
基于RFID、视觉和UWB的车辆定位系统
2017-04-14 08:39曹立波颜凌波张瑞锋
汽车工程 2017年2期
曹立波,陈 峥,颜凌波,秦 勤,张瑞锋
(湖南大学,汽车车身先进设计制造国家重点实验室,长沙 410082)
基于RFID、视觉和UWB的车辆定位系统
曹立波,陈 峥,颜凌波,秦 勤,张瑞锋
(湖南大学,汽车车身先进设计制造国家重点实验室,长沙 410082)
在智能交通系统中获取车辆的精确位置对提升主动安全和实现无人驾驶具有重要意义。针对目前全球定位系统(GPS)和车路通信(V2I)定位方法的不足,结合射频识别(RFID)、视觉和超宽带(UWB)通信提出了一种新的车辆定位系统,目的是在GPS效果不佳的城市环境下实现车道级的定位。提出了基于RFID和视觉的车道判别算法和基于UWB的单锚点V2I定位算法。分析了单锚点V2I定位算法在典型工况下的定位误差。结果表明,在合理布置路侧单元的前提下采用该定位方法可实现直道和弯道定位误差分别在0.3和0.5m以内的定位精度。
智能交通系统;车辆定位;RFID;视觉;UWB
前言
智能交通系统(intelligent transportation system,ITS)以提高交通效率和交通安全为主要目的,而车辆定位是其中的关键技术。获取车道级的精确位置对于在ITS中提高智能车辆的安全性和实现自主驾驶都具有重要意义。
以全球定位系统(global positioning system,GPS)为代表的全球导航卫星系统(global navigation satellite system)是目前使用最广泛的车辆定位技术,可通过差分法来提高精度。伪差分全球定位系统在开阔环境下定位精度为2m左右,达不到车道级定位要求。基于载波相位的差分全球定位系统(real time kinetic differential GPS,RTK-DGPS)定位精度可达厘米级,但由于卫星信号易被遮挡,且信号丢失后恢复时间长,可靠性欠佳。实验证明城市环境中RTK-DGPS仅有少部分时间能达到此精度[1],且RTK接收机价格高达数万元,难以大规模普及。
惯性导航系统(inertial navigation system,INS)被用于车辆的航位推算,以修正GPS信号不佳时造成的定位误差,或在GPS无信号的条件下代替GPS定位。但惯性测量系统本身极易产生累积误差,例如文献[1]中测得车辆每行驶300m,INS即产生2m以上的误差,故不宜长时间使用。
随着智能网联汽车技术的发展,基于车路通信(vehicle to road/infrastructure communications,V2I)的定位方法也越来越受到重视,该方法的原理是在车辆与路侧单元(road side unit,RSU,俗称锚点)进行实时通信的同时分析信号到达时间或到达时间差等特征测得车辆与多个RSU的距离,再通过三点定位法、极大似然法和Chan算法等确定车辆位置坐标[2-8],随着超宽带(ultra wideband,UWB)通信技术的应用,其定位精度可达1m以内[9-11]。虽然该方法不受地形限制,可弥补GPS的不足,但其精度仍然无法保证将车辆定位到正确车道,且定位过程中需要车辆同时与至少3个锚点(RSU)通信,这样大大增加了V2I通信量、RSU数目和系统复杂性。文献[12]中提出了一种新型双锚点V2I定位方法,该方法利用车辆在行驶过程中与道路两侧RSU通信时信号多普勒频移的差别,判断车辆横向和纵向位置。在车速较高的情况下可实现车道级定位精度,但随着车速降低,多普勒效应减弱,定位误差显著增加甚至无法工作。因此该方法基本上不适用于低车速的城市密集路段。
另一方面,现有定位技术未计及车辆定位中优先判别车辆所处车道的重要性。车辆定位中沿横向的定位精度要求高于纵向定位精度要求,因为纵向的位置误差很容易通过预留纵向距离来补偿,而沿道路横向的距离更短,超车过程中相邻车道两车的横向距离往往只有数十厘米,这对定位设备的精度和可靠度提出了苛刻的要求。实际上,由于一条车道在同一纵向位置只能容纳一辆车,直接区分车辆所处车道比探测车辆具体横向位置更有实际意义和可行性。
针对上述定位方法的缺陷和定位到车道的要求,本文中提出了一种车辆精确定位系统,将车辆定位分解为车道判别和纵向定位两个步骤,详细描述了基于射频识别(radio frequency identification,RFID)和车载视觉的车道判别方法。在车道判别的基础上,提出了基于UWB的单锚点V2I定位算法。最后分析了该系统的定位误差和RSU布置方法。
1 定位系统框架
基于RFID、视觉和UWB的车辆定位系统(下文简称RVU定位系统)如图1所示,主要由两部分组成:基于RFID和视觉的车道判别子系统和基于UWB测距/通信的纵向定位子系统。由于该系统不依赖卫星信号,且UWB的厘米级测距精度保证了较小的纵向定位误差,故适宜在GPS信号不佳、小车距的城市密集环境下工作。
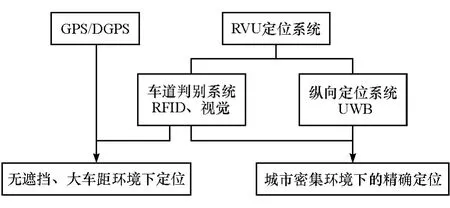
图1 RVU定位系统主体框架
其中车道判别子系统还可直接与现有的GPS/ DGPS技术结合,利用GPS/DGPS在开阔道路上的良好性能,在横向车道级定位的基础上实现米级的纵向定位精度,满足无遮挡、大车距路况下(如高速公路)的智能交通定位需求。
2 车道判别
依靠当前的通用定位技术和车辆本身的传感设备很难准确地判断车辆所处车道,随着智能交通系统的发展,更多的研究开始关注于通过V2I方式实现车道判别[12-13]。如文献[13]中提到了一种基于RFID的车道判别方法,分别在不同车道的路面上每隔6m铺设一张RFID标签,标签内容为车道序号和纵向坐标。同时在车辆的底部安装RFID阅读器,行驶过程中不断读取射频标签而获取车辆所处车道序号。虽然该方法简单可靠,但铺设过多的射频标签有可能造成道路建设和维护的困难。
另一方面,随着图像处理技术的发展,摄像头逐渐成为智能汽车的标配之一。目前利用视觉的车道线检测技术已较为成熟[14-15],多家汽车厂商(如大众、沃尔沃)基于车道线检测开发了车道偏离预警和车道保持等主动安全应用。
借鉴以上研究,本文中提出了一种将RFID和视觉相结合的车道判别算法和系统。车道判断过程如图2所示,预先在车道入口处铺设RFID标签以表明该车道的编号,最右车道编为1号车道,其他车道依次向左递增。当车辆经过某车道入口时,可通过射频阅读器读取车道编号作为车辆在该道路行驶的初始车道号N0。
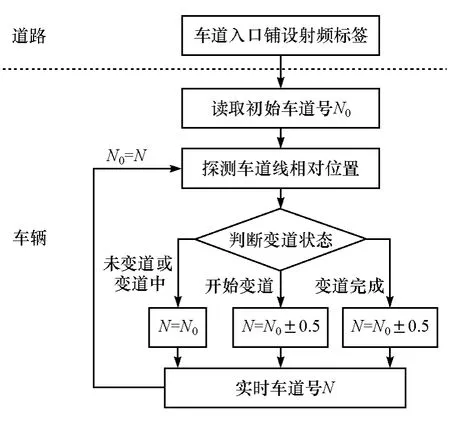
图2 车道判断过程
在车辆继续行驶的过程中,使用视觉系统检测车道线,据此判断变道状态,将初始车道号N0更新为车道号N。在摄像头获取的图像底部添加一条代表车辆宽度的横线(可通过摄像头标定得到),根据检测到的车道线(或其延长线)是否与宽度线相交和相交位置,将车道线与车辆的相对位置分为未相交、左相交、右相交3种情况,如图3所示。依据相对位置在相邻时刻的改变可判定出车辆的变道状态,具体判定规则如表1所示。若判定车辆开始向左/右变道,则更新实时车道号N=N0±0.5,此时N变为非整数,表明车辆处于两车道之间,并令此时的N作为下一时刻的N0即令N0=N;若判定向左/右变道完成,则再次更新N=N0±0.5,此时N变为整数,表示车辆完全进入另一车道(变道开始和完成方向相同)或回到原车道(变道开始和完成方向相反);若车辆未变道或仍在变道中则不更新实时车道号:N=N0。
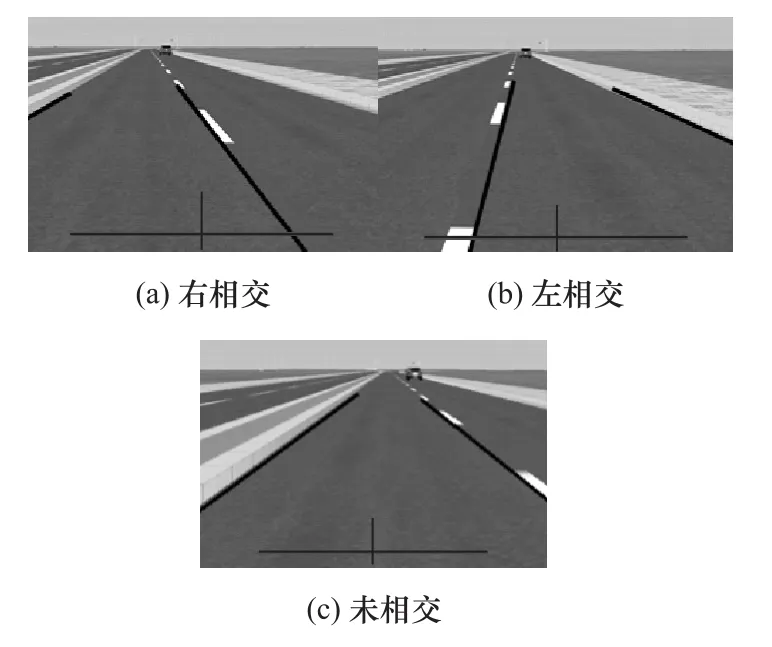
图3 车道线与车辆的3种相对位置
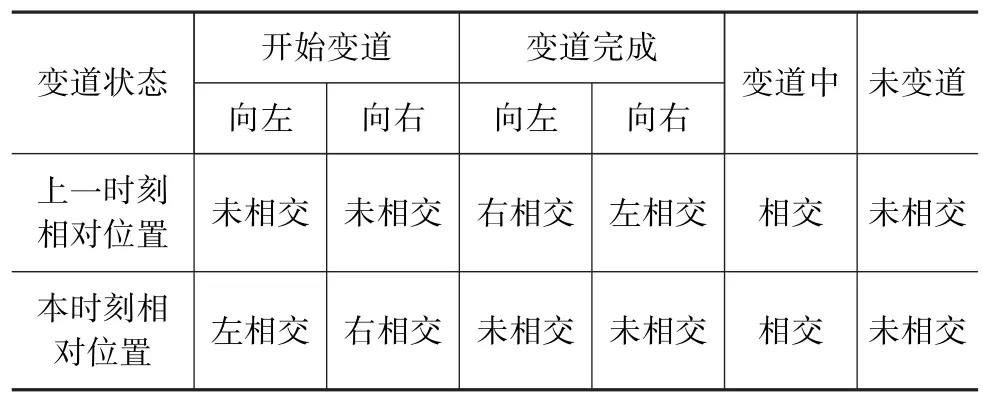
表1 变道状态判断规则
先前已开发了相应的C++图像处理程序和车道判别系统样机,并在长沙市近郊道路进行了功能验证。实验结果表明,车辆可通过RFID阅读器顺利读取路面标签内容,且在行驶过程准确判断了车道号(如图4所示)。

图4 车道判别
3 完全定位
3.1 电子地图
考虑到系统车道级的定位精度,匹配的电子地图也需要精确到车道,根据目前道路测绘所用全站仪的毫米级精度,这样的电子地图完全可实现。在该地图中所有的车道中心线和车道线都应被表示为经度α、纬度β和海拔高度H三维空间中的曲线,即

式中:β=FN(α)为该空间曲线在水平面的投影;H=GN(α,β)为路面一点的高度;N为车道号,取值为1,1.5,2,2.5等。
由前面可知,当N为整数时,式(1)对应第N车道中心线的表达式,当N为非整数时,式(1)对应两车道之间车道线的表达式。在该地图中,对于处在某一车道的车辆不再区分其横向位置,直接将车道中心线作为其近似行驶轨迹(即车辆恒处于车道中心线上);而对于正在变道的车辆则将两车道之间的车道线作为其近似行驶轨迹。
3.2 V2I单锚点定位算法
传统的V2I定位算法至少需要3个锚点以实现3点定位,而在RVU定位系统中,由于车辆行驶轨迹已知,故只须测得车辆与一个锚点的距离即可实现完全定位。
单锚点V2I定位过程如图5所示,车辆根据所处车道调取其式(1)行驶轨迹,同时通过UWB与RSU进行实时通信,获取路侧单元UWB天线的坐标(α0,β0,H0),并测得两者之间距离R,则可知车辆位于以RSU为原点,以R为半径的球面与车辆行驶轨迹的交点上。联立方程:
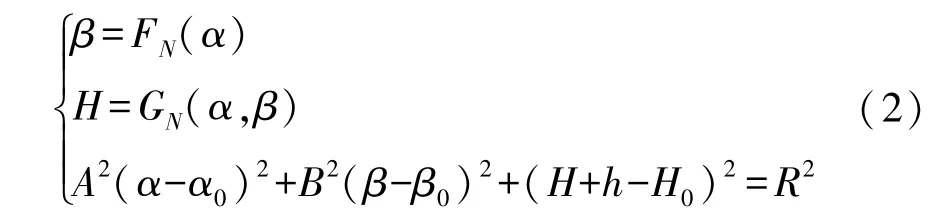
式中h为车载UWB天线距离地面的安装高度。
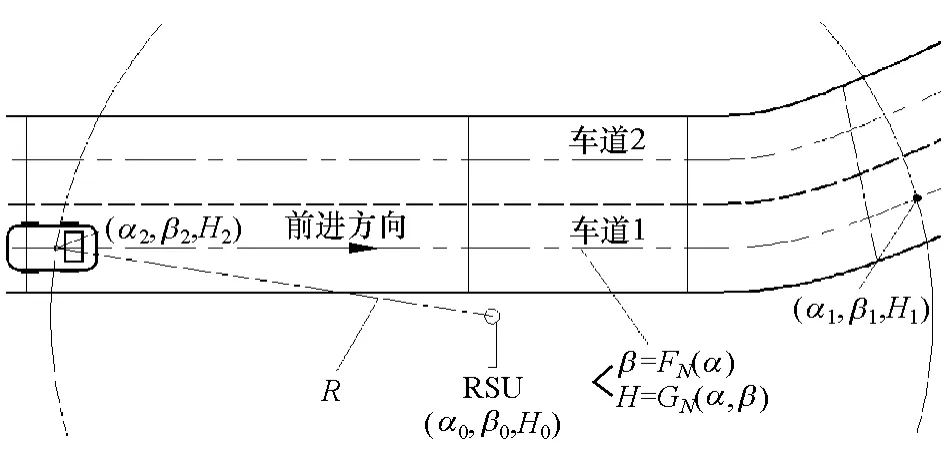
图5 单锚点V2I定位过程
解方程组得到(α1,β1,H1)和(α2,β2,H2)两个交点坐标,再选取在前进方向上离上次定位结果较近的交点(α2,β2,H2)作为车辆实际位置,若是首次定位则选取靠近道路入口的点。
对于大部分城市道路,路面在单一RSU覆盖范围内起伏极小,即H≈常数,则式(2)可简化为

式中:A为当地的经度差值与水平距离差值的换算因子;B为纬度差值与水平距离差值的换算因子;h′为路侧单元UWB天线距离地面的安装高度。
4 V2I定位误差分析
RVU定位系统在横向只需判断车辆所处车道,所以主要考虑纵向定位误差。本节先讨论单锚点V2I定位算法的误差来源,建立直道和典型弯道两种误差模型,然后根据式(2)推导出误差表达式,分别计算两种情况下的最大误差。
4.1 误差来源
在数字地图足够精确的情况下,V2I定位的主要误差来源是:(1)UWB测距误差ΔR;(2)车辆偏离理想行驶轨迹的距离Δd。
4.1.1 测距误差
为探究UWB测距误差,对某款UWB芯片进行了测距试验,该芯片基于市面流行的DWM1000型UWB无线收发模块开发。DWM1000模块主要参数见表2。
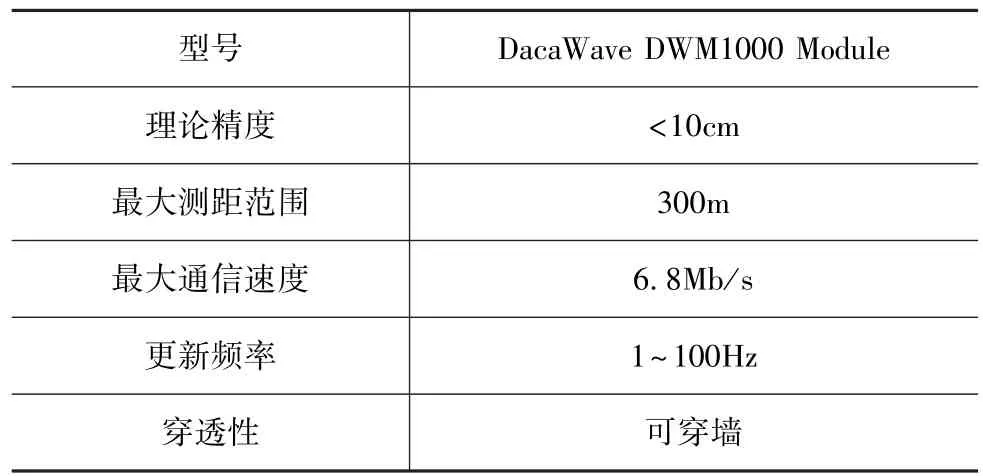
表2 DWM1000模块主要参数
该试验在长沙市潇湘中路旁人行道进行,以模拟城市道路环境中的噪声干扰。由于直线路段长度有限,仅对0~200m内的测距误差进行测试。将一块UWB芯片固定作为锚点,将另一块芯片摆放在不同位置的测点上。距锚点每隔10m设置一个测点,在每个测点上记录10次测距结果。
试验完成后经数据处理,得到不同测点的测距误差平均值(绝对值,下同)和方差,如图6所示。随着UWB芯片之间的距离增加,测距误差有变小的趋势,但并不显著,可以认为在200m范围内UWB的测距误差与目标远近无直接关系。全部200次测距的平均误差μ=0.0563m,标准差σ=0.0699,设在定位过程中UWB测距误差符合正态分布,则可认为在一般情况下(95%概率),UWB最大测距误差ΔRmax=μ+1.64σ=0.17m。
图6 测距试验结果
4.1.2 横向偏离量
在RVU定位系统中总是默认车辆处于理想的横向位置(车道中心线或车道线上),而车辆在实际行驶过程中难免会偏离理想行驶轨迹,从而造成纵向定位误差。车辆最大横向偏离量的计算式为

式中:D为车道宽度,城市道路为3.5m;W为车辆宽度,轿车取值为1.6~1.8m。
算得当W=Wmin=1.6m,且N为整数时,Δdmax取得最大值0.95m。
4.2 误差模型
4.2.1 直道
令式(2)中的h=h′,简化为平面定位情况。直道误差模型如图7所示,假设RSU(α0,β0,)正北方有一东西向直线型三车道道路,道路中心与RSU的距离为d,故车道中心线表达式为

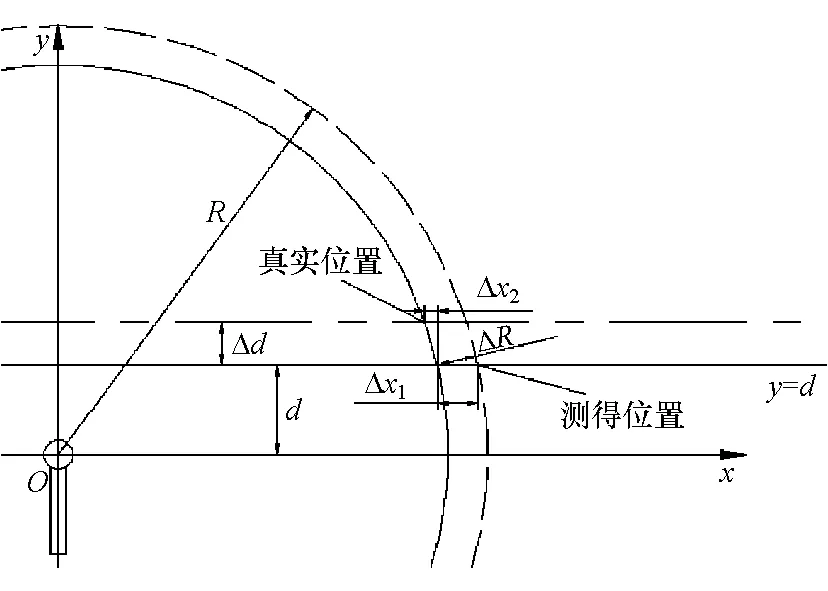
图7 直道误差模型
令y=B(β-β0),x=A(α-α0),设测得车辆与RSU之间距离为R,则式(2)简化为

解得车辆纵向位置:

记测距误差ΔR造成的定位误差为Δx1,车辆偏离车道中心线距离Δd造成的定位误差为Δx2,则两误差绝对值为

显然当两种误差同符号时,总误差Δx达到最大,即

4.2.2 典型弯道
由于不同道路的弯道曲率各不相同,所以选取一典型圆弧弯道做误差分析。对于连接直道和圆弧弯道的缓和曲线道路,设其误差介于直道和圆弧弯道之间。参考道路设计规范[16],圆弧弯道半径一般不得小于道路设计速度所限定的不设超高最小半径值,设计车速越高的弯道其设计半径也应越大(见表3)。由于城市道路的设计车速为40~60km/h,故选取设计车速40km道路的最小半径300m作为典型弯道半径进行误差分析,一般弯道由于半径更大,定位误差会更接近于直道情况。

表3 不同设计速度的道路所对应的最小弯道半径
弯道误差模型如图8所示,设有一圆弧型三车道道路中心线半径为r,其圆弧原点处于RSU正北方且与RSU的距离记为d,同样令y=B(β-β0),x=A(α-α0),车辆与RSU之间距离为R,则式(2)简化为
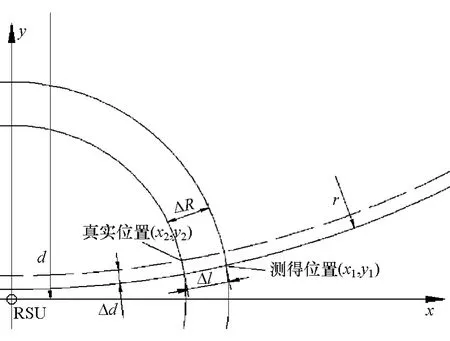
图8 弯道误差模型
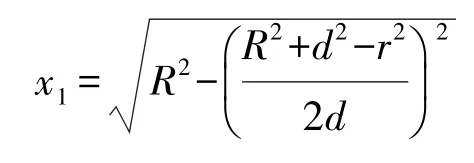
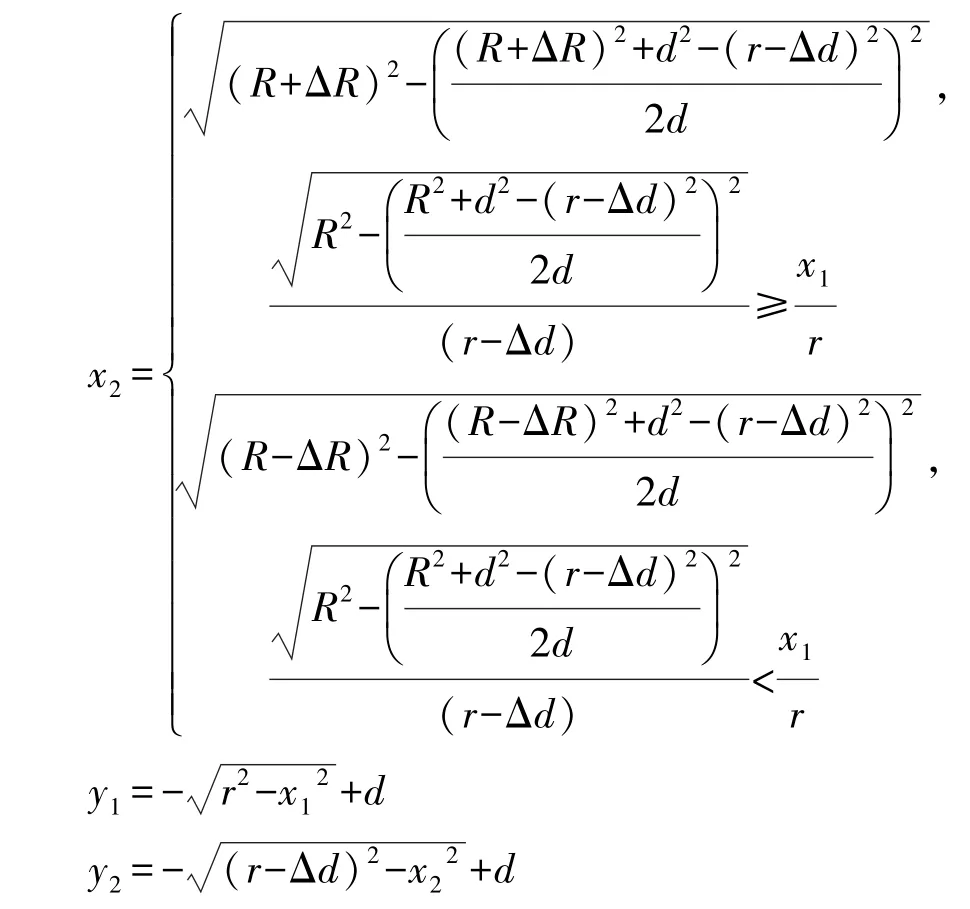
设测得位置坐标为(x1,y1),实际位置坐标为(x2,y2),解得纵向定位误差为

其中:
4.3 误差计算
考虑系统在极端不利情况下的定位误差,将ΔRmax=0.17m,Δdmax=0.95m分别代入式(10)和式(12),算得系统对不同车道上车辆定位的最大误差曲线,如图9所示。虽然UWB测距误差和车辆横向偏移量不随车辆与RSU之间距离R变化,但单锚点V2I定位算法本身导致了在R较小时(<40m)定位误差的急剧增大。为了规避这种情况,车辆应只利用离自身较远的RSU进行定位。而为了保证车辆的连续定位精度,RSU须以交叉定位方式布置(如图10所示),在该布置方式中,每个RSU仅对设定的最小定位范围Rmin以外的车辆提供定位信息,而更近的车辆则由相邻的RSU定位。例如图中RSU 1只对距其较远的区域1内的车辆进行定位,而距其较近区域内的车辆则由相邻的RSU 2负责定位。
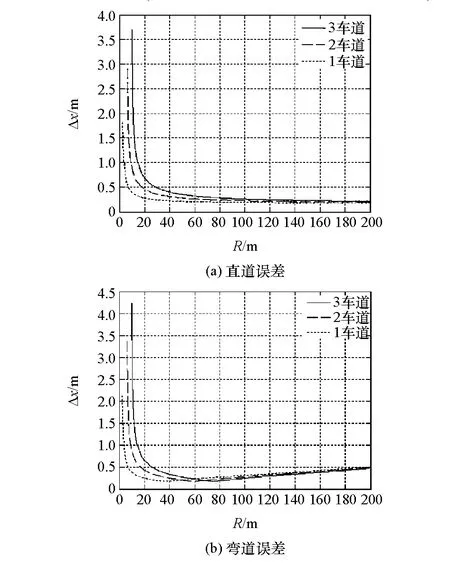
图9 系统最大纵向定位误差曲线(ΔR=0.17m,Δd=0.95m)
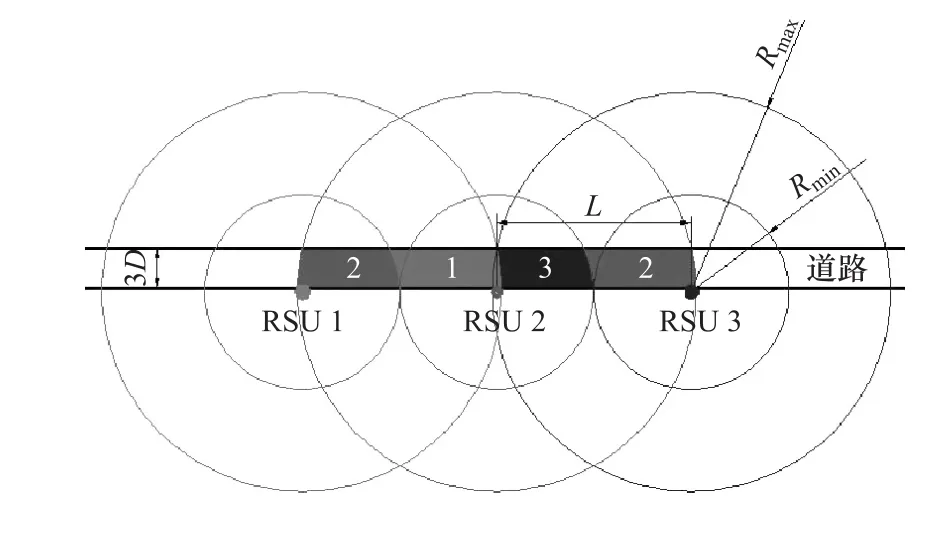
图10 交叉测距的RSU布置方式
RSU间距L为

三车道道路的最小定位范围Rmin为
由图9可知,在此情况下,RVU系统的三车道直道最大定位误差出现在R=100m处,且均小于0.3m,典型弯道最大定位误差出现在R=200m处,且均小于0.5m。系统可满足主动安全应用和自动驾驶的定位精度要求,具备可行性。
5 结论
本文中剖析了车辆定位的需求,识别车辆所处车道并保证车辆纵向定位精度,由此提出一种新的车辆定位方法和系统,该系统利用RFID和车载视觉识别车辆所处车道,通过车辆与路侧单元的通信测得两者之间的距离,然后由单锚点V2I定位算法算得车辆在道路上的纵向位置;对该算法在典型环境下的定位性能进行了分析,由此制定了路侧单元布置策略,并通过计算证明了通过合理布置路侧单元能达到直道定位误差0.3m、弯道0.5m以内的定位精度。RVU定位系统所需的RSU数目和通信量比传统V2I定位系统少,且具备定位到车道的能力;而相比RTK-DGPS技术又具有全地形定位的优点和硬件成本优势。这些特点使RVU定位系统更有可能在ITS中发挥重要作用,促进车辆主动安全的提升和无人驾驶的实现。
本定位系统还有许多尚待完善之处,比如文中仅对静态误差进行了分析,而实际上车辆定位精度往往都会受移动速度的影响,所以有必要试验研究本定位系统对运动车辆的动态误差,进而开发减小动态误差的算法;另外本系统对于车辆的定位依赖于车道线,对于没有车道线的区域(如交叉路口)仍须使用传统定位方法(如三点定位),故实现与其他定位方法在不同路段的衔接也是本定位系统应用于智能交通系统需解决的问题。
[1] JIMÉNEZ F,NARANJO J E,GARCÍA F,et al.Limitations of positioning systems for developing digital maps and locating vehicles according to the specifications of future driver assistance systems [J].IET Intelligent Transport Systems,2011,5(1):60-69.
[2] 彭宇,王丹.无线传感器网络定位技术综述[J].电子测量与仪器学报,2011,25(5):389-399.
[3] KUMAR P,REDDY L,VARMA S.Distance measurement and error estimation scheme for RSSI based localization in wireless sensor networks[C].Wireless Communication and Sensor Networks(WCSN),2009 Fifth IEEE Conference on.IEEE,2009:1-4.
[4] CACERES M,SOTTILE F,SPIRITO M A.WLAN-based real time vehicle locating system[C].Vehicular Technology Conference,2009.VTC Spring 2009.IEEE 69th.IEEE,2009:1-5.
[5] 赵泰洋,郭成安,金明录.一种基于RFID原理的交通信息获取系统与车辆定位方法[J].电子与信息学报,2010,32(11):2612-2617.
[6] 任盈之,刘熙,张欣.超高频RFID定位的相位式测距方法研究[J].单片机与嵌入式系统应用,2014,14(5):36-38.
[7] HUANG J,LI X,SUN Y,et al.A highly-reliable combined positioning method for vehicle in urban complex environments[C].Vehicular Electronics and Safety(ICVES),2013 IEEE International Conference on.IEEE,2013:153-158.
[8] PAUL J,MALHOTRA B,DALE S,et al.RFID based vehicular networks for smart cities[C].Data Engineering Workshops(ICDEW),2013 IEEE 29th International Conference on.IEEE,2013:120-127.
[9] HASSAN O,ADLY I,SHEHATA K A.Vehicle localization system based on ir-uwb for v2i applications[C].Computer Engineering&Systems(ICCES),2013 8th International Conference on.IEEE,2013:133-137.
[10] LEUNE T,WEHS T,JANSSEN M,et al.Wireless locating and data communication in harsh industrial environments[C].Emerging Technologies&Factory Automation(ETFA),2012 IEEE 17th Conference on.IEEE,2012:1-4.
[11] 张霆廷,张钦宇,张乃通.一种基于能量加权检测的UWB测距方法[J].电子与信息学报,2009,31(8):1946-1951.
[12] ALAM N,BALAEI A T,DEMPSTER A G.An instantaneous lane-level positioning using DSRC carrier frequency offset[J]. IEEE Transactions on Intelligent Transportation Systems,2012,13 (4):1566-1575.
[13] ZHANG E,JIANG W,KUANG Y,et al.Active RFID positioning of vehicles in road traffic[C].Communications and Information Technologies(ISCIT),2011 11th International Symposium on.IEEE,2011:222-227.
[14] KIM Z W.Robust lane detection and tracking in challenging scenarios[J].Intelligent Transportation Systems,IEEE Transactions on,2008,9(1):16-26.
[15] LÓPEZ A,SERRAT J,CAÑERO C,et al.Robust lane markings detection and road geometry computation[J].International Journal of Automotive Technology,2010,11(3):395-407.
[16] CJJ 37—2012城市道路工程设计规范[S].北京:中国建筑工业出版社,2012.
Vehicle Positioning System Based on RFID,Vision and UWB
Cao Libo,Chen Zheng,Yan Lingbo,Qin Qin&Zhang Ruifeng
Hunan University,State Key Laboratory of Advanced Design and Manufacturing for Vehicle Body,Changsha410082
To obtain the accurate location of vehicles in intelligent transportation systems has important significance to enhancing active safety and implementing autonomous driving.In view of the defects of present global positioning system(GPS)and vehicle-to-infrastructures(V2I)positioning technology,a novel positioning system is proposed by combining radio-frequency identification(RFID),vision and ultra-wideband(UWB)communications,aiming at realizing lane-level positioning in urban environment with poor GPS effects.Both algorithms of lane judgment based on RFID and vision and single RSU V2I positioning based on UWB are put forward,with the error of single RSU V2I positioning in typical conditions analyzed.The results indicate that the proposed system with rational arrangement of RSUs can achieve a positioning accuracy with an error less than 0.3m for straight road and 0.5m for curved road respectively.
intelligent transportation systems;vehicle positioning;RFID;vision;UWB
原稿收到日期为2016年3月22日。
陈峥,硕士研究生,E-mail:cz1991@hnu.edu.cn。
10.19562/j.chinasae.qcgc.2017.02.017
猜你喜欢
——《艺术史导论》评介
美育学刊(2022年5期)2022-10-18
导航定位学报(2022年5期)2022-10-13
导航定位学报(2022年5期)2022-10-13
导航定位学报(2022年4期)2022-08-15
导航定位学报(2021年4期)2021-08-29
电子技术与软件工程(2020年22期)2021-01-30
数字技术与应用(2020年12期)2021-01-22
移动通信(2020年5期)2020-06-08
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
