
应用型人才创新能力培养的研究与实践
2017-06-05 05:34李朱锋徐媛媛
课程教育研究·上 2017年16期
李朱锋 徐媛媛


【摘要】在现代教育的背景下,企业对创新型人才的要求不断提高,高校应加强对应用型人才的创新能力的培养,本文阐述了应用型人才的创新能力培养的特征与意义,并且在创新能力培养的教学实践中结合了江苏省大学生创新训练计划项目,通过搭建慧鱼模型机器人为示范,将学生所学的理论知识与实际操作进行了融合,提高了学生对理论知识的应用能力和创新实践能力,为应用型本科人才的创新能力培养提供范式和借鉴。
【关键词】应用型人才 创新能力 培养 教学实践 慧鱼
【中图分类号】G642.0 【文献标识码】A 【文章编号】2095-3089(2017)16-0001-01
在“中国制造2025”和“工业4.0”的大时代背景下,企业对人才需求量和创新型人才的要求不断提高,为了适应新的形势要求,高校必须以不断加强知识创新培养逐步取代过去单一以传授旧有知识为主的教育培养模式,建立大学生创新能力发展的良好环境,不断提升应用型人才的创新与实践能力,使其成为企业发展所需要的创新人才。[1-3]
1.应用型人才创新能力培养的特征与意义
本科层次的应用型人才的培养是一种介于学术型人才与技能型人才之间的复合人才培养模式,这种人才培养模式既不同于理论基础丰厚的学术型人才的培养,又与职业技能型人才的培养存在一定差距[4]。所以对本科层次的应用型人才的培养需要制定完整的培养方案,实现培养直接面对企业服务的应用型人才的目的,而创新能力的培养则是最为直接和根本的目的。其培养的特征有两个方面的内容,一是本科阶段人才培养基础知识更加扎实,学生的学习与动手能力都有所提高,另一方面学生在通过本科阶段的学习后对自己未来的发展有了一定的定位,更希望老师能够针对其创新行为的指导,而老师在授课中应结合学生的实际情况,积极调动学生的主动性,提高其创新能力。
2.应用型人才创新能力培养的实践
在创新能力培养的教学研究与实践中结合江苏省的大学生创新训练计划项目,设计了一种基于慧鱼模型搭建的全自动机器人,该机器人能够实现一定的动作和功能,主要包括行走、除雪和转向功能。具体创新能力培养的实践教学过程如下:
2.1搭建慧鱼模型机器人整体设计
老师将整体的设计要求与思路布置给学生,让学生根据设计要求,将主要的工作原理结合机械原理与设计课堂中所学的理论知识进行分析,利用UG三维软件初步建立模型,然后通过慧鱼模块搭建模型,再用软件编程控制运动,实现除雪机器人的扫雪功能。
通过具体分析得出慧鱼机器人主要实现以下三大功能:
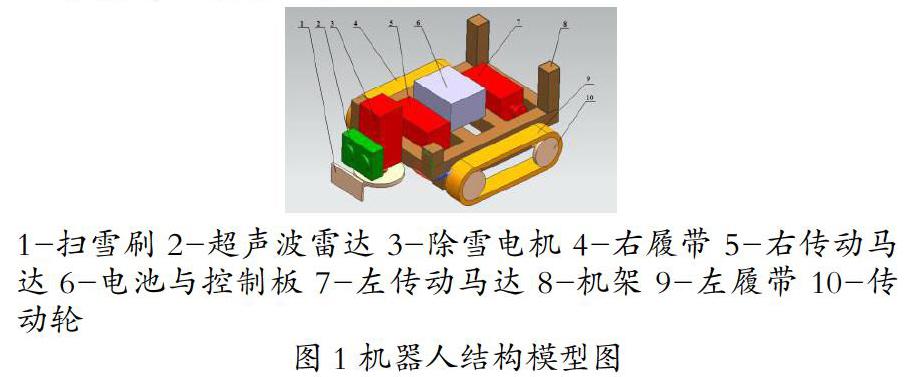
(1)行走功能主要通过两个主动马达和齿轮传动实现左右两侧的轮子转动,并且利用履带式传动机构。
(2)除雪功能依靠前端的转动马达带动悬臂转动来实现。
(3)转向功能是根据前端的超声波传感器以探测前方障碍物的距离,从而调整两个主动马达的转速与方向实现转向功能。
2.2結构设计
利用UG三维软件按照上述三大功能对除雪机器人进行三维建模,结构图如图1所示
2.3软件编程
为了实现全自动化的运动,则需要程序来控制机器人,根据其实现的运动利用ROBO Pro编程软件进行编程,主要包括行走与转向程序和除雪程序两部分。如图2和3所示。然后把所编的程序输入到慧鱼控制器中。
2.4总装与调试
最后利用慧鱼模块搭建机器人,如下图4所示。系统的总体调试主要包括对运动部件的检查,保证转动灵活、没有干涉和卡死现象;电机进行通电检查;控制模块与运动机构的接口连接是否完整。最终通过的试验能够实现预定的功能。
三、实践经验总结
在本次机器人设计与制作的教学实践中,调动学生的主动性和积极性,把他们平时所学的机构运动学、三维建模和软件编程等相关理论知识进行融合,提高学生对理论知识的应用能力,同时结合了慧鱼模型的平台,给予学生动手实践的机会,保证学生的创新能力能够有效发挥。
参考文献:
[1]庞永师,林昭雄,陈德豪,孟强,郭成.应用型人才创新能力培养模式探索[J].高等工程教育研究,2008,(02):145-148.
[2]王晖,林平健.工科院校培养应用型人才创新能力的思考[J].江苏高教,2003,(01):49-51.
[3]刘国买.应用型人才综合素质和创新能力培养的探讨[J].中国大学教学,2009,(07):73-76.
[4]徐媛媛.基于应用型人才创新能力培养的探索与实践[J].知识文库,2017,(02):224.
作者简介:
李朱锋(1989-),男,硕士,南通理工学院讲师,研究方向:应用型人才创新能力培养、工程力学。
猜你喜欢
中学生学习报(2022年13期)2022-04-16
中学生学习报(2022年14期)2022-04-15
文教资料(2016年19期)2016-11-07
科技视界(2016年21期)2016-10-17
考试周刊(2016年79期)2016-10-13
考试周刊(2016年79期)2016-10-13
考试周刊(2016年79期)2016-10-13
考试周刊(2016年77期)2016-10-09
大学教育(2016年9期)2016-10-09
大学教育(2016年9期)2016-10-09