基于自动Petri网的联锁逻辑设计*
2017-05-10 08:10谢林杨扬
城市轨道交通研究 2017年4期
谢 林 杨 扬
(西南交通大学信息科学与技术学院,611756,成都//第一作者,硕士研究生)
基于自动Petri网的联锁逻辑设计*
谢 林 杨 扬
(西南交通大学信息科学与技术学院,611756,成都//第一作者,硕士研究生)
联锁软件的逻辑严密性和安全性对于行车有很大的影响。利用自动化Petri网,根据轨道电路、信号机和道岔之间相互制约的关系以及状态的转换,分别建立了信号机、道岔和进路模型,并根据列车的运行状态细化模型从列车压入进路到出清进路的过程,建立进路解锁的模型。基于上述分析,设计了一种基于可编程逻辑控制器的联锁软件设计方案,实现对联锁的逻辑控制。
轨道交通信号系统; 联锁; 逻辑控制; Petri网
Author′s address College of Information Science Technology,South West Jiaotong University,611756,Chengdu,China
计算机联锁软件对轨道交通信号设备进行实时控制[1],以确保行车安全和提高列车运行效率。在车站信号控制系统中,联锁设计是确保列车运行安全的最关键因素之一。为满足联锁软件SIL4的要求,在联锁设计中减少软件的逻辑错误,提出一种基于自动化Petri网(APN)的联锁设计。
Petri网是一种网状信息流模型,包括条件和事件两类节点,在条件和事件为节点的有向二分图基础上添加表示状态信息的Token分布,并按引发规则使得事件驱动状态演变,从而反映系统动态运行过程。 Petri网通过令牌来演化状态,可以很容易地实现逻辑传递[2]。
1 Petri网
Petri网是一个加权双向有向图,主要包括位置、变迁、向弧和令牌[3]。
本文中可能用到的自动化Petri网定义有:
P:{p1,p2,…,pn},表示有限位置集合,可用来表示道岔在定位/反位、信号机的状态等。
T:{t1,t2,…,tn},表示有限个变迁集合,如道岔从定位到反位,信号机从禁止信号到允许信号,进路锁闭解锁等。
χ:{χ1,χ2,…,χn},发生变迁的点火条件,如轨道继电器吸起或者落下。
M0:p→N,表示初始化状态(其中N为非负整数,表示令牌(Token)个数),如常态下列车信号机为红灯,道岔在定位,无进路选排等。
Ini:抑制弧,阻止令牌从前一个状态传递到后一个状态,如列车进入轨道区段时道岔不能动作。
En:使能弧,允许令牌从前一个状态传递到后一个状态。
如图1所示,要想传输过程t1点火,必须满足位置p3和位置p1有令牌(调度台发送的控制命令),位置p4禁止动作,点火条件χ1满足(沿触发,采集轨道电路的状态)。
2 联锁系统模型化
车站联锁逻辑运算的过程,实质是根据列车的运行状态,信号机、道岔、区段之间不同状态的相互转换。运用Petri网的特性可对联锁的整个过程进行建模[5]。本文以图2所示站场图来分析联锁建模的过程。
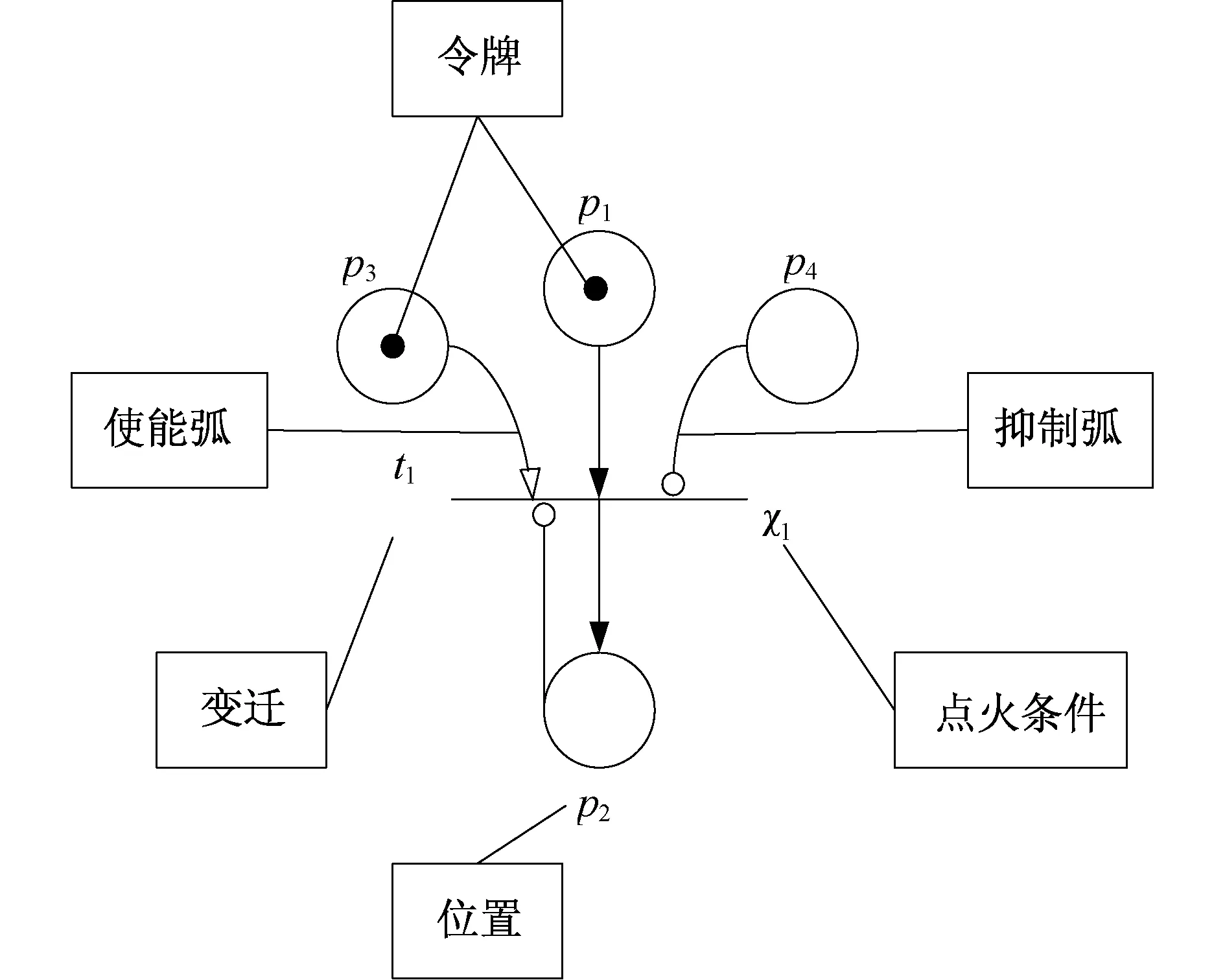
图1 自动Petri网
2.1 道岔建模
道岔用来改变列车的运行方向,有定位和反位2种状态。道岔平时在解锁状态,处于常态(定位/反位),当转换条件满足时,根据控制命令动作。假设9号道岔平时处于定位,令牌从初始状态p91传到定位状态p93。如果道岔需要从定位转换到反位状态,首先必须满足3个条件:①9号道岔在解锁状态;②9DG必须空闲;③有9号道岔从定位到反位的控制命令。3个条件满足可以从状态p93到达状态p94(道岔需要转到反位),相当于道岔正在转换过程。要使9号道岔能转到反位状态p95,还必须要求转换时间小于13 s。图3为9号道岔模型,表1是对应的状态使能事件解释。其中,p表示状态,e为使能。
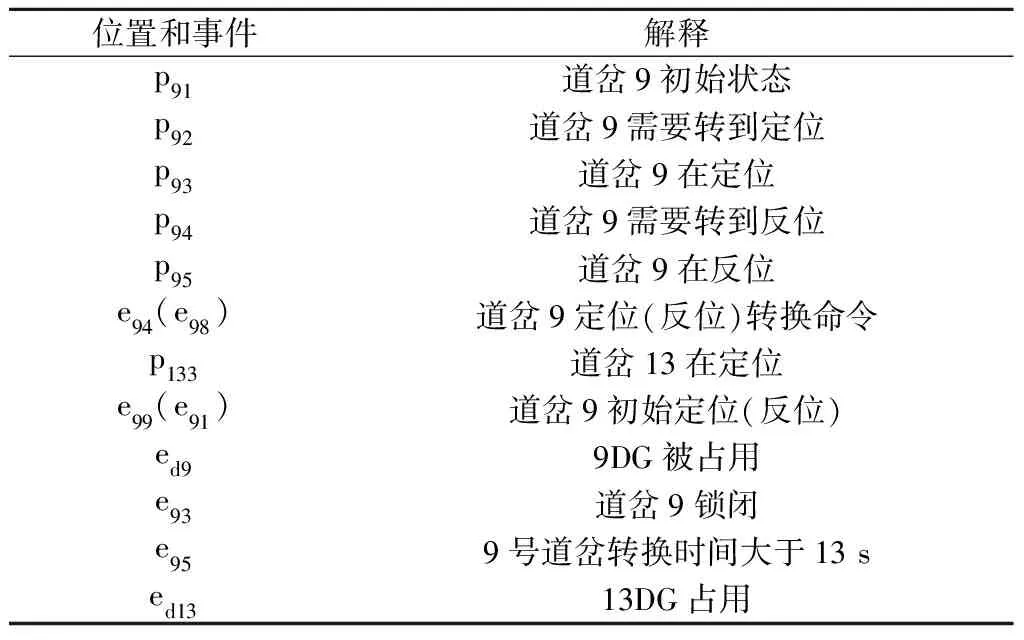
表1 9号道岔位置事件解释
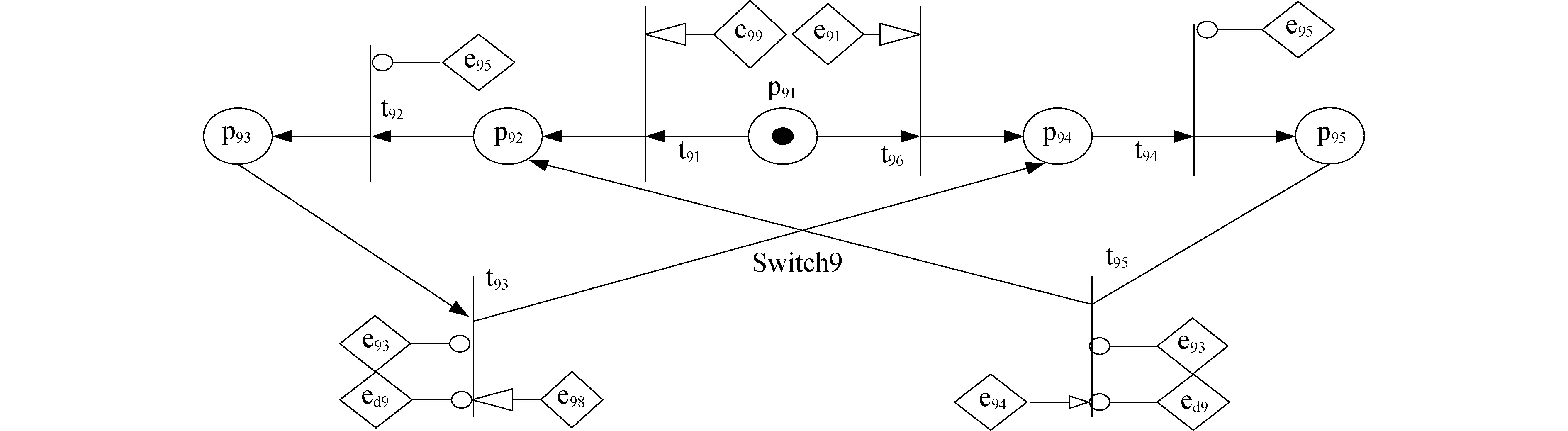
图3 9号道岔模型
2.2 信号机建模
信号机是列车能否行车的关键凭证,因此信号机开放的条件非常苛刻。本文对进站信号机XD进行建模,XD共有白、上黄、红、绿、黄5个灯位。图4的模型对各个灯位开放的条件进行了详细的分析,表2是对应的解释。例如,XD要从红灯状态转换到绿灯状态,必须建立了一条由XD经过IG的正线接车进路,对应的轨道区段空闲,道岔位置正确并锁闭,迎面敌对进路没有建立且被锁闭在没有建立的状态;信号开放后,只要有一个条件不满足,立即转换到红灯状态。对于引导接车进路,需人工确认轨道区段空闲,检查本咽喉道岔位置正确并被锁闭在规定位置,另一咽喉敌对进路未建立且被锁在未建立状态。根据故障状态,排列引导接车进路有多种操作方法:①当确认是信号机灯丝断丝而不能正常开放信号时,先按下进路的始终端按钮,选通进路,然后将进路取消,再按下引导按钮,开放引导信号;②进路中某段轨道区段故障时,将道岔单独操作到规定位置,在人工确认进路无车的情况下,按下引导按钮,开放引导信号。

图4 信号机XD模型

表2 XD状态使能事件解释
2.3 进路建模
进路建模主要分为进路选排、进路锁闭、信号开放三个过程。按压始终端按钮,形成合法的操作命令,实现进路建立过程;锁闭条件满足,区段空闲,道岔锁闭且位置正确;敌对进路没有建立,且被锁闭在没有建立的状态,进路锁闭过程满足。进路锁闭过程中,应注意区分区段锁闭和进路锁闭。区段锁闭是指轨道区段锁闭继电器落下使道岔不能转换[4]。进路锁闭指办理进路后,将进路中的道岔锁在规定的位置,并使敌对进路不能建立。
列车通过进路以后,利用3点解锁检查条件,进入解锁过程,进路依次解锁。检查条件中,由于道岔位置只能排出一条符合要求的进路,所以抵触进路可不必检查。例如,D3-IG的调车进路和S3-D3的调车进路是抵触进路,但由于9号道岔位置不同,确保每次只能建立一条调车进路,因此在建立D3-IG的调车进路时,不必要求检查信号机S3处于关闭状态。图5所示为进路建立到进路解锁的整个过程,从选排进路、进路锁闭到列车通过进路后自动解锁。表3为对应的解释。图6为区段3点解锁模型细化过程,待解锁区段要解锁,必须证明前一区段占用后出清状态,本区段占用后出清状态,下一区段占用状态。图7为整条进路利用3点检查正常解锁的过程。
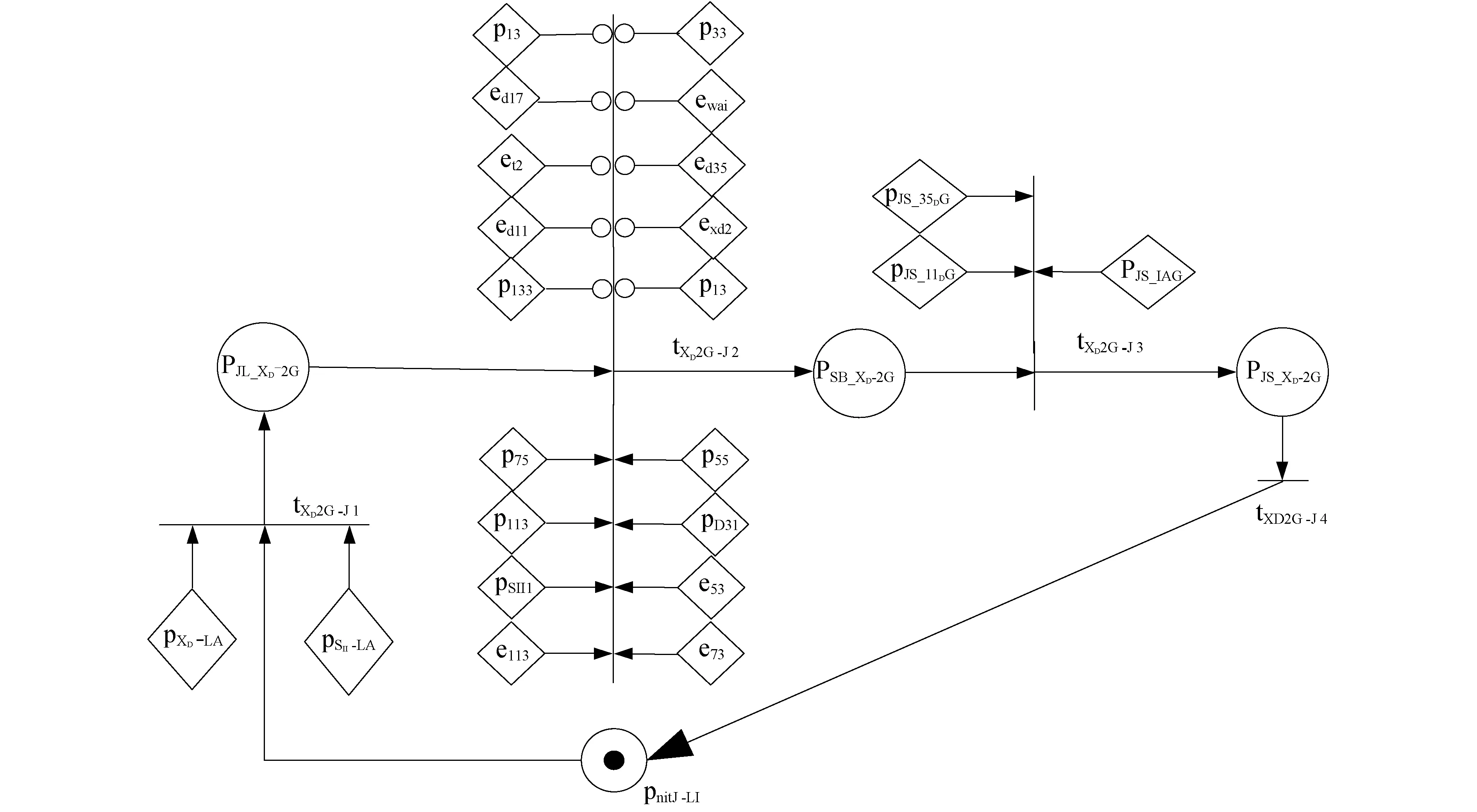
图5 进路建立到进路解锁
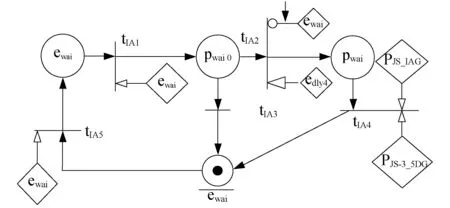
图6 区段3点解锁过程
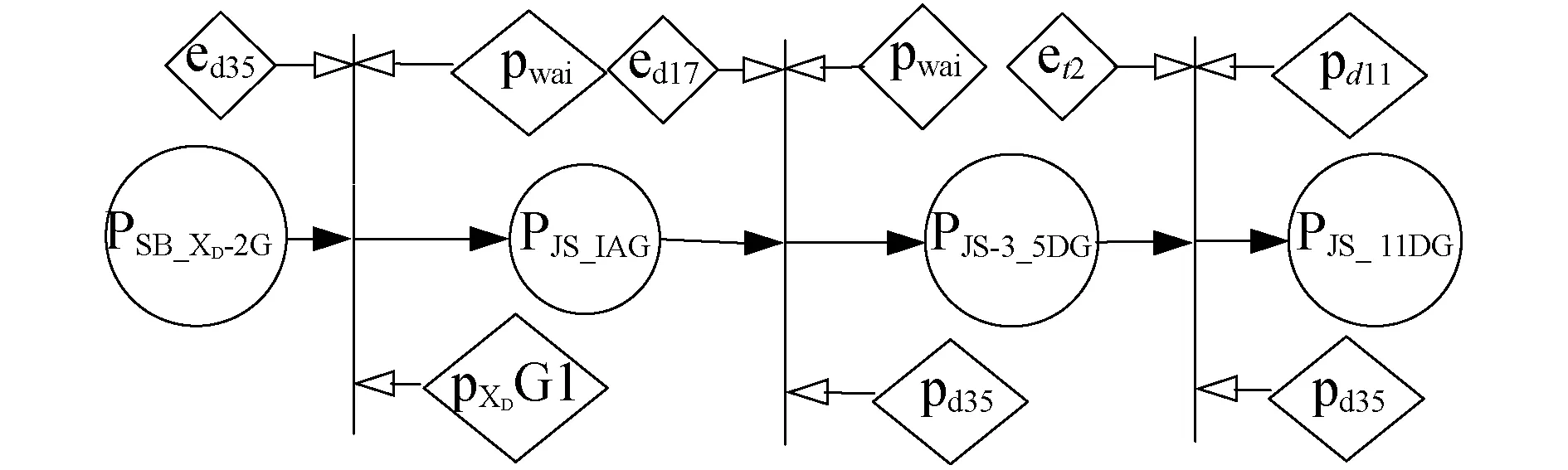
图7 进路正常解锁
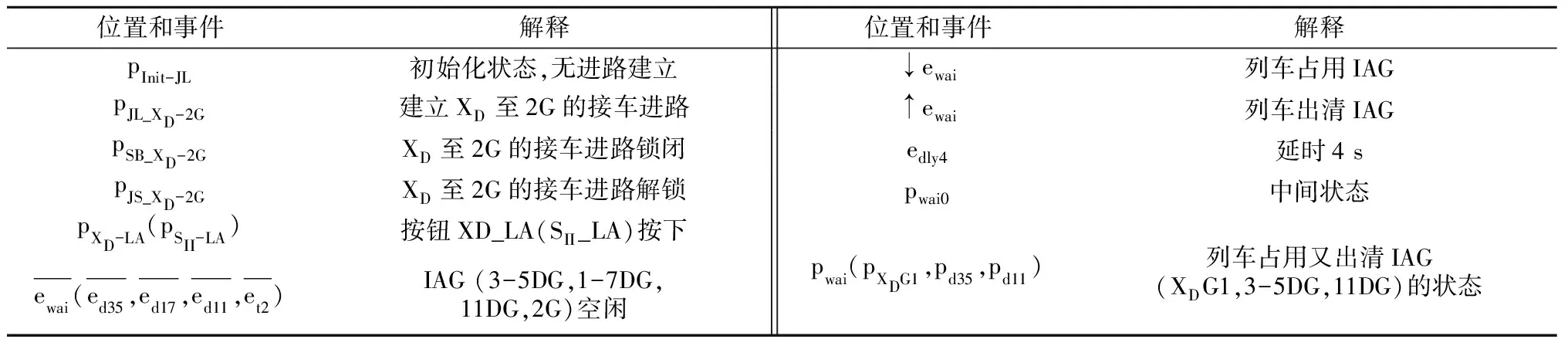
表3 解锁过程位置事件解释
对于调车进路,当调车转线作业时往往走不完牵出进路的全程,就根据折返信号机折返了,因此牵出进路的部分区段无法采用3点解锁方式解锁。如果建立的牵出进路是一条长调车进路,可能导致牵出进路的全部区段不能按正常方式来解锁。例如,将2G上的车列转线到IG去,首先要建立由SII到D7的一条牵出进路,当车列越过反向信号机D5后停车,再建立由D5至SI的折返进路,车列折返,此时11DG可以按正常方式解锁,但由于车列没有进入3AG,所以1-7DG无法按正常方式解锁,必须采用调车中途折返解锁方式。如图8所示。表4为调车中途折返解锁过程位置事件解释。牵出进路部分区段按调车中途折返解锁方式解锁时,必须满足两个条件:①应证明牵出进路部分区段解锁,部分未解锁;②证明列车已进入折返进路,退出原来的牵出进路。
图8 调车中途折返解锁
3 联锁逻辑设计
联锁软件APN模型建立好以后,可对其逻辑状态进行软件设计。联锁逻辑设计一般有两种方法,一种是定义输入输出口来实现令牌逻辑传送;另一种用单片机来实现,根据模型设计流程图,编写软件进行控制。本文主要介绍PLC (可编程逻辑控制器)设计。
表4 调车中途折返解锁过程位置事件解释
定义抑制弧为常闭节点,使能弧为常开节点,9号道岔的梯形图设计如图9所示。根据道岔状态完成对I/O (输入/输出)的分配(见表5)。要使道岔从定位转到反位(10.02→10.04),必须道岔在未锁闭状态(0.01为常闭接点)、9DG空闲(0.02为常闭接点)、有反位转换命令(0.03为常开接点),上述条件满足后,接点10.03为ON,接通定时器TIM000,定时13 s,13 s内TIM000接点为常闭(OFF状态),道岔可转换到反位(10.04),13 s后TIM000为ON,切断反位电路,复原,道岔转换到反位。如果在13 s内道岔不能转换到位,视为故障,通过定时器的触点切断道岔转换电路,道岔不能继续转换。
从图9可以看出,当道岔需要转换时,可随时从当前状态转换到另一个状态,因此整个道岔模型是动态的。最重要的一点,从表5列出的输入输出口来分析,该模型没有任何冲突或者危险的状态输出,整个逻辑是安全的。
图9 9号道岔PLC梯形图
表5 I/O口定义
4 结语
本文利用Petri网的优点,根据轨道交通信号系统联锁相互的制约关系,将Petri网控制监督的理论运用到联锁建模中,综合考虑各种状态下可能出现的故障来作为令牌传送的抑制条件,结合道岔转换需要满足的技术条件和要求,建立了道岔从定位转到反位,再从反位转到定位的模型;以5显示进站信号机XD为例,分析了各个灯位点灯和灭灯的时机以及故障状态下的处理流程,得出了信号机的状态转换模型;随着列车运行状态的变化,进路的状态变化由建立、保持再到解锁,将进路模型细化到从进路建立到解锁的过程,着重研究了正常解锁、调车中途折返解锁中涉及区段的锁闭和解锁的变化过程。基于以上模型,以9号道岔Petri网模型为例,分析了基于PLC的联锁逻辑设计方案,来对建好的模型进行逻辑控制。该梯形图将道岔转换过程中可能涉及到的错误基本考虑在内,有效提高了软件的可靠性。
[1] 魏臻,周霞,鲍红,等。基于Petri网的联锁软件安全性测试的研究[J].计算机工程与应用.2005(3):123.
[2] DURMUS M S ,SÖYLEMEZ M T.Railway Signalization and Interlocking Design via Automation Petri Nets[C]//Hong Kong:7th ASCC,2009:1558-1559.
[3] BIDHAN Malakar,ROY B K.Railway fail-safe signalization and interlocking design based on automation petri net [C]//ICICES2014.Chennai,Tamil Nadu,India:S.A.Engineering College,2014:1-4.
[4] 杨扬.车站信号控制系统[M].成都:西南交通大学出版社,2012:150-180.
[5] OYTUN Eris,ILHAN Mutlu.Design of Signal Control Structures Using Formal Methods for Railway Interlocking Systems[C]//Control,Automation,Robotics and Vision.Singapore:IEEE Conference Publications,2010:776-779.
[6] Emre Dincel,Oytun Eris,Salman Kurtulan.Automata-Based Railway Signaling and Interlocking System Design[J].IEEE Antennas and Propagation Magazine,2013,55(4):309-311.
[7] KATO E R R,Morandin O,POLITANO P R,et al.A modular modeling approach for CNC machines control using Petri Nets[J].IEEE International Conference on Systems,2000,5(5):3147-3152.
欢迎订阅《城市轨道交通研究》
服务热线 021—51030704
Automation Petri Net for Interlocking Logical Design
XIE Lin, YANG Yang
Interlocking rigor and logic of the software has a great impact on traffic safety.With automated Petri net and according to the conversion of mutual restraints between the track circuit signal,switch and the states of transition,models of signal,turnout and route are established respectively.Then,according to a refined model of train running from train pushed approach to the process of clearing approach,an unlock model is established.On this basis, a PLC-based interlocking software is designed to achieve the interlock logic control.
rail transit signal system; interlocking; logic control; Petri net
*中国铁路总公司科技研究计划项目(2015X007-5,2015X009-D,2014X008-A)
U231.7;U284.3
10.16037/j.1007-869x.2017.04.024
2015-06-30)
猜你喜欢
小猕猴学习画刊·下半月(2022年2期)2022-04-16
铁道通信信号(2020年11期)2020-02-07
网络安全技术与应用(2019年7期)2019-12-24
铁道通信信号(2019年4期)2019-10-10
铁道通信信号(2018年9期)2018-11-10
减速顶与调速技术(2018年4期)2018-08-27
计算机工程(2018年8期)2018-08-17
铁道通信信号(2018年1期)2018-06-06
铁道通信信号(2016年5期)2016-06-01
铁道通信信号(2016年2期)2016-06-01