多目标舰船自动跟踪方法研究*
2017-02-15 05:06张树怀田联房陈泽创
中国海洋大学学报(自然科学版) 2017年2期
张树怀,董 超,李 彬,田联房,陈泽创
(1.华南理工大学自动化科学与工程学院,广东 广州510640; 2.国家海洋局南海调查技术中心,广东 广州 510640)
多目标舰船自动跟踪方法研究*
张树怀1,董 超2**,李 彬1,田联房1,陈泽创1
(1.华南理工大学自动化科学与工程学院,广东 广州510640; 2.国家海洋局南海调查技术中心,广东 广州 510640)
目前针对背景复杂的海上舰船作为跟踪对象的跟踪算法研究较少。另外,多目标跟踪算法在变化频繁的背景条件下的精确性和实时性不足。为了提高多目标舰船跟踪的视觉跟踪算法的实时性和鲁棒性,本文提出了一种改进的基于TLD(Tracking-Learning-Detection)多目标舰船自动跟踪算法。该算法实现了海上多个目标舰船准确实时跟踪。首先,算法应用海天线检测与提取方法,利用最大类间方差阈值分割和Hough变换提取海天线;其次,算法利用Kalman滤波原理对海天线上的目标舰船进行定位与检测,分离出目标舰船;最后通过提取出来的目标用其最小外接矩形生成目标初始跟踪框,跟踪器利用初始跟踪框的位置坐标信息对目标进行实时自动跟踪。算法运行过程中都在海天线附近进行扫描检测,缩小了图像遍历范围,提高了算法的实时性。实验表明,通过对比典型的Mean-shift算法以及原始TLD目标跟踪算法,本文算法跟踪结果的精度较高,实时性较好。
海天线提取; 多目标跟踪; Tracking-Learning-Detection
基于摄像头海上目标舰船的自动跟踪是舰船识别的关键步骤,同时为船员判断可疑舰船提供位置、航向等相关信息。
目前,国内外大多数目标跟踪算法都是以人或者车辆作为跟踪目标,其算法选择背景相对简单,噪声干扰较少,跟踪目标通常比较单一。相比之下,海上舰船跟踪算法应用场景十分复杂。传统的跟踪算法无法满足实时跟踪目标的需求。并且,在海上跟踪领域,国内外大都以雷达设备作为研究对象来跟踪相应舰船,很少有专门针对海上多目标舰船的视频跟踪算法,因此,基于视频的海上多目标舰船跟踪是机器视觉领域研究的难点。
目标跟踪算法当前主要有基于特征的跟踪算法[1],如Mean-shift[2]和Cam-shift[3],基于区域的跟踪算法[4],基于轮廓的跟踪算法[5],基于模型的跟踪算法[6],基于检测器的跟踪算法[7]。基于特征跟踪方法、基于区域的跟踪算法、基于轮廓的跟踪算法、基于模型的跟踪算法皆因其抗干扰性差、运动目标形态发生变化跟踪失败、只适用单目标跟踪、建模困难等问题而不被广泛应用[8]。而基于检测器的跟踪算法是一种自适应的、可靠的跟踪技术,其解决了目标运动形态变化或者特征发生变化时跟踪失败的问题,同时可以对多个目标进行跟踪[9]。当前比较流行的基于检测器的目标跟踪算法,其中最具代表性的是TLD目标跟踪算法[10],该算法是在2010年由英国萨里大学博士生Zdenek Kalal提出的一种算法,该算法使用第一帧中人工标记的样本作为训练检测器的训练样本,将目标区域信息作为正样本,将其周围信息作为负样本,利用在线学习对检测器进行更新。但其算法跟踪的一个前提是必须在第一帧的时候进行人工手动标记,无法实现目标的自动检测与初始跟踪框的自动生成,无法满足现实自动跟踪目标的要求;同时存在原始的TLD算法处理过程复杂,运算量巨大,算法的实时性差,准确率较低,无法适应在海上复杂环境下的跟踪等问题。
针对国内外对海上多目标舰船跟踪算法的空缺以及原始TLD算法运算复杂,准确率较低和快速性差无法实时进行海上目标跟踪以及初始跟踪框无法自动生成等问题,本文在TLD算法的基础上提出海天线检测与提取,缩小了算法中对视频图像遍历的范围,提高了快速性与实时性,同时也对原始算法中手工选取跟踪目标进行改进,利用Kalman滤波思想对阈值进行设定及海天线位置,提取目标舰船位置,从而自动生成初始跟踪框对目标进行自动跟踪,具有较好的适应性,实时性和准确性,适合在复杂海上背景下对多个目标舰船进行实时自动跟踪。
1 算法概述
基于TLD的多目标舰船自动跟踪算法框架分为三个主要部分:(1)使用最大类间方差阈值分割法以及相应的Hough变换[11]检测与提取海天线;(2)在海天线位置附近利用Kalman滤波器进行目标检测,再根据提取出来的目标利用其最小外接矩形生成初始跟踪框;(3)在之后的跟踪过程中,通过对每一帧图像用跟踪器模块和检测器模块共同进行分析处理。跟踪器模块根据上一帧中目标的位置和大小情况来预测当前帧中目标所在的位置。检测器模块对当前帧窗口系统的扫描,检测出一个或者多个可能的目标区域。检测结果和跟踪结果输入到融合处理模块,该模块可以判断出当前视频帧是否存在需要跟踪的目标、目标位置以及当前帧的跟踪轨迹是否有效等信息。这些融合处理结果跟踪结果都一同送到学习模块,学习模块根据输入的结果校正和更新跟踪器和检测器。算法框图如图1所示。
2 基于OTSU法和Hough变换提取海天线
在海上复杂背景环境下,要想对多个目标舰船进行跟踪,往往会受到各种海面波浪等噪声影响,在远海航行中,出现在视野中的大多数的海上舰船目标都位于海天线附近。针对海上环境的特点,利用最大类间方差法(OTSU法)[12]和相应的Hough变换提取出海天线,根据海天线的位置可以缩小本文算法对图像的遍历范围,提高算法的快速性。
最大类间方差法算法的数学描述如式(1)-(7)。
ω0=N0/(M×N),
(1)
式中:ω0为前景的像素点数占整幅图像的比例;N0为图像中像素的灰度值小于阈值的像素个数;M为图像像素的长;N为图像像素的宽。
ω1=N1/(M×N),
(2)
式中:ω1为背景像素点数占整幅图像的比例;N1为图像中像素的灰度值小于阈值的像素个数。
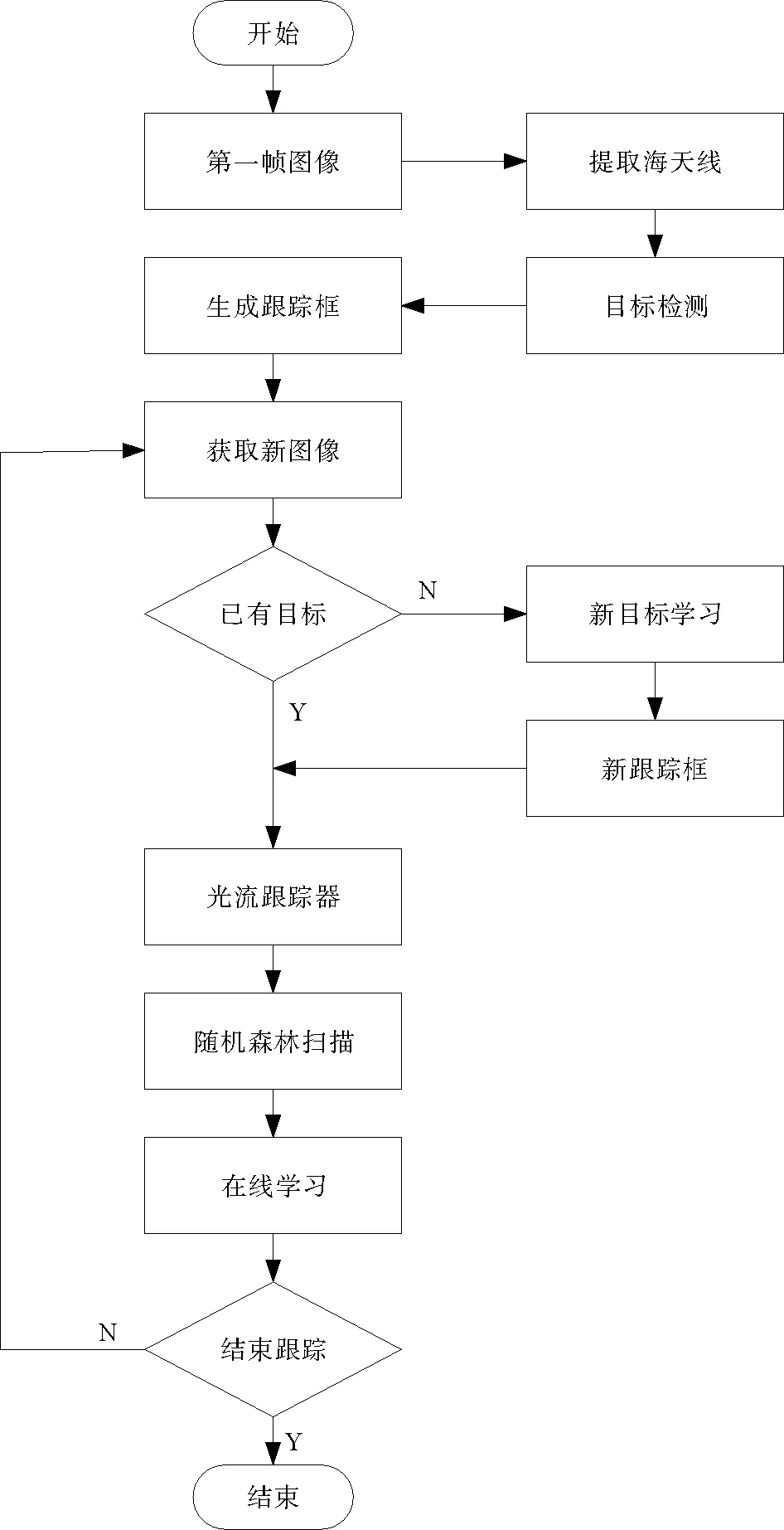
图1 算法整体框图Fig 1 The flowchart of the algorithm
(3)
ω0+ω1=1,
(4)
μ=ω0×μ0+ω1×μ1,
(5)
式中:μ为图像的总平均灰度;μ0为前景的像素平均灰度;μ1为背景的像素平均灰度。
g=ω0×(μ0-μ)2+ω1×(μ1-μ)2,
(6)
式中g为图像的类间方差。
将式(5)代入式(6),得到等价公式如式(7)所示。
g=ω0×ω1×(μ1-μ)2,
(7)
采用遍历的方法得到使类间方差最大的阈值T,即为所求。在得到图像的最大的阈值后,通过Hough变换得到海天线。
Hough变换鲁棒性高,而且算法执行消耗时间少,能满足实时性的要求。其计算公式如式(8)所示,其中式(8)为直线的极坐标方程。
ρ=xcosθ+ysinθ,
(8)
式中:ρ为直线上与过原点的垂线交点(x,y)到原点的距离;θ为过原点的垂线与x轴正方向的夹角;x为交点横坐标;y为交点纵坐标。
如图2所示,图像空间中一条直线,参数空间就变为(ρ-θ)空间,(x-y)空间中的任意一条直线对应了空间(ρ-θ)内的一个点,由式(8)可知,(x-y)空间内的一点对应了(ρ-θ)空间中的一条正弦曲线。如果有一组位于由参数ρ和θ决定的直线上的点,则每个点对应了参数空间中的一条正弦曲线,所有这些曲线必交于点(ρ,θ)。
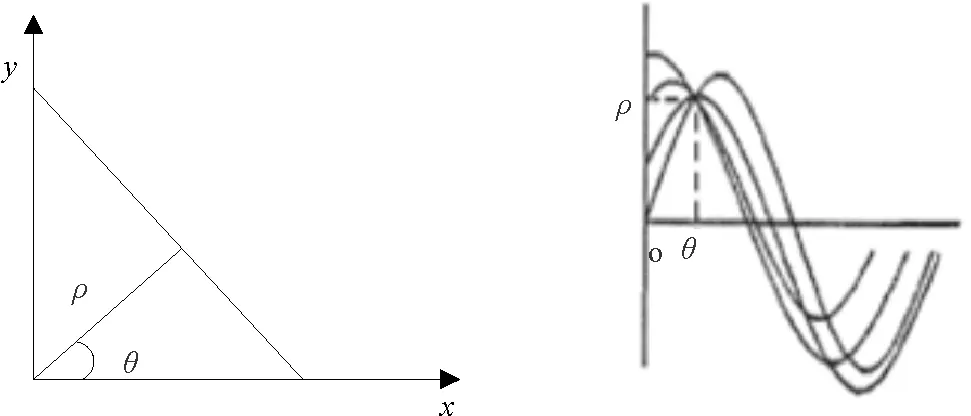
图2 对偶示意图
同样,在计算的过程中需要对参数空间进行离散化,其数学描述如式(9)所示。
(9)
式中:θn为每个单元的中心点坐标的角坐标值,ρn为每个单元的中心点坐标的极半径值,n为分割段数,Δθ为将π平均分割Nθ所占的角度值,Δρ为将π平均分割Nρ所占的半径值。
(10)
式中L是为图像中的点(x,y)距原点的距离最大值。
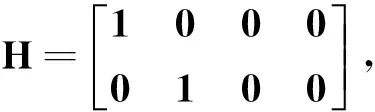
经过最大类间方差法求出阈值为0.070 6,通过阈值设定,再经过Hough变换后,提取出了对应的海天线,如图3b中绿色标记。
3 基于Kalman滤波器的检测模块设计
Kalman滤波器[13]具有无偏、稳定、等特点,在即使并不知道模型的确切性质,也可以根据信号的过去修正信号的当前状态,甚至可以对将来状态进行估计。在目标检测过程中,常常由于目标运动状态改变而影响检测效果,所以需要对目标进行预测以便实现准确的跟踪。本文提出基于Kalman滤波器的检测模块是与目标检测算法[14]紧密结合的。TLD检测模块是基于扫描窗口策略,在第一帧图像上,根据初始目标的区域和大小信息,以子窗口的形式给出所有可能的具有不同位置及大小的目标边界框(子窗口),在接下来的每一帧图像中,以窗口扫描的形式通过一个级联分类器对每个子窗口内的图像内容进行判断,决定是否为目标。
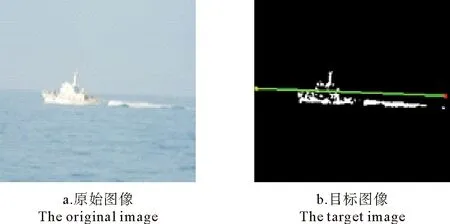
图3 海天线提取图Fig.3 The diagram ofsea antenna
本文在检测模块做了一些改进,使得TLD算法能够在一开始就能检测出目标,并对其进行有效的自动跟踪。算法思路是通过上面得到的海天线位置以及利用Kalman滤波器将目标初始状态赋予滤波器预测目标运动状态,然后将得到的状态信息赋予检测器进行检测,寻找最佳匹配,获得目标具体信息,提取出舰船目标。其数学描述如式(11)、(12)所示,其中式(11)为状态方程,式(12)为观测方程。
xk=Axk-1+wk-1,
(11)
式中:xk为k时刻的系统状态矢量;A为系统状态转移矩阵;xk-1为k-1时刻的系统状态矢量;wk-1为相互独立的均值为零高斯白噪声,表示状态转移噪声,概率分布可以表示成p(w)~N(0,Q)。
zk=Hxk+vk,
(12)
式中:zk为k时刻的系统观测矢量;H为观测矩阵;vk为相互独立的均值为零高斯白噪声,表示观测噪声,概率分布可以表示成p(v)~N(0,R)。矩阵Q和R分别为状态转移噪声和观测噪声的协方差矩阵,实践中我们将其分别设为:Q=10-5I4,R=10-1I2,其中I4为4×4的单位矩阵,I2为2×2的单位矩阵。
选取每帧图像中目标中心的位置信息来构建Kalman滤波器中k时刻的状态变量和观测值,其数学描述如如式(13)、(14)所示,其中式(13)为系统状态向量,式(14)为系统观测向量。
xk=[pxpyvxvy]T,
(13)
式中:px和py分别表示为中心在水平方向和竖直方向上的坐标分量信息;vx和vy分别代表的是目标在水平方向和竖直方向上的速度信息。
zk=[zxzy]T,
(14)
式中,zx和zy分别代表的是在当前帧中观测到的目标中心在水平方向和竖直方向上的坐标信息。
在实际图像序列中,相邻两帧间的时间间隔非常短,则认为目标在相邻两帧间做匀速运动,系统为线性模型。其数学描述如式(15)、(16)所示,其中式(15)为状态转移阵,式(16)为系统观测矩阵。
(15)
(16)
其中t代表的是相邻两个视频帧之间的时间间隔。
通过Kalman滤波器在海天线附近进行舰船目标检测,可以准确获得定位目标的位置和大小信息,如图4b所示。
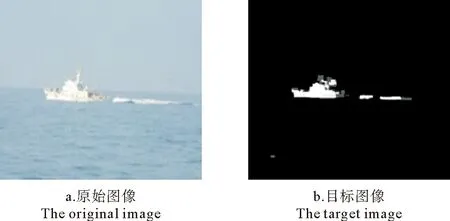
图4 初始目标的确定Fig.4 The initial target
在提取目标舰船后,利用目标的最小外接矩形框生成初始的目标跟踪框,如图5所示。

图5 目标初始跟踪框
4 跟踪模块和融合处理模块的改进
本文针对了原始TLD算法存在的算法复杂,运算时间较长,对其进行了改进,将跟踪器和信息融合处理器的遍历范围从原来的整一幅图像到在海天线附近的遍历,缩小了范围,提高了算法的快速性。其运行流程如下:
(1)光流跟踪器[15]根据目标在上一帧中的位置和大小信息,由自适应跟踪器计算出目标在当前帧中所在的区域以及大小,以及设定遍历范围。
(2)用随机森林分类器[16]和检测器对当前帧中海天线位置附近进行扫描,找出当前帧中存在目标的一个或多个可能的区域。
(3)在线模板对当前帧进行判断,如果有效,则进入学习模块,通过在线学习[17-18]完成检测器的在线更新,然后回到步骤(1),开始对下一帧进行处理。
5 实验结果及分析
为了验证本文提出的TLD多目标舰船自动跟踪方法,这里采用了两组视频序列进行实验,并比较了三种不同方法的实验结果,即传统的Mean-shift方法,原始TLD方法和改进后的自动跟踪方法并对三种方法的跟踪结果进行比较。所用算法实验的环境都是在MATLABR2016b+VS2010+openCV2.4.8,CPUIntelcorei5,内存4G,Window7,所用的视频数据均来自南海拍摄的舰船视频,在预处理中将视频调节成320×240。
5.1 跟踪效果评价指标
目前目标跟踪方法的评价指标主要根据跟踪结果与目标实际位置进行差异比较。本文采用跟踪结果与基准数据的中心偏移量作为评价跟踪结果好坏的指标,其主要表现为跟踪中心与实际真实中心的偏移程度,其数学描述如式(17)所示。
(17)

对于一个视频来说,可以通过其平均值来评价整个跟踪性能的好坏,其数学描述如式(18)所示。
(18)
式中:Mean表示的是平均中心偏移量;N视频总帧数。
本文还利用了TLD跟踪到的帧数与总帧数的比值来计算TLD跟踪的成功率,其数学描述如式(19)所示。
s=R/N。
(19)
式中:R表示TLD跟踪到的帧数;N表示的是总帧数;s表示成功率。
同时通过对跟踪进行统计,对跟踪帧率进行了比较,检验算法的快速性。
5.2 试验结果及分析
实验选取了具有复杂背景环境的海上视频序列作为测试序列,序列中包含了摄像头摇摇晃晃导致舰船脱离视野后重新回到视野的跟踪情况,从单目标到多目标进行测试,本文算法中实现的是全自动跟踪,而Mean-shift方法和原始TLD算法均采用手动框选跟踪框,而本文算法是自动生成跟踪框,为了保持对比的正确性,使三种方法的初始跟踪框保持尽可能相同。
(1)单目标场景实验。实验内容:本实验采用单目标海上视频,跟踪目标为舰船,选取视频帧数为300帧,视频中,由于海上波浪影响,导致摄像头拍摄的视频中舰船脱离视野后重新回到视野,在图6、7、8中,图a为初始状态,图b为正常姿态的舰船,图c为舰船消失视野中,图d为舰船重新回到视野中。
图6为Mean-shift跟踪结果;图7为原始TLD跟踪结果;图8为本文方法跟踪结果。
图6 Mean-shift跟踪
通过对图6、7、8所示方法的跟踪结果进行进一步分析。由图6可知,Mean-shift对舰船目标跟踪有一定的偏离,当目标偏离开视场时,视频中还是出现跟踪框,这是明显错误的,同时当目标重新回到视场中的时候,跟踪偏离更加明显。
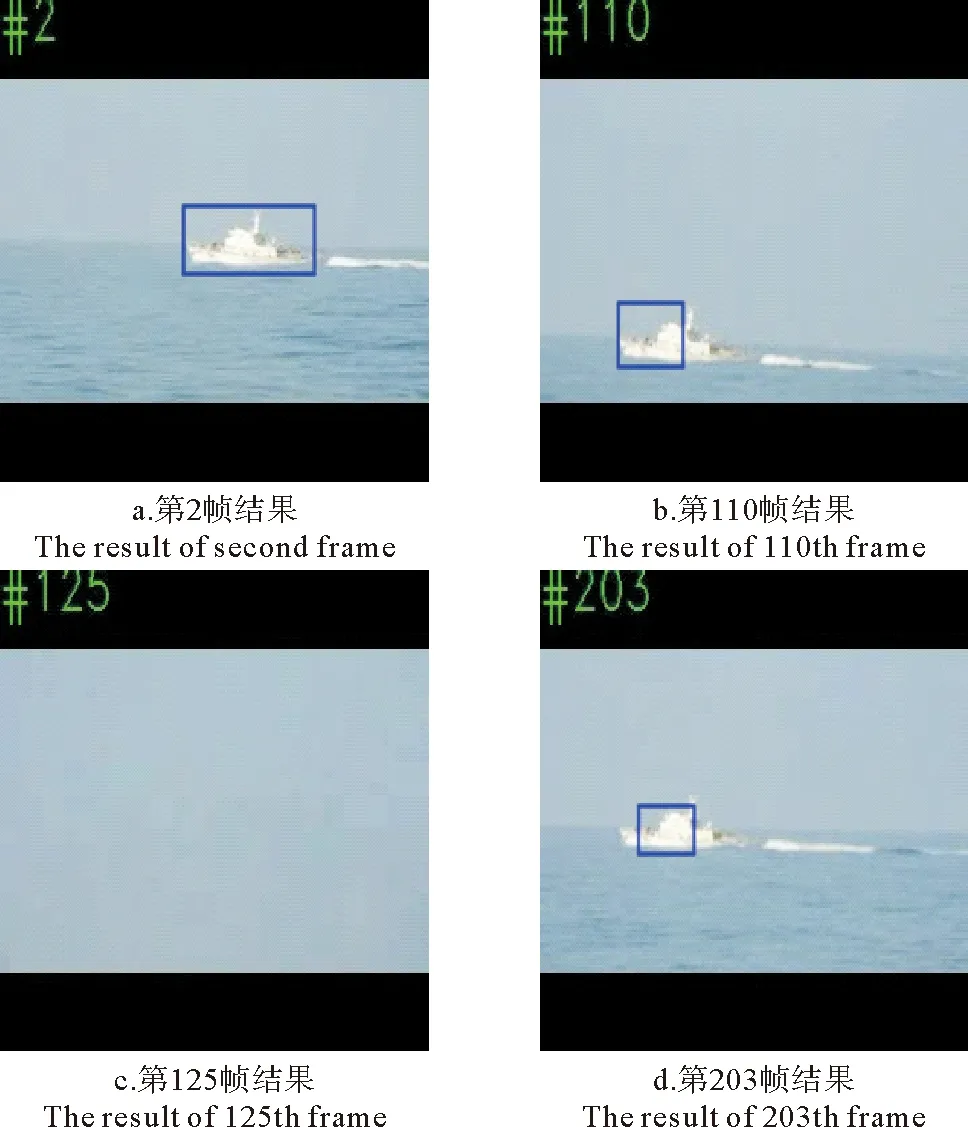
图7 原始TLD跟踪
图8 本文方法跟踪
对图7分析可以知道,当舰船偏离视野又重新回到视野的过程中,跟踪框稍微发生偏移,但总体能跟踪目标,比Mean-shift跟踪效果理想。
对图8进行分析,与Mean-shift算法和原始TLD算法相比,本文方法根据在海天线附近进行扫描,根据Kalman滤波原理进行预测估计舰船目标位置,能准确跟踪舰船,所以该方法的跟踪效果较前面两种方法更为理想。
(2)多目标场景实验。实验内容:本实验采用多目标海上视频,跟踪目标为两艘舰船,选取视频帧数为300帧,视频中,由于摄像头转向影响,导致拍摄的视频中舰船1脱离视野后重新回到视野,在图9~11中,图a为初始状态,图b为舰船1即将偏离出视场,图c为舰船1消失于视野中,图d为舰船1重新回到视野中。
图9为Mean-shift多目标跟踪结果;图10为原始TLD多目标跟踪结果;图11为本文方法多目标跟踪结果。

图9 Mean-shift多目标跟踪
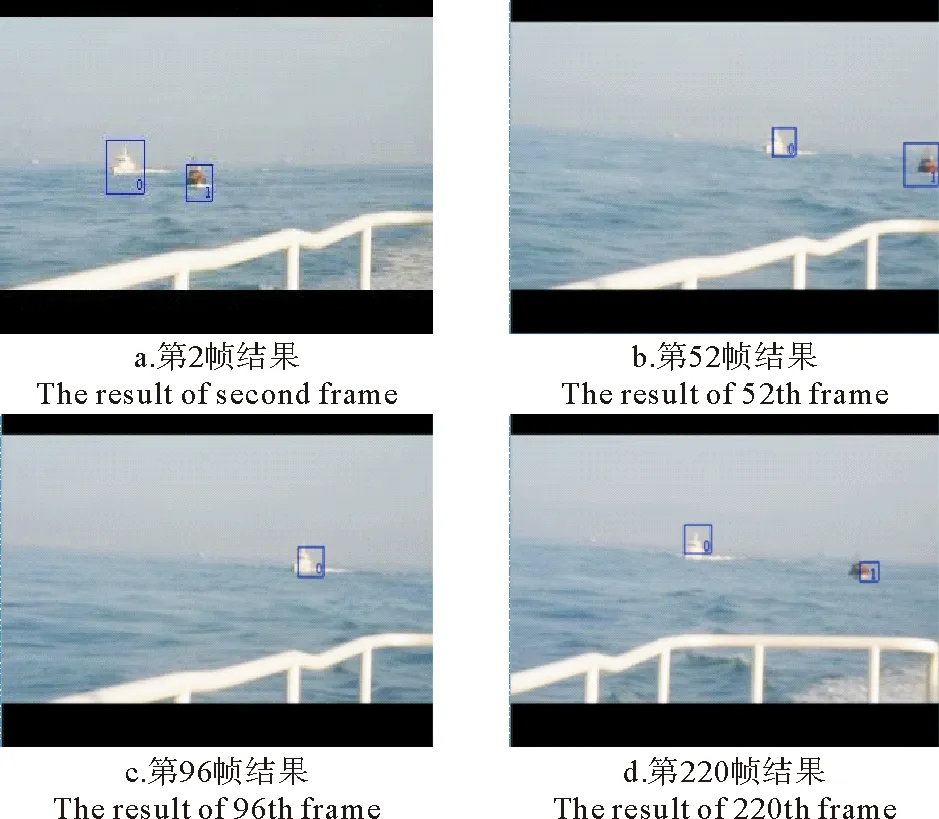
图10 原始TLD跟踪
图11 本文多目标跟踪
对图9~11所示不同方法跟踪结果进行进一步分析。如图9所示Mean-shift算法是根据目标的直方图信息对图像进行遍历查找相应目标,由于舰船0的直方图信息跟桅杆的直方图信息接近,所以导致舰船0跟踪失败,舰船1跟踪框偏离。
如图10所示,原始TLD能够大体上跟踪舰船目标,但是跟踪框稍微发生了偏移,跟踪效果比Mean-shift算法理想。
如图11所示,本文方法采用海天线进行目标扫描,再结合Kalman滤波原理对目标位置进行预测,通过在线学习,对两艘舰船目标进行准确的跟踪,跟踪效果较Mean-shift和原始TLD更为理想。
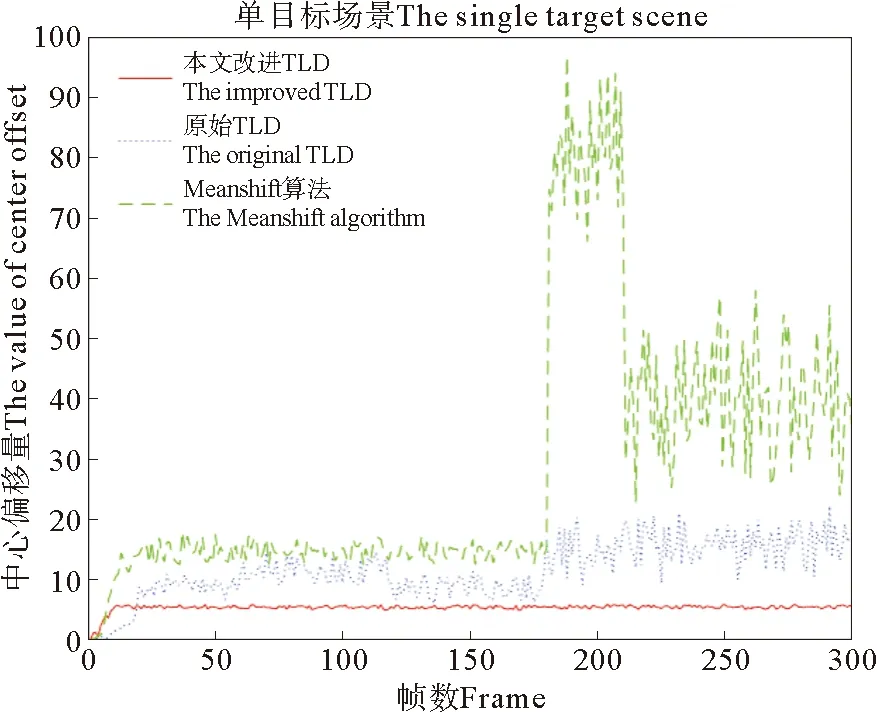
图12 单目标场景中心偏移量
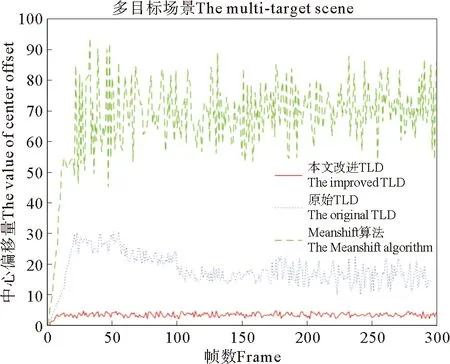
图13 多目标场景中心偏移量
经过两次试验,在不同场景下对不同算法进行比较后,跟踪准确率、跟踪平均中心偏移量以及跟踪效率的结果对比如表1~3所示,跟踪的中心偏移量如图12~13所示,其中平均中心偏移量是通过对300帧视频的中心偏移量取平均得到的结果。
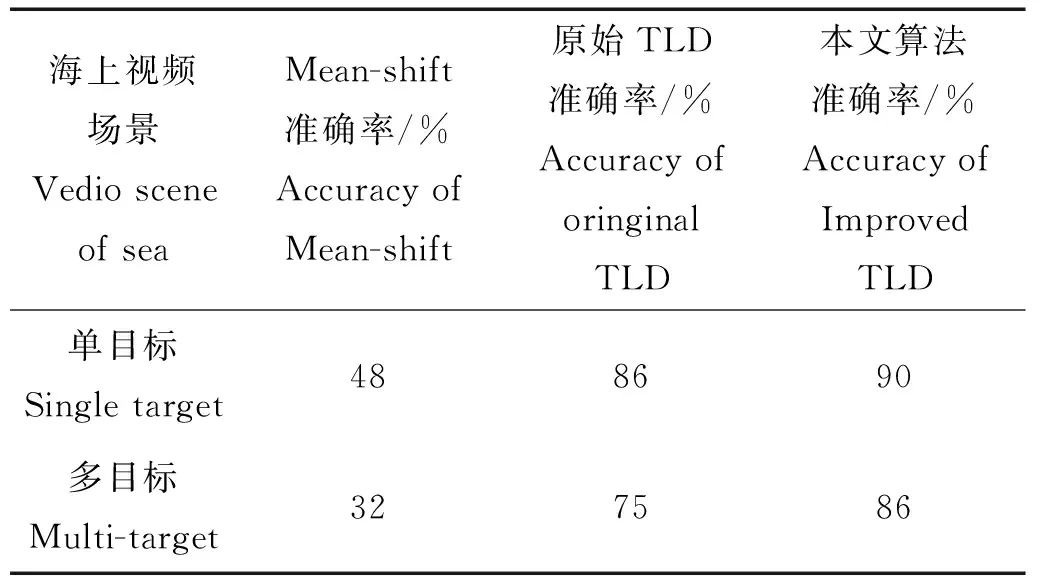
表1 不同场景下跟踪准确率对比

表2 不同场景下平均中心偏移量对比
在算法的准确率精度方面,通过表1可以看出,本文算法准确率比起Mean-shift算法和原始TLD算法来说得到了很大的提高,精度也相应得到提升。如在单目标场景中,Mean-shift算法的准确率最低,只有48%,而原始算法的准确率只有86%,本文经过改进算法后提升为90%。通过表2,对不同算法的平均中心偏移量进行统计比较得到,Mean-shift算法的平均中心偏移量最大,为35.245,说明跟踪效果不是很理想,原始TLD平均中心偏移量为10.179,本文经过算法改进,平均中心偏移量降到5.468,说明跟踪效果理想,算法精度得到提升;在多目标海上场景的情况下,Mean-shift算法准确率最低,为32%,原始TLD算法次之,为75%,本文经过改进算法,使得算法准确率为86%,准确率得到提高,跟踪较为理想。从表2可以看出,Mean-shift算法的平均中心偏移量最大,为73.682,原始TLD算法次之,为21.659,算法跟踪精度比Mean-shift算法高,而本文通过改进原始TLD算法,算法的跟踪精确度大大提升,平均中心偏移量降为3.235,跟踪鲁棒性较高。
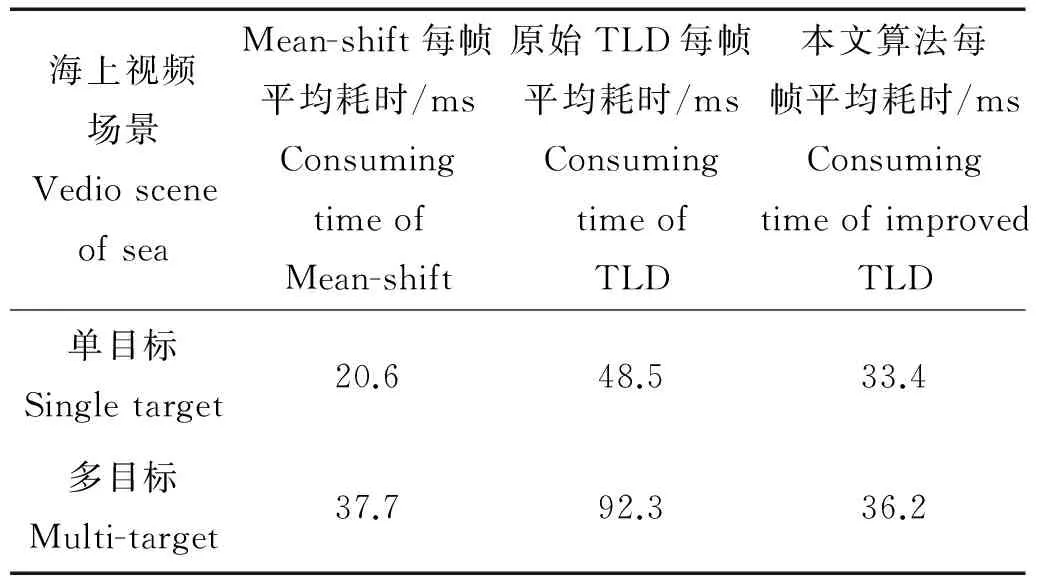
表3 不同场景下跟踪速度对比Table 3 The comparison of trackingspeedin different scenes
在算法的快速性方面,通过表3可以看出,在单目标场景中,Mean-shift算法速度最快,为20.6ms,而原始TLD速度最慢,本文通过改进原始TLD算法,使得算法由原来的每一帧耗时48.5ms降到33.4ms;在多目标场景中,本文算法最快,为36.2ms,Mean-shift算法次之,原始TLD最慢,与原始TLD算法相比,由原来的每一帧耗时92.3ms降到36.2ms,算法的处理时间明显缩短,快速性大幅提高。原因是引入Kalman进行位置预测,相邻两帧之间目标运动幅度不是很大,因此能够做到快速处理及对其进行跟踪,避免了全局空间搜索。
本文在做到自动跟踪的同时保证了算法跟踪的准确性,做到了在复杂海上环境下,能准确检测出目标以及对相应目标进行准确的跟踪,体现了本文算法的高效性和可靠性。
6 结论
针对目标从视野中消失后再次出现于视野中以及复杂可变海上环境下的实时目标跟踪问题,本文提出了一种基于TLD多目标舰船自动跟踪算法。该算法利用最大类间方差法以及Hough变换提取出相应的海天线再利用相应的Kalman滤波思想以及相应的阈值设定确定初始目标跟踪框,通过改进后TLD算法对实验中的海上舰船视频进行测试,利用其帧间信息对模板进行实时更新,快速准确的跟踪对应的海上舰船目标。实验结果表明,基于TLD多目标舰船自动跟踪算法可以有效处理目标从视野中消失后再次出现于视野中的目标跟踪问题以及应对复杂可变的海上环境下镜头上下摇晃造成的目标跟踪困难的问题,体现了算法具有较强的鲁棒性,获得比原始算法更理想的跟踪效果,具有较好的适应性,快速性和准确性,适合在复杂海上背景下对多个目标舰船进行实时自动跟踪。
[1]GZhu,QZeng,CWang.Efficientedge-basedobjecttracking.PatternRecognition[J].PatternRecognition,2006,39(11):2223-2226.
[2]DComaniciu,VRamesh,PMeer.Kernel-basedobjecttracking[J].IEEETransactionsonPatternAnalysisandMachineIntelligence,2003,25(5):564-577.
[3]XueF,JiangZ.Animprovedmeanshiftalgorithmforobjecttracking[C]Hefei:InternationalConferenceonMultimediaTechnology.2011:4833-4836.
[4] 夏瑜,吴小俊,冯振华.基于特征贡献度的meanshift视频跟踪算法[J].控制与决策,2012,27(7):1021-1026.XIAYu,WUXiao-jun,FENGZhen-hua.Meanshiftalgorithmforvisualtrackingbasedonfeaturecontribution[J].ControlandDecision,2012,27(7):1021-1026.
[5]N.Paragios,R.Deriche.Geodesicactivecontoursandlevelsetsforthedetectionandtrackingofmovingobjects[J].IEEETransactionsonPatternAnalysisandMachineIntelligence,2000,22(3):266-280.
[6]WangShu,LuHuchuan,YangFan,etal.Superpixeltracking[C].Dalian:IEEEInternationalConferenceonComputerVision,2011:1323-1330.
[7]BabenkoB,YangMH,BelongieS.Visualtrackingwithonlinemultipleinstancelearning[C].SanDiego:InProceedingsofComputerVisonandPatternRecognition,2009:983-990.
[8] 邵文坤,黄爱民,韦庆.目标跟踪方法综述[J].影像技术,2006(1):17-20.SHAOWen-kun,HUANGAi-min,WEIQing.ResearchonObjectTracking[J].ImageTechnology,2006(1):17-20.
[9]LuoX,LiS,GuanX.Flockingalgorithmwithmulti-targettrackingformulti-agentsystems[J].PatternRecognitionLetters,2010,31(9):800-805.
[10]ZKalal,KMikolajczyk,JMatas.Tracking-Learning-Detection[J].IEEETransactionsonPatternAnalysis&MachineIntelligence,2012,34(7):1409-1422.
[11] 左磊,李明,张晓伟,罗小云.基于改进Hough变换的海面微弱目标检测[J].电子与信息学报,2012(4):923-928.ZuoLei,LiMing,ZhangXiao-wei,LuoXiao-yun.Small-targetdetectioninseaclutterbasedonimprovedhoughtransform[J].JournalofElectronics&InformationTechnology,2012(4):923-928.
[12]HuangD,WangC.Optimalmulti-levelthresholdingusingatwo-stageostuoptimizationapproach[J].PatternRecognitionLetters,2009,30(3):275-284.
[13]HsiehCS.Ontheoptimalityoftwo-stageKalmanfilteringforsystemwithunknowninputs[J].AsianJournalofControl,2010,12(4):510-523.
[14] 熊玮佳.视频序列中运动目标检测与跟踪算法研究[D].武汉:武汉理工大学,2012.XiongWei-jia.TheResearchonDetectionandTrackingAlgorithmsofMovingTargetinVideoSequences[D].Wuhan:WuhanUniversityofTechnology,2012.
[15]SBaker,IMatthews.Lucas-Kanade20YearsOn:AUnifyingFarmework[J].InternationalJournalofComputerVision,2004,56(3):221-255.
[16]LidiaAuret,ChrisAldrich.Changepointdetectionintimeseriesdatawithrandomforests[J].ControlEngineeringPractice,2010,18(8):990-1002.
[17]BabenkoB,YangMH,BelongieS.Robustobjecttrackingwithonlinemultipleinstancelearning[J].IEEETransactionsonPatternAnalysisandMachineIntelligence,2011,33(8):1619-1632.
[18]KalalZ,MatasJ,MikolajczykK.Onlinelearningofrobustobjectdetectorsduringunstabletracking[C].Guildford:On-lineLearningforComputerVisionWorkshop,2009:1417-1724.
责任编辑 陈呈超
The Automatic Tracking Method for Multi-Shipstracking Based on TLD
ZHANG Shu-Huai1,DONG Chao2,LI Bin1,TIAN Lian-Fang1,CHEN Ze-Chuang1
(1.School of Automation Science & Engineering,South China University of Technology,Guangzhou 510640,China; 2.South China Sea Marine Survey and Technology Center,SOA,Guangzhou 510640,China)
At thepresent stage,ships in the complex sea conditionsare taken by scholar on as the tracking object in few research.In addition,the accuracy and real-time of the multi-target tracking algorithm under the background of frequent changes are insufficient.To improve the real-time and robustness of the multi-target visual tracking algorithm in tracking ship.An improved automatic tracking algorithm for multi-target ships based on TLD(Tracking-Learning-Detection) is proposed in this paper.The goal of automatically real-time tracking ships at sea have been achieved in the algorithm.Firstly,the detection and extraction method is proposed to split sea-sky-line.By using Otsu threshold segmentation and Hough transform,the sea-sky-line is easily extracted; Secondly,through using the principle of Kalman filter,the target ships near the sea-sky-line has been positioned and detected in the algorithm,and segregate the target ships.Finally,the initial target tracking frame has been generated with its minimum bounding rectangle by the extracted target,the tracker uses the position coordinate information of the initial tracking frame to automatically track the target in real time.During the running of the algorithm,scanning detection is carried out near the sea-sky-line,which reduces the traversing range and improves the real-time performance of the algorithm.Experimental analysis shows,bycomparing with the traditional Mean-shift algorithm andthe previous target tracking algorithm called TLD,the proposed algorithm is more accurate and more efficient in ship tracking.
sea-sky-line extracting; multi-target tracking; Tracking-Learning-Detection
海洋公益性行业科研专项经费(201505002);中央高校基本科研业务费重点项目(2015ZZ028);自主系统与网络控制教育部重点实验室资助
Supported by the Public Science and Technology Research Funds Projects of Ocean (201505002),the Fundamental Research Funds for the Central Universities,SCUT (2015ZZ028),Key Laboratory of Autonomous Systems and Network Control of Ministry of Education (SCUT of China).
2016-09-11;
2016-12-05
张树怀(1992-),男,硕士生,主要从事图像处理与模式识别方面的研究。E-mail:976877995@qq.com
** 通讯作者:E-mail:dongchaoxj888@126.com
TN958.93
A
1672-5174(2017)02-128-09
10.16441/j.cnki.hdxb.20160207
张树怀,董超,李彬,等.多目标舰船自动跟踪方法研究[J].中国海洋大学学报(自然科学版),2017,47(2):128-136.
ZHANG Shu-Huai,DONG Chao,LI Bin,et al.The Automatic Tracking Method for multi-shipstracking based on TLD[J].Periodical of Ocean University of China,2017,47(2):128-136.
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
地理空间信息(2022年3期)2022-04-01
舰船科学技术(2021年12期)2021-03-29
中华民居(2020年3期)2020-07-24
计算机辅助工程(2018年4期)2018-10-09
价值工程(2018年13期)2018-05-03
地震研究(2016年4期)2016-11-25
舰船科学技术(2016年1期)2016-02-27
科学家(2015年2期)2015-04-09
读者(2014年18期)2014-05-14