精度可达0.03 m/s,其为汽车状态参数的测量及估计提供了可靠的依据[12-13],文中以GPS测量值用作算法的标称车速.根据已有的试验设备及试验道路条件,进行巡航转向工况和蛇形工况道路试验.
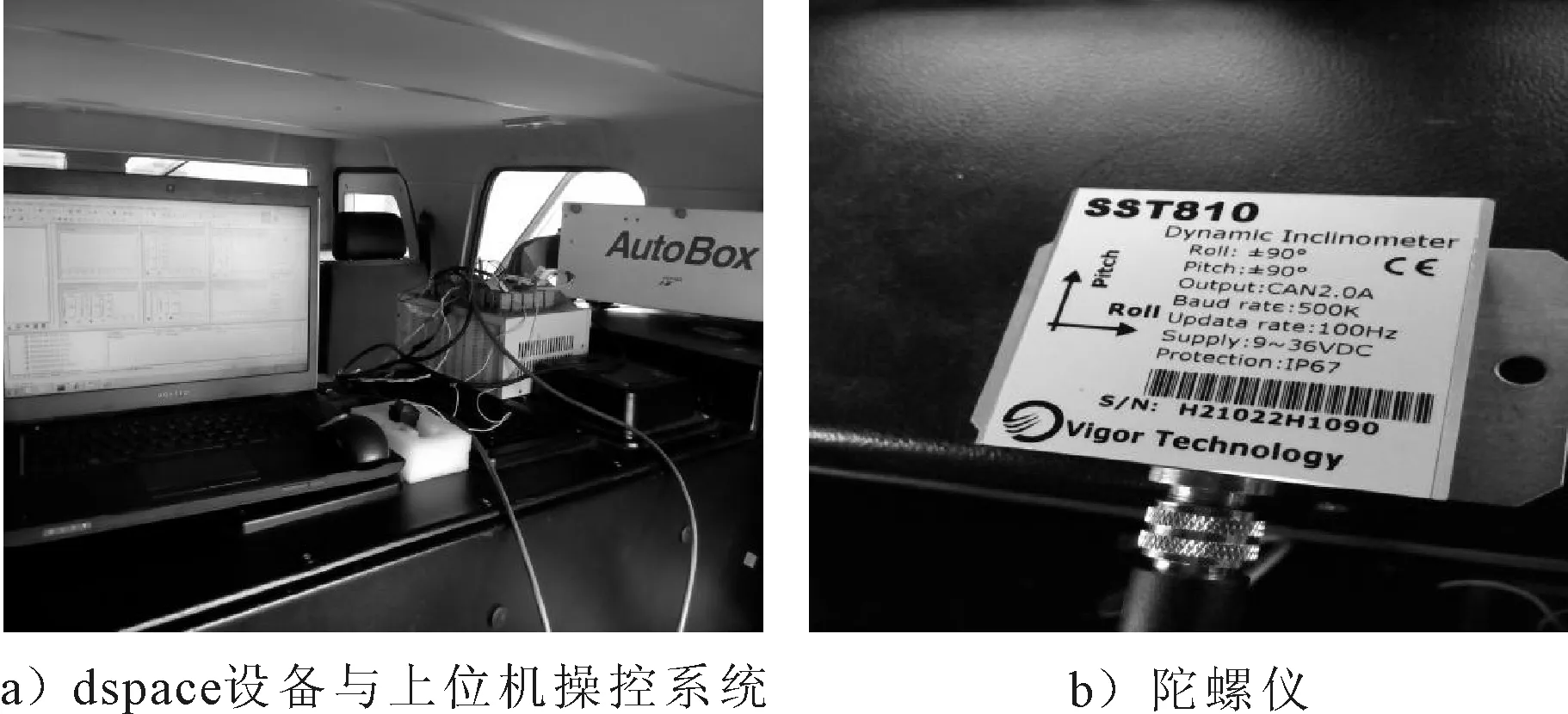
图6 实车安装的部分设备
4.1 巡航转向试验
在水平良好的水泥路面上,进行转弯半径为30 m的巡航转向试验.驾驶员操作加速踏板,待车速达到15 km/h时稳住加速踏板及转向盘,随后又连续进行了20 km/h和30 km/h的巡航转向试验,根据GPS和传感器等设备记录行驶状态及数据信息,部分状态信息见图7.从图7可知,UKF估计算法能够很好的跟随GPS测量的纵向车速,只是在每段巡航车速的起始点处有波动;而对于横摆角速度及侧向加速度,由于传感器自身存在噪声,实际测量得到的结果波动很大,但所设计的UKF算法能够有效地对传感器的噪声进行滤波处理,且估计误差能够保持在4%以内.
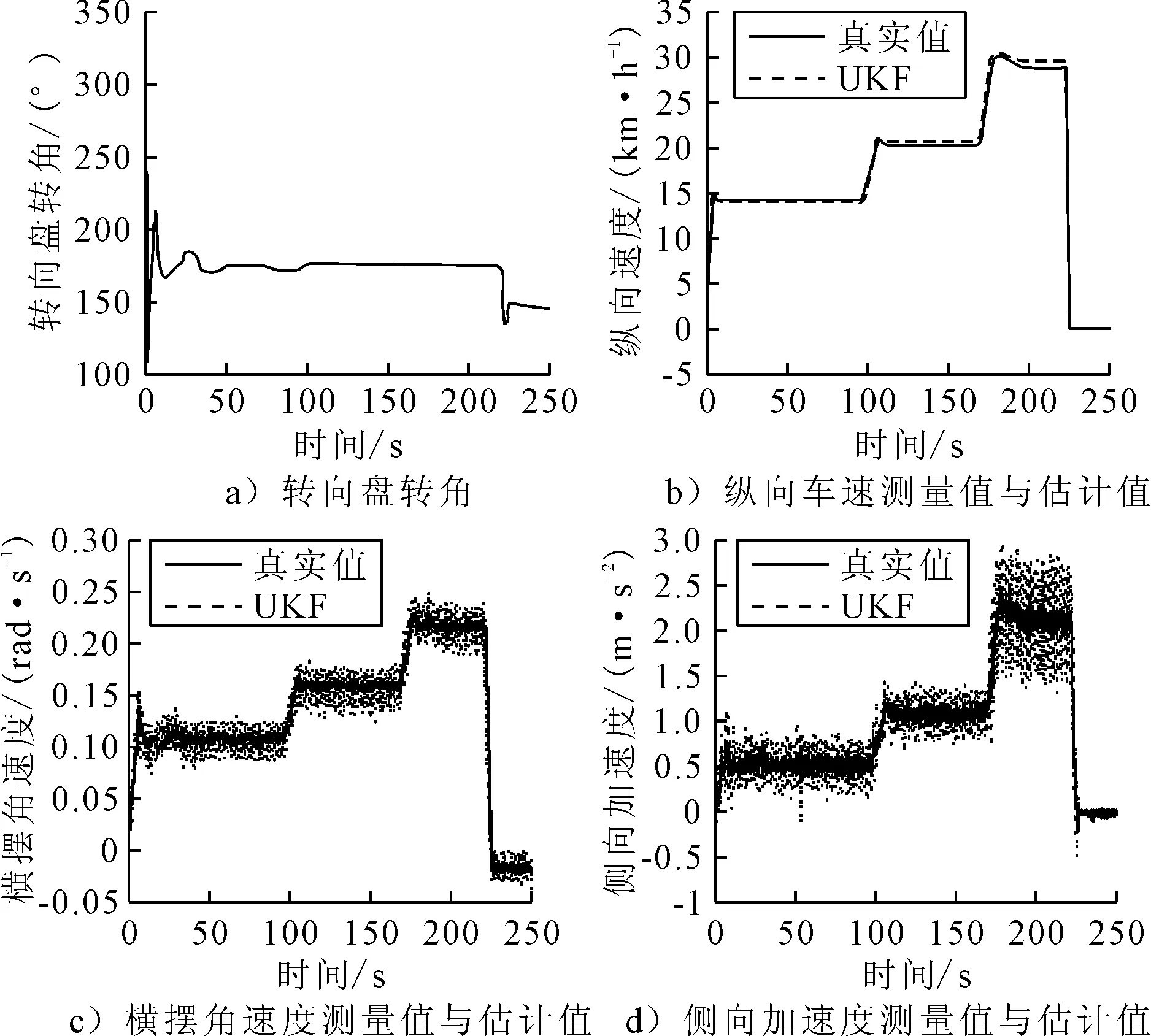
图7 巡航转向工况
4.2 蛇形试验
试验依据GB/T 6323.1-1994进行,试验场地为干燥、平坦清洁的水泥混凝土路面,选择综合性能路直线车道进行试验.试验开始,驾驶员操作方向盘及加速踏板,待车速达到50 km/h时稳住加速踏板,使车辆以50 km/h的稳定速度通过蛇形试验路段.根据GPS和传感器等设备记录测量变量的时间历程曲线见图8.从试验结果来看,纵向车速及侧向加速度的估计取得了不错的效果,而随着绕桩数量的增加,横摆角速度有逐渐增大的趋势,在横摆角速度峰值处附近,UKF估计算法有一定偏差,但综合整体效果及误差来说,估计算法还是令人满意的.
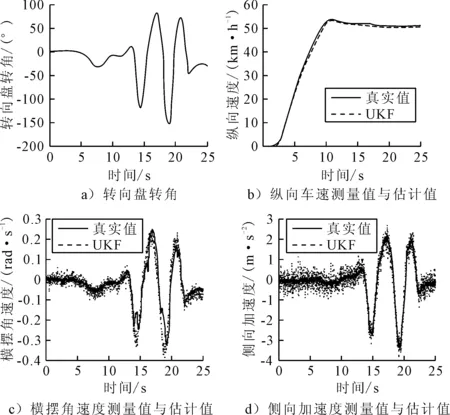
图8 蛇形工况
5 结 论
1) 针对四轮独立驱动车辆的特点,建立了7自由度车辆模型,结合所设计的高精度的UKF估计算法,对车辆状态参数进行离线仿真,仿真结果表明,所设计的估计器能够很好的估计车辆的状态变化,且精度较高.
2) 轮胎力模型是设计估计算法的重要基础,文章采用非线性魔术轮胎模型,针对不同工况拟合得到轮胎特性参数,从而能够准确的估计各轮胎纵、侧向力和回正力矩.
3) 根据实车平台进行巡航转向和蛇形等道路试验,以GPS测量车速作为估计算法的标称车速,并结合其他传感器来估计车辆的运动状态参数.试验结果验证了参数估计算法的有效性及对于不同试验工况具有一定的适应性.
下一步,结合已有的实车平台及已经得到验证的UKF估计算法,进行驱动防滑控制算法仿真及试验,以此来验证加入控制的算法的效果.
[1]JIANG F, GAO Z. An adaptive nonlinear filter approach to the vehicle velocity estimation for ABS[C]. IEEE International Conference on Control Applications,2000(2):490-495.
[2]ANDERS L, CLAES TL, MARIA K, et al. The effectiveness of electronic stability control (ESC) in reducing real life crashes and injuries[J]. Traffic Injury Prevention,2005,24(6):631-641.
[3]ANTONOV S, FEHN A, KUGI A. Unscented kalman filter for vehicle state estimation[J]. Vehicle System Dynamics,2011,49(9):1497-1520.
[4]赵万忠,张寒,王春燕.基于无迹卡尔曼滤波的汽车状态参数估计[J].华南理工大学学报(自然科学版),2016,44(3):76-80.
[5]XIN X, CHEN J, ZOU J. Vehicle state estimation using cubature kalman filter[C]. IEEE, International Conference on Computational Science and Engineering,2014(1):44-48.
[6]褚文博,李深,江青云,等.基于多信息融合的全轮独立电驱动车辆车速估计[J].汽车工程,2011,33(11):962-966.
[7]宗新怡,李刚,邓伟文.四轮独立驱动电动汽车车速估计研究[J].机械设计与制造,2013(9):83-85.
[8]KOLÅS S, B.A. FOSS, SCHEI T S. Constrained nonlinear state estimation based on the UKF approach[J]. Computers & Chemical Engineering,2009,33(8):1386-1401.
[9]黄小平,王岩.卡尔曼滤波原理及应用:MATLAB仿真[M].北京:电子工业出版社,2015.
[10]HORI Y. Future vehicle driven by electricity and control-research on four wheel motored UOT electric march II[J]. IEEE Transactions on Industrial Electronics,2002,51(5):1-14.
[11]刘也,余安喜,朱炬波,等.加性噪声条件下的UKF算法[J].中国科学:技术科学,2010(11):1286-1299.
[12]邓利.基于GPS的汽车稳定性控制研究[D].南京:南京航空航天大学,2009.
[13]DAVID M, BEVLY J, CHRISTIAN G, et al. The use of GPS based velocity measurements for measurement of sideslip and wheel slip[J]. Vehicle System Dynamics,2003,38:127-147.
UKF Estimation of State Parameters of Four Wheel Independent Drive Vehicle
FU Xiang1,2)SUN Wei1,2)HUANG Bin1,2)TANG Qiuyun1,2)
(Hubei Key Laboratory of Advanced Technology for Automotive Components, Wuhan 430070, China)1)(Hubei Collaborative Innovation Center for Automotive Components Technology, Wuhan 430070, China)2)
According to the feature that the four wheels independent drive electric vehicle has no driven wheel and its torque can be controlled independently, the seven degrees of freedom vehicle model and nonlinear magic formula tyre model are established. The offline simulation estimates of vehicle state parameters are carried out with the help of the additive noise UKF (Unscented Kalman Filter) algorithm? Based on the estimation algorithms designed by experimental platform, the longitudinal velocity measured by GPS is used as the reference value and other state parameters measured by gyro and other sensors are used as the measurement values, and road tests on cruise steering and S-shaped route driving case are performed to validate the effectiveness of UKF algorithm. Simulation and road test results show that UKF algorithm has high estimation precision and strong adaptability.
four wheel independent drive; state parameter estimation; UKF; GPS
2017-03-19
*武汉市科学技术局基金项目资助(2013011801010595)
U461.1
10.3963/j.issn.2095-3844.2017.03.004
付翔(1973—):女,博士,副教授,主要研究领域为新能源汽车动力系统
猜你喜欢
汽车实用技术(2022年19期)2022-10-19
北京航空航天大学学报(2022年8期)2022-08-31
土木建筑与环境工程(2022年4期)2022-05-14
内燃机与配件(2021年11期)2021-09-10
农业工程(2021年6期)2021-07-29
内燃机与配件(2020年20期)2020-09-10
居业(2019年3期)2019-06-07
电子制作(2019年23期)2019-02-23
实验流体力学(2018年6期)2018-02-13
北京航空航天大学学报(2017年9期)2017-12-18
