高频地波雷达航迹一体化探测中的虚假目标剔除方法*
2017-02-15 05:06纪永刚
中国海洋大学学报(自然科学版) 2017年2期
尹 俊,纪永刚,黎 明
(1.中国海洋大学工程学院,山东 青岛 266100; 2.国家海洋局第一研究所,山东 青岛 266061)
高频地波雷达航迹一体化探测中的虚假目标剔除方法*
尹 俊1,2,纪永刚2**,黎 明1
(1.中国海洋大学工程学院,山东 青岛 266100; 2.国家海洋局第一研究所,山东 青岛 266061)
在高频地波雷达目标探测中,利用动态规划法可以实现目标点迹和航迹的一体化探测。但由于噪声的存在以及一体化算法中阈值设置的不合理,会导致探测结果中存在虚假的目标航迹。本文分析了地波雷达目标参数的测量精度,结合目标运动特性,提出了一种虚假目标航迹剔除方法。对于真实目标,在距离-多普勒(Range-Doppler,RD)谱上由距离维和多普勒频移估计的目标位移应接近,不满足限定条件则被判别为虚假目标。实测地波雷达数据的探测结果与同步船只自动识别系统(Automatic Identification System,AIS)数据的对比实验表明,本文提出的方法能有效排除噪声引起的虚假航迹,提高地波雷达系统目标探测的整体性能。
高频地波雷达; 目标航迹一体化探测; 动态规划法; 虚假航迹排除
高频地波雷达(High Frequency Surface Wave Radar,HFSWR)是海上舰船目标大范围连续探测的重要手段。传统的地波雷达目标航迹探测流程是先点迹检测后航迹跟踪,即通过在距离-多普勒(Range-Doppler,RD)谱上进行恒虚警(Constant False Alarm Rate,CFAR)检测和测向得到目标点迹,然后在一段时间内对目标点迹进行跟踪,得到目标航迹信息[1-2]。在目标点迹检测过程中,对于一些尺寸较小或探测距离较远的目标,由于其目标回波强度较弱,信噪比较低,使用CFAR检测时存在目标漏检的情况,引起航迹断裂,甚至出现目标航迹失踪的情况,影响高频地波雷达目标航迹探测的效果。
检测跟踪一体化技术是近些年来雷达信号处理领域的新兴技术,可实现低信噪比目标的检测。检测跟踪一体化技术的思想是直接利用传感器的原始观测信号,对单帧RD谱不进行目标有无的判断,而是将可能来自于同一目标的回波能量按照时间进行积累,提高目标信噪比,航迹决策只在最后环节进行,检测出目标的同时也得到目标的航迹。目前检测跟踪一体化技术的具体实现方法包括动态规划法(Dynamic Programming Algorithm,DPA)[3-7]、粒子滤波算法(Particle Filter,PF)[8]、霍夫变换法(Hough Transform,HT)[9]等。在目标航迹的检测跟踪一体化过程中,剔除噪声引起的虚假航迹是其中一个非常重要的步骤,本文主要讨论的是动态规划法中的虚假航迹排除方法。
动态规划法最初被用来解决多阶段的最优控制问题,后来被应用到信号处理和最优估计问题。1985年,Barniv首次将该方法应用于微弱目标的探测[3-4],目前广泛应用于雷达领域的DPA算法是1996年由澳大利亚的Tonissen和Evans提出的[5]。国内也有学者[6,10-12]将DPA算法应用于高频地波雷达目标探测并得到了目标航迹集合。从目前研究来看,基于DPA算法的地波雷达目标航迹的检测跟踪一体化仅依靠回波强度积累值来判断目标航迹的真伪,噪声引起的部分虚假航迹不能被有效地排除,需发展新的航迹判别和虚假航迹剔除方法。
本文提出了一种适用于地波雷达的虚假目标航迹排除方法,提高动态规划法目标航迹探测的性能,该方法不仅利用了目标回波强度的积累值,而且利用了目标的连续运动特性,不再仅依靠回波强度阈值判断目标航迹的真伪。
1 传统DPA算法及排除虚假航迹的局限性
DPA算法航迹搜索的过程在RD谱上进行,每帧RD谱如图1所示:纵轴为径向距离,横轴为多普勒频移。距离、多普勒频移坐标值可结合地波雷达参数分别转化为径向距离和径向速度。根据其频率分辨率和距离分辨率,将RD谱图分为N×M个单元格,其中M为距离单元格的个数,N为频率单元格的个数。目标在RD谱中的位置可以用坐标(i,j)来表示。

图1 高频地波雷达RD谱

(1)
Ak为目标回波强度幅值,wk(i,j)为k帧RD谱第(i,j)单元的噪声幅度值。
DPA算法实现目标航迹一体化探测流程如下:
(a)航迹初始化:对所有的x1=[i,j]'∈X1
I(x1)=z1(i,j),
(2)
Ψ1(x1)=0,
(3)
I(xk)为k时刻的值函数,Ψk(xk)为I(xk-1)取最大值对应的xk-1,在k=1时设置为0。
(b)迭代:对2≤k≤K,对所有的xk= [i,j]'∈Xk′
(4)
(5)
Xk′为目标可能的转移范围,一般为目标当前位置附近的几个单元格。
(c)航迹终止:满足
(6)
VT为阈值。
(7)

每帧RD谱上同时包含了信噪比较低和较高的目标,进行目标航迹一体化探测时,所有目标都按照(4)式进行了回波强度积累,可以明显提高目标信噪比。但与同一批回波信号中信噪比高的目标相比,信噪比低的目标航迹回波累积强度仍然偏低,利用(6)式对航迹的真伪进行判断时,若阈值设置较高,可能会出现信噪比低的目标航迹虽然被搜索到,但是由于阈值设置较高而被错误舍弃的情况,导致航迹漏检;而如果阈值设置较低,可能出现较多由噪声引起的虚假航迹。
2 基于目标运动特性的虚假航迹排除方法
为解决传统DPA算法在排除虚假航迹时的局限性,本文结合船只运动目标在RD谱的连续运动特性和地波雷达目标参数的测量特性提出虚假航迹排除方法,该方法可只利用RD谱的距离和多普勒频移信息,不需目标方位信息,在DPA算法进行无向航迹搜索阶段即可实现虚假航迹的排除。
2.1 目标连续运动特性分析

(8)

r1-r0=v0(t1-t0),
(9)
在RD谱中的航迹检测是对上式的离散化,因此有:
r(k+1)=r(k)+Tv(k),
(10)
T=t1-t0为相邻两帧RD谱的时间间隔。
需要说明的是,在目标相对于雷达站运动角度φ控制在10°之内能保证有较高精度。对(10)式进一步递推可得:

(11)
由此可知:短时间内船只目标连续运动时,已知目标在RD谱上的初始径向距离和每一帧谱的多普勒频移信息,就可以连续递推得到目标在各帧谱上的径向距离位置。
利用DPA算法完成目标航迹搜索时,可从起始帧和最后帧RD谱的目标径向距离信息直接得到目标径向位移,该位移记做sr;利用RD谱的径向速度与T的乘积得到相邻谱间的目标径向位移,在一段时间内进行积累后可得目标总的径向位移,该位移记做st。对于真实的目标航迹,目标的运动规律符合(11)式,因此sr与st的值相同;而虚假目标航迹是由杂波或噪声引起的,并不符合目标在RD谱的连续运动特性,sr与st间距离估计偏差较大。
2.2 虚假航迹排除方法
本文基于上述目标连续运动特性提出虚假航迹排除方法,其基本思想是:计算目标航迹径向位移sr与st的距离估计偏差,若超过距离估计偏差门限值则被判定为虚假航迹。但为了避免目标长时间运动导致的运动角度φ变化引起的位移误差,将目标航迹的排除过程分为多次短时检验,即每搜索几帧RD谱就进行一次检测。每次短时检验的具体实现如下:
(a)在DPA算法进行步骤b的同时,更新RD谱多普勒频移信息得到的目标径向位移st
(12)
(b)达到一次短时检验时间时,计算RD谱距离信息得到的目标径向位移sr
sr=rf-rs,
(13)
rs为一次短时检验时段内初始目标径向距离;rf为一次短时检验时段内最终目标径向距离。
(c)计算距离估计偏差εr
(14)
地波雷达进行目标探测的距离探测分辨率较低,为千米级[13],经过补偿处理后测距误差为百米级。而速度探测分辨率较高,以雷达工作频率为4.7MHz,相干积累时间291.261s为例,速度探测分辨率为0.394km/h,利用多普勒频移信息按时间进行积累得到位移st,其误差小于百米级,更符合目标的真实径向位移。
(d)更新虚假航迹标识值F
(15)
εT为距离估计偏差门限值,可根据工程需要设定。不同于传统的DPA算法中的阈值设置,误差判别阈值是无量纲的,不受目标回波强度大小的影响。
一条目标航迹经过多次短时检验,若虚假航迹标识值F累计超过限定值则判定为虚假航迹。
将短时检验的方法应用到DPA航迹搜索中,目标航迹搜索流程见图3。
3 实测数据验证
3.1 目标航迹搜索有效性验证
实测数据来自威海某高频地波雷达站。雷达工作频率为4.7 MHz,距离单元分辨率为1.5 km,每帧RD谱数据的相干积累时间是291.261 s,相邻帧的时间间隔是1 min。本文选用了1 h的实测数据。阈值设置与雷达参数选取有关,在本实验的参数设置情况下,对于真实目标,两者的相对误差在15%以内,当 设置为10%,每5 min进行一次短时检验,虚假航迹标识值F设置为5时,与AIS数据的匹配结果较好,同时可以减少计算复杂度。

图3 航迹搜索流程图
在目标航迹探测过程中进行了数据预处理,包括杂波抑制和低门限CFAR预处理。如图4所示,地杂波和一阶海杂波在地波雷达的目标航迹探测中都属于杂波干扰,需进行抑制。
本文采用文献[14]中基于信噪比的方法提取一阶海杂波,并进行抑制。传统的CFAR检测目的是为了得到目标点迹,本文采用了低门限CFAR算法对数据进行预处理,一方面是为了剔除非目标的背景区域信息,减小DPA算法进行航迹搜索时的复杂度,另一方面是为了滤除明显的噪声干扰,避免噪声积累产生伪航迹。

图4 高频地波雷达RD谱中的杂波Fig.4 Clutter in RD spectrum of HFSWR

虚假航迹排除后的RD二维航迹图
(蓝色实线为虚假目标航迹,绿色*为虚假航迹排除后的真实目标航迹。Blue solide line shows the false tracks,green star shows the true tracks.)
图5 目标航迹结果
Fig.5 The track detection results
利用DPA算法进行目标航迹一体化探测并进行虚假航迹排除。本次试验共排除虚假航迹18条,搜索真实航迹61条。图5为利用本文提出的虚假航迹排除方法处理后的航迹距离-速度二维结果,其中绿色航迹为最终真实目标航迹,蓝色航迹被判定为虚假航迹。
从中挑选2个航迹个例,与同步船只自动识别系统(Automatic Identification System,AIS)数据进行对比,论证方法进行目标航迹搜索的可行性,如图6所示。
1号目标航迹跟踪时长为60 min,部分时刻的距离-速度信息如表1所示。
未进行测向的航迹与AIS数据的匹配结果如图6(a)所示;对航迹进行测向后,得到的结果如图6(b)所示,可知该航迹与AIS数据匹配较好,对该条航迹共进行了12次短时检测,结果如表2所示:F累计值为1,可判定为真实航迹。说明该方法可有效探测并判别出真实目标航迹。

(蓝色圆圈为目标在RD谱的位置。Blue circle is the position of targets.)

T/min31428364654地波雷达探测的目标距离①rr/km152.9148.5142.7139.6135.5132.3地波雷达探测的目标速度②vr/km·h-121.824.124.324.324.323.7AIS探测的目标距离③ra/km152.3148.0142.3139.1135.0131.7AIS探测的目标速度④va/km·h-121.923.824.324.224.323.4
①Target range by HFSWR;②Target velocity by HFSWR;③Target range by AIS;④Target velocity by AIS

表2 航迹个例1的短时检验结果
3.2 虚假航迹排除有效性验证
下面给出另外两个例验证虚假航迹排除的有效性:
3号航迹跟踪时长为39 min,部分时刻的距离-速度信息如表3所示:

图7 疑似航迹个例Fig.7 Suspected track results

T/min51220273439rr/km45.644.742.240.839.239vr/km·h-125.125.125.125.125.125.1
获取的AIS数据中没有与之匹配的航迹,对该条航迹共进行了7次短时检测,结果如表4所示:
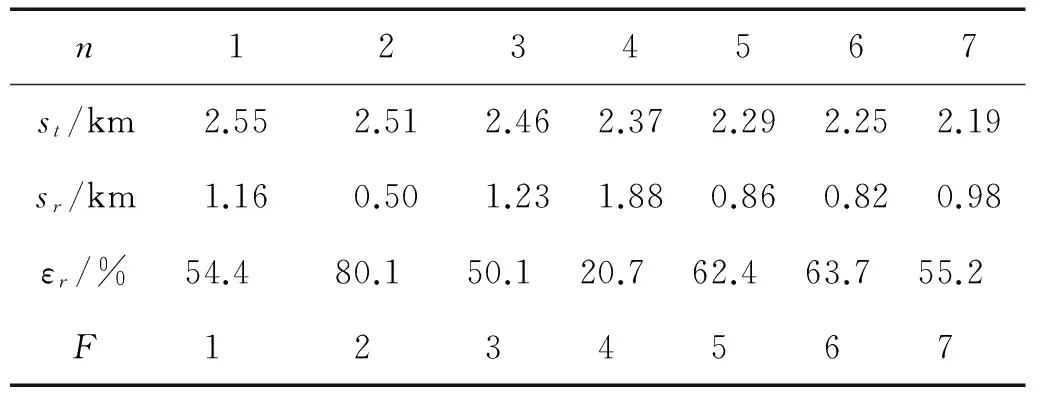
表4 航迹个例3的短时检验结果
注:n为短时检验次数。
Note:nis short-term test number.
F累计值为7,可判定为虚假航迹。如图7所示,该目标在跟踪时长内径向速度较快,但与之对应的径向位移变化却相对较慢,不符合目标连续运动特征。
4号航迹跟踪时长为41 min,部分时刻的距离-速度信息如表5所示:

表5 疑似航迹个例4的距离与速度信息
获取的AIS数据中没有与之匹配的航迹,对该条航迹共进行了8次短时检测,结果如表6所示:

表6 航迹个例4的短时检验结果
注:n为短时检验次数,st、sr单位均为 km。
Note:nis short-term test number.
F累计值为8,可判定为虚假航迹。分析该虚假航迹,结合原始的RD谱,该目标的径向速度较一般船只快,但其径向距离却改变很小,如图8(a)所示;该航迹在3和18 min时的距离-速度如图8(b)所示,可看到该虚假目标在RD谱上的位置固定,不随时间变化,可推断该航迹是由于某固定噪声源引起的虚假航迹。

图8 虚假航迹
4 结语
本文针对传统DPA算法地波雷达航迹检测跟踪一体化结果中的虚假航迹排除困难问题,提出一种虚假航迹排除方法,该方法利用了船只运动目标的连续运动特性,并对传统方法中仅利用回波强度阈值的做法进行了改进,引入了无量纲的距离估计偏差阈值,在此基础上实测数据表明,对由某些系统噪声引起的虚假航迹具有很好的排除效果。
本方法下一步的工作是对方法进行扩展,使之适用于相对于雷达运动角度范围较大的机动目标。
[1] 周文瑜.超视距雷达技术[M].北京:电子工业出版社,2008.Zhou Wenyu.Over-the-Horizon Radar Technology[M].Beijing:Electronic Industry Press,2008.
[2] 何友.雷达目标检测与恒虚警处理[M].北京:清华大学出版社,2011.He You.Radar Target Detection and Constant false Alarm Processing[M].Beijing:Tsinghua University Press,2011.
[3] Barniv Y.Dynamic Programming Solution for Detecting Dim Moving Targets[J].IEEE Transactions on Aerospace & Electronic Systems,1985,21(1):144-156.
[4] Barniv Y,Kella O.Dynamic Programming Solution for Detecting Dim Moving Targets Part II:Analysis[J].IEEE Transactions on Aerospace & Electronic Systems,1987,23(6):776-788.
[5] Tonissen S M,Evans R J.Performance of dynamic programming techniques for track-before-detect[J].IEEE Trans aerosp & Electron.syst,1996,32(4):1440-1451.
[6] 杨帆,黄银和,雷志勇.基于TBD技术的高频雷达舰船目标检测[J].中国电子科学研究院学报,2010,05(6):628-632.Yang Fan,Huang Yinhe,Lei Zhiyong.Ship Target Detection for High-Frequency Radar Based on TBD Technology[J].Journal of China institute of electronics,2010,05(6):628-632.
[7] Grossi E,Lops M,Venturino L.A Novel Dynamic Programming Algorithm for Track-Before-Detect in Radar Systems[J].Signal Processing IEEE Transactions on,2013,61(10):2608-2619.
[8] Wang J,Dai D,Dong H,et al.Improved Evolutionary Particle Filter Algorithm Applied in Radar Tracking[C].Radar,2006.CIE ′06.International Conference on.IEEE,2006:1-4.
[9] 魏兰玲.基于随机霍夫变换的微弱目标检测方法研究[D].电子科技大学,2011.Wei Lanling.Weak Target Detection Method Based on the Randomized Hough Transform[D].University of Electronic Technology,2011.
[10] 夏共仪.基于TBD方法的高频地波雷达弱目标检测与跟踪技术研究[D].哈尔滨:哈尔滨工业大学,2008.Xia Gongyi.Weak Target Detection and Tracking Technology Based on TBD Method of High Frequency Surface Wave Radar[D].Harbin:Harbin Institute of Technology,2008.
[11] 赵波.基于背景统计信息的高频雷达多目标TBD技术研究[D].哈尔滨工业大学,2012.Zhao Bo.Multi-target TBD Technology Based on the Background of Statistical Information of High Frequency Radar[D].Harbin Institute of Technology,2012.
[12] 王超.高频地波雷达目标检测与跟踪一体化探测方法研究[D].青岛:中国海洋大学,2015.Wang Chao.Study on Incorporated Targets Detection and Tracking Method for High Frequency Surface Wave Radar[D].Qingdao:Ocean university of China,2015.
[13] 苏洪涛,张守宏,保铮.空时超分辨方法在高频地波超视距雷达中的应用[J].电子学报,2006,34(3):437-440.Su Hongtao,Zhang Shouhong,Bao Zheng.The application of spatial-temporal super resolution method in HFSWR[J].Chinese Journal of Electronics,2006,34(3):437-440.
[14] 纪永刚,张杰,王彩玲,等.基于信噪比方法的天地波混合体制雷达一阶回波谱提取[J].电子与信息学报,2015(9):2177-2182.Ji Yonggang,Zhang Jie,Wang Cailing,etc.First-order Sea Clutter Spectrum Extraction Based on SNR Method for HF Hybrid Sky-surface Wave Radar[J].Journal of Electronics & Information Technology,2015(9):2177-2182.
责任编辑 陈呈超
False Target Exclusion in Integration of Detection-and-Tracking for HFSWR
YIN Jun1,2,JI Yong-Gang2,LI Ming1
(1.College of Engineering,Ocean University of China,Qingdao 266100 China; 2.The First Institute of Oceanography,State Oceanic Administration,Qingdao 266061,China)
The dynamic programming algorithm can be used in the integration of detection-and-tracking for high frequency surface wave radar (HFSWR).However,the false targets,which are caused by noise or clutter,are difficult to be excludedwhen an inappropriate threshold value was chosen forthe dynamic programming algorithm.In this paper,the parametersaccuracyof HFSWR is alsoconsidered,and a false tracks exclusion methodis proposed based on the continuous characteristics of moving targets.The motion displacements of a real target calculated with the range information should be close to that estimated with theDoppler frequency shift in the(Range-Doppler,RD)spectrum,and the false targetsshould be excluded when the conditions is not satisfied.The comparison of the measured HF radar and synchronousAIS data show that the false targetscaused by the noise wereeliminated effectively,and the performance of real target tracking wasimprovedsignificantly.
high frequency surface wave radar (HFSWR); integration and detection-and-tracking; dynamic programming method; false target exclusion
海洋公益性行业科研专项项目(201505002);国家自然科学基金项目(61671166);中央高校基本科研业务费专项基金项目(2008T04)资助
Supported by Public Science and Technology Research Funds Projects of Ocean(201505002);National Nature Science Foundation of China(61671166);the Fundamental Research Funds for the Central Universities(2008T04)
2016-09-15;
2016-12-11
尹俊(1992-),男,硕士生。E-mail:15610538248@163.com
** 通讯作者:E-mail:jiyonggang@fio.org.cn
TN958.93
A
1672-5174(2017)02-014-08
10.16441/j.cnki.hdxb.20160217
尹俊,纪永刚,黎明.高频地波雷达航迹一体化探测中的虚假目标剔除方法[J].中国海洋大学学报(自然科学版),2017,47(2):14-21.
YIN Jun,JI Yong-Gang,LI Ming.False Target exclusion in integration of detection-and-tracking for HFSWR[J].Periodical of Ocean University of China,2017,47(2):14-21.
猜你喜欢
建材发展导向(2021年19期)2021-12-06
中学生数理化·高一版(2021年3期)2021-06-09
航空发动机(2021年1期)2021-05-22
临床骨科杂志(2020年1期)2020-12-12
青年歌声(2019年12期)2019-12-17
北京航空航天大学学报(2017年7期)2017-11-24
北京航空航天大学学报(2017年2期)2017-11-24
北京航空航天大学学报(2017年4期)2017-11-23
北京航空航天大学学报(2016年6期)2016-11-16
探测与控制学报(2015年4期)2015-12-15