深水卡爪连接器防松机构研究及试验分析
2017-06-19 19:00运飞宏王立权刘军刘通王仁华贾鹏
哈尔滨工程大学学报 2017年5期
运飞宏,王立权,刘军,刘通,王仁华,贾鹏
(哈尔滨工程大学 机电工程学院,黑龙江 哈尔滨 150001)
深水卡爪连接器防松机构研究及试验分析
运飞宏,王立权,刘军,刘通,王仁华,贾鹏
(哈尔滨工程大学 机电工程学院,黑龙江 哈尔滨 150001)
针对深水卡爪连接器在工作时受到外界环境干扰造成的松动问题,本文设计了新型非螺纹防松机构。根据深水卡爪连接器密封结构特点,对防松机构受力特性进行分析,找出影响锁紧效率的主要因素,确定了卡爪连接器防松机构2个锁紧配合的角度。对卡爪连接器密封结构力学进行受力分析,得出卡爪连接器对拉力载荷的承载能力,计算出防松机构增益系数及防松力。通过运动性能试验,验证了防松压块及解锁压块与防松滑块之间的运动关系;通过等效受载试验,验证了防松机构在外载下具有良好的防松性能。研制的防松机构已经在我国南海水下320 m进行了示范应用,有重要的理论意义和推广价值。
深水卡爪连接器;防松机构;非螺纹;锁紧效率;增益系数;解锁;防松性能;等效试验
由于陆地能源日渐枯竭,深海将会成为石油天然气等传统能源形式的主要供应区域[1]。深水卡爪连接器是海洋油气资源开采系统中广泛应用的设备之一,深水卡爪连接器工作在超过1 500 m的深海,不仅受到结构载荷的作用,还受到波浪、洋流等对跨接管冲击而造成的外载荷影响[2],因此良好的防松性能是其工作安全可靠的重要保证。
目前,国外一些石油工程公司的卡爪连接器防松技术已经成熟,例如FMC、OilStates以及Cameron等公司,而我国在这方面的研究较少。文献[3-4]是Cameron公司发明的卡爪连接器,文献[5]是Cooper Industries公司发明的卡爪连接器,这些卡爪连接器采用的防松结构均为螺纹连接,需要人在卡爪连接器的组装过程中进行螺纹拧紧的操作,从而实现防松的功能;由于人工操作只限于浅水,因此这种防松方式仅限于近海管道连接。文献[6-7]是分别为Hughes Tool和Vetco Gray公司发明的卡爪连接器,采用的是液压防松,这种防松方式需要液压缸长期工作在海底,造价高、可靠性低。李志刚等发明了一种螺纹传动防松机构,这种防松方式结构简单,但需要无人遥控潜水器(remote operated vehicle,ROV)在水下与操作接口精确对准进行操作;由于深水能见度低,不方便ROV观测,实现精确对准需要较长时间,增加了深水卡爪连接器安装难度,安装效率较低[8]。
针对深水卡爪连接器密封原理,本文设计了一种新型非螺纹传动防松机构,并对其受力特性进行分析,得出影响其锁紧效率的关键参数;通过卡爪连接器可承受的最大拉力载荷验证防松机构的锁紧性能,并通过试验对其进行运动性能及防松性能的验证。
1 深水卡爪连接器构成
如图1所示,深水卡爪连接器由底座下接头和卡爪上接头组成。底座下接头结构简单,主要作用是将下法兰固定在水下生产设施上。卡爪上接头结构较为复杂,主要包含上法兰、驱动环、密封圈、卡爪等密封核心部件,以及防松机构[9-11]。

图1 深水卡爪连接器Fig.1 Deepwater collet connector
进行水下作业时,深水卡爪连接器安装工具携带卡爪上接头下放,与底座下接头完成对接后,安装工具对驱动环进行加载,驱动环向下运动带动卡爪张开,卡爪抱紧上、下法兰后,安装工具上的防松液压缸对2个防松机构进行加载,加载完成后安装工具撤离,深水卡爪连接器完成安装。深水卡爪连接器的密封核心部件由上、下法兰与密封圈组成,上下法兰压紧密封圈实现密封。依靠驱动环内壁与卡爪背部摩擦自锁以及防松机构锁紧力保证卡爪连接器在外载荷下的可靠性[12]。
2 卡爪连接器防松原理
2.1 卡爪连接器防松机构设计
传统螺纹式防松机构依靠拧紧螺纹传动机构实现防松,设计的新型防松机构依靠由防松压块、防松滑块和防松柱组成的两道自锁结构配合实现防松。如图1、2所示,防松机构箱体安装在卡爪接头顶盖上,防松柱固定在驱动环上。当防松压块被防松液压缸活塞杆加载时,连接防松压块和解锁压块的链条便将解锁压块提起,防松滑块两侧的滑动导向螺栓帽起到导向的作用,这时防松滑块便在防松压块的推动下向前运动,直到防松压块运动到底端,使防松滑块便防松柱压紧。设计的防松滑块与箱体连接的方式是滑动副,为了减小机构的体积,防松滑块设计的十分紧凑,为了安装与定位,其滑动导向装置采用螺栓帽代替滑块。

图2 防松机构结构Fig.2 Structure of loose-proof mechanism
2.2 防松机构受力特性分析与自锁配合设计
深水卡爪连接器由驱动环施加在卡爪背部锥面的压力间接实现密封,驱动环仅需提供很小的摩擦力就能使密封结构保持密封状态,只有在受到干扰力时驱动环有向上运动趋势时,防松机构产生锁紧力。其受力状态如图3、4所示。

图3 有干扰力下自锁配合I受力分析Fig.3 Mechanical analysis of self-locking cooperation I under exciting force

图4 有干扰力下自锁配合II受力分析Fig.4 Mechanical analysis of self-locking cooperation II under exciting force
卡爪连接器受干扰力情况下,防松压块具有相对于防松滑块沿自锁斜面I斜向上的速度趋势。防松压块受到来自防松机构箱体锁紧摩擦力F1、防松机构箱体支反力Q1、摩擦力f21和支反力N1,其中f21和N1可合成防松滑块的作用力R1,自锁配合I摩擦角为φ1,斜面倾斜角度为λ1。假设防松压块斜向上速度为匀速运动,F1与R1力学关系为
F1=R1sin(λ1-φ1)
(1)
图4为自锁配合II受力分析图,防松滑块具有相对于防松柱沿自锁斜面II斜向下的速度趋势。防松滑块受到来自防松压块的作用力F2、防松机构
箱体支反力Q2以及来自防松柱的作用力R2,R2由摩擦力f32和支反力N2合成,自锁配合II摩擦角为φ2,斜面倾斜角度为λ2。假设防松压块斜向上速度为匀速运动,F2与R2力学关系为
(2)
式中:λ1为自锁配合I斜面角度;λ2为自锁配合II斜面角度;φ1为自锁配合I摩擦角,8°30′;φ2为自锁配合II摩擦角,8°30′。
F2与R1互为作用力反作用力,可得出F1与R2关系为
F1=R2sin(λ2-φ2)tan(λ1-φ1)
(3)
若无摩擦力作用,则理想锁紧力为
F0=R2sinλ2tanλ1
(4)
因此防松机构解锁效率为
(5)
只有在η1≤0时机构能够完成自锁。
图5为机构进行锁紧动作时自锁配合I与自锁配合II受力分析图。与上述分析同理,可以得出锁紧传动效率:
(6)

图5 锁紧时防松机构受力分析Fig.5 Mechanical analysis of the loose-proof mechanism in the locking state
防松机构不仅需要保证在受干扰力的情况下自锁即η1≤0,还需要确保在进行锁紧动作时传动效率η2≥0[13-15]。因防松机构结构限制,引入结构约束条件λ1+λ2≤50°。通过综合以上3个限制条件,可以得出λ1与λ2的取值范围如图6所示。根据卡爪连接器结构特性,选取λ1=20°,λ2=3°。
设计的防松滑块两侧有λ1=20°倾角,方便防松压块及解锁压块运动,同时不会发生自锁;防松滑块的底端是λ2=3°倾角,既可以保证防松滑块顺利的压到防松柱上,也可以保证在没有来自解锁块的作用时自锁;若驱动环因外界干扰的作用向防松机构施加作用力,由于防松滑块两侧的导向螺栓帽是卡在防松箱体里的,因此不仅不会发生移动,反而会压紧防松柱,起到防松作用。

图6 λ1、λ2取值范围Fig.6 Value ranges of λ1 and λ2
3 防松机构性能分析
跨接管因内部油气冲击,对卡爪连接器产生各种载荷,其中拉力载荷会使卡爪连接器驱动环具有向上解锁的趋势,此时防松机构起到主要的防松作用。但当此拉力载荷过大时,卡爪连接器密封结构会直接产生断裂破坏,密封结构失效。因此为验证防松机构锁紧性能,需判断卡爪连接器所能承受最大拉力载荷。
3.1 卡爪连接器承受最大拉力分析


图7 卡爪连接器密封部件受力分析Fig.7 Mechanical analysis of the sealing structure of the collet connector
由图7看出,拉力载荷经过上下法兰的传导直接作用在卡爪上,卡爪的强度直接决定连接器的最大承拉载荷。如图8所示,对于a-a截面,在工作状态下,由于外部拉力与密封轴向力Q01的共同作用,使得a-a环向截面的受力状态呈现拉伸——弯曲复合状态。根据叠加原理,a-a环向截面的当量应力应满足:
σoa=σma+σa≤[σz]t
(7)

(8)
式中:H0为力臂;D1为中性面直径;δ为单个卡爪旋转角度;n为周向卡爪数量,n=12;S1为厚度。
a-a环向截面的拉应力σa为[16]
(9)
式中:D0为外直径,mm;D2为内直径,mm。
通过计算a-a截面的所允许的当量应力,计算出卡爪连接器所允许的最大拉力载荷FL=238.7kN。

图8 卡爪危险截面Fig.8 Dangerous section of the collet
3.2 防松机构性能分析
根据前期研究知,卡爪连接器密封圈所需最小轴向预紧力Q0=39.7 kN[17]。将图7各部件受力分析简化,得到图9。由图9(a)上法兰所受各力关系可得
(10)
(11)
Q01=R01sin(α+ρ)
(12)
Q13=R13sin(β-ρ)
(13)
式中:α为法兰密封面锥角,20°;β为法兰锥颈倾角,30°;γ为卡爪背部倾角,3°;ρ为摩擦角,8°30′。
由图9(b)卡爪所受各力之间关系可得
(14)
(15)
Q23=R23sin(β-ρ)
(16)
由图9(c)下法兰所受各力之间关系可得
(17)
Q02=R02sin(α+ρ)
(18)
将计算出的最大拉力载荷FL=238.7kN代入式(10)~(18),可求得Q01=49.88kN,Q02=40.54kN,R34=R43=215.68kN。可见上法兰及下法兰对密封圈的轴向预紧力Q01与Q02均大于卡爪连接器密封圈所需最小轴向预紧力Q0=39.7kN,证明在极限拉力载荷作用下,密封并未失效。同时,
如图7所示,防松柱的竖直方向的力的平衡方程为
φ2-λ2)
(19)
由式(3)、(10)、(15)和(19)可以推导出最大拉力载荷与防松所需摩擦力的比值,即防松机构增益系数K:
[sin(2β-2ρ)sin(γ+ρ)tan(λ1-φ1)·

(20)
经过计算得出K=790.81,F1=0.31kN。说明当卡爪连接器在工作状态承受最大拉力载荷时,防松压块仅需提供很小的锁紧摩擦力就可以阻止驱动环的向上运动趋势,保证卡爪连接器的密封可靠性。

图9 密封元件间的受力关系简图Fig.9 Force relation figure between sealing components
4 卡爪连接器防松试验
4.1 防松机构运动测试试验
如图10所示,由专用的防松机构测试装置对其进行运动测试试验。防松液压缸及锁紧液压缸内置位移传感器,可测量防松压块、解锁压块的运动位移;测试装置内置接触式位移传感器,可测量防松滑块的运动位移。防松及解锁试验所得数据如图11所示。从图中可以看出,防松压块最大运动距离约为41.21 mm,防松滑块的位移与其基本成正比,初始由于接触不均匀的问题略有微小波动,防松滑块位移为5 mm以后,防松压块匀速移动。由于试验衔接比较紧凑,在解锁试验中,解锁压块与防松滑块的初始接触并无其他因素干扰,因此随着解锁压块的运动,防松滑块在整个解锁过程中均为匀速运动,并无波动,其最大位移也为41.21 mm。同时,从图中还可以看出,防松与解锁的运动过程是完全对称的,验证了防松机构设计的正确性。
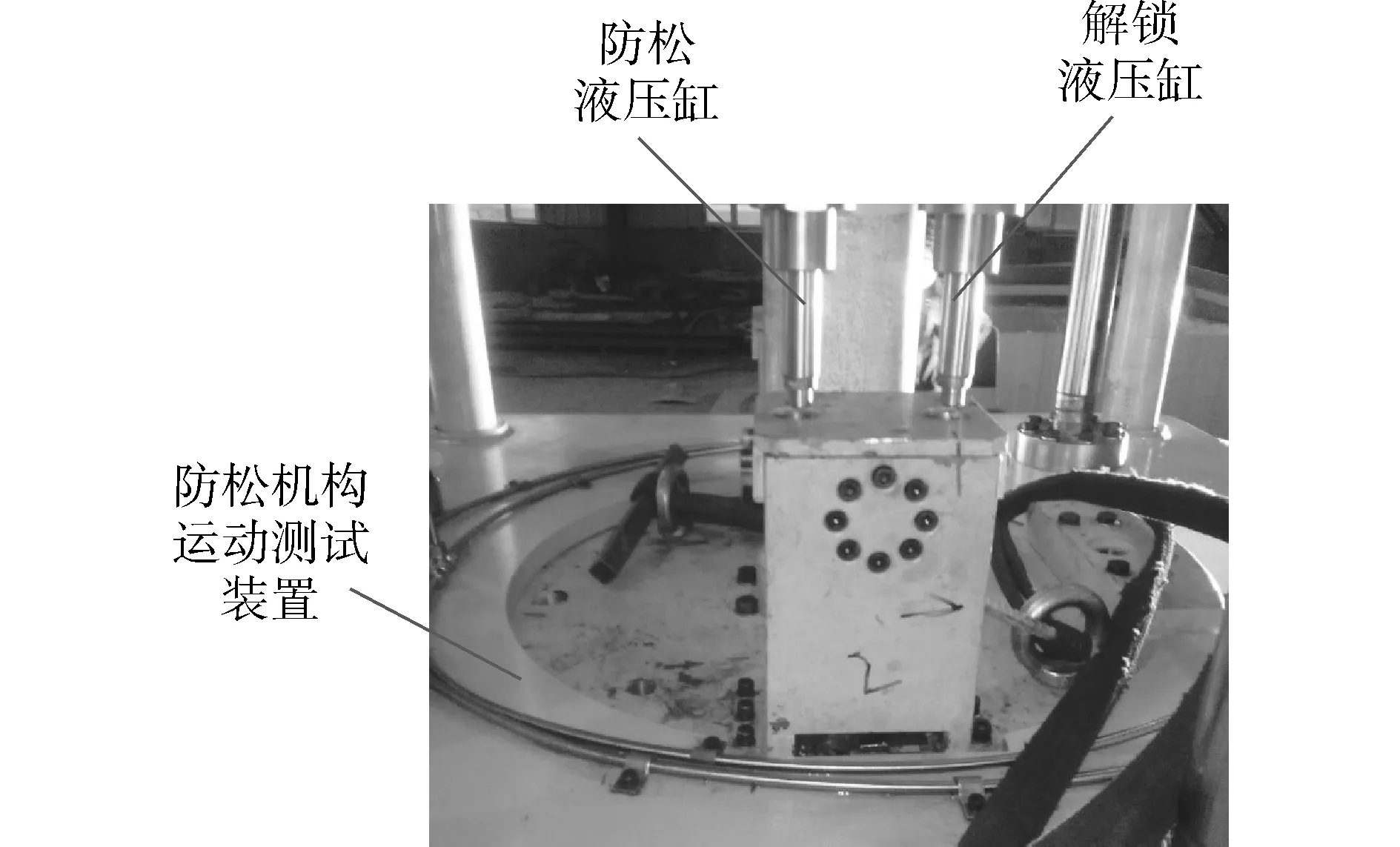
图10 防松机构运动测试装置Fig.10 Motion performance test equipment of the loose-proof mechanism
4.2 防松机构等效受载试验
第3节中分析出,防松机构在卡爪连接器承受拉力时起到重要的防松作用。卡爪连接器可承受的最大拉力为238.7 kN。如图12所示,使用卡爪连接器安装工具的加载环对卡爪上接头施加拉力,可等效于跨接管对连接器施加力。
通过调节系统工作压力从而调整加载环作用在卡爪上接头的力。试验从0 kN拉力开始加载,每次增加238.7 kN;每次施加拉力后,利用液压泵对卡爪连接器内部腔体注入高压油,直至连接器的额定工作压强34.5 MPa,保压1 h,记录保压后的压力值。同时,根据ISO 21329中对于内压测试的要求,需要测试34.5 MPa的1.5倍(51.75 MPa)[18],试验数据均记录在表1中。

图11 防松及解锁试验位移曲线Fig.11 Displacement curves of locking and unlocking experiment

图12 防松机构等效受载试验装置Fig.12 Equipment of the experiment of equivalent load of the loose-proof mechanism
Table 1 Data of the experiment of equivalent load of the loose-proof mechanism

拉力载荷/238.7kN34.5MPa保压值/MPa51.8MPa保压值/MPa034.551.810%34.551.820%34.551.830%34.551.840%34.551.850%34.551.860%34.551.870%34.551.880%34.551.890%34.551.8100%34.551.8
由于51.75 MPa在测量表中不容易读出,因此使用51.8 MPa代替。如表1所示,34.5 MPa及51.8 MPa内压时,从最大拉力的10%开始至100%,均无压降,符合验收准则。
5 结论
1)通过对防松机构的受力特性进行分析,得到能够抵抗干扰力的2组自锁配合面的角度取值范围,并根据卡爪连接器结构特性选取防松机构2个锁紧配合的角度:λ1=20°、λ2=3°。
2)对处于工作状态和拉力载荷作用下的卡爪连接器进行了受力分析,得到各密封部件间力的传导关系,并计算出卡爪连接器可承受的最大拉力载荷:FL=238.7 kN;以最大拉力载荷为干扰,推导出防松机构的增益系数:K=790.81,最大拉力所需的防松力:F1=0.31 kN。
3)通过卡爪连接器的防松机构运动性能试验,测试出防松压块及解锁压块的最大运动距离约为41.21 mm,且两种压块的位移与防松滑块的位移成正比,同时,防松压块与解锁压块的运动过程完全对称;通过防松机构等效受载试验,验证了防松机构在卡爪连接器可承受的最大拉力238.7 kN下,有良好的防松性能,可以保证卡爪连接器在34.5 MPa及51.8 MPa时均有着良好的密封性能。
研制的深水卡爪连接器防松机构已经在我国南海320 m水深进行了示范应用,并取得了成功。由于其具有良好的防松性能,也可以广泛应用于其他类型的水下连接器防松机构。
[1]刘少军,刘畅,戴瑜.深海采矿装备研发的现状与进展[J].机械工程学报, 2014, 50(02): 8-18.
LIU Shaojun, LIU Chang, DAI Yu. Status and progress on researches and developmentsof deep ocean mining equipments[J]. Journal of mechanical engineering, 2014, 50(02): 8-18.
[2]OMIYA Y, SAWA T. Thermal stress analysis and the sealing performance evaluation of bolted flange connection at elevated temperature[C]// Pressure Vessels and Piping Conference of the American-Society-of-Mechanical-Engineers. Prague, New York, 2009: 397-408.
[3]RONALD P, THOMAS S. Collet connector: USA, 4693497[P]. Sep. 15, 1987.
[4]JIMMIE G. Flowline connector: USA, 4411317[P]. Oct. 25, 1983.
[5]ROBERT W, DAVID A, ARTHUR C. Collet actuated ball and socket connector: USA, 4477105[P]. Oct. 16, 1984.
[6]BRAIN S. Collet type connector: USA, 4984830[P]. Jan. 15, 1991.
[7]CHARLES J, EDWARD T. Hydraulic collet-type connector: USA, 4708376[P]. Nov. 24, 1987.
[8]李志刚,姜瑛,王立权,等.水下连接器的防松机构:中国, 2013103177846[P]. 2015.02.11.
LI Zhigang, JIANG Ying, WANG Liquan, et al. Loose-proof structure of the subsea connector: China, 2013103177846[P]. 2015.02.11.
[9]时黎霞,王立权.深水液压卡爪式法兰连接器的设计[J]. 长春理工大学学报:自然科学版, 2009, 32(4): 595-598.
SHI Lixia, WANG Liquan. Design on deepwater hydraulic collet connector[J]. Journal of Changchun University of Science and Technology:Natural Science Edition, 2009, 32(4): 595-598.
[10]李志刚,运飞宏,姜瑛,等.水下连接器密封性能分析及实验研究[J].哈尔滨工程大学学报,2015,36(3): 389-393.
LI Zhigang, YUN Feihong, JIANG Ying, et al. Analysis and experimental study of subsea connector′s seal performance[J]. Journal of Harbin Engineering University, 2015, 36(3): 389-393.
[11]ZHU Yanshun, LUO Xiaolan, DUAN Menglan, et al. Installation technology of deepwater vertical collet connector[C]//Natural Resources And Sustainable Development II. Stafa-Zurich, 2012: 1465-1470.
[12]彭飞,段梦兰,范嘉堃,等.深水连接器锁紧机构的设计及仿真[J]. 机械设计与制造, 2014, (01): 37-39.
PENG Fei, DUAN Menglan, FAN Jiakun, et al. Design and simulation of the locking mechanism for deep-water connector[J]. Machinery design & manufacture, 2014, (01): 37-39.
[13]严宏志,杨兵,胡魁贤,等.不同摩擦条件对强制连续约束型离合器工作性能的影响[J].机械工程学报,2010,46(17): 86-92.
YAN Hongzhi, YANG Bing, HU Kuixian, et al. Working performance analysis of positive-continuous-engagement type clutch in different friction conditions[J]. Journal of mechanical engineering, 2010, 46(17): 86-92.
[14]刘厚云,赵望,陈超,等.高压巡线机器人夹持机构研制[J].仪器仪表学报,2014,35(6): 29-44.
LIU Houyun, ZHAO Wang, CHEN Chao, et al. Design of the gripper for power transmission lines inspection robot[J]. Chinese journal of scientific instrument, 2014, 35(6): 29-44.
[15]刘强,房建成,韩邦成.磁悬浮飞轮锁紧保护技术研究与发展现状[J].光学精密工程,2014,22(09): 2465-2475.
LIU Qiang, FANG Jiancheng, HAN Bangcheng. Research and development status of locking protection technologies for magnetic bearing flywheels[J]. Optics and precision engineering, 2014, 22(09): 2465-2475.
[16]中华人民共和国国家质量监督检验检疫总局,中国国家标准化管理委员会.GB 150.3-2011,压力容器[S].中国:中华人民共和国国家质量监督检验检疫总局,中国国家标准化管理委员会, 2011.
General Administration of Quality Supervision, Inspection and Quarantine of the People‘s Republic of China and Standardization Administration of the People′s Republic of China. GB 150.3-2011, Pressure vessels[S]. China: General Administration of Quality Supervision, Inspection and Quarantine of the People‘s Republic of China and Standardization Administration of the People′s Republic of China, 2011.
[17]赵勇.深水卡爪连接器密封结构特性及其性能试验研究[D].哈尔滨:哈尔滨工程大学,2015: 31-33.
ZHAO Yong. Characteristics and experimental research on performance of the seal structure of deepwater collet connector[D]. Harbin: Harbin Engineering University, 2015: 31-33.
[18]International organization for standardization. ISO 21329: 2004, Petroleum and natural gas industries—Pipeline transportation systems—Test procedures for mechanical connectors[S]. Switzerland: ISO copyright office, 2004.
本文引用格式:
运飞宏,王立权,刘军,等.深水卡爪连接器防松机构研究及试验分析[J]. 哈尔滨工程大学学报, 2017, 38(5): 771-777.
YUN Feihong, WANG Liquan, LIU Jun, et al.Research and experiment analysis on the loose-proof mechanism of the deepwater collet connector[J]. Journal of Harbin Engineering University, 2017, 38(5): 771-777.
Research and experiment analysis on the loose-proof mechanism of the deepwater collet connector
YUN Feihong, WANG Liquan, LIU Jun, LIU Tong, WANG Renhua, JIA Peng
(College of Mechanical and Electrical Engineering, Harbin Engineering University, Harbin 150001, China)
A new type of non-thread locking mechanism was designed to resist the loosening that occurs when external forces act on the deep-water collet connector. Due to the characteristics of the sealed structure of the deep-water collet connector, mechanical characteristics of the locking mechanism were analyzed; the main factors influencing the efficiency of locking were found, and two locking matching angles of the locking mechanism were confirmed. Based on the mechanical analysis for the sealed structure of the deep-water collet connector, the tension bearing capacity of the connector was attained. In addition, the gain coefficient and the locking force of the mechanism were calculated. The kinematic relations between the locking block, unlocking block, and the locking sliding block were verified by an experiment on motion performance. By the experiment of equivalent load, the excellent locking performance of the loose-proof mechanism under the external applied load was validated. The locking mechanism was verified 320 m below the water surface in the South China Sea, which has important theoretical significance and popularization value.
deep-water collet connector; locking mechanism; non-thread; locking efficiency; gain coefficient; locking performance; equivalent test
2016-05-16.
日期:2017-04-26.
国家自然科学基金项目(51279042);国家自然科学基金青年科学基金项目(51305088).
运飞宏(1988-), 女,博士研究生; 王立权(1957-), 男, 教授,博士生导师.
运飞宏,E-mail: yfh88818@163.com.
10.11990/jheu.201605052
TE94
A
1006-7043(2017)05-0771-07
网络出版地址:http://www.cnki.net/kcms/detail/23.1390.u.20170426.1047.032.html
猜你喜欢
时代汽车(2023年2期)2023-02-11
汽车实用技术(2022年19期)2022-10-19
机械工程师(2022年4期)2022-04-28
汽车工艺师(2021年8期)2021-08-28
内江科技(2021年3期)2021-04-04
安徽工业大学学报(自然科学版)(2020年4期)2020-12-26
机械制造与自动化(2020年3期)2020-07-16
当代陕西(2019年8期)2019-05-09
能源(2016年11期)2016-05-17
中国卫生(2015年1期)2015-11-16