
考虑滞站调度的有轨电车信号优先控制策略研究
2017-06-05 14:18朱从坤
苏州科技大学学报(工程技术版) 2017年2期
陈 飞,朱从坤
(苏州科技大学 土木工程学院,江苏 苏州215011)
考虑滞站调度的有轨电车信号优先控制策略研究
陈 飞,朱从坤
(苏州科技大学 土木工程学院,江苏 苏州215011)
在有轨电车主动式信号优先控制系统的基础上,提出站台控制方式(即刻离站或滞站调度)与交叉口信号优先控制方式(绿灯提前、绿灯延长、相位插入等)组合的控制策略。并建立以整体延误损耗为基础的交叉口效益函数,分析比较各组合控制策略与滞站调度控制策略效益值的大小,选择效益最优的有轨电车优先控制策略。最后针对组合控制策略在交叉口进行实例应用。该组合控制策略在保证有轨电车优先权的同时,也降低了其在站台的停靠时间这一不确定因素对调度系统和信号优先系统的影响。
有轨电车;信号优先;滞站调度;组合控制策略
有轨电车信号优先控制系统和站台控制系统是保障其运营效率的主要控制方法。目前,研究较多的主要集中在有轨电车信号优先控制方面,而站台控制模式的研究相对较少。李盛、杨晓光等学者考虑到有轨电车在交叉口与社会车辆混行的复杂性,提出了设置有轨电车专用信号灯,并考虑社会车辆和有轨电车两种信号控制的协调性,实现有轨电车在交叉口的优先通行[1]。钟吉林,王长林等研究了基于干线协调下的有轨电车信号优先配时,利用遗传算法优化干线道口之间的相位差,实现有轨电车道口信号相对优先控制[2]。在公共交通信号优先方面对站台控制模式的研究和应用较多。Alexander等学者通过优化交叉口的配时算法来判断是否给予公交车辆优先权[3]。Luiz等学者基于交叉口总体的延误损失,考虑到公交车辆离开站台的方式,并分析了这一离站方式下车辆信号优先的控制方法,阐明了主动控制下离开站台的优势[4]。
纵观国内外的文献,有轨电车的信号优先,多是在干线协调下的优化配时或单点信号优先控制的前提下,采用主动优先、被动优先或实时优先的方式实现的。文中在主动式优先控制基础上,考虑有轨电车从站台行驶到交叉口这一时间段,将有轨电车的站台控制模式和交叉口的信号优先控制策略结合起来,提出一种基于信号优先和滞站调度组合的控制策略。该组合控制策略将有轨电车的离站时间作为决策点,依据交叉口的整体效益函数对组合的方式进行比较选择,从而确定有轨电车的离站时刻和离站方式以及交叉口的信号优先控制策略。
1 信控交叉口的延误模型
假设交叉口各进口道车辆的到达遵循基于历史道路交通量数据统计而获得的连续平均到达率[5]。且在一个信号周期内,进口道的到达车辆数明显小于其最大可放行车辆数,交叉口处于未饱和状态。各进口道的车辆平均到达率与通行能力在整个周期内稳定不变,每次绿灯结束时进口道排队车辆都得以清空。当不计信号损失时间以及黄灯时间时,进口道的车辆到达与驶离情况可简化为图1所示。可依据Webster的均衡相位平均延误模型[6],求得交叉口总的延误时间等于三角形OAB的面积。

式中,Di为交叉口相位i的总延误时间,s·veh;Ri为信号相位i的红灯时间,s;qij为信号相位i进口道j的车辆到达率,veh/s;sij为信号相位i进口道j的饱和流率,veh/s;mi为信号相位i的进口道数。
考虑到有轨电车优先等级和客载量远远大于路面其他社会车辆,以交叉口所有车辆总延误时间对应的人员费用损耗为指标,建立效益函数[7]:

式中,TD为交叉口总的延误损失费用(¥/veh);Dt为有轨电车的延误时间(s);Pc为社会车辆的平均车载人数(p/veh);Pt为有轨电车的车载人数p/veh);Cc为社会车辆中人均单位时间损失费用(¥/s/p);Ct为有轨电车中人均单位时间损失费用(¥/s/p)。

图1 非饱和流的交叉口延误分析
2 考虑滞站调度的有轨电车信号优先组合控制策略
在上述交叉口延误模型的基础上,以延误变化和有轨电车离站时间(滞站调度)为决策变量,可将组合控制策略分为以下几种:(1)有轨电车滞站调度;(2)有轨电车即刻离站+绿灯延长;(3)有轨电车即刻离站+相位插入;(4)有轨电车即刻离站+相位转换;(5)有轨电车即刻离站+绿灯提前;(6)有轨电车即刻离站。
2.1 有轨电车滞站调度(情形一)
当有轨电车到达交叉口时,在原有的信号配时下无法通过,故选择有轨电车滞站调度的控制策略。滞站的时间可以增加乘客的上下车时间,同时,对于不符合既定时刻表运营的有轨电车,可以纠正其离站时间,提高服务水平[8]。有轨电车滞站调度的延误损失函数TD1为

式中,ta为有轨电车到达交叉口的时刻(以其相位红灯开始时刻为ta的0时刻)。
2.2 有轨电车即刻离站+绿灯延长(情形二)
绿灯延长是指当有轨电车在绿灯末期或红灯初期到达,在正常信号下无法通过交叉口时,延长该方向绿灯信号时间。
图2和图3所示为延长绿灯时间时对有轨电车优先相位和冲突相位的影响。绿灯时间的延长使其他车辆降低的延误值为图2中阴影部分的面积:

有轨电车减少的延误值则为

式中,t'为有轨电车的制动延误;当有轨电车到达交叉口时刻为绿灯时,ta取负值。

图2 绿灯延长对有轨电车优先相位的延误影响
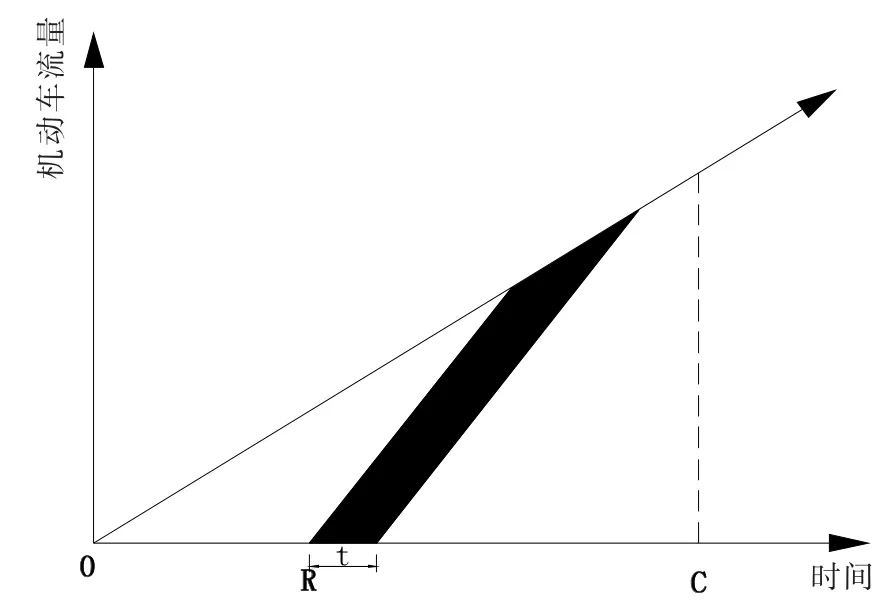
图3 绿灯延长对有轨电车冲突相位的延误影响
冲突相位的红灯时间增长,冲突相位车辆增加的延误为图3中阴影部分的面积:

(4)、(5)、(6)式中,t为优先相位延长的绿灯时间,s;Ry为优先相位y的红灯时间,s;Rb为冲突相位b的红灯时间,s;ρij为qij/sij的值。
故绿灯延长时,延误损失的函数TD2为

当TD2<TD1时,采用即刻离站+绿灯时间延长控制,绿灯延长的时间为t;当TD2>TD1时,采用滞站调度方式,滞站的时间即为Ry-ta。
2.3 有轨电车即刻离站+相位插入(情形三)
相位插入的控制方式是指检测到有轨电车在相位的红灯时间段中部抵达交叉口时,为保证有轨电车的优先通行而在当前相位中直接插入绿灯信号。
相位插入后优先相位社会车辆的延误减少值为图4中阴影部分的面积:


图4 优先相位插入绿灯信号对优先相位的延误影响
式中,t为优先相位插入的绿灯时间,s。
有轨电车的延误减少值为

针对一个四相位信控交叉口,在有轨电车优先相位中插入绿灯信号时,对冲突相位的影响如图5所示。插入绿灯时间t,直接导致了有轨电车冲突相位和的绿灯损失时间t1和t2,其中t=t1+t2。

图5 优先相位红灯期间插入绿灯对冲突相位的影响
对于冲突相位b1,车辆增加的延误值为图6中阴影部分的面积:

对于冲突相位,车辆增加的延误值为图7中阴影部分的面积:

故当在有轨电车优先相位的红灯中部插入绿灯时间时的延误损失函数TD3为

当TD3<TD1时,采用即刻离站+插入绿灯时间的控制策略,插入的绿灯信号时长为t;当TD3>TD1时,采用滞站调度方式,滞站的时间即为Ry-ta。

图6 相位插入对冲突相位的延误影响分析

图7 相位插入对冲突相位的延误影响分析
2.4 有轨电车即刻离站+相位旋转(情形四)
相位旋转是当有轨电车到达交叉口的时间处于优先相位红灯时间段的中前部时,此时将有轨电车优先相位与其下一个冲突相位信号时间转换过来,使得优先相位能够借助其下一个冲突相位的绿灯时间让有轨电车优先通过。
相位旋转时优先相位社会车辆的延误减少值为图8中阴影部分的面积:

式中,tr为冲突相位绿灯的开始时刻;t为冲突相位的绿灯时间,s。
有轨电车的延误减少值为

相位旋转时冲突相位社会车辆的延误增加值为图9中阴影部分的面积:

故采用相位旋转后交叉口的延误损失函数为

当TD4<TD1时,有轨电车采用即刻离站+相位旋转的控制方式;当TD4>TD1时,有轨电车采用滞站调度方式,滞站的时间即为Ry-ta。

图8 相位旋转对优先相位的延误影响
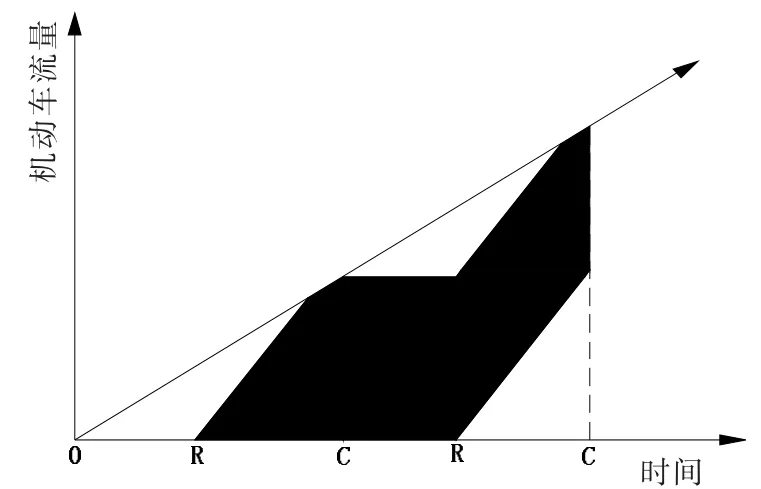
图9 相位旋转对冲突相位的延误影响
2.5 有轨电车即刻离站+绿灯提前(情形五)
绿灯启亮提前是指当检测到有轨电车在优先相位的红灯末期抵达时,则提前结束冲突相位的绿灯信号,给予有轨电车相位通行信号。
绿灯提前时优先相位延误的减少值为图10中阴影部分的面积:

有轨电车延误的减少值为
绿灯提前时冲突相位增加的延误值为图11中阴影部分的面积:

故绿灯提前交叉口的延误损失函数为

当TD5<TD1时,有轨电车采用即刻离站+绿灯提前启亮的控制策略,提前的时间为t;当TD5>TD1时,有轨电车采用滞站调度方式,滞站的时间即为Ry-ta。

图10 绿灯提前启亮对优先相位的延误影响

图11 绿灯提前启亮对冲突相位的延误影响
2.6 有轨电车即刻离站(情形六)
当ta∈(R,C),即有轨电车正好在优先相位的绿灯信号时间内到达交叉口,考虑到有轨电车自身的长度It和交叉口宽度Iw,其安全的通过交叉口需满足:

该情形下,有轨电车到达交叉口的时刻ta∈[R,C-(It+Iw)/v]时,即刻离站。但当ta∈[C-(It+Iw)/v,C]时,无法保证有轨电车通过交叉口时不对其冲突相位的车辆造成影响,将此情况归纳到情形一考虑,采用即刻离站+绿灯信号延长的控制策略。
3 案例应用
以苏州市有轨电车一号线何山路与金枫路交叉口为例,对有轨电车优先控制的方式选择进行实例应用。交叉口的效益函数参数见表1,各进口道流量及车道功能划分见图12。

表1 交叉口整体延误的效益函数参数表

图12 交叉口渠化及交通流量示意图
将前述所有模型,利用Fortran语言编程计算,将有轨电车所有到达交叉口的可能时刻循环迭代到模型中,得出不同模型的大小并进行比较。根据有轨电车自身的长度It和交叉口宽度Iw,为了使有轨电车不影响其冲突相位的车流安全的通过交叉口,所需要的最小时间为t=(It+Iw)/v≈14 s。同时为减少对交叉口其他相位社会车辆通行的干扰,一般改变的绿灯时长不超过红灯时长的20%[9-10],且各相位均满足最小绿灯时间。文中取改变的绿灯时长t∈[0,20]。以优先相位红灯初始时刻为0,在四相位信号配时下采取组合控制策略的时间划分见图13,结果分析如下(见表2):
(1)当ta∈[0,20]时,即有轨电车在此区间的任意时刻到达交叉口,绿灯延长的时间t∈[0,20],均有TD2<TD1。考虑有轨电车安全通过交叉口的14 s,即ta∈[0,6]时采用即刻离站+绿灯延长的控制策略(但当ta=6 s时,绿灯延长的时间t≥14 s);ta∈[7,20]时采取滞站调度策略。
(2)当ta∈[13,42]时,即有轨电车在此区间的任意时刻到达交叉口,总有满足t1∈[0,20]、t2∈[0,9]时,14≤t1+t2≤20,使得TD3<TD1。考虑有轨电车安全通过交叉口的14 s,即当ta∈[13,28]时采用即刻离站+相位插入的控制策略;ta∈[29,42]时采取滞站调度策略。
(3)当ta∈[33,66]时,有轨电车在此区间上的任意时刻到达交叉口时,当采用即刻离站+相位旋转的控制策略,均是TD4>TD1,即有轨电车采取滞站调度策略。
(4)当ta∈[83,103]时,有轨电车在此区间内的任意时刻到达交叉口,和绿灯提前时间t∈[0,20],均有满足14≤t+ts≤20的组合(ts为红灯的剩余时间,即ts=Ry-ta,使得TD5<TD1。即采用有轨电车即刻离站+绿灯提前的控制策略。
(5)当ta∈[104,135]时,有轨电车到达交叉口的时刻刚好处于优先相位的绿灯时间,无需等待和改变信号配时,考虑有轨电车安全通过交叉口的14 s,ta∈[104,121]时采用即刻离站控制策略;ta∈[122,135]时采取即刻离站+绿灯延长控制策略,同情形一。

图13 四相位信号配时下组合控制策略时间划分示意图

表2 有轨电车在交叉口信号区间内组合策略的选择
4 结语
该文将有轨电车的站台控制方式(即刻离站、滞站调度)与其交叉口信号优先控制方式(绿灯提前、绿灯延长、相位插入、相位旋转)结合起来,对于任意时刻到达交叉口的有轨电车,选择交叉口延误损失最小的组合控制策略。并运用实例交叉口的数据进行了验证。结果表明,组合控制策略不仅给予了有轨电车优先权,也将交叉口整体的延误损失降至最低。同时也降低了有轨电车在站台的停靠时间这一不确定因素对有轨电车调度系统和信号优先系统的影响。
[1]李盛,杨晓光.现代有轨电车与道路交通的协调控制方法叨[J].城市轨道交通研究,2006,8(4):43-46.
[2]钟吉林,王长林.有轨电车道口信号优先设计[J].计算机与通信信号,2014,23(9):48-52.
[3]LIU Hongchao,ALEXANDER S,ZHANG Weibin.A dynamic model for adaptive bus signal priority[M].Washington DC:TRB,National Research Council,2003.
[4]LUIZ A K,WEMER K J.Simultaneous control of traffic lights and bus departure for priority operation[J].Transportation Research Part C,2010(18):288.
[5]LIN G S,LIANG P,SCHONFELD P.Adaptivecontrol of transit operations[R].US Department of Transportation,Federal Transit Administration,1995.
[6]陈俊,徐良杰,朱顺应.交通管理与控制[M].北京:人民交通出版社,2012.
[7]王宁,张利国,陈阳舟.基于信号优先和滞站调度的BRT组合控制策略[J].交通运输系统工程与信息,2011,11(3):144-150.
[8]ZOLFAGHARI S,AZIZI N,JABER M Y.A model forholdingstrategy in public transit systems with real-timeinformation[J].International Journal of Transport Management 2,2004,2(2):99-110.
[9]陆锡明.快速公交系统[M].上海:同济大学出版社,2005.
[10]王春梅.城市道路交叉口公交信号控制技术研究[D].长沙:湖南大学,2010.
Research on the tram signal priority control method considering the holding strategy
CHEN Fei,ZHU Congkun
(School of Civil Engineering,SUST,Suzhou 215011,China)
Based on the active signal priority control system,a combined control strategy based on the platform control mode(immediate departure or holding)and the intersection signal priority(early green,green extension, phase insertion,etc.)is established in this paper.And a benefit model with the total delay is proposed,the magnitude of the benefit value between the combined control strategy and the holding strategy for an optimum solution is compared.Finally,an example is given to make the tram get its priority,and the influence of the uncertainty of the tram's stop time is also reduced in scheduling system and signal priority system.
tram;signal priority;holding strategy;integrated control strategy
P315.9
:A
:2096-3270(2017)02-0031-06
(责任编辑:经朝明)
2017-03-23
陈 飞(1991-),男,安徽天长人,硕士研究生。
朱从坤(1968-),男,教授,从事交通运输规划与管理的研究,Email:zhucongkun1968@126.com。
猜你喜欢
作文周刊·小学一年级版(2020年40期)2020-10-19
商周刊(2018年25期)2019-01-08
传媒评论(2018年5期)2018-07-09
重庆交通大学学报(自然科学版)(2017年3期)2017-05-17
中国卫生(2016年12期)2016-11-23
娃娃乐园·3-7岁综合智能(2016年4期)2016-10-24
工程建设与设计(2016年8期)2016-03-11
中国房地产业(2016年2期)2016-03-01
系统工程学报(2015年3期)2015-02-28
小说月刊(2014年12期)2014-04-19
