基于CREAM扩展法的信号交叉口驾驶差错概率预测*
2017-06-22 14:00:16陈美如裴玉龙
武汉理工大学学报(交通科学与工程版) 2017年3期
陈美如 裴玉龙
(哈尔滨工业大学交通科学与工程学院1) 哈尔滨 150090) (东北林业大学交通学院2) 哈尔滨 150040)
基于CREAM扩展法的信号交叉口驾驶差错概率预测*
陈美如1)裴玉龙2)
(哈尔滨工业大学交通科学与工程学院1)哈尔滨 150090) (东北林业大学交通学院2)哈尔滨 150040)
通过认知可靠性与差错分析方法扩展法计算驾驶差错概率,综合考虑了影响驾驶差错的外部因素和内部因素.建立信号交叉口驾驶事件序列,识别每个事件涉及到的认知活动;确定影响驾驶差错概率的共同绩效因子CPCs和各水平因子对认知活动的影响系数;根据交叉口的CPCs水平,确定对应水平的影响系数和可能的驾驶失效模式,计算驾驶差错概率基本值,并对其进行修正得到修正值.根据驾驶事件之间的关系,计算整个驾驶任务的驾驶差错概率.
驾驶差错概率;CREAM扩展法;共同绩效因子;认知活动;失效模式
0 引 言
驾驶员在行车过程中,受到自身因素、车辆因素、道路交通因素及环境因素的影响,驾驶员的认知活动会发生一定的错误,从而导致没有按照计划达到预定的驾驶目的,称为驾驶差错,是驾驶员偏离某种规范和标准的无意行为.严重的驾驶差错,会导致交通事故.目前,对驾驶差错的研究多集中于驾驶差错的致因分析[1-3]、驾驶差错防范措施研究[4-5]、特定场所驾驶差错行为分析[6-7]、驾驶差错分类[8]及驾驶差错分析方法[9]等,对驾驶差错概率进行预测的极少,因此,分析并预测某个交叉口的驾驶差错概率,可以为评价交叉口的安全水平提供参考.
1 信号交叉口驾驶任务及认知活动分析
认知可靠性与差错分析方法(cognitive reliability and error analysis method,CREAM)认为人类的行为是发生在一定的情景中的,任何描述人类行为的模型都必须能够解释情景是如何影响人类行为的[10].CREAM方法的核心理念是人的绩效输出取决于人执行任务时所处的情境,它通过影响人的认知功能和其在不同认知活动中的效应,最终决定人的响应行为.
CREAM扩展法驾驶差错概率预测的基本方法是:首先,分析驾驶人在驾驶过程中的认知活动及认知功能失效模式,然后计算认知功能失效概率的基本值,接着计算其所处情境的共同绩效因子(common performance conditions,CPCs),最后用CPCs对基本值进行修正,得到驾驶过程中的失效概率.
1.1 信号交叉口驾驶任务分析
驾驶任务的总目标为通过信号交叉口,到达目的出口道;然后总目标下分为三个子目标:①进入正确的进口车道;②停车线前确定适当的驾驶操作行为;③通过停车线,到达目的出口道.在从进入交叉口至通过交叉口,到达出口道的整个过程中,驾驶员始终注意周围车辆与行人,以确保安全行驶.信号交叉口驾驶任务事件序列见图1.
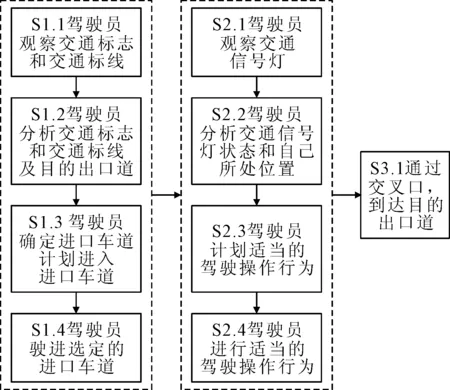
图1 信号交叉口驾驶任务分析
1.2 确定认知活动
CREAM将人类认知功能分为观察(observation)、解释(interpretation)、计划(planning)和执行(execution)四个部分.具体的认知活动包括协调、联络、对比、诊断、评价、识别、执行、保持、监视、观察、计划、记录、调整、扫视、验证等.信号交叉口驾驶任务的每个步骤涉及到的具体认知活动,见表1.
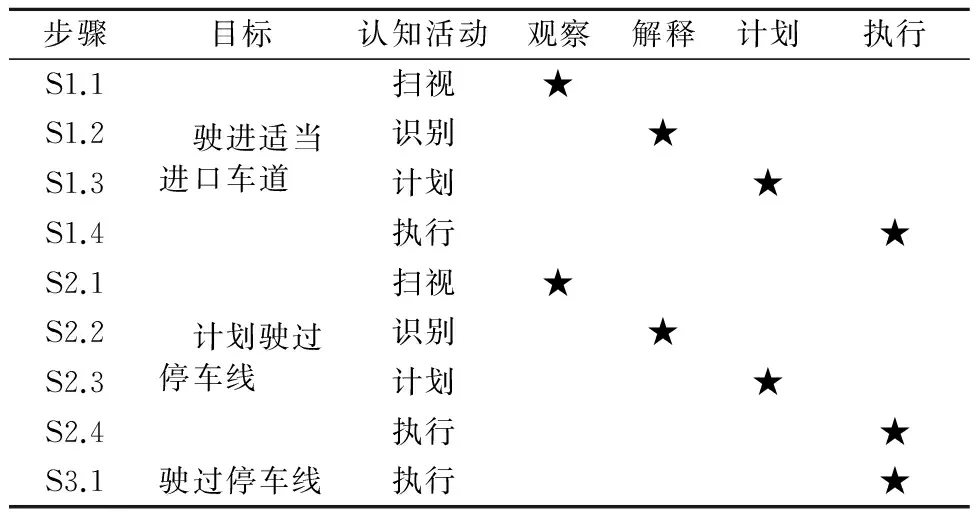
表1 信号交叉口驾驶任务认知活动
2 共同绩效因子的选择与计算
在驾驶活动中,影响驾驶行为的部分外界因素和自身因素是相互作用的,驾驶员的驾驶经验、习惯、目的地等影响着交通环境,同时道路环境、交通环境、自然环境、管理因素等影响驾驶员的驾驶技能、驾驶习惯、驾驶路线的选择.这些因素交互作用,并贯穿于驾驶过程中,影响着驾驶行为.
Hollnagel在CREAM方法中归纳了9种影响认知功能的因子,统称为共同绩效因子(CPCs).结合CREAM中的CPCs,根据驾驶环境特性,文中从外界道路交通因素及驾驶员自身因素两方面,归纳了影响信控交叉口驾驶差错概率的共同绩效因子,见表2.
1) 交通阻塞程度 通常评价交叉口交通拥堵的指标有排队长度、通过交叉口所需等待绿灯的次数、饱和度、占有率等.文中采用GA115-1995中信号控制交叉口交通阻塞度评价方法:通过交叉口所需等待绿灯次数.
车辆行至信号灯控制交叉口,3次绿灯显示未通过交叉口的为阻塞,5次绿灯显示未通过交叉口的为严重阻塞.由于该评价方法中不涉及畅通时的评价指标,因此将本方法稍加延伸,1次绿灯显示即通过交叉口为非常畅通,2次绿灯显示通过交叉口为畅通,3~4次为阻塞,大于等于5次为严重阻塞.
同一时段同一个信号交叉口内不同的进口道,拥堵程度也不完全相同,甚至差别很大.同一进口道,不同的车道,拥堵程度也不完全相同.因此,将交叉口交通拥堵等级按照不同进口道不同车道进行分析,同一进口道,取通过绿灯所需次数最高的那组车道行驶方向来评判本交叉口的拥堵等级.然后,取本交叉口所有进口道的最高通过绿灯所需次数的加权平均值为评判本交叉口的拥堵等级指标.测定方法为任选红灯显示时随即到达排队等待通过交叉口的最后一辆车,记录该车正常跟车行驶通过路口之前绿灯显示的次数.

表2 共同绩效因子
注:表中“-”为有利于减少驾驶差错的发生,也就是增加驾驶可靠性;“+”为增加了驾驶差错发生概率,也就是降低了驾驶可靠性.
2) 交通冲突率 在部分交叉口,机动车、非机动车、行人都能在各自的空间行进,互不干扰.在部分交叉口,三者之间存在交通冲突.按照交通冲突的对象将交叉口处交通冲突分为机动车之间的冲突、机动车与非机动车之间的冲突、机动车与行人之间的冲突.
交通冲突技术通常采用时均冲突与混合当量交通量的比值或TC/MPCU(严重交通冲突数量/交叉口进口混合当量交通量)来综合衡量交叉口的整体安全等级.采用TC/MPCU来计算交叉口的交通冲突率.
3) 永久性道路条件 永久性道路条件是指交叉口的路面材料、结构、交通管理与控制设施等.评价永久性道路条件对驾驶差错概率的影响的指标是计算对驾驶安全性有负面影响的永久性道路条件的数量Ny,具体如表2所示.不良永久性道路条件举例如下:遮挡驾驶员视线的树木、建筑、天桥等;限速不合理;夜间路灯不够亮;交叉口内车道错综复杂、不规则;信号灯设置位置指引不明确;车道宽度不足;车道划分不合理;交通标志信息错误;交通标志与交通标线信息矛盾.
4) 短暂性道路条件 短暂性道路条件是指道路条件受天气、道路施工等影响,对驾驶可靠性产生短暂影响的情况.这些因素通过影响驾驶员的视线、停车距离等而影响驾驶可靠性,如雨天影响驾驶员视线且路面湿滑,从而增加驾驶差错发生的可能性.评价短暂性道路条件也是通过计算影响驾驶差错概率的道路条件数量Nd.
5) 通过路口所需时间 设交叉口的信号周期时长为T,驾驶员通过交叉口的所需时间TR为驾驶员进入进口道后,从进口道虚实线交界处至通过出口道斑马线所需的时间,包含等待红灯和黄灯的时间、排队时间.TG为路口的绿灯时长.
6) 对道路的熟悉情况 驾驶员对道路的熟悉情况直接影响驾驶差错概率.第一次在此交叉口行驶的驾驶员,对交叉口车道的划分、交通信号周期等不熟悉,增加驾驶差错发生的可能性.而特别熟悉此交叉口的驾驶员,由于会放松警惕,也会增加驾驶差错发生的可能性,因此,通过调查驾驶员通过此交叉口的频次来评价对道路的熟悉程度.
7) 驾驶任务的复杂度 驾驶任务的复杂度即驾驶员需要同时处理的信息组数,如横穿马路的行人、交叉口附近的公交停靠站的车辆、交叉口附近的停车场出入口车辆.
8) 驾驶时的时间 驾驶时的时间通过人的生理规律影响驾驶差错概率.白天驾驶可靠性高,而夜晚驾驶可靠性低.
9) 驾驶经验和技能 驾驶经验和技能直接影响驾驶差错概率.
CPCs对认知功能的权重见表3.
3 驾驶员认知功能失效模式
根据交叉口的具体特性和CPCs水平,通过实地调查、问卷调查等确定最可能出现的认知功能失效模式.表4为可能出现的认知功能失效模式之一,不代表交叉口所有驾驶员的认知功能失效模式.
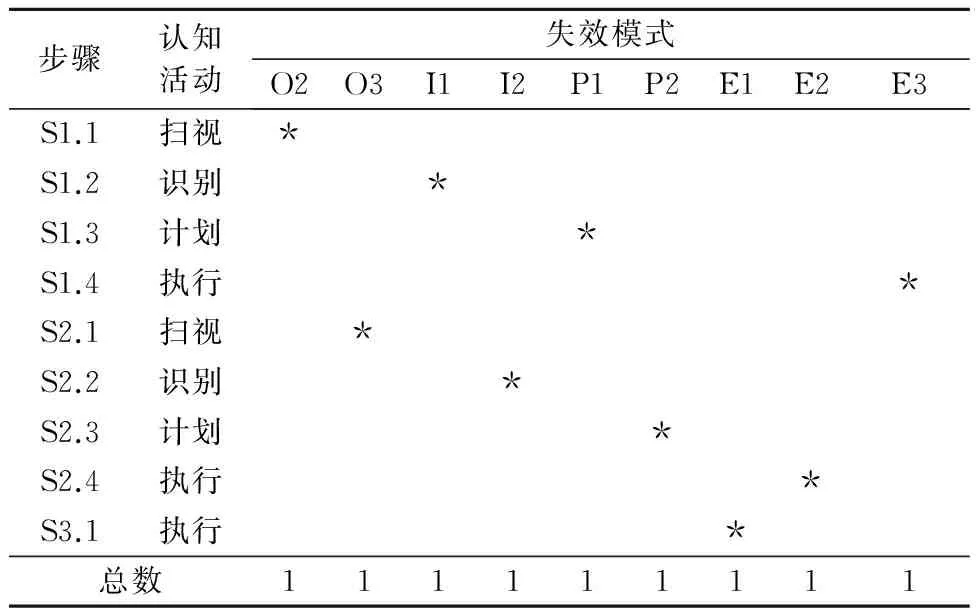
表4 认知功能失效模式
注:O2,O3,I1,I2,P1,P2,E1,E2,E3分别表示辨识错误、未观察、诊断错误或诊断不全面、决策错误、优先权错误、计划不充分、执行方式错误、行动实践错误和行动目标错误.
4 驾驶差错概率预测
某个交叉口的CPCs水平和其相应的CPCs影响系数见表5.
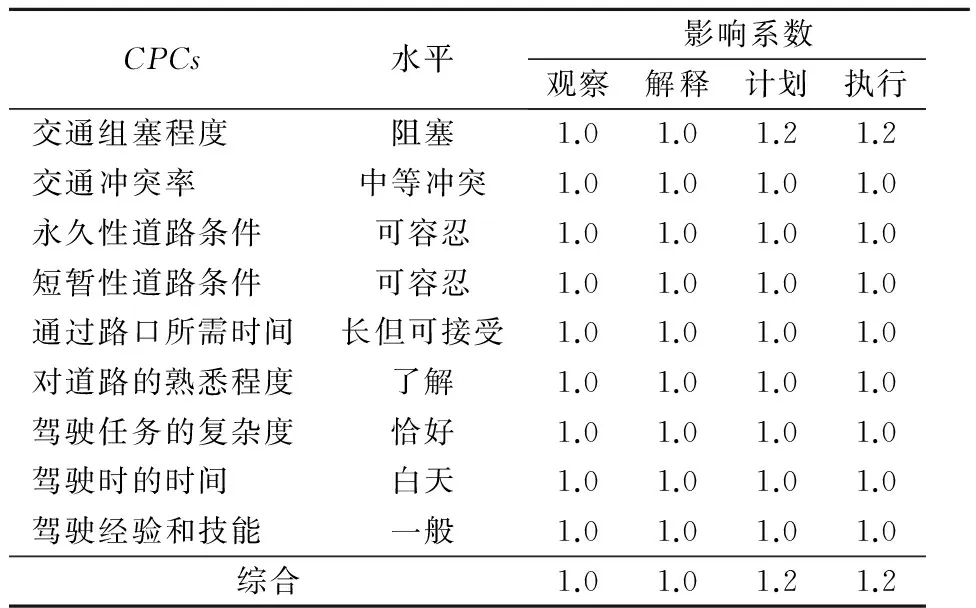
表5 CPCs水平及因子影响系数
每个CPCs因子的影响系数相乘,即可得到所有CPCs因子分别对观察、解释、计划、执行的综合影响.
根据表CREAM的基本差错概率和表5的交叉口驾驶失效模式,可以得到驾驶差错概率基本值,然后根据得到表5的综合影响系数对基本失效概率进行修正,基本差错概率与综合影响系数相乘,得到修正差错概率,见表6.
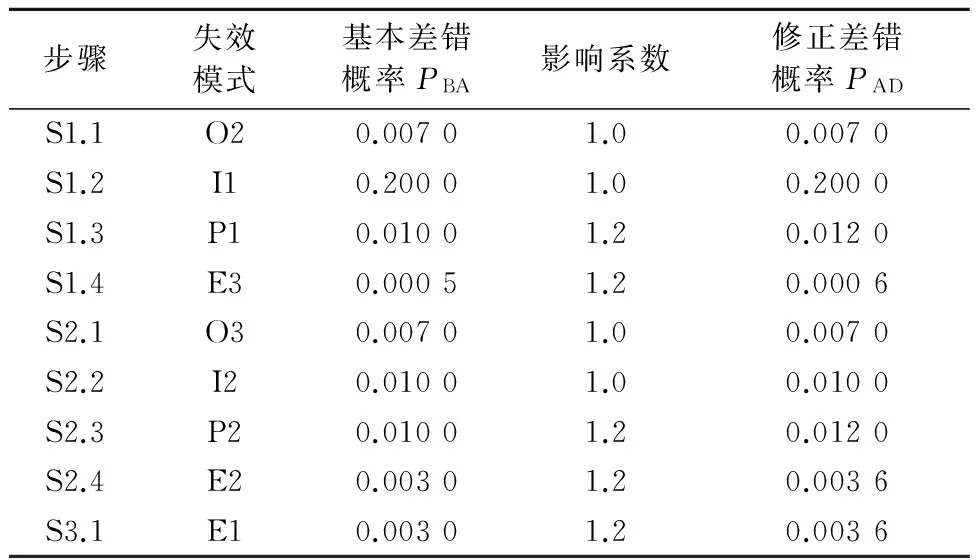
表6 基本差错概率及修正差错概率
最后,根据信号交叉口驾驶任务步骤和结构,计算整体驾驶差错概率.在整个事件序列中,若几个事件序列之间为串联关系,则差错概率为
(1)
式中:Pseries为串联事件序列的差错概率;Pi为第i个串联事件的差错概率;n为串联事件序列的总数.
若几个事件序列之间为并联关系,则差错概率为
(2)
式中:Pparallel为并联事件序列的差错概率;Pj为第j个并联事件的差错概率;m为并联事件序列的总数.
根据信号交叉口驾驶任务事件序列图,可知事件序列S1.1~S3.1为串联关系.因此,根据式(1)~(2),求的交叉口的驾驶差错概率值P为0.244,驾驶可靠度为0.756.从表6可知,S1.2的失效模式,即诊断错误或不全面,所造成的差错概率最大,导致最后的总体驾驶差错概率偏低的原因,因此,通过降低解释权重,提高CPCs水平,不仅可以降低这部分对总体差错概率的影响,而且可以降低其他部分的差错概率.
5 结 论
1) 分析信号交叉口驾驶任务,建立驾驶事件序列,从而确定每个事件对应的认知活动.
2) 结合CREAM共同绩效因子,并根据驾驶差错致因,确定驾驶差错概率共同绩效因子,并对其进行分级并确定每一级对相应认知功能的影响系数.
3) 识别每个驾驶序列中最可能的交叉口认知功能失效模式和基本差错概率,根据交叉口的具体CPCs水平,得出影响系数,对基本差错概率进行修正,从而得到差错概率的修正值.最后根据驾驶事件序列之间的并联或串联关系,计算整个驾驶任务的驾驶差错概率.
[1]DENNIS R D. Driving errors of learner teens: frequency, nature and their association with practice[J]. Accident Analysis and Prevention,2014,72:433-439.
[2]付坤.基于驾驶员与道路环境因素的驾驶行为差错数学分析[D].长春:吉林大学,2013.
[3]李显生.驾驶员生理状态对驾驶行为差错的影响[J].吉林大学学报(工学版),2012,42(增刊):161-165.
[4]谢力.道路交通中驾驶差错分布与防范措施研究[J].经营管理者,2015(2):403-409.
[5]黄荣贵.汽车驾驶员行为差错及其预防[J].人类工效学,2002,8(5):55-57.
[6]KRISTIE L Y. At the cross-roads: an on-road examination of driving errors at intersections[J]. Accident Analysis and Prevention,2013,58:226-234.
[7]GSTALTER H, FASTENMEIER W. Reliability of drivers in urban intersections[J]. Accident Analysis & Prevention,2010,42(1):225-234.
[8]STANTON N A, SALMON P M.Human error taxonomies applied to driving: a generic driver error taxonomy and its implications for intelligent transport systems[J]. Safety Science,2009,47(2):227-237.
[9]LYNN M, MICHELLE F. A validation study of driving errors using a driving simulator[J]. Transportation Research Part F,2015,29:14-21.
[10]HOLLNAGEL E. Cognitive reliability and error analysis method[M]. Oxford: Elsevier Science Ltd,1998.
Prediction of Driving Error Probability at Signalized Intersection Based on Extended CREAM Method
CHEN Meiru1)PEI Yulong2)
(School of Transportation Science and Engineering, Harbin Institute of Technology, Harbin 150090, China)1)(Traffic College, Northeast Forestry University, Harbin 150040, China)2)
Driving error probability (DEP) is calculated by the extended CREAM method which considers both the exterior and interior influence factors of driving errors. Firstly, the sequence of driving events at signalized intersections is established and cognitive activities that each step of the event sequence is involved are identified. Next the CPCs that affect DEP are proposed and the impact factors at all levels are calculated. According to the CPCs levels of the intersection, credible driving error modes are identified and the total influences of CPCs on cognitive function errors are assessed. Then, the nominal DEP of each step is calculated and revised by impact factors to gain adjusted DEPs. Finally, in accordance with the relationships of driving events, DEP of the whole driving task is calculated.
driving error probability; extended CREAM method; CPC; cognitive activity; error mode
2017-03-21
*国家自然科学基金项目资助(51078113)
U491.31
10.3963/j.issn.2095-3844.2017.03.003
陈美如(1985—):女,博士,主要研究领域为交通安全和交通规划
猜你喜欢
军民两用技术与产品(2021年1期)2021-07-28 06:05:54
作文周刊·小学一年级版(2020年40期)2020-10-19 04:42:20
重庆交通大学学报(自然科学版)(2017年3期)2017-05-17 03:37:32
福建中学数学(2016年7期)2016-12-03 07:10:28
娃娃乐园·3-7岁综合智能(2016年4期)2016-10-24 02:47:36
新闻传播(2016年17期)2016-07-19 10:12:05
中国房地产业(2016年2期)2016-03-01 01:25:37
系统工程学报(2015年3期)2015-02-28 19:54:01
河南科技(2014年14期)2014-02-27 14:12:02
海外英语(2013年8期)2013-11-22 09:16:04