既有建筑沉降变形远程监测方法探讨
2017-05-09 07:24代红超DaiHongchao
住宅科技 2017年6期
■ 代红超 Dai Hongchao
0 引言
我国既有建筑存量大,截至2 0 1 3年底的统计数据,我国建筑业房屋面积已经超过4 0 0亿m2,其中,一半以上的房屋建筑使用已经超过1 0年,接近1/3的房屋使用已经超过20年,为老旧房屋。由于房屋的自然老化、人为破坏、自然灾害等因素影响,房屋安全的相关问题逐年显现。特别是建造在软土地基上的砌体结构房屋,由于地基长期变形大、上部结构抗变形能力差,容易出现不均匀沉降引起的安全隐患问题,如2014年全国老楼危楼安全排查时了,已发现一定数量的房屋存在整体严重倾斜现象。为明确上述房屋的地基变形发展情况,预防突发事故发生,需要进行沉降变形监测。
另外,随着城市化进程的高速发展,地铁隧道、城市道路隧道、深基坑等市政工程或城市建设工程施工不断进行,上述施工可能会导致周边土体的应力状态变化、附近地下水位变化等,从而影响周边建筑安全。通过对相邻周边房屋的沉降变形监测,明确施工过程中既有建筑的稳定性和安全性,同时,根据现场的实际情况,适当调整施工工艺方案与控制进度,确保周边建筑物的安全。
1 沉降监测方法及原理
在既有建筑沉降监测方面,常用的方法为人工水准监测、静力水准仪自动化监测、测量机器人自动化监测。
1.1 人工水准监测
人工水准监测首先在既有建筑周围竖向承重构件上布置沉降观测点,监测点的高程通过设置在周边的基准点高程形成一条闭合环线水准路线。然后,采用WI L D N A 2或D S Z 2精密自动安平水准仪加测微器和铟瓦标尺,依照国家二等水准的闭合差标准进行测量。
1.2 静力水准仪自动化监测
静力水准系统又称连通管△水准仪,系统至少由两个观测点组成,每个观测点安装一套静力水准仪。静力水准仪的贮液容器相互用通液管完全连通,贮液容器内注入液体,当液体液面完全静止后系统中所有连通容器内的液面应同在一个大地水准面上0,此时每一容器的液位由传感器测出,即初始位值分别为:(图 1)。
假设既有建筑监测点中,测点1作为基准点,测点2~4相对测点1有所上升或下降,当系统内液面达到平衡静止后形成新的水准面 i0,则各测点连通容器内的新液位值分别为:图2)。
系统各测点的液位由静力水准仪传感器测得,各测点液位变化量分别为当△Hi为正值时,表示该测点贮液容器内的液面升高;当△Hi为负值时,表示该测点贮液容器内的液面降低(图2)。
1.3 测量机器人自动化监测
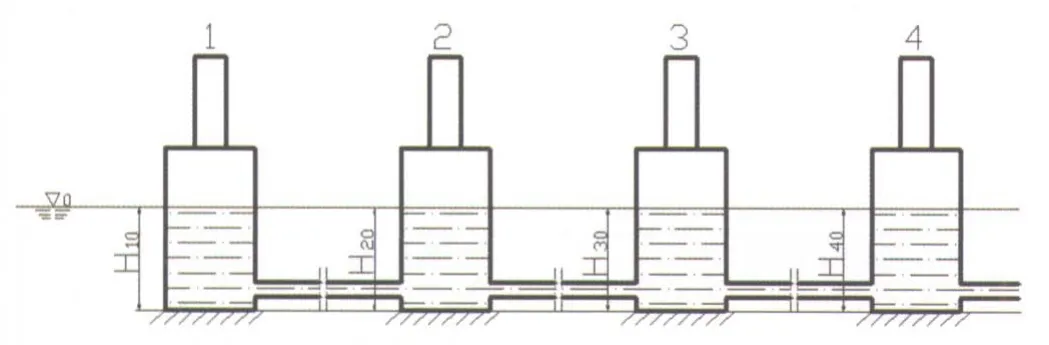
图1 静力水准仪工作原理(一)
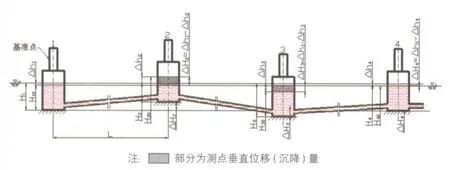
图2 静力水准仪工作原理(二)
测量机器人是一种能自动搜索、跟踪、辨识和精确目标并获取角度、距离、三维坐标以及影像等信息的电子全站仪。它是在全站仪基础上集成马达及视频成像系统,并配置智能化的控制及应用软件而发展形成的综合性测量系统。测量机器人具有自动化程度高、测量功能多样、能提供三维测量成果等优势。
示范区农业供水电价为0.53元/kWh,节水工程配套完建后斗渠渠道水利用系数为0.88。经计算,桃花山镇农民用水者协会控制范围内泵站运行费用为0.083元/m3;调关镇农民用水者协会和东升镇农民用水者协会控制范围内泵站运行费用为0.018 元/m3。
变形监测系统主要采用极坐标差分法进行测量,每一个测量周期均按照极坐标的原理分别采集基准点和变形点的斜距、水平角、天顶距,通过计算得到监测点的实际坐标,根据两周期的实际坐标差,就可求出监测点的三维位移量。
测量机器人自动变形监测系统的主体由全站仪、计算机、自动变形监测软件、通信和供电设备、仪器墩、基准点及监测点棱镜组成,系统构成如图3所示。
在工作基点上建设监测室,安装全站仪,并配备通讯和供电设备,在基准点和监测点上固定安装反射棱镜,从而构成整个变形监测网,实现全天24h的实时变形监测。
2 常见沉降监测方法的优缺点
目前,在沉降监测方面,人工水准监测应用最为普遍。传统的人工监测基本能满足大部分既有建筑的沉降变形监测需要,但也存在一些不足之处:①人工成本大,测量周期长;②监测结果的时效性较差,不能满足有效预防既有建筑突发事故的监测需要;③在新建工程施工相邻影响项目监测中,监测点容易被破坏;④观测时段和频率受限制;⑤监测数据处理工作量大。由于新建项目的复杂化、被监测既有建筑的区域化,既有建筑监测项目规模及数量不断增大,传统人工变形监测表现出了一定的局限性。
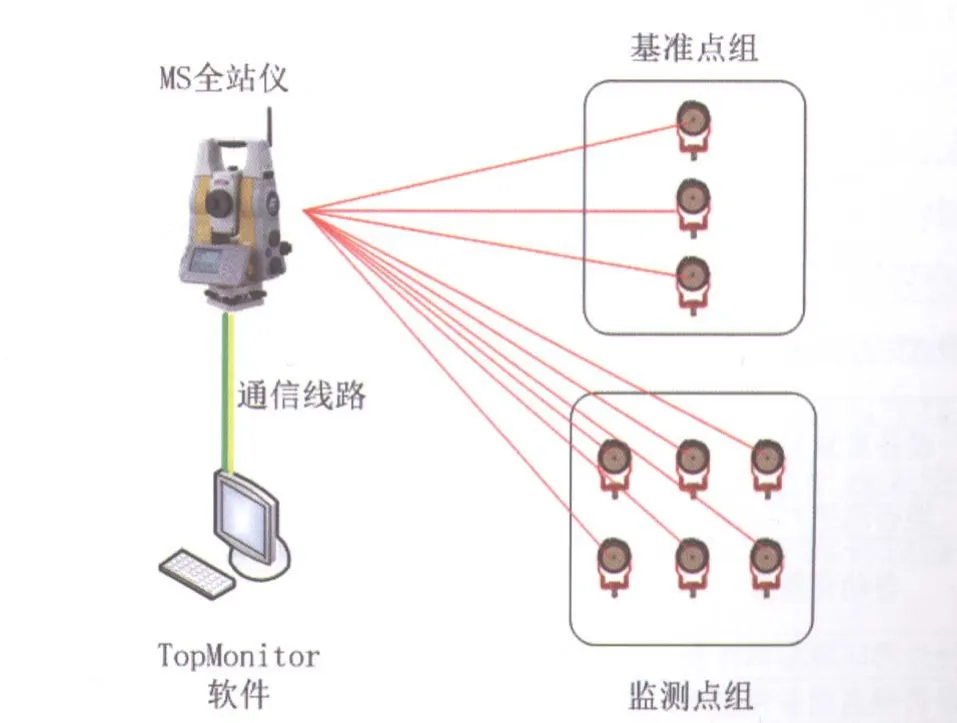
图3 测量机器人自动变形监测系统示意图
自动化监测是相对于传统的人工监测而言的,采集仪或自动化全站仪通过采集或扫描安装在既有建筑上的传感器或棱镜,获取监测点变形数据,然后通过数据发射传输模块实时传输至远端计算机上,经过简单的数据处理后即可实时显示既有建筑的沉降变形数据,从而实现沉降监测的自动化、智能化。
测量机器人可以实现三维变形监测,在大坝、边坡、地铁、隧道等领域得到了较为广泛的应用,可实现大范围内的自动化监测,具有精度高、效率高、自动化程度高等优点,无论白天还是晚上,都能实现目标的自动识别、照准和跟踪,保证了监测工程全天24h连续运行。
静力水准仪自动化监测具有实时、动态、全天候、高精度等优点,但对于一般项目而言,获得的数据为相对沉降数据,难以反映既有建筑的整体沉降情况。特别是对于新建工程施工相邻影响项目,如仅采用静力水准仪一种监测手段,难以按照既有建筑物的累计沉降进行报警,不利于调整新建工程施工进度或施工措施;另外,也难以获取沉降速率,从而无法判断既有建筑的地基变形稳定情况。
几种常见沉降监测手段比较分析见表1。
3 基于静力水准仪的既有建筑绝对沉降监测
静力水准仪系统是测量两点间或多点间相对高程变化的精密仪器,即根据静力水准仪连通容器内液面的变化获取各监测点相对于某监测点的相对竖向位移。对于既有建筑的监测,一般情况下,各监测点都可能会产生竖向变形,因此,监测结果只能反映各监测点间的相对竖向位移变化量。
3.1 监测方法
当被监测既有建筑周边有变形稳定的建(构)筑物时,可以在被监测既有建筑上安装静力水准仪的同时,在变形稳定的建(构)筑物上安装1个或2个静力水准仪,通过溶液连通管等连接成一个管路。此时,安装在变形稳定的建(构)筑物上的静力水准仪相当于基准点,其它测点相对于该基准点的竖向位移变化量即为其绝对沉降。
同时,当被监测对象为一个区域内的多幢既有建筑时,为了避免管路太长而影响测量结果的灵敏性,可以每一幢房屋或两幢房屋自成一个独立的静力水准系统,通过设置转点的方式,即在同一竖向棱线上布置2个静力水准仪,分别对应2个独立静力水准系统的测点,把多个独立静力水准系统连为一体,最终获得整个区域内全部建筑测点的绝对沉降。
3.2 缺点
基于静力水准仪法对既有建筑进行绝对沉降监测,也存在一些劣势,主要表现为:①被监测对象附近存在变形稳定的建(构)筑物,且能在其上安装静力水准仪并与监测对象测点形成静力水准管路,实际工程中上述条件较难以满足;②静力水准管路不宜太长,宜控制在150m以内,否则各监测点静力水准液面平衡时间较长,影响系统的灵敏性;③通过设置转点法获取整个区域的监测点绝对沉降时,静力水准仪安装及管路布设较为复杂,且设置转点增加了静力水准传感器数量,增大了成本。
3.3 案例分析
某城市公路隧道下穿既有住宅小区,采用盾构法进行隧道掘进。居民住宅楼建造于20世纪80年代,基本为多层砖混结构,竖向由纵横砌体承重,预制板楼屋盖,每层设有圈梁,未设置构造柱,基础为天然地基浅基础,地基为沿海软土地基。
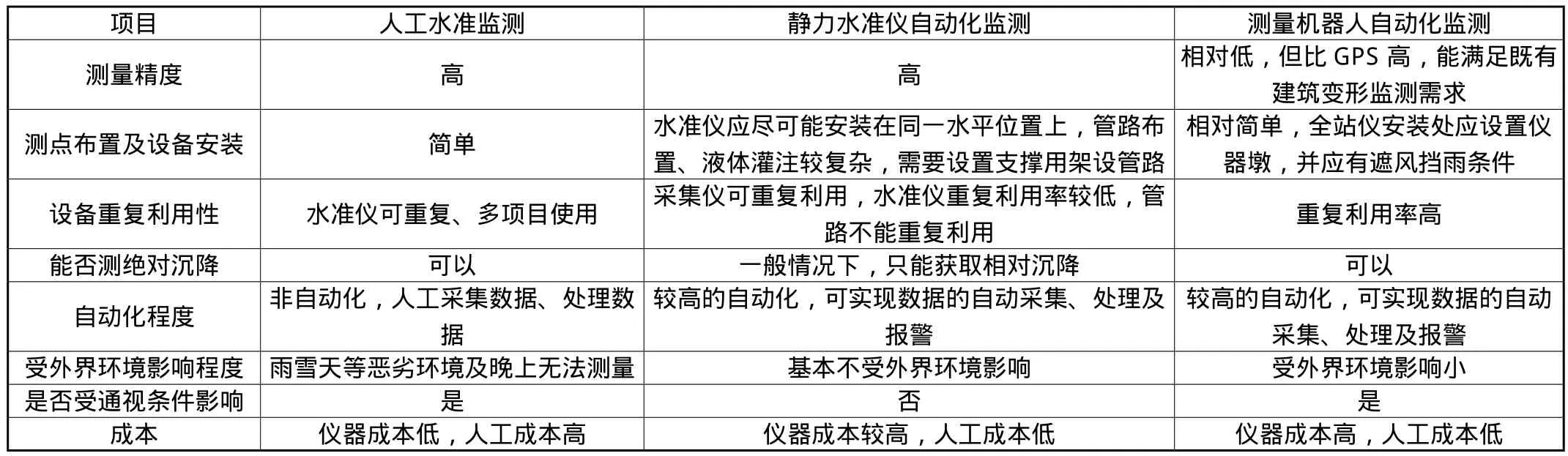
表1 常见沉降监测手段比较
由于居民住宅楼位于新建隧道的正上方或侧方,部分房屋与隧道顶部距离较近,且既有建筑基础刚度小,上部结构整体性较差,整体抗变形能力弱。因此,为防患于未然,应对既有住宅楼进行新建工程施工中的自动化监测。
被监测住宅楼附近有一幢高层住宅楼7#楼,桩基础,受新建工程施工影响很小,竖向变形基本稳定。因此,在该高层建筑外墙上安装一个静力水准仪作为基准点,与被监测住宅楼的监测点联测,从而获取了被监测住宅楼测点的绝对沉降(图4)。
4 静力水准仪与测量机器人相结合的既有建筑绝对沉降监测
对于城市中的既有建筑,与郊外空旷场地相比,通视条件不佳,难以仅采用测量机器人一种手段对既有建筑进行全面的沉降自动化监测。同时,静力水准仪法受线路长度、难以获取绝对沉降等因素影响,亦非理想的绝对沉降监测手段。
4.1 监测方法
通过在既有建筑的同一竖向棱线上(以下简称共同测点),同时布置棱镜和静力水准仪,可以实现测量机器人与静力水准系统相结合的绝对沉降监测,即可通过测量机器人自动化监测系统获取共同测点的沉降绝对值;并通过静力水准仪自动化监测系统,获取其余测点相对于共同测点的相对沉降量,再加上共同测点的绝对沉降量,即为其余测点的绝对沉降量。
该种方法可有效弥补静力水准仪和测量机器人在城市既有建筑沉降监测中各自的不足,优势互补、取长补短,具有较好的应用前景。
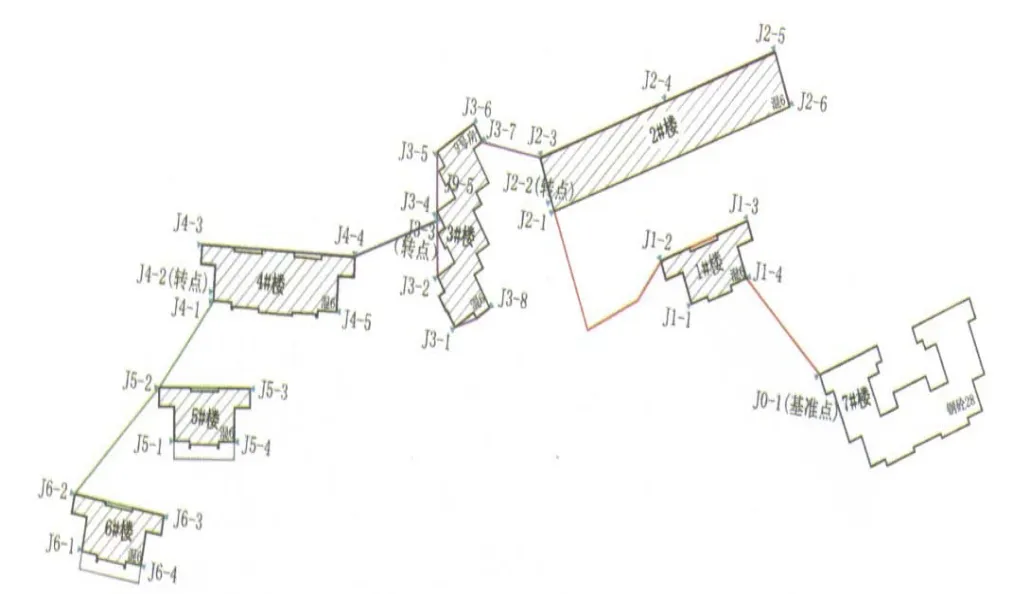
图4 静力水准仪安装及管路布置示意图
4.2 案例分析
需要对某住宅小区内的6层砌体结构房屋进行沉降监测,受通视条件影响,测量用的全自动全站仪只能安装在相邻的变形稳定的高层住宅中或屋顶上(图5)。但在该条件下,全站仪通视仍受影响,每幢被监测房屋只有1个或2个角点可被监测到,监测结果不能全面反映既有多层住宅的沉降变形发展情况。
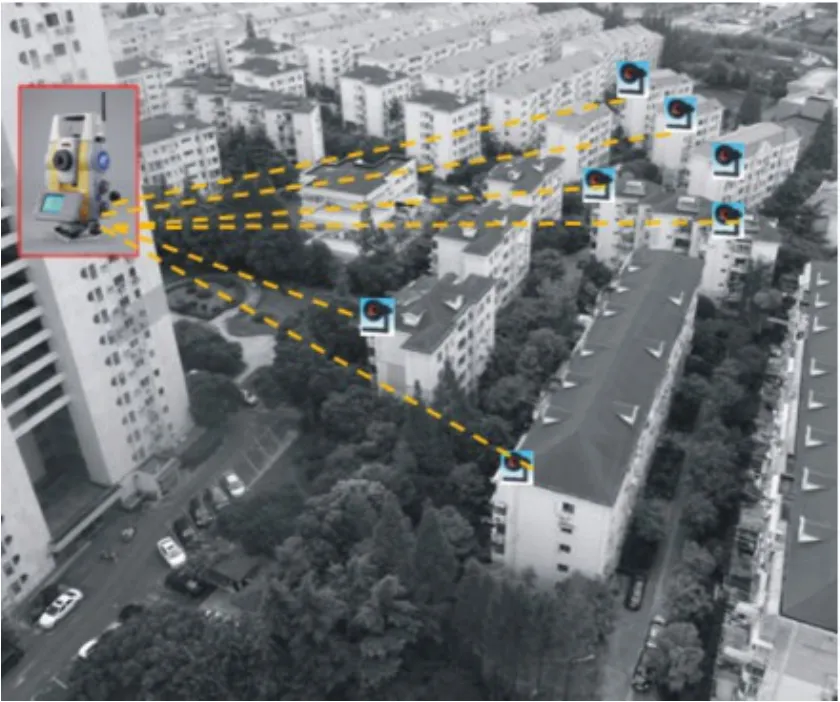
图5 某项目自动化全站仪、棱镜安装位置示意图
为此,在通视条件好的每幢房屋角点各布置一个棱镜,采用测量机器人系统获取其绝对沉降。另外,在每幢房屋的东外墙和北外墙上均匀安装静力水准仪,形成一个L型的静力水准仪测量系统,并确保安装棱镜的位置上下对应安装有静力水准仪。最终,通过两种测量手段联测的方法,全面地测得了每幢房屋的绝对沉降变形情况。
5 结语
综上所述,对于既有建筑的绝对沉降变形自动化远程监测,可采用基于静力水准仪对既有建筑绝对沉降监测、静力水准仪与测量机器人相结合的既有建筑绝对沉降监测两种方法。前者需要确保被监测建筑周边存在变形稳定的建构筑物,才能测得绝对沉降,并存在线路不宜太长、需要设置转点等不足;后者可有效弥补在既有建筑沉降监测中静力水准仪法一般只能测相对沉降、测量机器人法通视条件要求高等不足,优势互补,取长补短,具有较强的操作性和较好的应用前景。
猜你喜欢
建材发展导向(2022年10期)2022-07-28
防爆电机(2022年1期)2022-02-16
昆钢科技(2021年6期)2021-03-09
北京测绘(2021年1期)2021-02-05
科学咨询(2020年43期)2020-03-04
建材发展导向(2019年11期)2019-08-24
家庭影院技术(2018年11期)2019-01-21
新商务周刊(2018年7期)2018-12-08
价值工程(2017年23期)2017-07-15
中小企业管理与科技·中旬刊(2014年2期)2014-04-01