
基于三维点云数据的煤矿顶板灾害监测研究
2017-04-27 06:15:05胡乔森李慧娟
中国煤炭工业 2017年4期
文/胡乔森 李慧娟
一、引言
煤矿生产中由于回采工作面复杂的地质构造,切眼顶板冒顶灾害的监测问题一直是煤矿安全领域的一大难题。因此,研究切眼顶板灾害监测,对于保障井下安全生产具有重要的现实意义。
目前,国内外诸多学者主要以经典力学为理论基础,采用钻探、物探等手段对顶板矿压进行监测,从而对巷道顶板岩层进行宏观的稳定性分析。然而在实际监测中为更精确地了解矿压的变化,往往过多地实施钻探物探,这将对顶板造成进一步的破坏,同时带来的是监测周期较长。本文通过研究当前煤矿安全监测方法在顶板灾害监测领域的应用方案和三维激光扫描技术在变形监测中的应用,提出了基于三维点云数据处理的煤矿顶板灾害监测方法及系统的配置方案。
二、平台架构
三维激光扫描技术利用激光测距的原理,通过记录被测物表面大量而密集的点的三维坐标、反射率和纹理等信息,可快速重建被测目标的三维模型。三维激光点云数据具有海量性、离散性、高精度性和丰富性,在切眼或巷道建模中虽然数据量大,但是在精准性方面完全可以保证得到最精确的顶板位移差异分析。当前对点云数据的处理主要运用三角网滤波算法及小波分层等算法,计算复杂度比较高,带来的是运算时间上的拖长,在顶板灾害监测中,为了保障监测数据的实时性,缩短监测周期则是一项重要的任务。因此,在深入分析顶板灾害、分析现有三维激光扫描方法及点云数据处理算法的优点及不足,提出以三维点云数据处理为核心的基于三维激光扫描仪的煤矿顶板灾害监测技术方案,将顶板由应力作用产生的位移用三维点云数据表现出来,从而监测顶板灾害的发生。
本文的监测方法平台架构包括使用三维激光扫描仪进行数据采集、对三维点云数据进行处理。经研究三维点云数据在复杂空间进行建模的属性特点,由三维激光扫描仪可直接快速获得真实空间表面的点云数据,对数次采集的点云数据进行差异化分析,即可对顶板灾害的发生进行监测。本文将着重阐述基于三维点云数据的煤矿顶板灾害监测系统中的三维点云数据处理方法与实现方法。
三、顶板点云数据采集
基于三维点云数据处理的煤矿顶板灾害监测方法使用到的FAROLaserScannerFocus3D是一款中距离高速三维扫描仪,且为本质安全型三维激光扫描仪。该扫描仪垂直视野300°,水平视野360°,测角精度0.015°,范围±5°,最大扫描距离为 130米,数据测量速度在122000~976000点/秒之间,测距误差在±2毫米,配套TrimbleRealWorks点云处理软件。
点云数据采集步骤如下:
步骤1,井下移动目标(包括井下工作人员或其他移动设备如机器人)携带FARO三维激光扫描仪,在采煤工作面或巷道内每隔25米对顶板空间区域进行一次扫描,获得T1时刻顶板复杂空间曲面的点云数据。
步骤2,将数次采集到的点云数据传送给在井下的本质安全型计算机设备,再由这些设备经过光纤传送给地面计算机控制中心。
步骤3,在扫描完某一区域后,间隔T时间再进行一次扫描,获得的Tn时刻顶板点云数据按步骤2进行。
四、顶板三维点云数据的预处理
由于三维激光扫描仪获取的顶板点云数据因距离远近的情况有密度不均的特性,并且井下顶板表面属性的不规则性都会产生一些密度稀疏的离散点云群。为提高差异分析的精度,降低点云庞大的数据量,对顶板点云使用三维立方体网格滤波算法进行精简。三维立方体网格滤波算法即将顶板点云分割成n个立方体,然后求出每个立方体内点云的平均曲率,即对应顶板点云数据精简的近似阈值。每个立方体的重心则近似为这个立方体内的其他点集,这样就完成对整体点云数据的降采样过程,对海量的点云数据进行更精确的简化。
设采集到的顶板点云数据有n个点,两点的距离为dis,计算整体点对点的均值和方差:
设曲率的阈值为δ,如果ξ'<δ,则保留该立方体;如果ξ'>δ,则将该立方体继续分割为更小的立方体,再计算曲率,重复该行为。直到保留所有立方体,对应集合S。
遍历所有保留下来的立方体内的点云,求出该立方体的重心(x',y',z',):
其中l为立方体S内所有点的数量。
计算顶板点云中两两相邻立方体重心的距离Li,再求出平均距离:

若 Li>d¯,则舍弃该点;若 Li<d¯,则留下该点。
将顶板点云数据用求出的重心数据代替,舍弃离散边缘的点云,这样就对大量的、复杂的、没有规律可循的点云进行精简,完成点云的滤波,即点云数据的预处理。
五、基于三维正态分布变换算法的顶板点云精确匹配
三维正态分布变换算法即是将顶板点云数据分割成若干立方体集合再进行分析。将T1时刻作为参考点云,T2时刻作为目标点云,将两时刻点云都分割为若干立方体集合,从目标点云中找到某一点,计算这一点到参考点云匹配点的似然函数的最值。每个立方体内的点云为一个集合,用S={s1,s2,……sn}表示,则目标点云中点到参考点云中每个立方体的似然函数均值为:

协方差矩阵Σ为:

则目标点云中点在参考点云的无数立方体中的概率密度函数可用正态分布函数表示:



将T1时刻和T2时刻点云数据经三维正态分布变换算法处理后导入点云配准系统中,将各立方体集合点云位置半径进行对比分析,结果如表1所示。
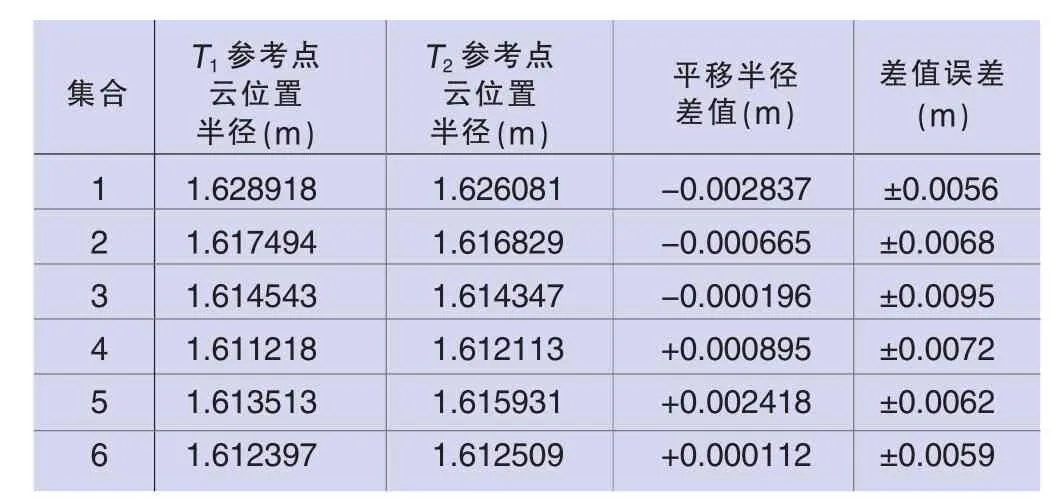
表1 各集合点云位置半径差值
目前,没有相关的规定明确提出顶板变形多少就会有冒顶风险,本文参照隧道领域中结构变形小于d/1000的标准,其中d为设计直径。隧道中设计直径为5米的情况下,误差需小于5毫米。在煤矿顶板监测中,根据误差传播定律分析亦可得到误差变化区间也应在5毫米至7毫米之间。根据表1可得误差最大不超过3毫米,因此,上文所述顶板灾害监测方法可行。
六、实验验证
实验使用C++和OpenGL,在VisualStudio2016上运行。 计算机配置 CPU:Corei7-4720Q,2.60GHz,RAM:16G,NVIDIAGeForceGTX980M。
实验数据是结合冀中能源孙庄矿某综采工作面采集的。该工作面面长26m,推进长140m,回采面积约14000m2,采用FAROLaserScannerFocus3D进行现场数据采集,扫描距离为25m时,点云位置精度为±2.3mm,扫描距离为50m时,点云位置精度为±2.7mm,采集的顶板点云共有9783049个点,并对获得的顶板点云数据进行精确性分析。现阶段常用的三维点云建模软件有EdgeWise,该软件自动提取点云特征点和建模功能,能帮助专业人员大大缩短根据三维扫描仪采集的数据生成BIM模型所需要的时间。为比较应用本文的三维点云数据处理方法建模效率和EdgeWise建模效率,从上述采集到的900多万点云中截取9组数量不等的点云模型,以100万个点为基准,依次增加100万个点云数据,将每组点云模型分别通过EdgeWise建模和本文提出的方法建模。各数量级的点云模型建模时间统计如图1所示(横坐标为点云数量级,单位为万个;纵坐标为建模所需要的时间,单位为秒)。
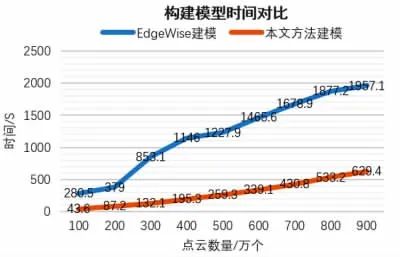
图1构建模型时间对比
由图1可得到,当截取顶板点云数量为100万个的时候,建模时间仅为43.6s,EdgeWise耗时280.5s,当点云数量级不断攀升的情况下,建模时间成线性增长,且增长不明显,而EdgeWise耗时明显增高。由此可见本文所述方法效率为EdgeWise的5倍之多。
同时,将顶板点云数据中的一些密度稀疏的离散点云群去掉后,降低点云庞大的数据量,同时不会降低差异分析的精度,极大提高差异配准的速度,有效识别顶板变形和冒顶风险区域。
七、结语
本文将三维激光扫描技术应用到煤矿顶板灾害监测中,结合三维立方体网格滤波算法和三维正态分布变换算法,完成对孙庄矿某工作面的实时监测。在试用中仅需几分钟即可获得煤矿顶板的三维点云数据,对人力要求极低。在完成采集后,通过本文所述算法处理900万数量级点云数据时,也仅需10分钟,是以往点云数据处理算法所需时间的三分之一,极大缩短顶板灾害的监测周期。同时在点云配准中,误差精度可控制在3毫米内,大大提高了监测的可靠性。
煤矿顶板灾害监测方法众多,各类方法相互独立、自成体系,本文为煤矿顶板冒顶灾害监测提供了一种新思路和新方法,在制定顶板灾害监测标准、分类规范监测信息、推动煤矿安全生产的标准化建设方面具有一定的借鉴意义。
猜你喜欢
科普童话·学霸日记(2023年7期)2023-08-21 09:49:46
江苏安全生产(2022年8期)2022-11-01 09:15:18
江苏安全生产(2021年6期)2021-08-05 07:47:14
江苏安全生产(2020年5期)2020-06-15 09:38:52
中学生天地(A版)(2017年6期)2017-06-23 18:32:36
太空探索(2016年9期)2016-07-12 09:59:53
小学生导刊(低年级)(2016年6期)2016-07-02 22:22:15
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27 14:02:34
现代营销·经营版(2015年3期)2015-04-20 06:46:58
现代营销·经营版(2013年5期)2013-05-14 14:55:04
