
空袭中预警机阵位选择及航线规划*
2017-01-17 07:28祁炜李侠蔡万勇鲁千红
火力与指挥控制 2016年12期
祁炜,李侠,蔡万勇,鲁千红
(空军预警学院,武汉430019)
空袭中预警机阵位选择及航线规划*
祁炜,李侠,蔡万勇,鲁千红
(空军预警学院,武汉430019)
针对空袭作战时对预警机的需求问题,以空袭作战想定为背景,构建了预警机阵位选择的估算模型;以预警机实时探测能力为基础,给出了预警机航线规划的定量公式,并在其中考虑了工作模式变化对其影响;通过仿真,分析了主要参数与预警机阵位和航线的关系,其结果具有一定的实用价值。
空袭作战,预警机,阵位选择,航线规划
0 引言
在对重点目标进行空袭作战时,使用预警机遂行空中指挥引导任务,可充分发挥其机动灵活和有效提供低空情报保障的特点,从而使空袭战斗机实施超低空突防的成功率得到有效提升[1]。预警机的阵位选择和航线规划直接影响其能否实时、有效地全面覆盖空袭作战所需指挥引导区域,因此,尤为重要。文献[2]基于航母编队对岸实施打击的背景下,分析了预警机探测威力大于或小于敌机攻击路线短轴时的阵位配置问题;文献[3]以航母编队对空防御为背景,从前伸距离和预警扇面角度分析了预警机空域配置方法和巡逻线长度变化情况;文献[4]从舰载预警机探测距离需求出发,引入预警机阵位变量,分析了攻击战斗机和巡航战斗机速度与预警机所需最小探测距离之间的关系;文献[5]从预警机巡逻空域设置的角度,分析了对其航线长度的需求,并给出了预警机兵力使用的估算方法。
本文首先分析了空袭作战时攻防双方的防空导弹拦截线的设置问题,并对预警机的具体作战任务进行了界定;基于确保自身安全且充分发挥固有探测威力的基本原则,同时充分考虑了预警机阵位与攻方战斗机续航能力的关系,提出了一种实用的预警机阵位选择方法;基于实时探测区应有效覆盖责任区和攻方内层防空预警线至预警机情报交界线的中间区域,且直飞航线L最大的基本原则,给出了具体的预警机航线的计算公式,并讨论了机载预警雷达工作模式变化对直飞航线L的影响问题。最后,基于所构建的预警机阵位设置和巡航航线估算模型,对守方战斗机速度、责任区长度、预警机阵位和巡航航线直飞长度之间的关系进行了仿真分析。文中给出的各种定量公式和估算模型均考虑了主要的内外因素,具有实用价值。
1 空袭作战想定
如图1所示,空袭作战时,攻方为了能从任意角度对守方重点目标实施空中打击,其机场位置与守方重点目标之间的距离将小于攻方战斗机的作战半径,战斗机空袭路线最远转弯点的连线构成椭圆形战斗机转弯远界。当守方重点目标附近有机场,且战斗机性能与攻方相仿时,此时攻方机场同样会遭到守方战斗机从任意角度进行的攻击,因此,攻方机场需要构筑环形防空区,其地(舰)空导弹阵位线和导弹拦截线均为圆形。攻方内层防空预警线以里全部区域的防空预警任务主要由其陆基(舰载)平台所搭载的各类传感器承担。

图1 空袭作战攻防想定图
定义1:贯穿攻方机场中心点G与守方重点目标中心点F的直线为进攻轴。垂直于进攻轴且与攻守双方导弹拦截线相切的直线中间区域为综合作战区,它既是攻守双方各自的掩护区域,又是攻方进攻区域的初始部分。
现代化条件下的空袭作战通常分为以下3个阶段。
第1阶段:夺取制空权。为了保障攻方空袭作战力量顺利对守方重点目标实施空中打击,首先需要封锁和控制综合作战区空域,据此构建其掩护区域,并为战场侦查和实施打击阶段,创造较为安全的空中环境;
第2阶段:战场侦察。攻方利用侦察卫星、电子侦察机、预警机和无人机等装备,对守方重点目标的防御力量进行侦察,从而获得其配置武器装备的地理坐标和性能参数,找出防御薄弱角(如图1所示),并依据攻方装备性能和空袭计划最终划定预警机探测责任区范围;
第3阶段:实施打击。在攻方内层防空预警线以外,使用预警机作为空中指挥所,并派遣战斗机对其护航。预警机对参加空袭的所有空中力量进行指挥控制,并完成远距离空中警戒任务。预警机的使命在整个空袭作战行动完成后方能结束。
本文主要讨论在第3阶段中预警机的阵位选择以及航线规划问题。
2 预警机阵位选择
定义2:攻方战斗机、预警机和守方战斗机均在相同高度层hT飞行,攻方战斗机以vxj匀速飞行,守方战斗机以VT匀速飞行,预警机平飞速度为Va、转弯飞行速度为Vr。
定义3:如图2所示,阴影区域为矩形责任区,θ为守方防御薄弱角,进攻轴分别是它们的垂直平分线和角平分线。责任区近界与守方导弹拦截线相切于进攻轴上的Z1点,且其两端端点为Z2和Z3。攻守双方地(舰)空导弹发射平台均处于海平面高度,且分别以G、F点为圆心构筑阵位线。为能满足攻方战斗机从上任意一点开始空袭行动,所需责任区的长度Ltc和纵深Wtc为:

图2 预警机阵位示意图

式中,lkt是进攻方空袭战斗机横向所需空中机动宽度;wkt是进攻方空袭战斗机纵向所需空中机动宽度;Dfd是守方导弹拦截线半径;Dfjq是守方地(舰)空导弹阵位线半径;dfjk是守方地(舰)空导弹最大射程。
定义4:为了最大化利用实时探测区以覆盖责任区,预警机采用双平行线航线飞行,其直飞航线垂直于进攻轴(可得到更大的实时区探测纵深[6]),航线中心点处于进攻轴E点处,且|AB|=|CD|=L、|AC|=|BD|=W,W是2倍的转弯半径。
定义5:责任区近界既是攻方战斗机实施空袭行动的起点,又是预警机护航飞机的一次拦截近界。攻方战斗机为了增加责任区内作战时间在进入责任区近界前和守方战斗机为了尽早击落预警机在出责任区近界后,均以直线飞行。
确保自身安全且充分发挥固有探测威力,是预警机阵位选择应遵循的基本原则。因此,预警机必须在位于守方战斗机空空导弹最大射程之外区域飞行,且阵位应尽量靠近责任区近界。令攻方机场到责任区近界的垂直距离为Dgz,攻方构筑的导弹拦截线半径为Dgd,守方战斗机空空导弹最大射程为dfkk,预警机从巡航阵位回撤到Dgd-dfkk的距离为dhc,则预警机阵位Dzy可由下式确定:

式中,令攻方地(舰)空导弹阵位线半径为Dgjq,攻方地(舰)空导弹最大射程为dgjk,则攻方导弹拦截线半径Dgd的估算公式为:

显然,回撤距离dhc应以最坏情况进行考虑,即当预警机飞至靠近责任区近界一侧直飞航线与进攻轴交点处时,守方战斗机于责任区近界Z1点处突破一次拦截近界,此时dhc的估算公式为:

式中,转弯直径W估算公式为:

式中,g是重力加速度,β是最大转弯坡度角。
将式(3)~式(5)代入式(2)可得:

式中,攻方机场位置应遵循起飞战机安全和保证进攻战斗机在责任区内作战时间的原则选取,因此,其位于守方导弹拦截线半径内是不合理的,则Dgz的估算公式为:式中,dxj是攻方机场到Z2或Z3点距离,txh是攻方战斗机续航时间,tcb是攻方战斗机储备时间,tzh是攻方战斗机计划在责任区内作战所需时间。

当Va速度足够大时,预警机阵位可进入一次拦截线外守方战斗机空空导弹的射程之内,这显然不合理。另外当攻方机场远离责任区近界时,随VT速度不断增大,预警机阵位可以一直远离责任区近界,但实际只需移至Dgd-dfkk处即可,此时预警机已位于安全空域。因此,可得出预警机实际阵位D′zy为:

3 预警机航线规划
如下页图3所示,阴影部分是预警机最大探测距离为R时的实时探测区[6]。令攻方内层防空预警线半径为Dnc,预警机与攻方内层防空远程警戒雷达之间目标交接时间所需时间为tqj,则预警机情报交接线J1J2距攻方机场的距离为Dnc-vxjtqj。预警机实时探测区可有效覆盖责任区和攻方内层防空预警线至预警机情报交接线的中间区域,且直飞航线L最大,是预警机航线规划所遵循的3个基本原则。L选大的两个理由分别是减少单位时间内频繁转弯操作导致飞行员疲劳和缩短转弯盲区留存时间。不失一般性,设预警机巡航阵位已确定,满足覆盖责任区时的直飞航线最长距离为L1,满足覆盖J1J2时的直飞航线最长距离为L2,且其均应不小于转弯直径W,则实际直飞航线L由下式确定:

式中

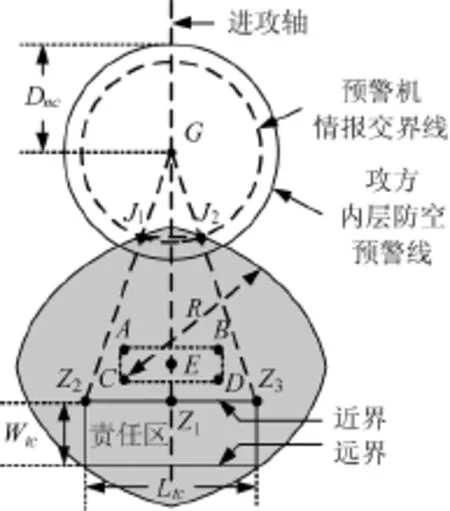
图3 预警机航线规划示意图
式中,R的具体取值决定于预警机机载预警雷达工作模式。通常对空探测时,机载预警雷达可视情选用正常、增程、正常加增程等模式遂行相应的探测任务。从数据率角度考虑,工作模式的优先使用顺序为正常、正常加增程、增程。正常模式、增程模式的最大探测距离分别为R1和R2,且R2>R1。当R=R1,且L1<W或L2<W时,预警机机载预警雷达工作模式应改用增程模式。
4 仿真分析
4.1 参数设置
攻防双方参战飞机及其配属装备、导弹性能参数、地(舰)空导弹阵位线半径和各作战流程消耗时间等如表1所示。

表1 相关参数设置
4.2 D′zy和L与VT的关系
根据典型预警直升机和固定翼预警机的相关技术资料,令lkt=20 km、Va={230 km,600 km,850 km},且设守方战斗机飞行速度VT∈[1 km/h,1 200 km/h],则可得图4所示的D′zy与VT之间的关系曲线。由图可得以下结论:
①D′zy≡110km时,VT≤{332.5km/h,825.9km/h,1 133 km/h},即此时预警机阵位处于责任区近界外dfkk+W/2处,且Va越大预警机实际阵位开始远离最近阵位点时的VT越大。

图4 D′zy与VT的关系曲线
②110 km<D′zy<333.3 km时,当Va不变,VT越大D′zy越大,即预警机平飞速度恒定时,守方战斗机飞行速度越大,预警机实际阵位距离责任区近界越远;当VT不变,Va越大D′zy越小,即守方战斗机飞行速度恒定时,预警机平飞速度越大,其实际阵位离责任区近界越近。
③D′zy≡333.3km时,从VT前面的变化曲线可知,Va越大,D′zy=333.3km时的VT越大,即此时预警机阵位已处于Dgd-dfkk之内,为了充分发挥实时探测区的效能,预警机可停留在Dgd-dfkk处,从而Dzy达到最大值。
当预警机实际阵位确定后,设守方战斗机飞行速度VT∈[1 km/h,3 000 km/h],它参数不变时,则可得图5所示的D′zy与VT之间的关系曲线。由图可得以下结论:
①L≡287.3 km,VT≤{332.5 km/h,825.9 km/h,1 133 km/h},即此时预警机阵位处于责任区近界外dfkk+W/2处,且Va越大预警机直飞航线长度开始变短时对应的VT越大。

图5 L与VT的关系曲线
②20.01 km<L≤287.3 km且VT=({332.5 km/h,508.8 km/h],(825.9 km/h,1 233 km/h],(1 133 km/h,1 666 km/h]}时,L随VT增大而减小,此时预警机处于正常工作模式,说明预警机为了实时覆盖责任区,在VT增大时需要缩短直飞航线L的长度。
③20.01 km<L≤287.3 km且VT=({508.8 km/h,783.5 km/h],(1 233 km/h,1 826 km/h],(1 666 km/h,2 414 km/h]}时,L的变化规律是先突增,然后递减至W。此现象表明当L突增时预警机若采用正常工作模式不能满足作战任务要求(不能实时覆盖责任区),需要及时切换为增程工作模式。
④L≡20.01 km,VT>{783.5 km/h,1 826 km/h,2 414 km/h}时,表明此时预警机即使采用增程工作模式也无法有效遂行作战任务。
4.3 D′zy和L与Ltc的关系

图6 D′zy与Ltc的关系曲线
令VT=1 200 km/h、Va={230 km,600 km,850 km},且Ltc∈[209.04 km,800 km](即lkt∈[0 km,295.48 km]),可得图6所示的D′zy与Ltc之间的关系曲线。由图可得以下结论:
①当D′zy>110 km且209.04 km<Ltc<{670.1 km,615.4 km,426 km}时,D′zy随Ltc的增大而减小,且相同责任区长度时,Va越大预警机实际阵位离责任区近界越近。说明随着责任区的长度增加(空情复杂造成的横向机动宽度增加),攻方机场需要离责任区近界越近,从而造成预警机实际阵位的不断前移。
②当D′zy≡110 km且Ltc≥{670.1 km,615.4 km,426 km}时,说明预警机实际阵位已经处于责任区近界外dfkk+W/2处,为了预警机的安全,不能再靠近责任区。

图7 L与Ltc的关系曲线
预警机实际阵位确定后,L与Ltc之间的关系如图7所示。由此可得出以下结论:
①当Va=230 km/h时,其预警机直飞航线长度始终为转弯直径W,说明预警机以此种平飞速度,即使工作在增程工作模式下,也无法完成作战任务。
②Va={600 km/h,850 km/h},L>20.01 km,且Ltc= {[209.04 km,295.9 km],[209.04 km,516.3 km]}时,L随Ltc增大而减小,此时预警机处于正常工作模式,说明预警机为了实时覆盖责任区,在Ltc增大时需要缩短直飞航线L的长度。
③Va={600 km/h,850 km/h},L>20.01 km,且Ltc= {(295.9 km,656.5 km],[516.3 km,656.5 km]}时,L的变化规律是先突增,然后递减至W。此现象表明当L突增时预警机若采用正常工作模式不能满足作战任务要求(不能实时覆盖责任区),需要及时切换为增程工作模式。
④Va={600 km/h,850 km/h},L≡20.01 km,且Ltc>{656.5 km,656.5 km}时。此现象表明此时预警机即使采用增程工作模式也无法有效遂行作战任务。
⑤Va={600km/h,850km/h},分别出现的拐点A、B是由于预警机实际阵位已处于责任区近界外dfkk+ W/2处造成,在拐点之后由于预警机实际阵位将不再发生变化,因此,预警机直飞航线长度只随责任区长度的变化而改变,所以无论预警机平飞速度多大,其最大可覆盖责任区的长度为656.5 km。
5 结论
根据攻防双方主要作战力量的性能,本文针对重点目标进行空袭作战中预警机的阵位设置与航线规划问题,提出了4条合理可行的预警机前伸阵位设置与航线规划的原则,构建了其实用的规划模型,所建模型考虑了各种主要的内、外因素。通过仿真,分析了主要参数对预警机阵位和航线的影响。提出的阵位设置与航线规划原则、定量模型以及仿真结论,可供实际预警机兵力部署决策时参考使用。本文是基于无加油机情况下构筑的模型,如果加油机参与空袭作战,文中模型可退化为设定合理的地(舰)空导弹拦截线位置,为预警机回撤构筑安全空域,则其他模型依然有效。本文预警机阵位设置尚未考虑与其他电子战飞机的协同问题,航线规划也未涉及多架预警机协同问题,这些问题均有待进一步研究。
[1]程子光,姜礼平,朱建冲,等.大型海上编队空中警戒力量优化部署[J].电光与控制,2013,20(2):57-60.
[2]徐圣良,吴晓锋,王振波.航母编队进入综合作战区后预警机阵位研究[J].舰船电子工程,2008,28(1):41-44.
[3]沈治河,朴成日.航母编队在对空防御中预警机空域配置的方法[J].指挥控制与仿真,2012,34(6):14-17.
[4]周晓光,赵仁厚,冯百胜,等.舰载预警机防空预警探测距离需求分析[J].指挥控制与仿真,2014,36(2):14-17.
[5]陈云翔,张毅,庄骏,等.基于作战方向的预警机需求确定方法[J].火力与指挥控制,2014,39(8):1396-1399.
[6]刘波,沈齐,李文清.空基预警探测系统[M].北京:国防工业出版社,2012:211-215.
AEW Location Selection and Course Programming of Air-Raid Operations
QI Wei,LI Xia,CAI Wan-yong,LU Qian-hong
(Air Force Early Warning Academy,Wuhan 430019,China)
Estimation model for AEW location selection is built,with AEW(Aircraft Early Warning)demands while air-raid operation,and with background of air-raid operation scenario. Quantitative formula of AEW course programming are given,based on real-time detection ability,and influence is discussed while operation mode changed.Relations between major parameters and AEW location and the course are analyzed with simulation,of which the results are practically valuable.
air-raid,AEW,location selection,course programming
E925;TJ85
A
1002-0640(2016)12-0064-05
2015-11-08
2015-12-26
湖北省自然科学基金资助项目(2015CFB607)
祁炜(1981-),男,湖北黄冈人,博士研究生。研究方向:预警装备效能评估与验证。
猜你喜欢
北京航空航天大学学报(2021年4期)2021-11-24
小哥白尼(军事科学)(2021年5期)2021-08-30
汽车观察(2019年9期)2019-10-22
新能源汽车报(2018年33期)2018-05-14
企业文化(2017年21期)2017-10-19
企业文化·下旬刊(2017年7期)2017-07-21
科技与企业(2015年18期)2015-10-21
专用汽车(2015年4期)2015-03-01
北京教育·普教版(2014年2期)2014-03-14
小哥白尼·军事科学画报(2009年4期)2009-05-11
