
某试验场强化路三维虚拟路面重构与对比分析
2017-04-14 08:39:04周建文刘依路
汽车工程 2017年2期
荣 兵,肖 攀,周建文,刘依路
(中国汽车工程研究院股份有限公司,重庆 401122)
某试验场强化路三维虚拟路面重构与对比分析
荣 兵,肖 攀,周建文,刘依路
(中国汽车工程研究院股份有限公司,重庆 401122)
对某试验场强化路面中线轨迹的测试数据,进行样条插值,还原路面轨迹,对测试的路面纵向5路高程数据,根据路面横向几何特征进行横向插值:横向几何特征一致的路面,采用线性插值;横向几何特征随机变化的路面,采用样条插值;横向几何特征不一致,但存在一定规律的路面,按其规律插值。最终依据相应的插值方法编程实现三维虚拟路面重构。进一步对重构的RDF和CRG格式路面进行对比的结果表明:CRG格式更适用于三维虚拟路面重构和动态载荷预测的动力学分析。路面特征越复杂,CRG路面在计算效率上相对RDF路面的优势更为突显。
三维虚拟路面重构;横向几何特征;线性插值;样条插值
前言
在车辆结构件的开发过程中,基于试验场采集载荷谱分解的结构件接口点动态载荷,进行疲劳分析及优化的方法已得到了广泛的应用[1-3]。然而该方法受到较多的限制,需具备开发车型的参考模型,获取试验场载荷谱数据,因而使疲劳开发的成本增加,同时延后疲劳分析和优化的时间节点,在结构件设计前期无法有效地支持结构的优化设计。随着多体动力学仿真技术的发展和适用于疲劳载荷仿真轮胎模型精度的不断提升[4-5],从而使得基于试验场虚拟路面的动态载荷提取技术的应用价值越来越显著。该技术的前提要具备精确的疲劳仿真轮胎模型和与试验场一致的三维虚拟路面模型,在车辆开发前期运用多体动力学仿真技术,获得各结构件接口点的动态载荷,用于预测其疲劳寿命。
本文中针对国内某试验场的强化路面,采用自主研发的惯性参照道路纵断剖面检测系统测得路面中线轨迹数据和纵向5路高程数据,并结合各强化路面的不同特征,对路面横向高程进行相应地插值,从而完成三维虚拟路面的重构,真实地反映了路面表面的几何特征,在此基础上,对RDF和CRG格式虚拟路面的仿真效率进行了对比分析。
1 强化路面高程的采集与处理
1.1 路面高程的采集
惯性参照道路纵断剖面检测系统如图1所示,主要利用集成在检测梁的加速度传感器和激光位移传感器,获得路面纵断面上的局部几何轮廓特征曲线。其中,激光传感器(5个)采用三角测距原理感知路面特征的变化,其布置图见图2;采用加速度传感器(6个)测得加速度,经积分、滤波得到车辆振动位移,以消除其影响[6]。另外,该检测系统还集成了GPS系统,以记录行驶轨迹。该系统的采样频率为22kHz,有效地保证了在100km/h的采集速度下,最小采样间距能够小于1mm。

图1 惯性参照道路纵断剖面检测系统

图2 激光传感器布置图
在路面高程采集试验中,采集车沿路面中线匀速行驶,有效避免车速急剧变化对车身姿态的影响,且准确地测量路面左右侧高程。
图3为通过惯性参照道路纵断剖面检测系统获得的国内某试验场部分强化路面数据,共6个通道,第1~5通道为5个激光传感器所测试的路面高程数据,第6通道为路面的纵向距离,结合5个高程曲线则反映出路面在纵向上的5个截面。由GPS系统采集的路面轨迹曲线如图4所示。
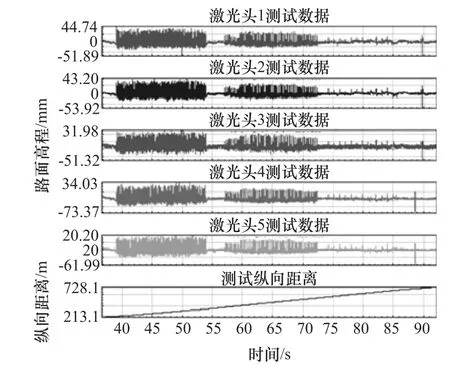
图3 部分强化路面测试数据
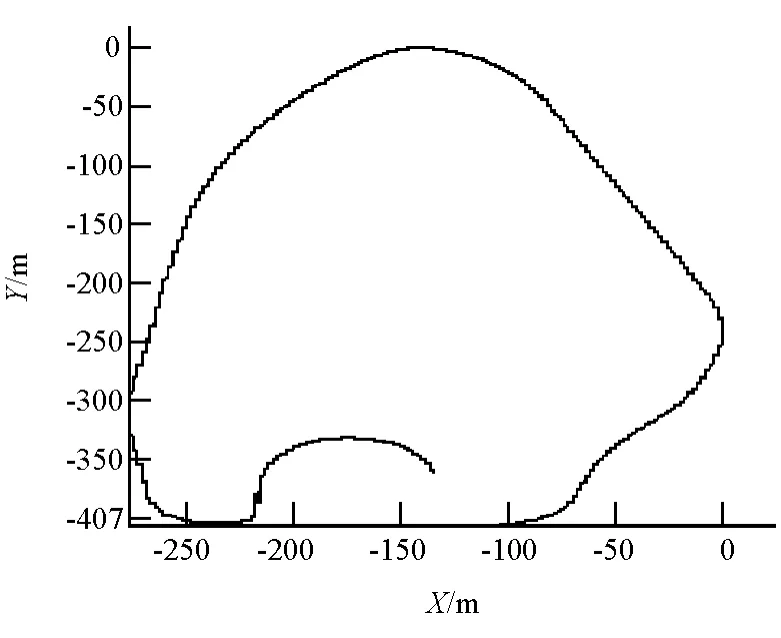
图4 路面轨迹曲线
1.2 路面高程数据的处理
采集的路面高程数据涉及到试验场中大量的过渡路段,且横向特征不同的路面,其虚拟路面的横向插值和重构方法也不同,故对各路面的高程数据进行分割,再用于其虚拟路面的重构。
路面高程数据依据路面轮廓特征,进行识别和分割,图5为鹅卵石路与共振路面的高程数据分割示意图。基于采集时间同步原则,得到的共振路轨迹曲线如图6所示。
分割后的数据按照虚拟路面在纵向的分辨率要求,进行路面高程数据的等距离抽样。以试验场中路面特征最小的碎石路为例,碎石的平均直径在10mm以上,故所有路面的高程数据以5mm等距进行重抽样。其次,将路面轨迹数据与抽样后的高程数据进行距离同步。
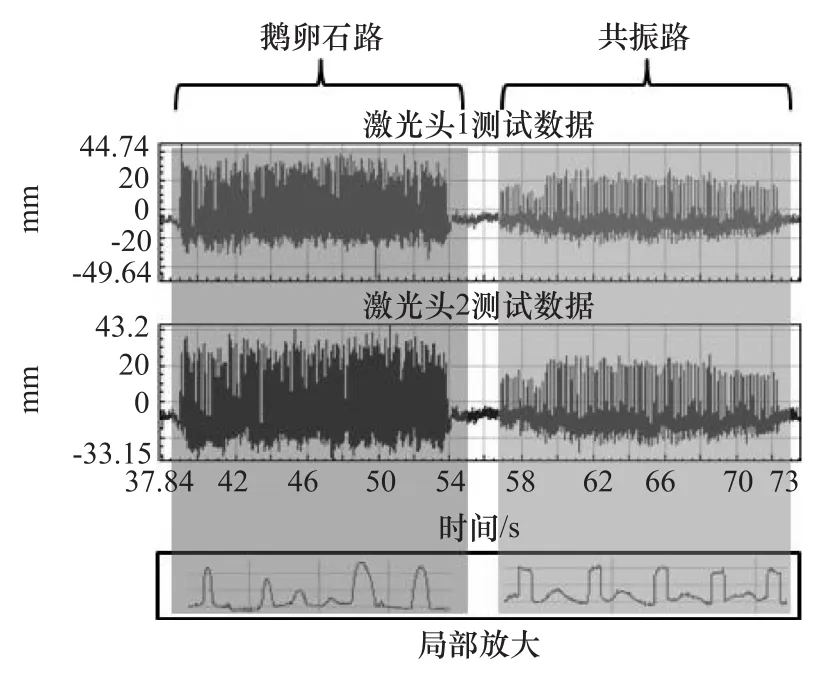
图5 高程数据分割示意图
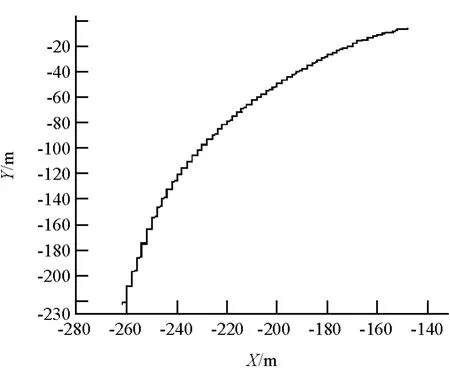
图6 共振路轨迹曲线
2 强化路面特征分类与重构思路
2.1 强化路面特征分类
对该试验场需要三维虚拟重构的路面进行统计,按其横向特征进行分类,其主要划分为4大类型,见表1,其中:A类路面是双侧横向几何特征在纵向90°方向一致,如搓板路见图7;B类路面是单侧或双侧横向几何特征在纵向一定夹角方向一致,该夹角可通过采集路面高程数据的距离差进行计算,如共振路见图8;C类路面是双侧横向几何特征随机分布,例如:鹅卵石路、碎石路等;D类路面是双侧横向几何特征不一致,但存在一定规律的路面,例如:比利时路在横向铺筑时砖块间存在一定断开间隙,且砖块高程也不一致,横向几何特征存在差异。
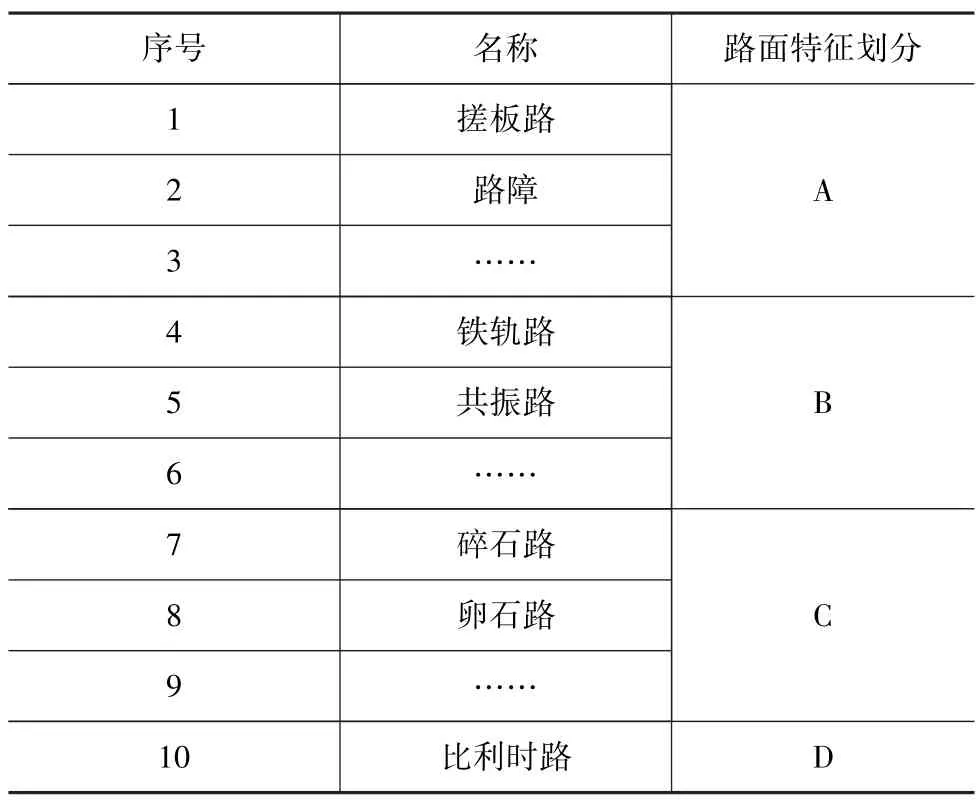
表1 路面统计及特征划分

图7 搓板路特征示意图

图8 共振路特征示意图
2.2 虚拟路面格式与重构思路
三维虚拟路面比较常见的有RDF和CRG两种格式。RDF格式是3D等效容积路面(3D equivalent-volume),该模型是由一系列空间三角平面组成的三维路面,其三角平面需要3个节点组成,每个节点由其对应的X,Y,Z坐标值确定其实际位置[7];而CRG格式路面是带有路面中心线的规则栅格的路面文件,通过指定一条路径中心线和各个规则栅格节点的高程定义路面,各节点在路面纵横向的间距可随意指定,从而可以灵活地对各种路面轮廓特征进行定义。
虚拟路面重构是建立在获得路面中心轨迹和纵向5路高程数据的基础上,重点包括:(1)路面中心轨迹的复原;(2)路面横向高程数据的插值。基于对该试验场强化路面的特征分类,不同特征的路面采用不同的横向插值方法,结合各虚拟路面格式的要求,利用数据处理软件编制实现三维虚拟路面重构,其详细流程如图9所示。
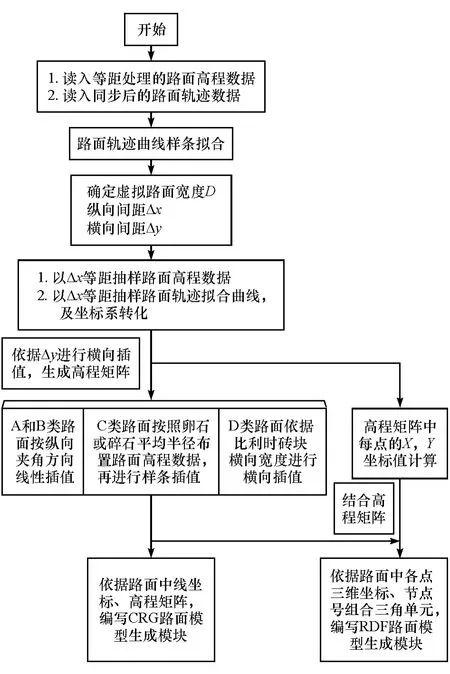
图9 三维虚拟路面重构流程图
由于路面的GPS轨迹数据精度较低,本文中利用三次样条进行插值[8],将采集的GPD数据拟合为真实的路面轨迹中线,图10为GPS数据与拟合数据对比图,实线为GPS测试路面轨迹,虚线为拟合后并按纵向间距Δx等距抽样后的路面轨迹曲线。
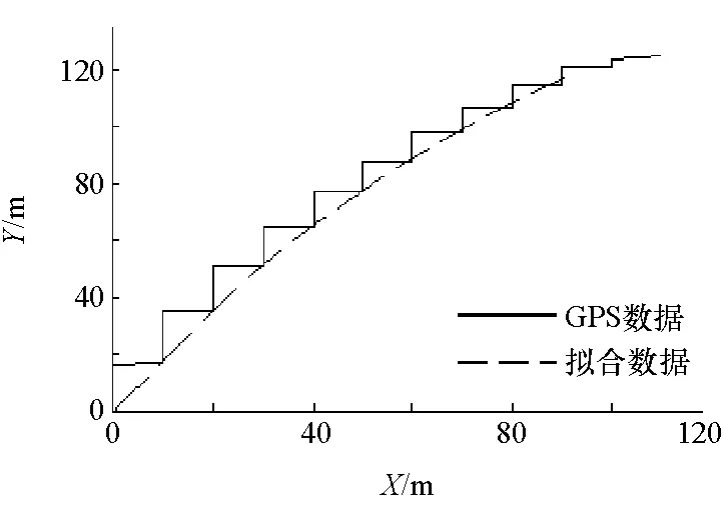
图10 GPS数据与拟合数据对比
在动力学仿真中,虚拟路面的起始点和路面方向需与整车动力学模型原点和前进方向一致,故对于拟合后的路面中线轨迹,需按照动力学模型的方向进行坐标转换,坐标转换原理如图11所示,XOY为旧坐标系,X′OY′为新坐标系,α为新旧坐标系横轴的夹角,新旧坐标系的变换关系由式(1)和式(2)确定,图12为转换前后的路面轨迹对比图。
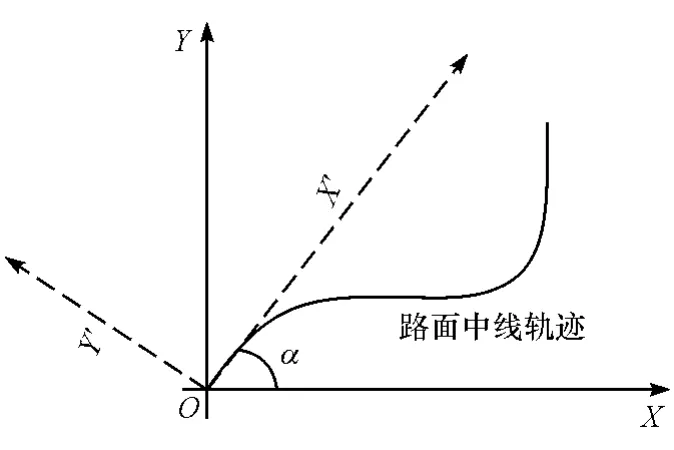
图11 路面中线坐标转化原理
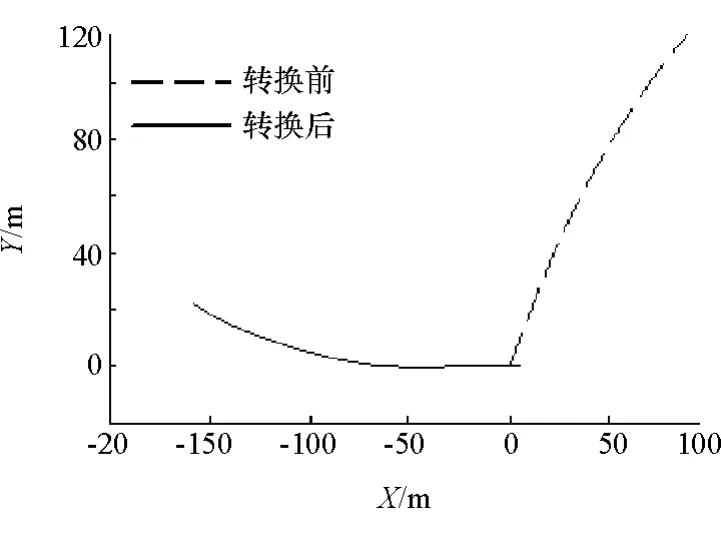
图12 转换前后路面轨迹对比图

式中:X′n和Y′n为新坐标系下第n点的坐标值;Xn和Yn为旧坐标系下第n点的坐标值。
对于RDF格式路面,需计算路面横向插值高程点的X和Y值。对于中线为直线的路面,各横断面插值点的X坐标均与该断面中线上的X坐标一致,插值点Y坐标为该断面中线上的Y坐标与该插值点在横断面离中线距离的和或差值。对于中线为曲线的路面,插值点的坐标计算较为复杂。首先,假设插值平面(图13中虚线平面)垂直于坐标系X轴,则内外插值点坐标(X′i,Y′i)和(X′o,Y′o)为

式中:Xn和Yn为已知中线坐标;T为插值距离。
其次,实际插值平面是过中线坐标点(Xn,Yn),且与中线切线垂直的平面(图13中实线平面),实际的插值平面与假设的插值平面之间的夹角β和实际内外插值点坐标(Xi,Yi)和(Xo,Yo)分别为
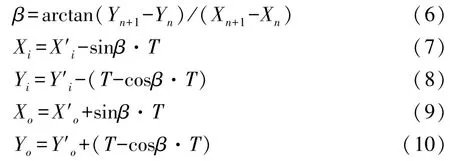
式中Xn+1和Yn+1为路面中线第n+1点的坐标值。
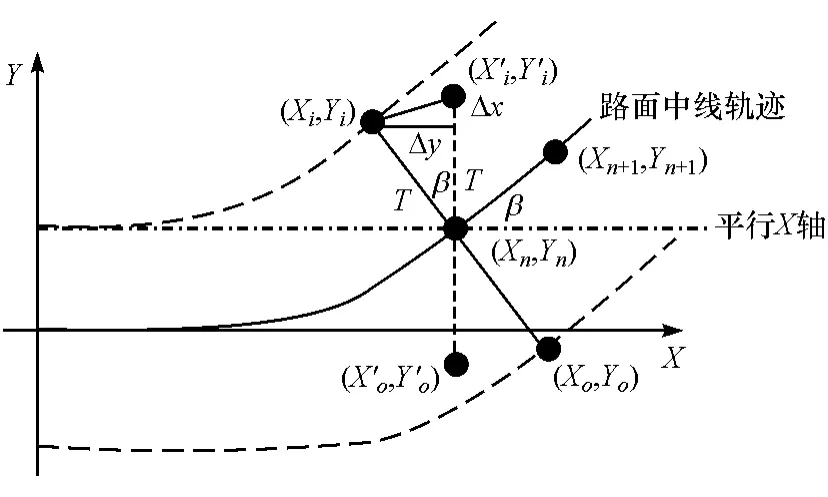
图13 曲线上插值点坐标计算原理
3 三维虚拟路面的重构与对比
3.1 各路面虚拟路面重构
路面横向几何特征的不同,横向插值方法也不同,A和B类路面主要采用线性插值方法,从而获得横断面上其它位置的高程。图14为A类路面横断面线性插值图解,由于横向几何特征在路面中线90°夹角方向一致,则依据左侧激光头1和2采集的数据H(1,n)和H(2,n)线性插值出横断面上任意位置的高程数据H(c,n),其中H(1,n)中数字1表示第1个激光传感器采集的数据,n表示第n个采集点,H(2,n)为第2个激光传感器采集的第n个高程,H(c,n)中的c表示第c条插值曲线。图15为B类路面横断面线性插值图解,根据路面横向几何特征在X方向错开距离计算出激光传感器1与2的采集点差i,再由采集数据H(1,n)和H(2,n+i)线性插值出横断面上任意位置的高程数据H(c,n+j)。图16为重构的A类型路面搓板路,图17为重构的B类型路面共振路,图18为重构的该试验场某一环道路面。
图14 A类路面插值图解
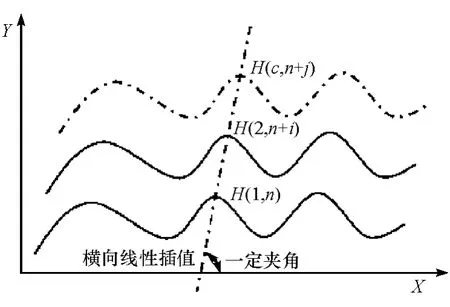
图15 B类路面插值图解
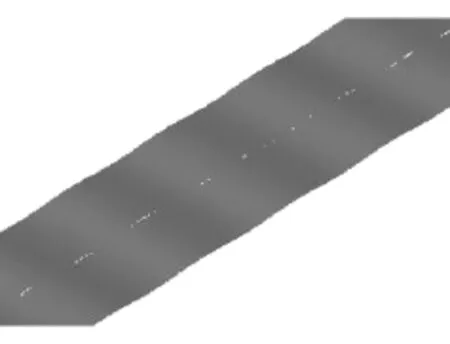
图16 搓板路虚拟路面
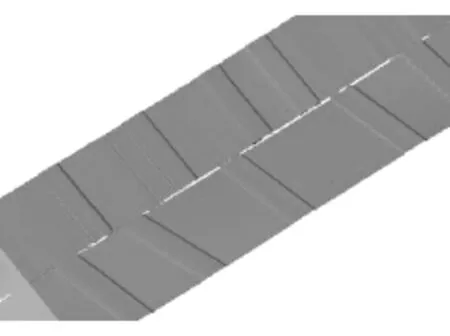
图17 共振路虚拟路面

图18 某一环道虚拟路面
C类型路面主要是鹅卵石、碎石路面,其横向几何特征随机性较大。插值原理如图19所示,将多次采集的高程数据H(1),H(2),…,H(n)按横向距离S进行排布,其中S等于卵石或碎石的平均半径,根据重新排布的高程数据,在横断面上进行三次样条插值,得到横断面上任何位置的高程数据,图20为重构的鹅卵石路面。
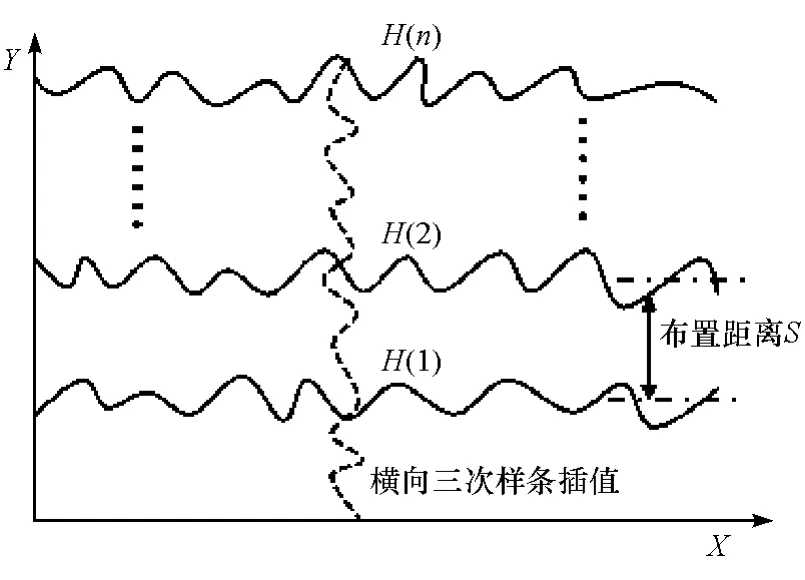
图19 C类型路面插值图解

图20 鹅卵石虚拟路面
D类型路面主要是比利时路面,其铺设的特征主要有:(1)每一个石块的尺寸不一定完全一致,但石块的横向间距和纵向间距为固定值,石块之间的间隙尺寸也为固定值;(2)石块横向缝隙对齐,纵向缝隙相互错开,任意横断面铺设的石块总数相等[9]。比利时石块在纵向错开排列仅是为提高路面的使用寿命,对载荷影响不大,因此比利时虚拟路面重构中石块纵向间隙全考虑为对齐铺设。依据该试验场比利时石块的横向宽度,利用采集的路面高程数据进行虚拟路面横向平铺,插值出横断面上任何位置的高程数据,图21为重构的比利时路面。
图21 比利时虚拟路面
3.2 两种格式虚拟路面对比分析
对RDF和CRG格式的路障和比利时虚拟路面进行对比分析,其中路障是该试验场中较短的强化路面,比利时是较长的强化路面。路障与比利时虚拟路面的基本信息详见表2,对比可知,在相同节点下的RDF文件大小为CRG文件大小的20倍以上,且随着节点数的增加,文件大小的倍数越大。

表2 路面模型基本信息
将两种格式的路障和比利时虚拟路面分别载入到动力学软件,对其加载时间和内存占用量进行对比,结果见表3。由表3可知:当路面文件较小时,RDF格式和CRG格式的加载时间、内存占用量均比较接近,两种格式均能有效地进行动力学仿真分析;当路面文件较大时,RDF格式的路面利用效率远低于CRG格式,比利时路面CRG格式加载时间仅为RDF格式的6.67%,CRG格式内存占用量仅为RDF格式的13.91%,CRG格式仍能高效地应用于虚拟路面疲劳载荷预测的动力学仿真分析。

表3 路面加载信息对比
4 结论
利用自主研发的惯性参照道路纵断剖面检测系统测试某试验场强化路面高程,结合路面的几何特征,分别采用不同的横向高程插值方法,进行了三维虚拟路面重构,所重构的虚拟路面真实地反映了路面的几何特征。其次,将RDF和CRG格式的虚拟路面加载到动力学软件,对载入时间和计算机内存占用量进行对比,反映出CRG格式路面计算效率较高,适用于对复杂强化路面的虚拟建模和基于虚拟路面的动态载荷预测动力学分析。
[1] 冯金芝,刘乐,郑松林.某轿车悬架系统的载荷仿真分析[J].汽车工程,2012,34(10):913-917.
[2] 毛显红,肖攀,陈建华,等.基于道路谱的汽车车身疲劳分析[J].计算机辅助工程,2011,20(2):75-78.
[3] 方剑光,高云凯,徐成民.车身疲劳载荷谱的位移反求法[J].同济大学学报(自然科学版),2013,41(6):895-899.
[4] YANG X,MEDEPALLI S.Comfort and durability tire model validation[J].Tire Science and Technology,TSTCA,2009,37(4):302-322.
[5] BAECKER M,GALLREIN A,HAGA H.A tire model for very large tire deformation and its application in very severe events[J]. SAE Int.J.Mater.Manuf,2010,3(1):142-151.
[6] 严金霞,张开斌,谢飞,等.基于ADAMS的非平直路面模型的重构与验证[J].汽车工程,2011,33(11):985-989.
[7] 范成建,熊光明.虚拟样机软件MSC.ADAMS应用与提高[M].北京:机械工业出版社,2006.
[8] 董霖.MATLAB使用详解[M].北京:科学出版社,2008.
[9] 付文奎.比利时石块虚拟路面建模方法的分析和比较[J].计算机辅助工程,2015,24(5):10-15.
Reconstruction and Comparative Analysis on 3D Virtual Intensified Road in a Proving Ground
Rong Bing,Xiao Pan,Zhou Jianwen&Liu Yilu
China Automotive Engineering Research Institute Co.,Ltd.,Chongqing401122
Spline interpolation is conducted on the measured data of the central line trajectory of the intensified road surface in a proving ground to restore original road surface.Based on 5 longitudinal elevation data of road measured,lateral interpolation is performed according to lateral geometric features:linear interpolation for the road with consistent lateral geometric features,spline interpolation for the road with random change in lateral geometric features,and interpolation by rule for the road with inconsistent lateral geometric features but still follows certain rule.Finally a program is developed for 3D virtual road reconstruction based on corresponding interpolation schemes. The results of further comparison between reconstructions of RDF and CRG format road show that CRG format is more suitable for 3D virtual road reconstruction and the dynamics analysis on load prediction.The more complex the road feature,the more prominent the superiority of CRG road over RDF counterpart in computation efficiency.
3D virtual road reconstruction;lateral geometric features;linear interpolation;spline interpolation
原稿收到日期为2016年1月29日,修改稿收到日期为2016年3月16日。
荣兵,硕士,E-mail:rebe0606@163.com。
10.19562/j.chinasae.qcgc.2017.02.015
猜你喜欢
福建中学数学(2023年4期)2024-01-10 06:12:47
中学生数理化·七年级数学人教版(2023年4期)2023-05-11 06:47:32
石油沥青(2022年3期)2022-08-26 09:13:12
汽车纵横(2021年3期)2021-03-18 01:29:24
西南石油大学学报(自然科学版)(2019年1期)2019-01-28 09:33:52
测控技术(2018年10期)2018-11-25 09:35:40
——书写要点(三)
学生天地(2018年33期)2018-11-08 08:38:12
无人机(2018年12期)2018-09-10 07:22:44
学生天地·小学低年级版(2018年11期)2018-01-05 02:51:32
电测与仪表(2016年10期)2016-04-12 00:26:24
