高动态BDS接收机测速精度分析及改进措施
2017-06-22 14:25:04刘盟超赵丙风
无线电工程 2017年7期
刘盟超,赵丙风,韩 帅
(1.卫星导航系统与装备技术国家重点实验室,河北 石家庄 050081;2.中国电子科技集团公司第五十四研究所,河北 石家庄 050081;3.中华通信系统有限公司 河北分公司,河北 石家庄 050081)
高动态BDS接收机测速精度分析及改进措施
刘盟超1,2,赵丙风1,韩 帅3
(1.卫星导航系统与装备技术国家重点实验室,河北 石家庄 050081;2.中国电子科技集团公司第五十四研究所,河北 石家庄 050081;3.中华通信系统有限公司 河北分公司,河北 石家庄 050081)
基于高动态BDS接收机高精度测速的需求,介绍了实现接收机速度测量的多普勒获取方法,分析了高动态应用下的多普勒精度,将加加速度动态下载波环路带宽和观测量更新频率对多普勒误差的影响进行了仿真,提出了通过增加环路带宽和提高观测量更新频率来改善加加速度应力下的测速偏差的方法。应用自研的高动态BDS接收机,对速度、加速度和加加速度3种动态应力下的测速精度进行了测试验证。结果表明,BDS接收机能够在10 000 m/s速度、100 g加速度动态下实现0.05 m/s的测速精度,改善后在50 g/s加加速度动态下可实现0.2 m/s的测速精度。
高动态;测速;加加速度;北斗卫星导航系统
0 引言
随着北斗卫星导航系统(BDS)的建设,BDS接收机逐步应用于高动态民用航空应用,在这些应用中,用户需要接收机提供实时准确的速度测量结果,因此高动态应用环境下的高精度测速成为了BDS接收机的关键技术之一。
导航接收机通过对卫星信号多普勒的测量实现自身速度的计算,而对卫星信号载波相位的精确跟踪是获取准确多普勒观测值的前提。文献[1-2]对高动态应用下导航接收机的载波相位跟踪环路进行了分析和仿真,并且对加速度下的环路状态和多普勒测量精度进行了分析。文献[3-4]论述了多普勒测量值的获取方法,利用载波相位差分获得高精度多普勒测量值的方法得到了广泛认可和应用。然而,现有文献缺乏在高动态应用,特别是加加速度等高阶动态应力下的测速精度分析。
本文拟对BDS接收机在高动态应用环境,特别是加加速度下的测速误差进行分析和仿真,提出切实可行的测速误差改善措施,并利用自研的BDS接收机进行实际验证和测试。
1 多普勒观测量获取原理
用于实现测速的多普勒观测量可以通过接收机的锁相环实时产生,也可以通过载波相位观测量差分得到。由锁相环产生多普勒近似于实时产生[5-6],而载波相位差分获得的是2个观测量时刻之间的平均多普勒,因此前者具有较大的噪声误差而后者等效于在一个观测量时间内的平滑,从而随机噪声误差得到了很好的抑制。
1.1 理想FIR滤波器
从载波中获取多普勒需要经过微分操作,理想离散时间微分器的频率响应如下:

(1)
式中,ω为输入信号的频率;ωs=2π/T为信号采样频率;T为对应的采样间隔。
由于载波相位观测量是离散信号,所以可以采用卷积运算完成对载波相位的微分,换句话说,对载波相位观测量的微分过程可以等效为一个非递归有限冲击响应滤波器(FIR):
(2)

1.2 中央差分逼近法
中央差分逼近法是依据泰勒级数展开来进行多普勒估计的。给定方程f(x)和步进值Δt,那么关于f(x)在x+Δt处的泰勒级数展为:

(3)
相同的,关于f(x)在x-Δt处的泰勒级数展开为:

(4)
结合式(3)和式(4),可以得到多普勒的N点中央差分逼近法的通用表达式为:
Φ(t-kΔt))+O(ΔtN-1)。
(5)
式中,Ck为第k个差分项的系数;O(ΔtN-1)为高阶截断误差;N为泰勒级数展开式的阶数,实际应用中一般取≥3的奇数。
当N=3时,载波相位的一阶中央差分逼近,其严谨表达式为:

(6)


(7)
可以看出,一阶中央差分逼近法在计算多普勒的过程中利用了3个载波历元观测量,实现简单,并且能够提供比较高的估计精度。很明显,该方法估计出的多普勒值是2Δt时间内的平均多普勒变化量,相比于瞬时多普勒估计值,其噪声影响经过时间平均后明显下降[10]。一阶中央差分逼近法是工程中应用最广泛的多普勒估计方法,也是寻求高精度测速的BDS接收机的最优选择。
2 高动态应用下多普勒精度分析
高动态应用是指BDS接收机在较大速度、加速度乃至加加速度运动环境的应用,在这种环境下,接收机相对卫星存在很大的动态,从而对多普勒的获取造成误差。这种误差通常来源于载波跟踪环路的测量误差和多普勒观测量的估计误差[11]。
2.1 载波跟踪环路测量误差
对于三阶锁相环设计的载波跟踪环路,其环路测量误差主要由热噪声误差、基准振荡器相位噪声和动态应力误差组成[12]。根据上面的论述,热噪声误差可以通过多普勒估计时对载波测量值的平均而大大削弱;基准振荡器相位噪声带来的误差对于所有卫星是相同的,因此可以在测速解算时消除,不会对测速精度造成影响;而动态应力误差是根据载体与卫星相对运动状态的不同而实时变化,直接叠加在多普勒估计值中并且是无法消除的。因此在高动态应用下,动态应力误差是不可忽略的测量误差之一。对于由最小均方误差设计三阶锁相环滤波器,其动态应力误差为[13]:

(8)

由式(8)可知,对于三阶锁相环,速度应力与加速度应力不会对环路造成影响,而加加速度应力会给环路引入动态应力误差,此时多普勒测量值会随之出现测量误差。例如,当用户相对卫星处在10 g/s的匀加加速度运动时,对于BDS系统B3频点信号,可以计算得到18 Hz带宽的三阶锁相环多普勒测量误差为0.034 Hz。其中g为重力加速度,取值为9.8 m/s2,即

(9)
2.2 多普勒估计误差
通过2.1节的论述,采用式(7)进行的一阶中央差分逼近法多普勒估计存在高阶截断误差,为:
(10)
同样,当用户相对卫星处在10 g/s的匀加加速度运动时,对于BDS系统B3频点信号,当观测量采样频率为10 Hz时,可以计算得到利用一阶中央差分逼近法进行多普勒估计的误差为0.691 Hz,即
(11)
2.3 误差改善措施分析
根据式(8)可知,载波跟踪环路动态应力误差的大小与环路噪声带宽的3次方成反比,因此,增加环路带宽可以很好地降低动态应力误差。然而,环路带宽过宽会导致更多频率的噪声通过滤波器,使环路的噪声性能下降,从而增加信号跟踪的噪声误差,通常的高动态接收机中要求三阶PLL带宽不超过25 Hz[14]。因此,合理的选择环路带宽是高动态载波跟踪环路设计的重点[15]。对不同环路带宽下的多普勒测量误差进行了仿真如图1(a)所示,仿真信号频点为BDS系统B3频点。由图1(a)可知,多普勒测量误差随着环路带宽的增加而减小,与环路带宽的3次方成反比。
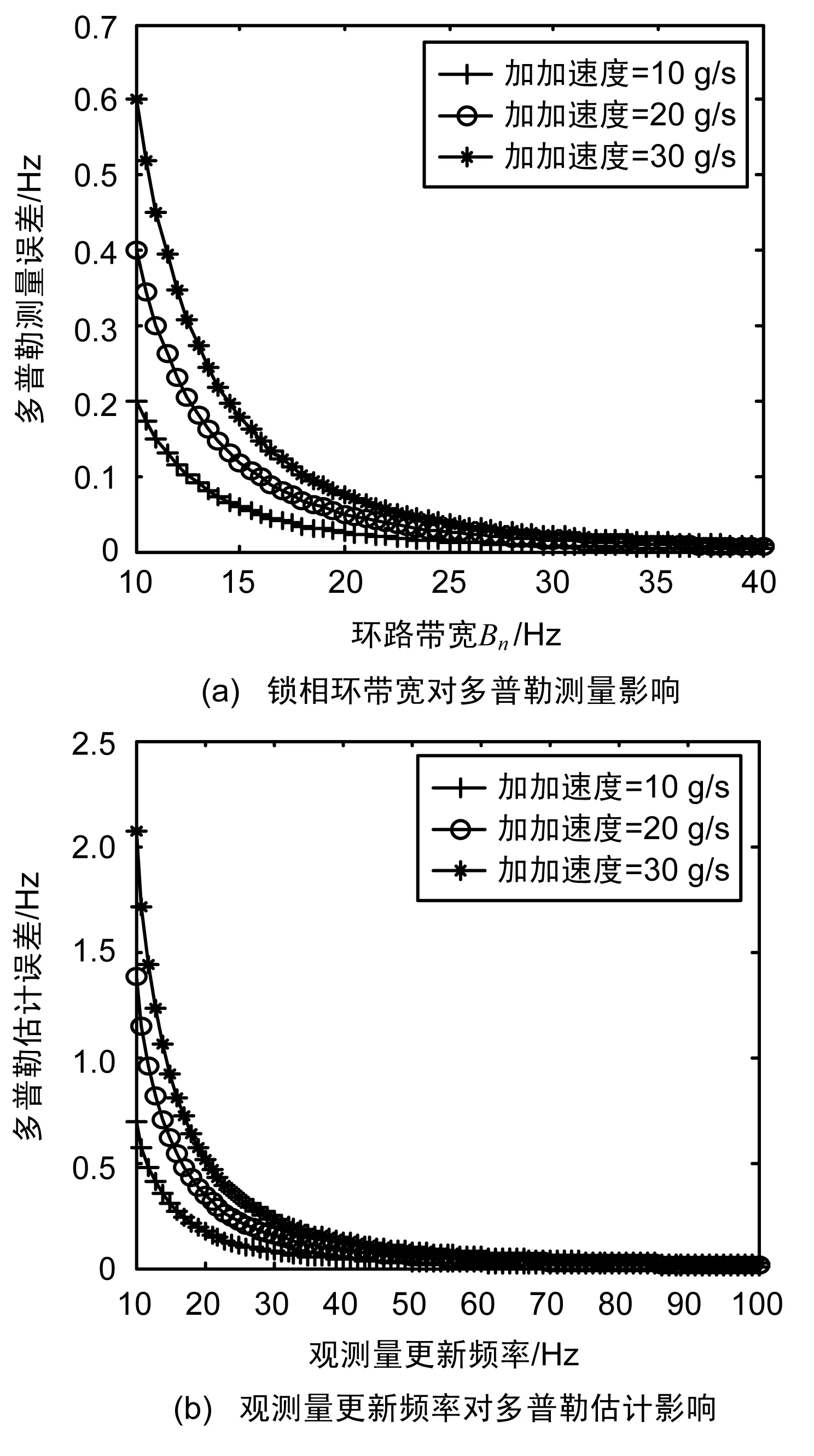
图1 多普勒误差影响因素
根据式(10)可知,利用一阶中央差分逼近法进行多普勒估计带来的高阶截断误差与载波相位观测量的时间间隔Δt的平方成正比。因此,提高观测量更新频率,即减小观测量的时间间隔Δt,可以有效地降低高阶截断误差。事实上,根据泰勒级数展开逼近法的原理,更高阶的泰勒级数展开可以无失真地逼近更高阶的频率分量,但是高阶运算带来的计算负担与其性能增长不成比例,不适合工程应用。因此,通过提高观测量的更新频率来降低多普勒估计误差是工程中的常用方法,特别是在高动态应用场合,为了保证实时定位和测速,接收机通常会尽可能地提高观测量更新频率。
然而,通过1.1节的论述可知,利用载波相位进行多普勒估计的方法等效于将2个观测量之间的多普勒进行平均,观测量更新频率越高,平均时间越短,则多普勒的噪声误差越大。同时,观测量更新频率越高意味着测速解算处理时间越短,对硬件设计资源和硬件复杂度的要求就越高,大大提高设计成本和功耗。因此,对高动态BDS接收机来说,100 Hz是通常观测量更新频率的极限。对不同观测量更新频率下的多普勒估计误差进行了仿真如图1(b)所示,仿真信号频点为BDS系统B3频点。由图1(b)可知,多普勒测量误差随着观测量更新频率的增加而减小,与观测量更新频率的平方成反比。
3 测速精度测试与结果分析
利用自研的BDS接收机对高动态环境下测速精度进行测试,BDS接收机的设计参数为:信号为BDS系统B3频点,载波跟踪环路采用三阶锁相环,环路带宽默认为18 Hz;载波相位观测量更新频率默认为10 Hz;多普勒估计方法为一阶中央差分法,如式(7)所示;速度解算方法选择最小二乘法[16]。
采用BDS导航信号模拟器产生高动态用户场景,分别产生匀速运动场景、匀加速运动场景和匀加加速运动场景。其中,匀速运动场景设计为匀速直线运动,速度分别为1 km/s、5 km/s和10 km/s,测速误差如图2所示。由图2可知,在匀速运动时,仅有速度应力影响,测速结果仅有随机噪声误差,不存在其他误差。

图2 匀速运动测速误差
匀加速运动场景设计为匀加速直线运动,加速度分别为10 g、50 g和100 g,测速误差如图3所示。由图3可知,在匀加速运动时,有加速度应力和速度应力影响,测速结果仅有随机噪声误差,不存在其他误差。

图3 匀加速运动测速误差
匀加加速运动场景设计为匀速运动(10 m/s)->匀加加速运动->匀加速运动(100 g),加加速度分别设计为10 g/s、20 g/s和30 g/s,测速误差如图4所示。
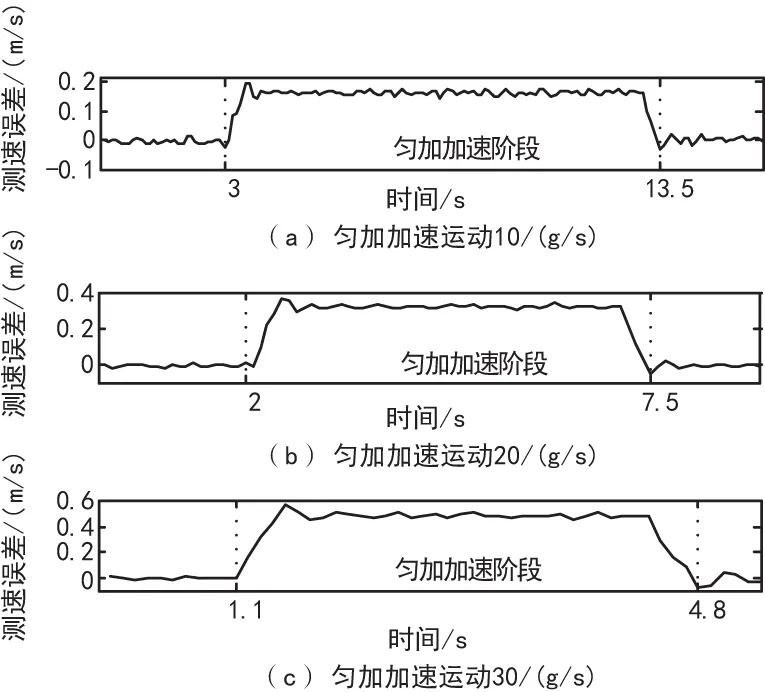
图4 匀加加速运动测速误差
由图4可知,在接收机进入匀加加速度运动时,测速误差产生跳变,并且在匀加加速度阶段保持稳定,说明测速结果与真实速度值之间存在一定的偏差。这是由加加速度引起的环路动态应力误差和多普勒估计误差带来的,由于环路动态应力误差和多普勒估计误差均是加加速度的一次函数,因此在匀加加速度下,误差值保持不变,则测速结果的偏差值保持稳定,并且与加加速度大小成正比。
按照2.3节论述的方法对BDS接收机进行改进。将载波环路带宽增加到25 Hz,观测量更新频率提高到50 Hz,再次进行匀加加速运动测试,加加速度分别设计为10 g/s,30 g/s和更高的50 g/s,测速误差如图5所示。由图5可知,提升环路带宽和观测量更新频率使测速的随机误差变大,但是对加加速度动态下的测速偏差有明显改善。在30 g/s加加速度时,其测速偏差由改善前的0.4 m/s减小到0.1 m/s,而50 g/s时测速偏差也小于0.2 /s。

图5 改进后匀加加速运动测速误差
由上述测试结果,可以得出:
① 速度应力和加速度应力对基于三阶锁相环设计接收机不会造成影响,测试结果表明在10 000 m/s速度和100 g加速度环境下,测速误差仍能保证在0.05 m/s以内。
② 加加速度应力会给多普勒测量引入误差,从而使测速结果产生偏差,偏差大小与加加速度大小成正比。
③ 增加载波环路带宽和提高观测量更新频率虽然令多普勒测量精度变差,导致测速的随机误差变大,但是能够使加加速度应力引入的多普勒误差减小,从而使测速结果的偏差获得很大改善。测试结果表明,25 Hz环路带宽和50 Hz观测量更新频率设计时,接收机能够在50 g/s的加加速度下测速误差小于0.2 m/s。
4 结束语
基于对多普勒误差的分析,利用自研的BDS接收机对高动态场景的测速精度进行了专题验证测试,对不同动态应力下的测速误差得到了实测结果,通过增加载波环路带宽和提高观测量更新频率的措施使加加速度环境下的测速偏差获得改善,有效地提高了测速精度。高动态BDS接收机在研制过程中可根据实际动态大小灵活地选择环路噪声带宽和观测量更新频率,以满足用户对测速精度的要求。
[1] 王淑君,易翔,孟建,等.动态环境下载波锁相跟踪环的信号级仿真[J].无线电工程,2012,42(3):31-33.
[2] 郑兴平,寇艳红.高动态GPS接收机跟踪环路设计与实现[J].无线电工程,2010,40(1):26-28.
[3] GAGLIONE S,PETOVELLO M.How Does a GNSS Receiver Estimate Velocity?[J].Inside GNSS,2015,10(2):38-41.
[4] 闫勇伟,叶世榕,夏敬潮.BDS载波相位历元间差分测速方法研究[J].测绘科学,2016,41(7):193-196.
[5] 王拓,吕志伟,殷实,等.北斗多普勒测速精度的分析[J].测绘信息与工程,2012,37(2):16-19.
[6] 祝燕华,蔡体菁,李春.提高GPS精度的差分定位定速算法[J].传感器与微系统,2012,31(11):122-124.
[7] ZHANG J,ZHANG K F,GRENFELL R,et al.Real-time Doppler/Doppler Rate Derivation for Dynamic Applications[J].Journal of Global Positioning Systems,2005,44(1-2):95-105.
[8] BRUTON A M,GLENNIE C L,SCHWARZ K P.Differentiation for High-precision GPS Velocity and Acceleration Determination[J].GPS Solutions,1999,2(4):7-21.
[9] WANG Q X,XU T H.Combining GPS Carrier Phase and Doppler Observations for Precise Velocity Determination[J].Science China,2011,54(6):1 022-1 028.
[10] 单瑞,赵铁虎,于得水,等.单点GPS多普勒测速模型比较与精度分析[J].测绘通报,2013,33(3):7-9.
[11] WANG F H,ZHANG X H,HUANG J S.Error Analysis and Accuracy Assessment of GPS Absolute Velocity Determination without SA[J].Geo-spatial Information Science,2008,11(2):133-138.
[12] 谢钢.GPS原理与接收机设计[M].北京:电子工业出版社,2009.
[13] 寇艳红.GPS原理与应用(第2版)[M].北京:电子工业出版社,2012.
[14] 吴琼,寇艳红,郑兴平.高动态GPS接收机环路跟踪技术研究[J].无线电工程,2008,38(12):32-36.
[15] 唐康华,武成锋,杜亮,等.高动态GNSS接收机载波跟踪环自适应最优带宽设计与试验[J].中国惯性技术学报,2014,22(4):498-503.
[16] 孟宪伟,王世臣.一种利用卫星导航系统提高载体动态测速性能的新方法[J].导航定位学报,2014,2(1):27-29.
Analysis and Improvement of Velocity Determination Accuracy of High Dynamic BDS Receiver
LIU Meng-chao1,2,ZHAO Bing-feng1,HAN Shuai3
(1.StateKeyLaboratoryofSatelliteNavigationSystemandEquipmentTechnology,ShijiazhuangHebei050081,China;2.The54thResearchInstituteofCETC,ShijiazhuangHebei050081,China;3.ChinaCommunicationSystemsCo.Ltd.,HebeiBranch,ShijiazhuangHebei050081,China)
Based on the requirement of high accuracy velocity determination,the Doppler acquisition method for high dynamic BDS receiver velocity determination is introduced,and the Doppler accuracy in high dynamic application is analyzed.The influence of carrier loop bandwidth and observation frequency on Doppler error is analyzed.The velocity determination deviation under jerk is improved by increasing the loop bandwidth and updating the observation frequency.The accuracies of velocity determination under dynamic stresses of velocity,acceleration and jerk are tested by a self-developed high dynamic BDS receiver.The results show that the velocity determination accuracy of BDS receiver can be 0.05 m/s under 10 000 m/s velocity and 100 g acceleration,and 0.2 m/s under 50 g/s jerk after improvement.
high dynamic;velocity determination;jerk;BDS
10.3969/j.issn.1003-3106.2017.07.10
刘盟超,赵丙风,韩帅.高动态BDS接收机测速精度分析及改进措施[J].无线电工程,2017,47(7):42-46.[LIU Mengchao,ZHAO Bingfeng,HAN Shuai.Analysis and Improvement of Velocity Determination Accuracy of High Dynamic BDS Receiver[J].Radio Engineering,2017,47(7):42-46.]
2016-11-04
国家重点研发计划课题基金资助项目(2016YFB0502402)。
P228.4
A
1003-3106(2017)07-0042-05
刘盟超 男,(1985—),硕士,工程师。主要研究方向:卫星导航信号处理。
赵丙风 男,(1988—),硕士,助理工程师。主要研究方向:卫星导航信号处理。
猜你喜欢
测控技术(2018年6期)2018-11-25 09:50:18
电子制作(2018年19期)2018-11-14 02:36:40
上海公路(2018年4期)2018-03-21 05:57:46
电子制作(2016年1期)2016-11-07 08:42:41
系统工程与电子技术(2016年4期)2016-08-24 07:46:04
西部广播电视(2015年10期)2016-01-18 04:01:45
电测与仪表(2014年15期)2014-04-04 12:05:32
电测与仪表(2014年8期)2014-04-04 09:19:36
现代防御技术(2014年6期)2014-02-28 18:26:27
铁路通信信号工程技术(2014年6期)2014-02-28 16:58:50