
全自动高空水果采摘机设计
2017-02-02 01:34高天琦侯义龙
大连大学学报 2017年6期
蔡 军,于 聪,高天琦,侯义龙
(1. 大连大学 机械工程学院,辽宁 大连 116622;2. 大连大学 生命科学与技术学院 生命科学工作室,辽宁 大连 116622)
1 工作原理及结构
1.1 工作原理
通过障碍传感让车体能够自己到达目的地并通过单片机记录果园里的路线,再次使用时选择路线即可。采摘装置利用传感技术,分辨出果实和秸秆,剪断秸秆,将果实装入车厢内。在剪刀安装处利用舵机进行剪切动作,通过单片机控制使舵机达到360度灵敏转动。
1.2 结构
全自动高空水果采摘设备的结构如图1所示。
(1)剪切部分:该部分主要通过单片机发出的脉冲信号控制舵机,舵机与剪刀连接在一起,舵机的大扭矩带动锋利的剪刀能够快速剪断果柄,完成采摘果实的动作。
(2)伸缩机构:本设备采用伸缩架的机构进行储物仓及剪切部分的升降,结构简单稳固,该结构适用范围广,制作简单,非常适合此次设备的设计。
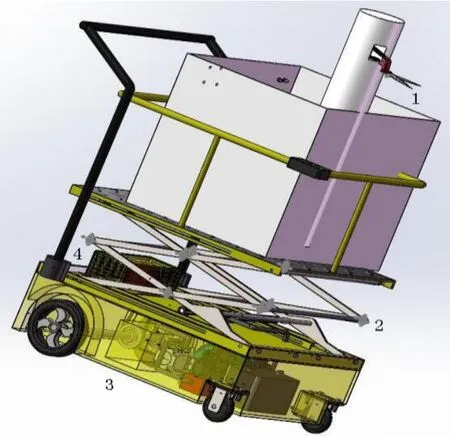
图1 全自动高空水果采摘设备结构图
(3)驱动部分:驱动轮采用麦克纳姆轮,麦轮超强的灵活性和行进性一直是全自动行业的基础,其运动参数可通过编码器与单片机连接,在单片机的控制下完成行进动作,可灵活运动于多种地形,适用范围广。
(4)单片机:该设备采用市面应用较普遍的STM32系列单片机,价格低廉,功能强大,可实现:车轮的行进方向及速度改变、对传感器数据进行采集处理、发送脉冲信号控制舵机转速及转角等功能,能够持续稳定地控制设备的正常工作。
2 关键技术
单片机型号的选用、伸缩结构的确定以及材料的选定、采摘设备的设计是技术的关键。
2.1 单片机型号的选用
意法半导体公司的STM32系列单片机因其强大的库函数调用功能及引脚多的优势[1],结合本项目特点,成为了我们的选择。
2.2 伸缩结构的确定
我们通过对伸缩杆、折叠架两种结构做分析得到,同样作为节省空间的结构来说,伸缩杆对于自身材料的选取有一定限制,而且伸缩动作不够灵活;而折叠架本身比例结构更加合理,更加耐用,对于需要长时间作业的全自动高空水果采摘设备来说,折叠架结构更适合设备的要求。
2.3 水果采摘设备的设计
首先,我们要考虑的就是环境污染问题,为此,我们采用电能驱动,减小污染;其次,设备的空间利用也是一个方面,由于果树种类及高度不同,要求设计的伸缩机构在达到高度要求的同时尽量减少空间的占用[2],于是我们选用了折叠架结构,大大减少所占空间;再次,设备的采摘部分采用舵机控制剪刀的方式,精准便捷。
3 设计试验效果分析
在Solidworks软件里对设备进行建模,并对设备各部分进行力、速度、加速度分析后得出,设备运动情况符合设计要求;在 Anysis软件中对剪切部分进行了应力应变分析,所选用的材料能够较好的完成剪切工作,整体设备刚性优良,结构稳定,适合进行规模生产。
4 总结
(1)从机-环境方面考虑,整个设备机构简单,占用空间小,无污染物排放,降低了劳动强度。
(2)整机零件设计大部分都采用标准件,专用零件占极少数,增强了零件的通用性与灵活性,有利于组织大批量生产而降低生产成本。
[1]孙书鹰, 陈志佳, 寇超. 新一代嵌入式微处理STM32F103开发与应用[J]. 网络新媒体技术, 2010, 31(12): 59-63.
[2]张洁, 李艳文. 果蔬采摘机器人的研究现状、问题及对策[J]. 机械设计, 2010, 27(6): 1-5.
猜你喜欢
环球时报(2022-02-28)2022-02-28
快乐语文(2021年15期)2021-06-15
童话世界(2020年13期)2020-06-15
模具制造(2019年7期)2019-09-25
自动化学报(2019年6期)2019-07-23
故事大王(2019年4期)2019-05-14
小天使·一年级语数英综合(2019年2期)2019-01-10
小天使·一年级语数英综合(2018年11期)2018-11-23
小学阅读指南·低年级版(2018年5期)2018-11-02
电子制作(2018年1期)2018-04-04
