基于扰动补偿的PMSM转速环自抗扰控制器设计
2017-05-30 06:14谢传林曾岳南王发良曾祥彩
微特电机 2017年12期
谢传林,曾岳南,王发良,曾祥彩
(广东工业大学,广州 510006)
0 引 言
自抗扰控制器(以下简称ADRC)作为应用于永磁同步电机(以下简称PMSM)控制中的一种非线性算法,能够对系统的内、外扰动进行估计并给予补偿,不依赖于对象模型[1]。扩张状态观测器(以下简称ESO)作为ADRC的核心部分,其观测精度越高,系统的控制性能越好。然而在系统实际运行中,ESO所估计的扰动量较多且变化幅度很大,使得ESO难以保证对扰动有较高的估计精度,导致扰动不能够完全补偿,影响了ADRC的控制性能。为此,国内外学者进行了大量的研究,文献[2]提出了基于负载观测的自抗扰控制器设计,但是扰动补偿范围较小。文献[3]提出了基于滑模控制的模型补偿自抗扰控制器设计,利用辨识算法估计出转动惯量和负载转矩,从而减轻了ESO的观测负担,但由于滑模控制开关的切换动作所造成的控制不连续性,抖振现象无法避免。
针对上述问题,本文设计了基于扰动补偿的ADRC。首先通过参数辨识的方法估计出转动惯量和负载转矩,把部分扰动项表示出来并补偿到ADRC的扰动观测输出中,减小ESO的观测负担,提高ESO对扰动量的观测精度,进而增加转速环抗扰性能。最后根据基于带宽的参数整定方法得到控制器参数,通过仿真和实验表明,转速环采用基于扰动补偿的ADRC与采用线性ADRC相比,抗扰性能更优越。
1 PMSM数学模型
对于表贴式PMSM在d-q旋转坐标系下的电压和磁链方程可以表示:
(1)
(2)
电磁转矩和运动方程:
(3)
(4)
式中:ud,uq分别为定子d,q轴电压;id,iq分别为定子d,q轴电流;L为定子电感;ψd,ψq分别为定子磁链d,q轴分量;ψf为转子磁链;ω为转子电角速度;ωr为转子机械角速度;Rs为定子电阻;p为电机的极对数;Te为电机的电磁转矩;TL为电机负载转矩;J为转动惯量;B为电机的摩擦系数。
2 转速环控制器的设计
2.1 基于扰动补偿的自抗扰控制器设计
线性自抗扰控制器(以下简称LADRC)具有参数整定方便、算法简单等优点,它包括线性跟踪微分器(以下简称LTD)、线性扩张状态观测器(以下简称LESO)以及线性状态误差反馈(以下简称LSEF)3个部分[4]。根据式(4)可知,转速输出为一阶微分方程,因此选取一阶LADRC作为转速环控制器[4]。通过转动惯量辨识和负载转矩观测得到部分扰动项,并将补偿到ADRC扰动估计输出项中,同时与LSEF对总扰动的补偿一起组成控制量,实现转速反馈对转速给定的跟随。
由式(3)、式(4)可得:
(5)

(6)
式中:b0为可变参数。可得:
(7)
式中:fω为总扰动量。令x1=ω,x2=fω,u=iq,式(6)可写为:
(8)
为了LESO设计方便,将式(8)写为:

(9)

为了得到扰动量的数值,由式(9)设计的LESO的方程:
(10)
式中:β1,β2表示LESO的增益;z1,z2表示状态量的观测值;x1表示状态量的实际值。
(11)
通过扰动补偿后,转速开环可由一个积分环节来表示。因此,选取比例控制作为控制律,即:
(12)

(13)


图1 转速环采用基于扰动补偿ADRC结构图
2.2 转动惯量的辨识
由于采样时间很小,可以得出:
(14)
式中:Ts为采样周期。
将式(14)代入到式(7)中,可得:
ωr(k)=ωr(k-1)+(Ts/J)·
[Te(k-1)-TL(k-1)]
(15)
由于机械负载转矩在两个采样时间内变化很小,可以看作恒定,因此对于式(15)中的负载转矩有:
TL(k)=TL(k-1)
(16)
由式(15)可得:
ωr(k-1)=ωr(k-2)+(Ts/J)·
[Te(k-2)-TL(k-2)]
(17)
联立式(15)、式(17)可得:
ωr(k)=2ωr(k-1)-ωr(k-2)+
b(k-1)U(k-1)
(18)
式中:U(k-1)=Te(k-1)-Te(k-2);b(k-1)=Ts/J。
将式(18)作为转动惯量辨识的参考模型,即:

(19)
利用梯度校正估计算法[5-6],可得:
(20)
由式(20)可以得到转动惯量的估计值:
(21)
2.3 负载转矩观测器的设计
由式(5)得:
(22)
由于负载转矩不易直接测量,可以通过已获得的iq,ω来观测。由于测量iq和ω时会有噪声误差的存在,使测量值不准确,因此为了得到精确的测量值,在负载转矩观测器的输出端加入一阶低通滤波器[7],加入滤波器后式(22)变为:
(23)
式中:T1为一阶低通滤波器的时间常数。
将式(23)进行拉氏变换并整理可得:
(24)

对A取拉氏反变换可得:
(25)
联立式(24)及式(25)可得:
(26)
3 仿 真
在MATLAB/Simulink平台上搭建转速环,采用基于扰动补偿的ADRC双闭环调速系统仿真模型,电机参数如表1所示,并和转速环采用LADRC的控制效果进行对比,其参数整定是基于转速环带宽指标[8],如表2所示。转速环参数可按表2给出的计算方法得到,其中:ωcv,ω0以及b0分别为200,1 000以及50。电流环均采用PI控制器,PI参数由工程整定方法可得[9]。
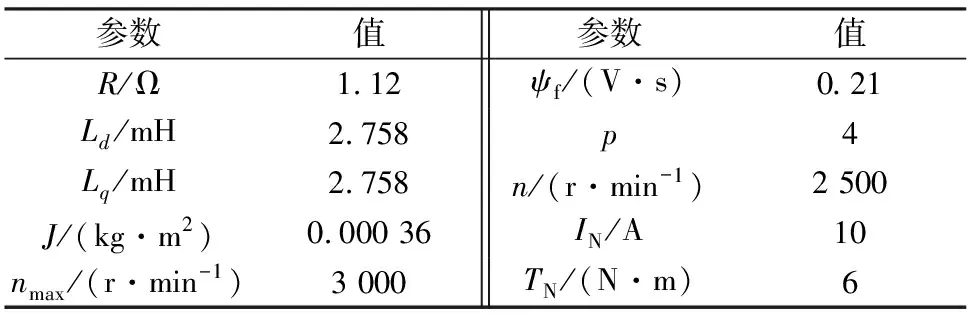
表1 伺服电机参数

表2 转速环一阶LADRC整定公式
表2中ωcv为转速闭环带宽;ω0为观测器带宽,取ω0=5ωcv~10ωcv;τ为LTD的惯性时间常数。
当转速给定1 000r/min,在0.5s时突加50%额定负载时,采用LADRC和基于扰动补偿的ADRC控制的系统转速响应如图2所示,观测器对扰动的跟踪波形如图3所示,系统总扰动量如图4所示。由图2、图3可知,采用基于扰动补偿的ADRC控制的系统在突加负载后,可以更快地恢复到稳态,转速跌落更小。而采用LADRC控制的系统在突加负载后,转速恢复时间更长,转速跌落也更大。
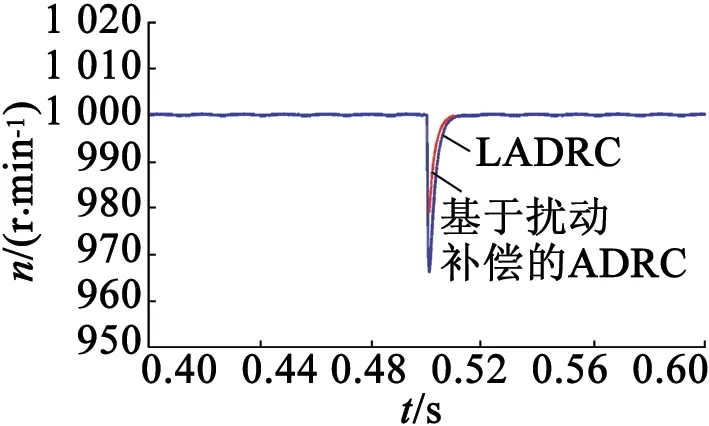
图2 突加负载时转速响应曲线

图3 扰动观测值对比
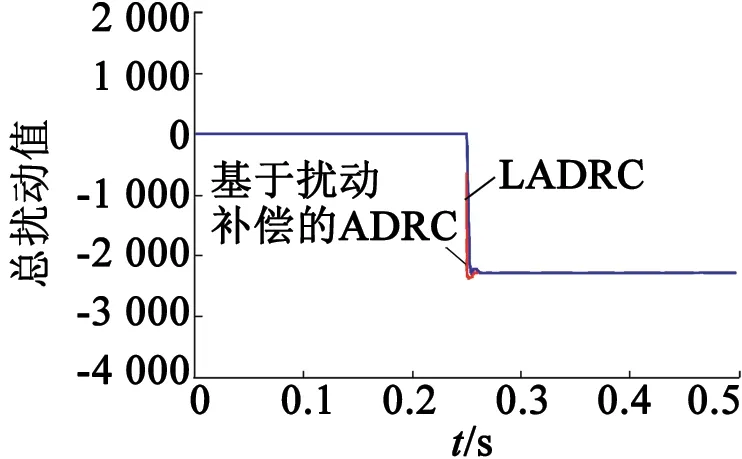
图4 总扰动对比
4 实 验
上述理论通过实验验证其有效性,实验中的参数设置条件与仿真参数相同。实验平台如图5所示。
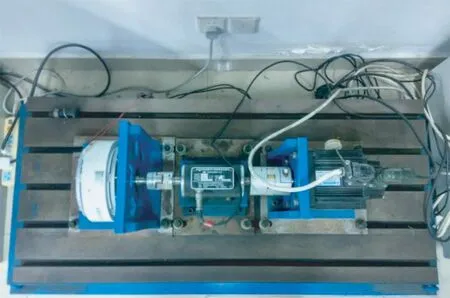
图5 加载实验平台
抗负载扰动性能实验:转速给定为1 000r/min,转速达稳态后突加50%额定负载,采用LADRC和基于扰动补偿的ADRC控制的系统的转速跌落如图6所示,由图6可知,在负载转矩扰动作用下,采用基于扰动补偿的ADRC控制的系统抗负载扰动效果优于采用LADRC控制的系统。
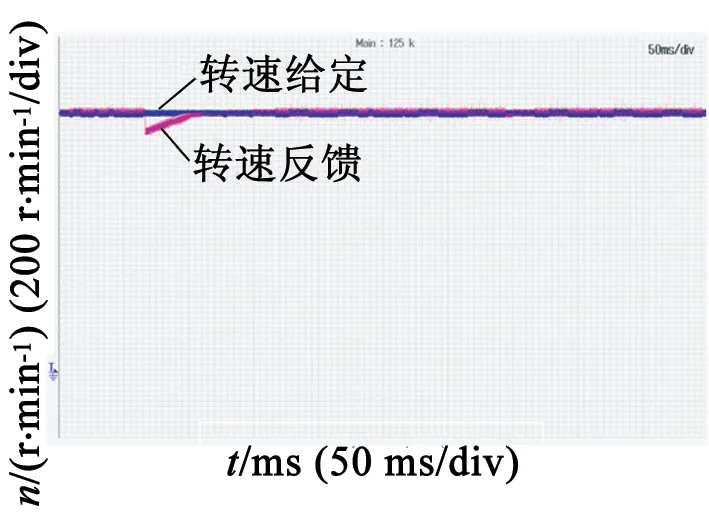
(a) 采用LADRC转速响应波形
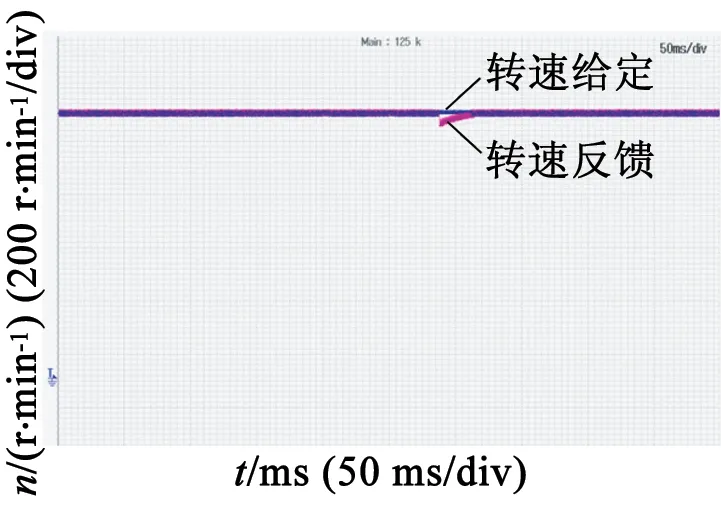
(b) 采用基于扰动补偿的ADRC
5 结 语
本文在线性自抗扰控制技术的基础上,辨识了负载转矩以及转动惯量,设计了基于扰动补偿的ADRC,并将其应用于PMSM转速环控制。仿真和实验表明,基于扰动补偿的ADRC有效减小了观测器的观测负担,提高了扰动估计精度,具有更好的抗负载扰动能力,有效抑制负载变化对转速的影响。
[1]HANJQ.FromPIDtoactivedisturbancerejectioncontrol[J].IEEETransactionsonIndustrialElectronics,2009,56(3):900-906.
[2] 盖江涛,黄守道.基于负载观测的永磁电机驱动系统自抗扰控制[J].电工技术学报,2016,31(18):29-36.
[3]CHENHJ,XUH,LIUB,etal.ThecompensatedactivedisturbancerejectioncontrollerbasedonslidingmodecontrolforPMSM[C]//The5thAnnualIEEEInternationalConferenceonCyberTechnology,2015:240-245.
[4] 曾岳南,曾祥彩.永磁同步电机调速系统自抗扰控制器的设计[J].电气传动,2017(4):3-6.
[5] 沈艳霞,刘永钦.基于改进型模型参考自适应的PMSM参数辨识[J].电气传动,2009,39(5):47-50.
[6] 章玮,王伟颖.基于降阶负载扰动观测器的永磁同步电机控制[J].机电工程,2012,39(7):821-832.
[7] 刘志刚,李世华.基于永磁同步电机模型辨识与补偿的自抗扰控制器[J].中国电机工程学报,2008,28(24):118-123.
[8]GAOZQ.Scalingandbandwidth-parameterizationbasedcontrollertuning[C]//ProceedingsoftheAmericanControlConference.Denver:IEEE,2003:4989-4996.
[9] 阮毅,陈伯时.电力拖动自动控制系统-运动控制系统[M].4版.北京:机械工业出版社,2012.
猜你喜欢
数学物理学报(2022年4期)2022-08-22
数学物理学报(2021年4期)2021-08-30
北京航空航天大学学报(2021年7期)2021-08-13
防爆电机(2021年3期)2021-07-21
防爆电机(2020年4期)2020-12-14
北京航空航天大学学报(2020年10期)2020-11-14
四川工商学院学术新视野(2020年2期)2020-08-13
数学物理学报(2019年4期)2019-10-10
物理与工程(2019年2期)2019-07-09
北京航空航天大学学报(2017年6期)2017-11-23