
混合动力公交车驾驶员驾驶特性辨识算法
2017-03-08 08:32朱道伟
军事交通学院学报 2017年2期
严 英,朱道伟,叶 鹏,杨 钢
(1.天津职业技术师范大学,天津300222; 2.军事交通学院 军用车辆系,天津300161;3.军事交通学院 科研部,天津300161)
● 车辆工程 Vehicle Engineering
混合动力公交车驾驶员驾驶特性辨识算法
严 英1,朱道伟2,叶 鹏3,杨 钢2
(1.天津职业技术师范大学,天津300222; 2.军事交通学院 军用车辆系,天津300161;3.军事交通学院 科研部,天津300161)
针对混合动力公交车驾驶员驾驶特性与标准控制参数不匹配而导致车辆续驶里程降低的问题,研究同一道路工况下的驾驶员驾驶行为特征参数描述方法以及驾驶员驾驶特性辨识算法。通过提取时域场中与能耗相关的特征变量,构建基于高斯混合模型(GMM)算法的驾驶员驾驶特性辨识模型。结果表明:踏板开度的倒频谱信号比时域信号更能反映驾驶员的驾驶倾向;基于特征变量的时频域信号,并结合线路运行特征优化模型参数,最终模型辨识精度高于93%。
混合动力公交车;驾驶特征;高斯混合模型;驾驶员辨识
推广混合动力公交车是缓解能源危机和减少环境污染的有效途径之一。但在混合动力公交车实际运行中,即使在同一运营线路上,同一车队的混合动力公交车能耗差异也很大。相关研究指出,驾驶员行为对电动汽车能耗有重要影响,即使在相同的路况下,不同驾驶员驾驶同一目标车辆,能耗差别仍高达30%。在电池技术没有大突破的前提下,如果能识别驾驶员驾驶行为特性,并对不合理驾驶操作主动管理,可提供最大的能量优化潜力[1]。文献[2]指出在整个工况车辆平均车速相同的前提下,驾驶员对加速/制动踏板的操作差异会影响电动汽车的整体能耗表现。文献[3—4]表明在车辆行驶过程中,基于踏板开度等相关信息区分驾驶员驾驶类型是可行的。此外,驾驶特性辨识能提高驾驶辅助系统(如自适应巡航系统)的可靠性和驾驶舒适性[5]。
固定线路上的公交车驾驶员有着各自不同的驾驶习惯,构成该线路上的驾驶员驾驶特性样本库。驾驶特性辨识的目标,是给出当前驾驶员在已知驾驶特性样本库的类型,是混合动力控制策略自适应驾驶员驾驶习惯的前提。本文围绕驾驶员驾驶行为特性展开研究,研究固定运营线路的混合动力公交车实时运行状态下的驾驶员驾驶特性辨识算法,为进一步提高混合动力公交能量策略的适应性提供优化方向。
1 样本数据筛选
研究样车为串联混合动力公交车,运行路线站点多、平均车速慢,共选取5个样本驾驶员,编号A—E。采用车载数据采集设备获得车辆运行数据。
1.1 站点距离统计
研究对象运行线路全长16.8 km,包含26个公交站点和44个路口(含红绿灯)。分析发现,该公交线路平均启停距离(站点和红绿灯停车)为200 m,最长的运行间距为982 m,最小距离不足70 m。由于车辆驾驶员需按照公交车行车任务操作车辆,较长的运行间距数据样本有利于体现其内在的驾驶倾向[6]。
1.2 公交车运行时间分析
分析样车运行时长情况,运行工况呈现出明显的特点,可定义为拥堵期和通畅期。工作日的早晚高峰属于拥堵期,工作日的7:00以前、19:00以后的时间以及休息日的10:00以前的时间段可归为通畅期。公交线路运行时长情况见表1。
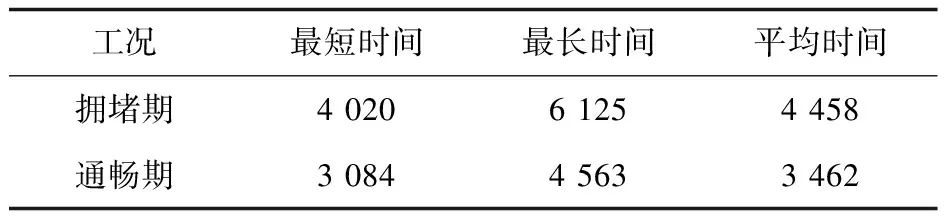
表1 运行时长汇总 s
从表1可知,拥堵期的运行时长比通畅期增加近1 000 s。道路交通拥堵时,驾驶员被迫依据交通情况频繁操作车辆,其驾驶行为不能充分反映驾驶员的内在驾驶习惯。基于该公交运行线路特点以及运行时长特征,应选取通畅期时段且运行片段里程长数据作为样本数据,样本数据挑选原则见表2。

表2 数据样本筛选准则
2 驾驶特性辨识
2.1 辨识窗口和周期
辨识窗口K和辨识周期P的取值对于最终辨识精度有直接影响。从前文分析可知,公交车单圈运行时长差别较大,但距离基本保持不变。因此,距离比时间更合适作为辨识窗口K的基本单位。进出站过程是公交车最典型的运行片段,包含了驾驶员的典型驾驶操作过程。因此,辨识窗口至少应包含进出站过程,其数值大小则应依据运行线路中的运行间距来进行调整。同理,辨识周期P同样采用里程作为单位,表示驾驶员辨识算法的运行周期,决定了进入到辨识算法的新鲜数据量。可依据研究对象的站点间距分别情况选择辨识窗口K和辨识周期P的初值[6-7],然后根据公交车行驶位置信息优化参数数值(见表3)。
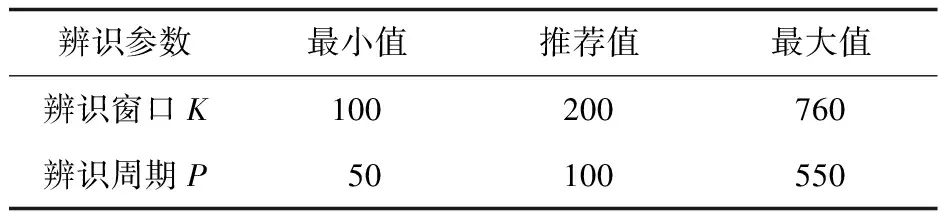
表3 辨识参数数据选择 m
2.2 辨识模型
高斯混合模型(gassian mixture model,GMM)是一种基于概率密度分布的模型辨识方法。图1所示为基于GMM进行驾驶员驾驶特性辨识的基本流程。待辨识对象是目标样车的5位驾驶员。可从与驾驶员驾驶特性密切相关的参数原始信号中获得驾驶员驾驶行为信号,并经过特征信息提取后,进入到辨识阶段。GMM子模型给出的是当前输入信号属于某一类型的概率。可通过设计判别准则来调整辨识精度。

图1 GMM辨识流程
本文设计的判别准则见式(1),当辨识结果对应某驾驶员的概率高于70%时就接受,低于40%则拒绝,否则采用概率最大的两种类型按照比例权重混合接受,以保证辨识结果的连续性。

(1)
式中α为GMM子模型辨识输出的匹配概率。
2.3 基于时域特征参数的辨识
在混合动力公交车行驶过程中,驾驶员主要通过操作加速/制动踏板(目标车辆无换挡配置)实施车辆控制。因此,能耗相关的驾驶特征蕴含在车辆行驶过程中,可从中提取特征参数作为辨识算法的输入信息(制动踏板信号处理为负的加速踏板信号),共17个时域参数,部分参数见表4。

表4 辨识模型时域输入参数
将研究对象16.7 km线路运行区间分为100个训练样本和60个测试样本,对5位驾驶员进行辨识(结果见表5)。从表5可以看出,GMM对5位驾驶员的接受准确率平均到达90%,拒绝准确率高于93%,较好地实现了驾驶员驾驶特性辨识。
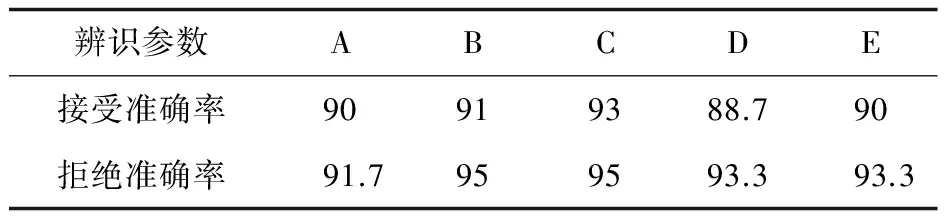
表5 17个时域特征参数辨识结果 %
2.4 基于频域特征参数的辨识
在所选的数据样本中(道路情况良好),驾驶员的内在驾驶习惯是其调整踏板的主要原因。图2所示为驾驶员A和E各自2次出站过程中踏板时域与倒频谱信号。两位驾驶员的踏板时域信号均波动较大,一致性较差,而相应的倒频谱信号收敛一致性较好。驾驶员E的倒频谱信号整体波动较小,信号在第9 s时变为负值;驾驶员A的倒频谱信号则是迅速衰减。由此可见,在道路情况良好的前提下,即使是同一个驾驶员的出站操作,相对于变化差异较大的踏板时域信号,其倒频谱信号波动差异较小。辨识模型输入参数数据范围变化太大,会导致模型训练过程较长,且辨识精度和泛化能力下降。因此,应从驾驶员操作特征参数的倒频谱信号中进一步提取辨识参数。
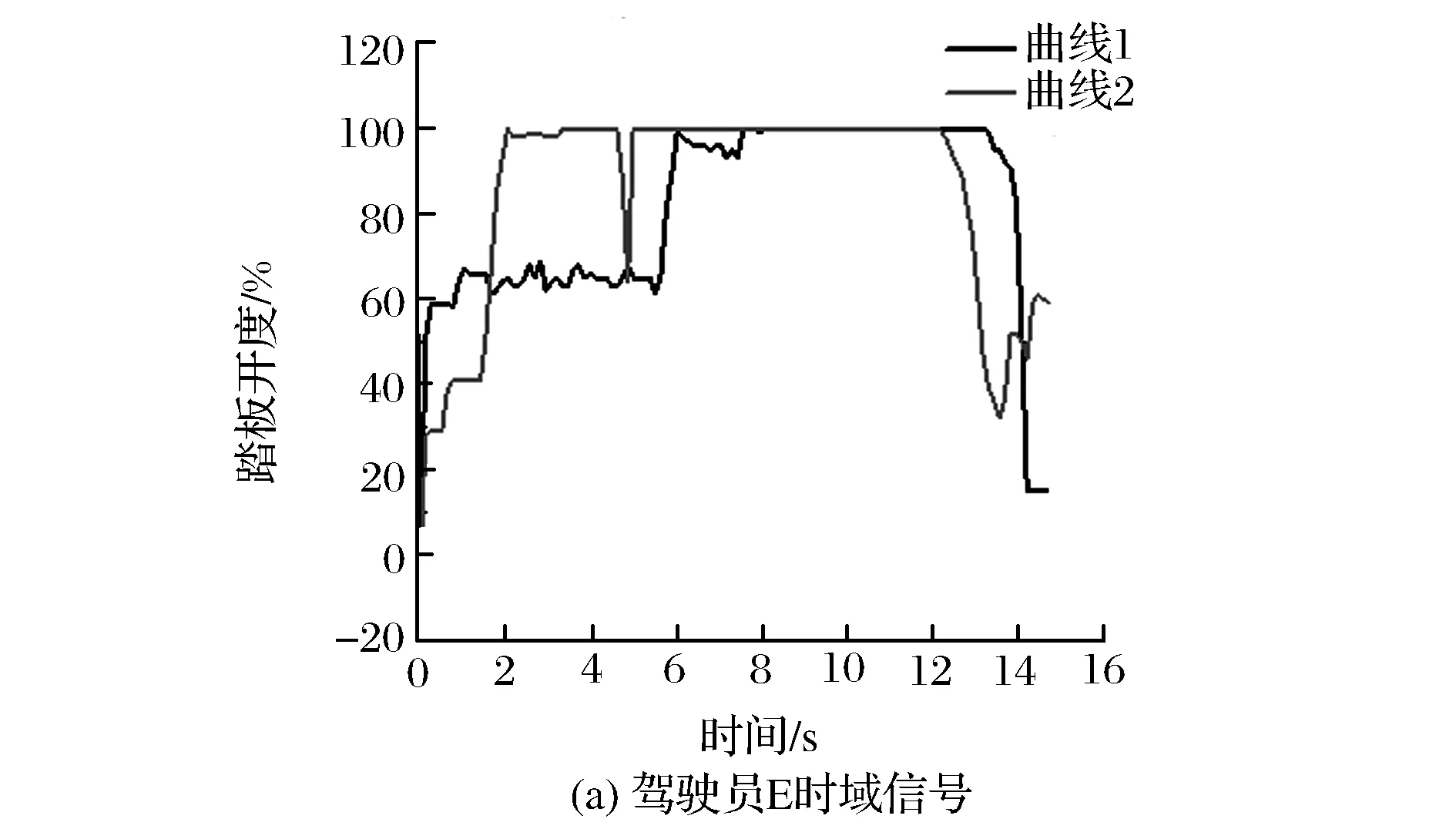


图3 出站过程踏板时域及倒频谱信号
从踏板倒频谱信号选取的特征变量见表6。定义参数截止时刻F表示当前积分面积占总面积90%的采样时间值。

表6 倒频谱信号特征量
增加表6中的倒频谱参数到辨识模型中,重新训练GMM辨识模型,结果见表7。
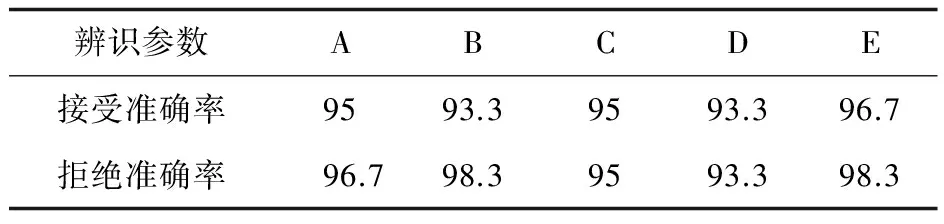
表7 倒频谱辨识精度 %
从表7可以看出,增加了倒频谱信号的模型辨识精度得到了提升,尤其是平均拒绝准确率高于95%,辨识精度可以满足后续控制策略设计的需求。
3 结 语
驾驶员驾驶行为对混合动力公交车实际运行能耗有重要影响。本文针对固定线路下混合动力公交车驾驶员驾驶特性辨识算法展开研究。研究表明,在公交车运行工况中,踏板以及车辆速度等特征变量的统计分布状况反映了驾驶员内在的驾驶特性。同一驾驶员的踏板开度倒频谱信号比时域信号收敛性更好,有利于降低辨识模型的运算量。基于特征变量的时频域信号构建了GMM驾驶员特性辨识模型,并结合道路运行工况特征优化模型参数,最终实现了93%的辨识精度。
[1] BINGHAM C. Power energy storage technologies and energy management[C]//the 5th Advanced Engine Control Symposium, 2015: 131-138.
[2] CHENG C, MCGORDON A. A model to investigate the effects of driver behaviour on hybrid vehicle control[G]//The 26th International Battery, Hybrid and Fuel Cell Electric Vehicle Symposium & Exposition.2014:421-427.
[3] MATTHEW G, BENJAMIN M. Factors affecting the fuel consumption of plug-in hybrid electric vehicles[G]//The 25th International Battery, Hybrid and Fuel Cell Electric Vehicle Symposium & Exposition,2010:567-572.
[4] CHIYOMI Miyajima. Driver modeling based on driving behavior and its evaluation in driver identification[J].Proceedings of the IEEE, 2015,95(2):427-437.
[5] XU Guoqing, LIU Li, SONG Zhangjun, et al. Driver behavior analysis based on Bayesian network and multiple classifiers[J]. Intelligent Computing and Intelligent Systems, 2010:663-668.
[6] 严英.纯电动公交客车加速踏板驾驶特性辅助优化策略研究[D].天津:天津大学,2012.
[7] 朱道伟.基于道路工况远程自学习的混合动力城市客车控制策略的动态优化[J].机械工程学报,2010,46(6):33-37.
(编辑:张峰)
Identification Algorithm of Driving Behavior for Hybrid Bus Driver
YAN Ying1, ZHU Daowei2, YE Peng3, YANG Gang2
(1.Tianjin University of Technology and Education, Tianjin 300222, China;2.Military Vehicle Department, Military Transportation University, Tianjin 300161, China;3.Scientific Research Department, Military Transportation University, Tianjin 300161, China)
Considering the mismatch between driving behavior of hybrid bus driver and standard control parameter reduces driving range, the paper studies the description method of driving behavior characteristic parameter and identification algorithm of driving behavior in the same road condition. It establishes an identification model of driving behavior based on GMM (Gaussian mixture model) by extracting characteristic variable related to energy consumption in time domain. The result shows that the cepstrum signal of pedal can reflect drivers’ driving tendency rather than time domain signal, and the precision of the model can reach 93% by optimizing the model parameter according to the running characteristics based on time-frequency domain signal of characteristic variable.
hybrid bus; driving behavior; GMM (gaussian mixture model); driver identification
2016-10-13;
2016-11-17.
国家自然科学基金资助项目(51307119);天津市局级预研项目(KRKC011503).
严 英(1984—),男,博士,讲师.
10.16807/j.cnki.12-1372/e.2017.02.011
U469.72
A
1674-2192(2017)02- 0044- 04
猜你喜欢
电声技术(2022年7期)2022-09-23
哈尔滨工程大学学报(2021年10期)2021-11-05
空间科学学报(2021年6期)2021-03-09
黄河之声(2019年23期)2019-12-17
汽车实用技术(2019年17期)2019-09-21
军事运筹与系统工程(2019年4期)2019-09-11
宇航计测技术(2019年1期)2019-03-25
通信产业报(2018年40期)2018-01-22
移动通信(2017年3期)2017-03-13
教育界·下旬(2016年4期)2016-11-19
