南海海域超大型油船避台航线优化及安全评估*
2017-06-22 14:01:39张进峰彭斯杨马伟皓刘永森
武汉理工大学学报(交通科学与工程版) 2017年3期
张进峰 彭斯杨 马伟皓 刘永森
(武汉理工大学航运学院1) 武汉 430063) (国家水运安全工程技术研究中心2) 武汉 430063)(内河航运技术湖北省重点实验室3) 武汉 430063)
南海海域超大型油船避台航线优化及安全评估*
张进峰1,2,3)彭斯杨1,2)马伟皓1)刘永森1,2)
(武汉理工大学航运学院1)武汉 430063) (国家水运安全工程技术研究中心2)武汉 430063)(内河航运技术湖北省重点实验室3)武汉 430063)
台风是南海海域影响超大型油船VLCC航行安全的主要灾害性天气,实现安全、科学、有效地避台对保障VLCC航行安全具有重要的研究意义.在台风浪数值模拟和船舶失速计算的基础上,建立了安全约束条件下航时最短为优化目标的航线优化模型,设计动态规划算法求解全局最优的优化路径,以某VLCC规避2014年第9号台风“威马逊”为例进行了仿真,并运用国际海事组织(IMO)推荐的指南分析了优化航线的安全性.结果表明,提出的航线优化模型达到了安全和航时最短等设定的优化目标,航线安全性分析结果表明,发生谐摇和大幅度横摇的风险主要集中在避台后,不会对船舶航行安全构成威胁.
超大型油船;航线优化;避台;南海;安全评估
0 引 言
随着我国经济的发展,原油的需求急剧增加,原油的进口量逐年剧增.根据有关统计资料,2014年我国原油进口3.1亿吨,进口原油主要来自中东和北非,其中48%来自中东,承运进口原油的主力船型为30万吨级的超大型油船(very large crude carrier,VLCC),上述船舶航线均需通过南海海域,台风是该海域影响VLCC航行安全最大的自然灾害[1],在VLCC避台过程中,一旦发生事故,将会造成巨大的直接经济损失和海洋污染事故,因此,如何安全、科学、有效地避台是VLCC实现安全生产、保护海洋环境和提高经济效益的基本保障,开展针对南海台风的VLCC避台优化航线研究具有重要的研究意义.
目前,针对VLCC的避台航线的定量研究较少,主要为一些避台实践经验总结[2].结合VLCC的吃水深、惯性大、操纵不灵活等特点,在船舶失速计算的基础上,提出保障VLCC航行安全的最短航时航线,以最大程度地减小避台过程中的绕航和船期损失.根据文献[3]对优化航线上VLCC发生骑浪和打横、巨浪连续冲击、谐摇和大幅度横摇等风险进行定量评估,确保VLCC避台航线的安全,研究工作可为我国南海海域VLCC避台的自动化提供决策依据.
1 风浪中的船舶失速
船舶在大风浪中航行时,由于波浪的扰动作用将使船舶产生纵摇、横摇和首摇等各种运动,从而引起船舶阻力的增加,使在主机功率不变情况下航速要比静水中下降.
在进行避台航线优化过程中,必须对风浪中的船舶失速进行精确的计算.由于失速计算方法的针对性,本文选用Kwon[4]提出的主机功率不变条件下、7级及以下风速的风浪中船舶失速计算公式,船舶失速百分比表示为
×100%=αμσ
(1)
ΔV=V1-V2
(2)

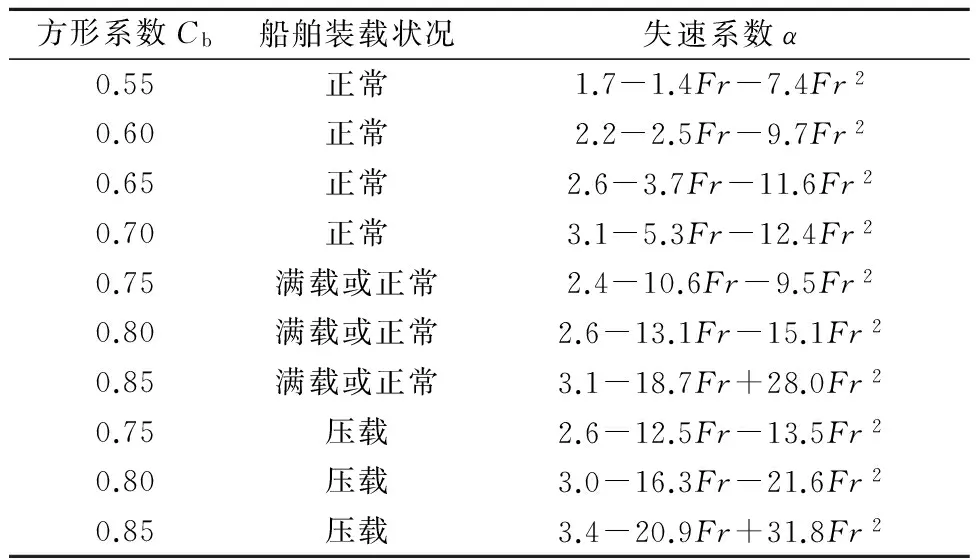
表1 船舶失速系数α

表2 船舶失速方向系数μ

表3 船型系数σ
2 航线优化案例
2.1 台风个例和船舶概况
文中以2014年第9号台风“威马逊”(Rammasun)为研究对象,“威马逊”是2014年7月16日00时-19日00时(世界时)之间影响我国南海海域的一次超强台风天气过程,其移动路径见图1.运用WAVEWATCH-Ⅲ海浪模式[5]对“威马逊”产生的台风浪进行数值模拟,模式计算结果采用网格输出,输出参数为有效波高、平均波长、平均波周期、平均波向等.
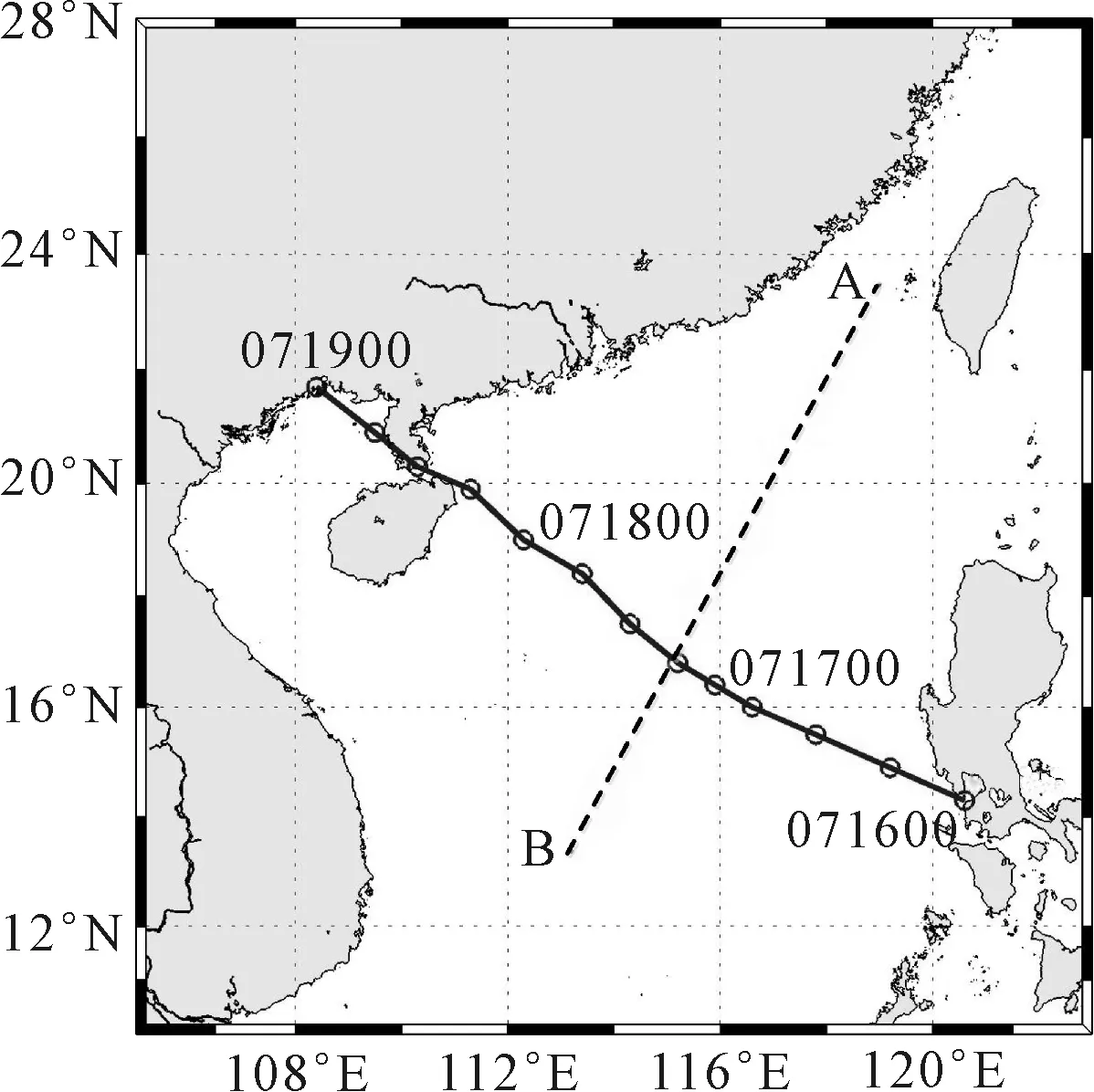
实线为“威马逊”的移动路径;虚线为船舶计划航线图1 海浪模式计算区域
文中以我国一艘实际运营于中东航线的满载VLCC为例,船型主尺度见表4.所选航线为由我国台湾海峡至马六甲海峡方向VLCC通过我国南海的一段实际航线,见图1中的实线,所选航段起点A的位置为119°00′02″E,23°30′01″N,所选航段终点位置为113°10′03″E,13°20′02″N,船舶通过起点A的时间为2014年7月16日06:00(世界时).
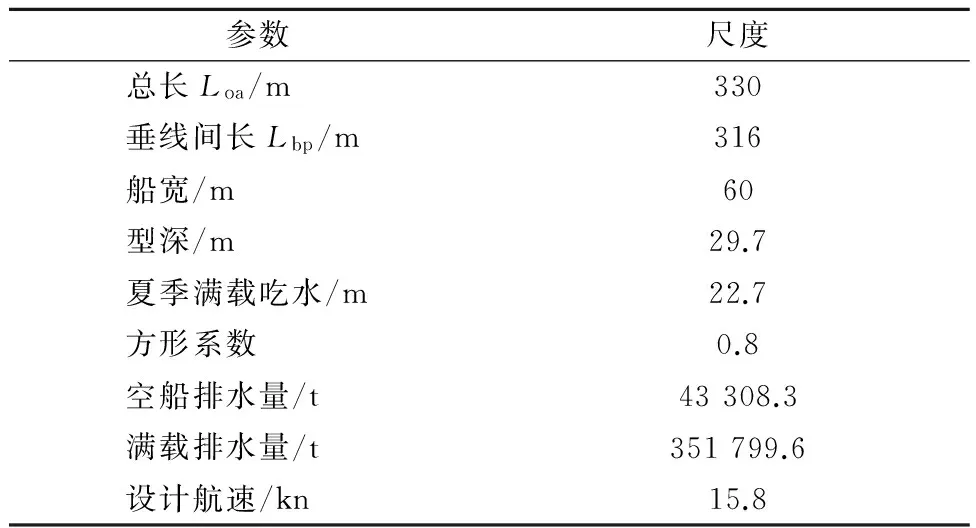
表4 船型主尺度
2.2 航线优化目标函数
在台风浪数值模拟的基础上,根据船舶计划航线、台风风场和波浪场数据对船舶失速进行了计算.在船舶失速分布的基础上,建立的VLCC避台过程中的船舶航行总时间的目标函数可表示为
(3)
s.t.
(4)
(5)
(6)
(7)

为了保障VLCC的航行安全,根据航海实践,优化航线的安全限制条件为台风的7级风圈(即风速小于17.2 m/s)外通过.
2.3 航线优化结果
采用动态规划算法进行求解[6],优化结果为安全限制条件下的航时最短航路,航线总航行时间为51.27 h,经优化的船舶航路点见表5,各航段的优化航路见图2.图2a)~d)分别为船舶航行17.16,29.84,42.31和51.27 h对应的航路点WP3,WP5,WP7和WP9(终点),图2中背景为对应时刻的海面有效波高分布.由图2可见,求解的优化航路为选择从台风移动方向后方航行通过,优化航线较好地避开了台风的大风浪区,可达到安全避离台风的优化目标,也符合航海实践.本优化算法全面考虑了台风浪的动态变化,且每个阶段的优化目标都是沿着时间最短的路径,最终得到的路径规划方案是全局最优的.
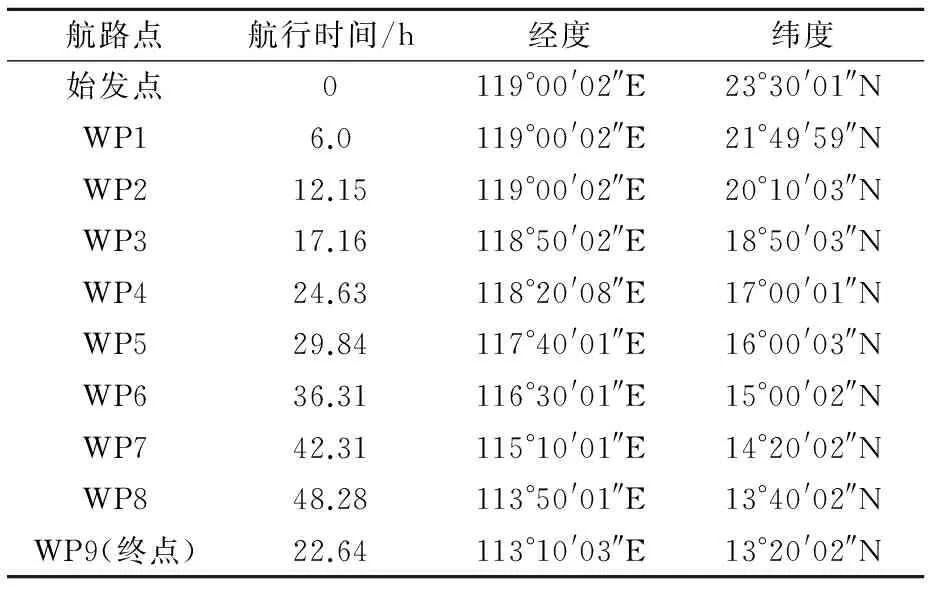
表5 经优化的船舶航路点
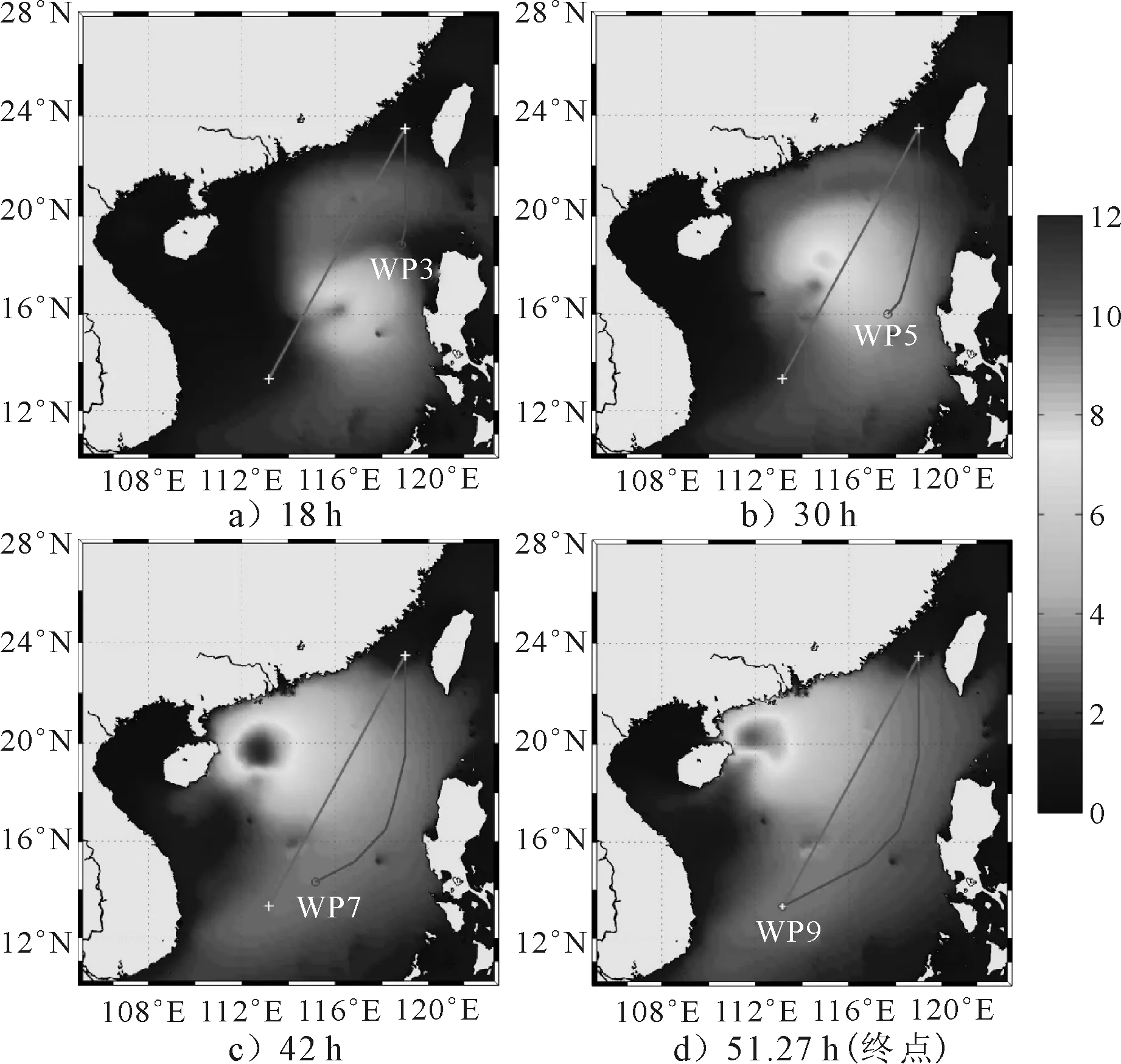
图2 VLCC优化航线和有效波高分布
3 航线安全性分析
根据文献[3],在不利气象和海况条件下,船舶顺浪或偏顺浪航行时存在较大的安全风险.顺浪航行虽然具有降低波浪对船的相对速度从而缓解波浪对船舶的袭击,同时船舶在风浪中可以保持较高的船速,有利于摆脱风浪区等优点,但是顺浪或偏顺浪航行中仍然存在船舶稳性降低、出现打横、谐摇等危险[7].
3.1 骑浪和打横风险分析
船舶顺浪或偏顺浪航行时,处于陡峭大浪最前端而骑浪被加速,即发生骑浪(surf riding),由于作用在船尾左右两舷的波浪力不同,在船舶上作用一个使船舶转向横浪的力矩,从而会出现航向不稳定状态,甚至突然产生首摇而横于波浪中,即所谓打横(broaching to).此时船舶瞬间产生很大的横倾,袭来的波浪打到船上便会使船舶陷入非常危险的局面.

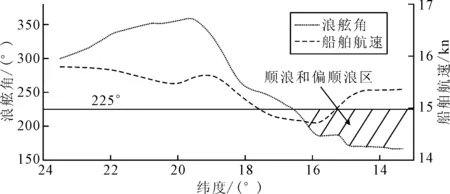
图3 优化航线的船舶航速和浪舷角分布
3.2 巨浪连续冲击风险分析
根据文献[3],当波浪的平均波长大于0.8L且有效波高大于0.04L时,船舶将面临巨浪连续冲击(successive high-wave attack)的风险,具体危险区域为波浪遭遇周期为波周期的1.8~3.0倍时,将产生完整稳性损失、谐摇、大幅度横摇运动或各种危险组合而产生的危险.
优化航线受巨浪连续冲击影响的危险区域见图4.
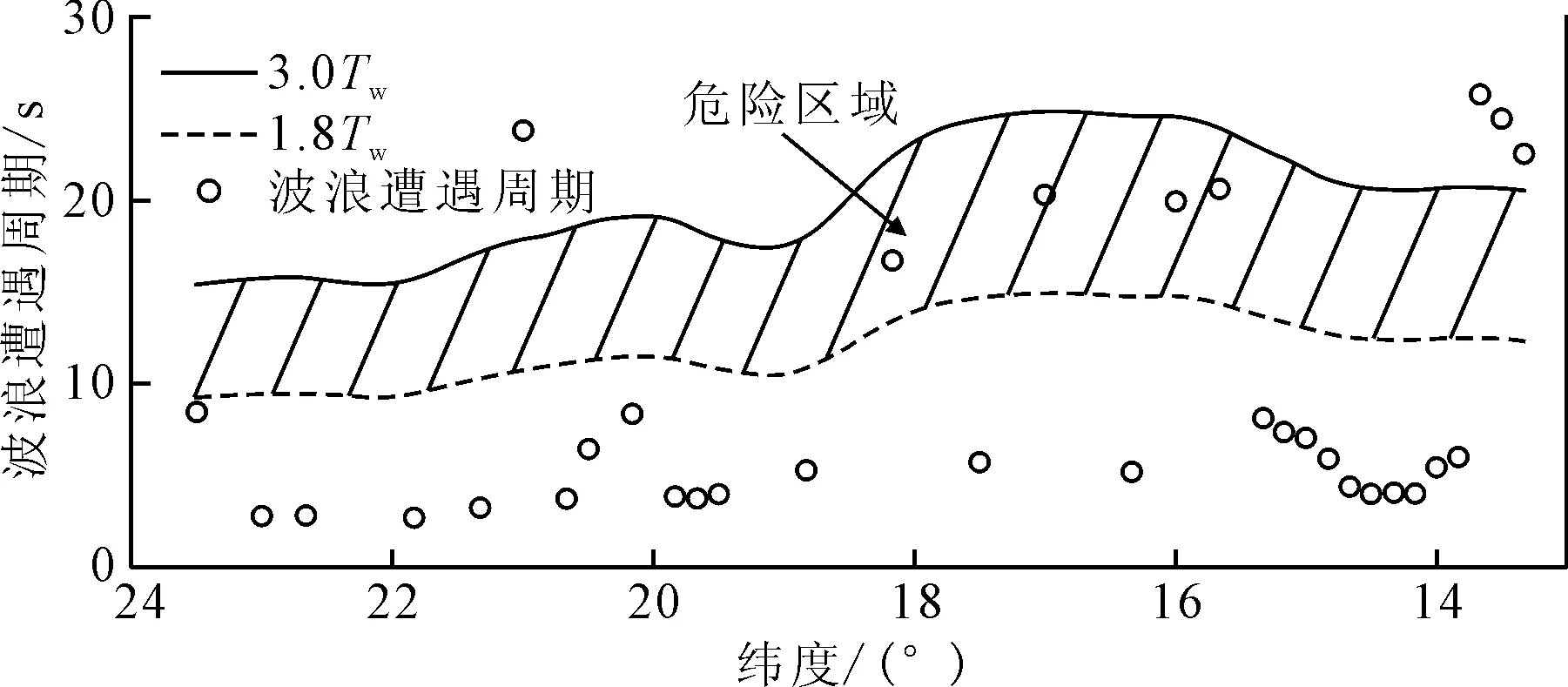
图4 巨浪连续冲击时的危险区域
根据VLCC的船舶资料,对本船造成风险的临界条件为浪的平均波长大于264 m且有效波高大于13.2 m时.根据台风浪数值模拟结果,优化航线上的波长和有效波高最大值分别为117 m和4.62 m,因此在优化航线上船舶将不受巨浪连续冲击的影响.由图4可见,本船航路存在个别阶段位于危险区域,考虑到台风天气过程中可能遭遇波浪极值,为避免可能产生的遭受巨浪连续冲击的风险,必要时船舶应降低航速或改变航向.
3.3 谐摇和大幅度横摇风险分析
根据文献[3],当波浪遭遇周期TE与船舶的固有横摇周期TR接近时,船舶将产生谐摇(synchronous rolling motion);当波浪遭遇周期接近于船舶的固有横摇周期TR的一半时,船舶将产生大幅度横摇(parametric rolling motion).其中波浪遭遇周期TE和船舶的固有横摇周期TR分别可表示为

(8)

(9)
C=0.373+0.023(B/d)-0.043(L/100)(10)

当波浪遭遇周期TE与船舶的固有横摇周期TR接近的范围一般为:TE=(0.7-1.3)TR,当波浪遭遇周期TE接近于船舶的固有横摇周期TR的一半时的范围为:TE=(0.3-0.7)TR.根据VLCC的船舶资料,优化航线中的波浪遭遇周期TE与船舶的固有横摇周期TR关系见图5~6.由图5~6可知,优化航线的部分阶段存在谐摇和大幅度横摇的风险,但主要风险区域位于船舶避台后,船舶受大风浪的影响均有所减弱,因此,本优化航线发生谐摇和大幅度横摇的风险较小,必要时船舶应及时调整航速或航向.

图5 波浪遭遇周期与船舶固有横摇周期接近时危险区域

图6 波浪遭遇周期与船舶固有横摇周期的一半接近时的危险区域
4 结 束 语
文中讨论了VLCC避台的优化决策和航线安全性问题,针对南海典型VLCC航线的避台需求,建立了安全限制条件下的航时最短为优化目标的航线优化模型,采用动态规划算法求解的优化路径为全局最优解.对优化航线的安全性进行了风险分析,结果表明,优化的航线不具备发生骑浪和打横、巨浪连续冲击的发生条件,但航线在一定范围内具有发生谐摇和大幅度横摇的风险,主要风险区域位于船舶避台后,对船舶航行安全的影响有限,必要时在上述航段船舶应及时调整航速或航向.文中提出的航线优化方法可作为南海区域VLCC避台的技术依据,为下一阶段实现船舶自动化避台打下基础.
[1]WANG J W, LI M C, LIU Y X, et al. Safety assessment of shipping routes in the South China Sea based on the fuzzy analytic hierarchy process[J]. Safety Science,2014,62:46-57.
[2]杨福弟.VLCC油轮避台策略的探讨[J].航海技术,2013(4):5-6.
[3]IMO. Revised guidance to the master for avoiding dangerous situations in adverse weather and sea conditions: MSC/Circ.1228[S]. London:International Maritime Organization,2007.
[4]KWON Y J. Speed loss due to added resistance in wind and waves[J]. Naval Architect,2008(3):14-16.
[5]TOLMAN H L. User manual and system documentation of WAVEWATCH III version 3.14[R]. Noaa/Nws/Ncep/Mmab, Technical Note,2009.
[6]张进峰,王晓鸥,刘永森.基于动态海浪环境的我国近海船舶避台航线优化[J].中国航海,2016,39(2):45-49.
[7]赵月林.大风浪中船舶顺浪和斜顺浪航行的危险及对策[J].大连海事大学学报,2006,32(3):5-10.
Optimization of VLCC Avoiding Typhoon Route and Safety Assessment in South Sea
ZHANG Jinfeng1,2,3)PENG Siyang1,2)MA Weihao1)LIU Yongsen1,2)
(School of Navigation, Wuhan University of Technology, Wuhan 430063, China)1)(National Engineering Research Center for Water Transport Safety, Wuhan 430063, China)2)(Hubei Inland Shipping Technology Key Laboratory, Wuhan 430063, China)3)
Typhoon is the major weather disaster which affects the navigation safety of VLCC in the South China Sea. The important significance is considered for avoiding the typhoon safely and efficiently to ensure the navigation safety of VLCC. On the basis of typhoon wave numerical simulation and ship speed loss calculation, the ship route optimization model is established for minimum time route under safety constraints, which is solved by the dynamic programming algorithm for global optimization. Typhoon “Rammasun” (No.1409) is chosen as an example for the simulation. The recommended guidelines of the International Maritime Organization (IMO) are used to analyze the safety of the optimized route. The results show that the proposed route optimization model achieves the goal of safety and minimum time of the ship route. The safety analysis shows that the risk of synchronous rolling and parametric rolling motions is concentrated in the area after avoiding typhoon, so it will not pose a threat to the navigation safety.
VLCC; route optimization; avoiding typhoon; south sea; safety assessment
2017-04-22
*国家自然科学基金项目资助(51209166)
U675.5+4
10.3963/j.issn.2095-3844.2017.03.009
张进峰(1980—):男,博士,副教授,主要研究领域为水上交通安全与环境、航线优化
猜你喜欢
青年文学家(2023年14期)2023-06-20 12:08:46
学苑创造·A版(2022年4期)2022-06-18 11:22:44
舰船科学技术(2022年10期)2022-06-17 06:27:54
小雪花·小学生快乐作文(2020年3期)2020-10-13 09:48:18
当代陕西(2020年24期)2020-02-01 07:06:46
汉语世界(The World of Chinese)(2019年3期)2019-07-01 02:37:48
小哥白尼(趣味科学)(2018年12期)2018-12-18 02:13:58
中国三峡(2017年2期)2017-06-09 08:15:25
中国航海(2014年1期)2014-05-09 07:54:24
环球时报(2013-01-31)2013-01-31 18:15:44