水下升降剖面仪绞车系统结构设计
2017-03-08 06:32郭平安米智楠
装备制造技术 2017年12期
郭平安,米智楠
(同济大学机械与能源工程学院,上海201804)
水下升降剖面仪是用于在海洋中对某监测点垂直水柱温、盐、深等各种参数进行剖面观测的仪器,对科学研究及国防安全等具有重要意义。水下升降剖面仪主要有爬缆式和绞车式。其中,绞车式水下升降剖面仪及其绞车系统在国外的研究起步较早,技术成熟且结构形式多样,主要研究机构有伍兹霍尔研究所、华盛顿大学、俄勒冈大学等[1-4]。市场化的水下升降剖面仪绞车产品主要有美国Interocean公司的VPS系列,日本NiGk公司的AES系列。目前国内在这方面的研究起步较晚,研究较少,主要研究机构有国家海洋技术中心、中船重工710研究所以及中国海洋大学[5-7]等,但其研究的产品体积较大,结构尺寸不紧凑,且还没有形成市场化的产品。
绞车式水下升降剖面仪主要依靠绞车系统的收放缆实现整个剖面仪的上升和下降,在上升和下降过程中,剖面仪进行观测作业,因此绞车系统是整个水下升降剖面仪结构的核心组件。本文将对绞车系统的主要机械结构进行设计,以保证水下升降剖面仪进行顺利的升降作业。
1 绞车系统结构总体组成
水下绞车系统是一项海洋工程实用技术,它涉及系留浮体的姿态控制、绞车电机及其控制技术、机电结构系统、收放缆技术以及耐腐蚀等一系列技术,是一个复杂的机电一体化系统[7]。如图1所示,绞车系统机械结构主要由水下驱动电机、滚筒、排缆机构以及传动系统等组成。工作时,电机驱动绞车滚筒旋转,缠绕在滚筒上的缆绳随着滚筒的旋转实现收放,同时排缆装置的导向活销单元左右平移以实现缆绳在滚筒上的整齐排列,随着缆绳的收放,整个水下升降剖面仪便实现上浮或者下潜。
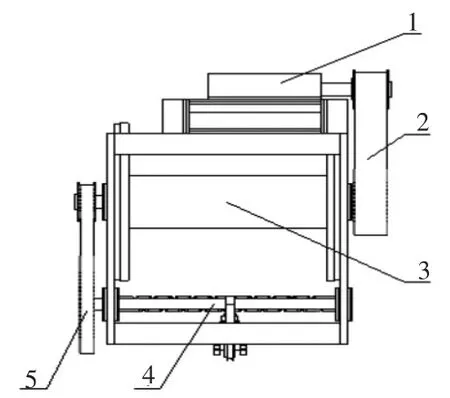
图1 绞车系统结构示意图
2 绞车滚筒
绞车的滚筒主要用于缆绳的缠绕,其设计所需要考虑的主要有材料、滚筒的长度、直径以及两端挡盘的直径等。对于材料的选择,一般的水下绞车系统可以选择使用铝合金,极少数要求较高的场合可以选择钛合金,一些要求较低的场合也可选用不锈钢[8]。鉴于钛合金的成本较高以及不锈钢的重量较重和在海水中耐腐蚀性较低的特性,最终选择铝合金作为绞车滚筒材料即可满足受力、耐腐蚀、轻量化等方面要求。绞车的滚筒主要由三部分组成,分别为滚筒主体(即中间缆绳缠绕区)、两端挡盘以及滚筒轴,滚筒选用光面滚筒。
如图2所示,滚筒的基本尺寸有滚筒长度L,滚筒有效宽度B,滚筒直径D0以及挡盘直径Dm等。上述基本尺寸可根据结构紧凑性要求以及排缆长度等要求初步选择,然后进行详细计算:
计算卷筒可排缆长度l为[9]:

式(1)中,t=d+a(绕距即排缆间距);d为缆绳直径,a为圈间间隙;n为缆绳总层数为:

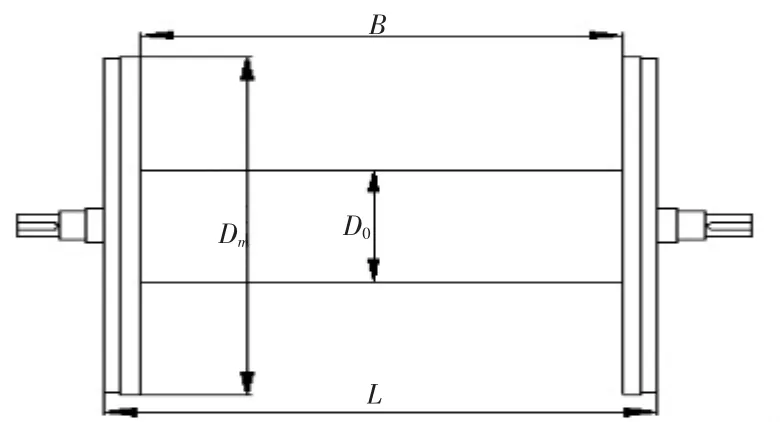
图2 滚筒示意图
3 排缆单元
在整个绞车系统中最核心的结构是排缆单元。当缆绳在滚筒上一层层缠绕时,如果没有专门的排缆单元来引导缆绳在滚筒上的排列,那么缆绳同层之间的绕距(即排缆间距)就会稀疏不均匀,浪费滚筒的绕绳空间,并且同层缆绳之间或者相邻层缆绳之间会出现相互交叉缠绕,影响顺利作业。因此,需要设计一种专门的排缆单元来引导缆绳在滚筒上的整齐紧密排列。排缆单元一般分为手动排缆和自动排缆,水下剖面仪采用自动排缆技术实现缆绳的排放和回收。
如图3所示,自动排缆单元的基本组成有:导向光杆、双向丝杠、导向活销单元、动力单元(传动系2)等。导向活销卡在双向丝杠的螺旋槽中,缆绳从滚筒缠绕后穿过导向活销单元。当绞车工作时,滚筒和双向丝杠同时旋转,在螺旋副的传动作用下,导向活销单元沿着导向光杆左右来回移动,且导向活销单元与缆绳在滚筒上的左右平移同步。
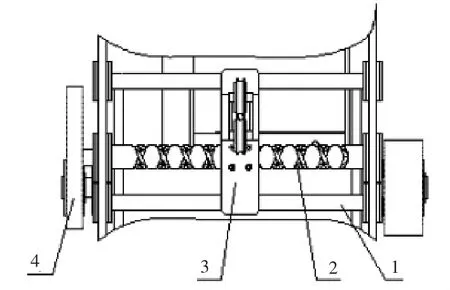
图3 自动排缆单元结构示意图
3.1 双向丝杠与活销
双向丝杠是一个具有左右螺旋的螺杆,左右螺旋相互对称,螺距相同,其沟槽曲线是圆柱面上的螺旋线,沟槽截面为矩形,如图4所示。在双向丝杠的两端连接换向处,必须设计成具有一定半径的过渡圆弧形式(见图4),这是为了活销在通过两端换向时能够顺利通过,不受阻碍和冲击;若丝杠两端设计成如图5所示的尖角时,会造成对活销的阻碍,不能顺利换向,且产生较大冲击,严重时会损坏活销头,甚至扯断缆绳。

图4 双向丝杠(过渡圆弧)
图5 双向丝杠(尖角)
双向丝杠的主要尺寸是外径d1、内径d2、螺距p.螺杆的上述尺寸d1、d2和p与活销对螺杆的包角θ有关,必须统筹考虑。图4中,左右螺旋在丝杠上每隔一段距离有一个十字交岔口,为了确保活销能够顺利通过此交岔口,而不致错道,应使活销的包角θ满足条件[10]:

此外,由机械原理知道,任何螺杆的正常运转条件为:

式(3)和式(4)中,b1为左右螺旋交岔口轴向宽度;αm为丝杠中径螺旋角;dm为丝杠中径为摩擦角,ρ=αrctanμ,μ为摩擦系数。综合式3和式4可得活销配合的双向丝杠的螺距p取值范围为:

根据轮廓外形,适合应用于实际的活销有圆弧轮廓的活销和菱形轮廓的活销。两种轮廓的活销相比,圆弧形轮廓的活销可与槽面更好的相切,且运动中冲击较少,因此选用圆弧形轮廓的活销。
如图6所示,为所设计活销的主视图和上视图,图中标注了活销的主要设计计算参数。活销长度Lb的计算与活销包角θ和左右螺旋交岔口较长对角线长度有关,由下式计算:
图6 活销上视图和主视图

r1为丝杠内径d2的一半;弓形高
活销宽度b一般取比螺旋槽截面沟槽宽度小0.15~0.3 mm,活销两侧圆弧的半径R为:

对丝杠端部过渡曲线的主要要求是其与活销之间的压力角应尽量小,通过分析计算求丝杠端部过渡圆弧的半径Rd如下:

3.2 动力单元
自动排缆单元工作时,基本运动是:双向丝杠旋转,通过螺旋副带动导向活销单元左右平移。双向丝杠的驱动方式一般有独立驱动方式或者与其他运动部件通过传动系统连接共用动力源。独立驱动一般是使用独立的步进电机或者伺服电机与丝杠相连,由电机直接驱动双向丝杠旋转。但是这种驱动方式会增加设备成本和结构尺寸以及控制系统的复杂性,对控制系统的精确性要求也较高。由于采用机械传动将滚筒与丝杠相连,由滚筒的旋转带动丝杠旋转即可满足使用,且机械传动的方式安全性较高,成本较低,因此采用此方式驱动双向丝杠旋转,如图1所示的传动系2.
对于传动方式的选择,综合考虑选择圆弧齿形的同步带传动,传动系1和2均采用此传动方式,其除具有一般带传动优点外,传动比稳定,且耐腐蚀能力强,整体重量也可以较轻,是兼具普通V带、平带传动以及链传动优点的一种啮合性带传动圆弧形同步齿形带传动。除此之外,相比链传动重量较轻,无噪声,耐腐蚀性强;相比多级齿轮传动,结构也较简单,重量也较轻。在传动参数的计算中,主要是传动比的计算,因为这关系到导向活销单元是否能与缆绳左右平移保持一致。
导向活销单元轴向平移速度v2为:

将滚筒绕线看成是近似的螺旋传动,其中螺距p0即等于前文所述排缆间距t,设缆绳沿滚筒轴向平移的速度为v0,欲使导向活销单元与缆绳左右平移同步,则有 v0=v2,即

其中,n2为双向丝杠转速,n1为滚筒转速,最终得传动比为:

传动系统其余参数分析计算参照带传动设计手册进行[11]。
4 三维建模及运动仿真
经过一系列分析计算之后,根据计算的数据结果及整体剖面仪的尺寸分配,在SolidWorks软件中对绞车结构系统进行三维建模,如图7所示。使用SolidWorks Motion模块对模型进行运动仿真,以验证所设计的绞车结构是否满足运动规律要求。设定电机转速为60 r/min,得到滚筒角速度曲线如图8所示;由于活销与双向丝杠之间在模型中的配合是不规则配合,难以进行正常的运动仿真,所以采用单独的丝杠螺母副模拟活销单元与双向丝杠进行运动仿真,近似得到活销水平位移曲线如图9所示。

图7 绞车三维模型
图8 滚筒角速度曲线

图9 活销单元水平位移曲线
通过动画仿真,绞车传动系统的运动符合预期,活销单元在5 s内水平平移了25 mm,根据所设计排缆间距t为10mm,图8角速度数据,通过公式10计算得出在5 s内滚筒转了2.47转,即此时排缆2.47转,缆绳水平位移为24.7 mm,说明活销单元与缆绳左右平移基本保持一致。
5 结束语
在水下升降剖面仪绞车系统结构设计中主要面临的问题有:
(1)在海洋中工作时,对于结构材料的选择要有较强的抗海水腐蚀的能力,且为了减小整机功率,应尽量选用轻量化的材料,比如铝合金或者钛合金等;
(2)在排缆单元设计中,对双向丝杠根据具体参数详细设计,丝杠两端沟槽采用圆弧过渡,保证导向活销单元能够平稳顺利换向。
通过对设计的绞车采用Solidworks建模及运动仿真可知,所设计的传动系统符合设计预期,为水下升降剖面仪绞车系统设计提供了借鉴。在后续研究中,还需进一步采用实体试验验证该绞车系统的整体性能。
[1]F.T.Thwaites,S.M.Gallager,C.S.Davis,A.M.Bradley,A.Girard,and W.Paul.A Winch and Cable for the Au tonomous Vertically Profiling Plankton Observatory[C]//Oceans.IEEE,2002(1):32-36.
[2]Ned C.Forrester,Roger P.Stokey,Christopher von Alt,Ben 6.Allen,RobertG.Goldsborough,Michael J.Purcell,Thomas C.Austin.The LEO-15 Long-Term Ecosystem Observatory:De sign And Installation[C]//Oceans.IEEE,2002(2):1082-1088.
[3]Eric McRae.Continuous Real Time Scanning of the Upper OceanWater Column[C]//Oceans.IEEE,2016:1-6.
[4]A.H.Barnard,J.A.Barth,M.D.Levine,B.K.Rhoades,etc.The Coastal Autonomous Profiling and Boundary Layer System(CA PABLE)[C]//Oceans.IEEE,2010:1-7.
[5]丁晶磊,梁 捷,张文良,等.单点系留式垂直测量系统水动力仿真[J].海洋技术学报,2017,36(1):97-102.
[6]黄高扬,聂晓敏.无人值守式水下绞车系统研究[J].水雷战与舰船防护,2010,18(1):43-46.
[7]柴 瀛.坐底自升降式水下绞车控制系统的研制[D].青岛:中国海洋大学,2015.
[8]Stephen M.Pearlman,David R.Gordon Michael D.Pearlman.Winch Technology-Past Present and Future A Summary of Winch Design Principles and Developments.http://www.inte roceansystems.com/winches/customized-winch-design/winchdesign principles-developments.
[9]多佐尔采夫,萨福诺夫著.多层绕索绞车卷筒尺寸的确定[J].方健儿译,赵婉婉校.机电设备,1985(8):44-45.
[10]胡文伟.关于双向螺杆与活销的若干问题[J].渔业现代化,1985(1):29-32.
[11]常德功,樊智敏,孟兆明.带传动和链传动设计手册[M].北京:化学工业出版社,2010.
猜你喜欢
机床与液压(2022年8期)2022-09-19
机械工程师(2022年7期)2022-07-15
航空学报(2021年9期)2021-10-20
商品与质量(2020年48期)2020-11-26
船舶标准化工程师(2020年5期)2020-10-17
汽车实用技术(2020年4期)2020-04-10
上海海事大学学报(2019年4期)2019-12-30
中国港湾建设(2017年11期)2017-12-19
科技与企业(2015年18期)2015-10-21
船海工程(2013年6期)2013-03-11