
基于Rényi信息增量的机动目标协同跟踪算法*
2017-01-17 07:27谷雨石晶辉石弯弯董华清彭冬亮
火力与指挥控制 2016年12期
谷雨,石晶辉,石弯弯,董华清,彭冬亮
(1.杭州电子科技大学通信信息传输与融合技术国防重点学科实验室,杭州310018;2.首都航天机械公司,北京100076)
基于Rényi信息增量的机动目标协同跟踪算法*
谷雨1,石晶辉2,石弯弯1,董华清1,彭冬亮1
(1.杭州电子科技大学通信信息传输与融合技术国防重点学科实验室,杭州310018;2.首都航天机械公司,北京100076)
针对基于多传感器组网进行机动目标跟踪的传感器管理问题,提出了一种基于Rényi信息增量的机动目标协同跟踪算法。首先结合“当前”统计模型和交互式多模型不敏卡尔曼滤波算法设计了一种变结构多模型算法,来进行机动目标的状态估计;然后以Rényi信息增量为评价准则,选择使Rényi信息增量最大的单个传感器进行目标跟踪;最后利用得到的最优加速度估计进行网格划分,更新变结构多模型中的模型集合。在一般机动及强机动场景下进行了算法性能分析,仿真结果表明,该算法能够合理地选择传感器,提高了对机动目标的跟踪精度。
协同跟踪,Rényi信息增量,变结构多模型,网格划分,“当前”统计模型
0 引言
随着军事电子技术的发展,利用单传感器对机动目标进行检测、跟踪和识别已经无法满足需求,而多传感器组网能够通过各单传感器间的协同实现资源的有效利用,从而提升对机动目标的跟踪性能[1]。交互式多模型(Interacting multiple model, IMM)算法[2-4]是一类典型的机动目标跟踪算法,通过采用由多个固定模型组成的模型集来描述目标的可能运动模式。随着滤波技术的发展,学者们不断地将IMM与其他滤波器相结合,提出了多种有效的机动目标跟踪算法。由于该模型集合是固定的,当模型失配时IMM算法会造成跟踪精度下降。此后,研究学者提出了变结构多模型算法[5],其根据目标的状态估计合理地确定目标的可能模型集合,是一种更有效的机动目标跟踪算法。
在多传感器组网中,协同跟踪是利用跟踪信息的融合结果对传感器资源进行动态分配,并作为反馈环节使多传感器信息融合系统形成闭环控制系统[6]。本质上,协同跟踪是在传感器管理的基础上实现了传感器组网的整体跟踪性能最优。目前解决多传感器管理的方法主要见文献[7-10]。
针对利用多传感器组网进行机动目标跟踪的传感器管理问题,提出了一种基于Rényi信息增量的机动目标协同跟踪算法[11]。通过仿真实验验证了提出算法的有效性。
1 问题描述
假设目标的运动方程为

其中wk为系统过程噪声。
假设传感器组网中的传感器为雷达,则第j个传感器的观测方程为:

其中(xk,yk)表示k时刻目标的位置,(Ysensorxj,Ysensoryj)为第j个传感器的位置,nrj与nθj分别为第j个传感器的距离观测噪声和角度观测噪声。
若多雷达组网中每一时刻只允许选择一部雷达进行目标跟踪,当采用基于Rényi信息增量的传感器管理方法寻找k时刻为系统带来最多信息的传感器jk,其目标函数可描述为:

其中,[Dα(p1||p0)]jk为k时刻传感器j的Rényi信息增量;m为组网中传感器总数;jk为k时刻所选出的最佳传感器。
2 结合“当前”统计模型和IMMUKF的变结构多模型算法
目标可能的运动模型包括CV、CA、CT和Singer模型等,本文采用式(4)描述的变加速度模型来描述目标的运动模型。

由于“当前”统计模型(Current Statistics,CS)[12]采用修正的瑞利分布来描述目标机动加速度的统计特征,故可利用其估计目标可能的加速度。本文结合“当前”统计模型和IMMUKF设计了一种变结构多模型算法,由交互作用器、多个UKF滤波器、模型概率估计器和估计混合器组成,并利用网格划分技术[11]在线更新目标的可能模型集合。该算法流程为将上一时刻得到的最优估计初始化,作为这一时刻的交互输入值;然后各CS模型利用UKF滤波器平行滤波,获得系统的状态估计;再利用模型概率估计器更新各模型的概率;然后估计混合器交互输出;最后利用最终选择得到的最优加速度估计进行网格划分,旨在生成目标下一时刻可能的模型集合,即采用变加速度模型来描述目标的运动模式。具体滤波步骤如下:
①输入交互
各个模型初始状态Xi(k-1|k-1)及其协方差矩阵Pi(k-1|k-1)通过交互和混合得到各模型混合概率μij(k-1|k-1),输入混合状态估计值Xoj(k-1|k-1),Poj(k-1|k-1)。
②各个CS模型利用UKF滤波器平行滤波,得到各模型k时刻状态估计Xj(k|k),Pj(k|k),通过量测预测值Z(k|k-1)、量测预测残差Sj(k)得到各模型的似然度:

③模型概率更新
④估计融合

⑤网格划分
网格划分[11]的基本思路为:假设最优加速度估计Sˆk位于下页图1中▲位置,初始设定9个加速度模型组成一个粗略的模型集合M,M={ai,i=0,1,…,8},然后根据得到的最优加速度估计调整网格,动态生成一个与目标真实运动模式更匹配的精确的细网格(即新的模型集合Ck+1={aij,i=1,…,4;j=0,1,…,4},i为象限数、j为模型数),并用于下一时刻的滤波估计。网格划分过程如图1所示。
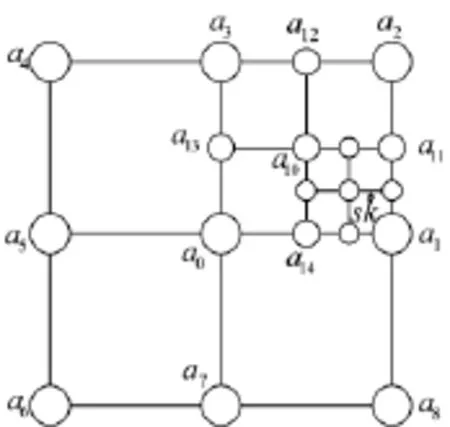
图1 自适应网格划分
3 基于Rényi信息增量的协同跟踪算法
针对多雷达组网中每一时刻只允许选择一个传感器进行单机动目标跟踪的问题,利用前述算法估计得到目标的状态后,采用Rényi信息增量进行传感器的选择,从而实现对机动目标的有效跟踪。
Rényi熵是Shannon熵的广义形式,用以描述一个事件的信息,反映了系统信息的高阶特性。假设先、后验概率密度函数p0、p1服从高斯分布p0~G(μ0,∑0),p1~(μ1,∑1),基于Shannon熵的信息增量[15]为:

Rényi信息增量被定义为:

若采用以卡尔曼滤波为代表的滤波算法,当得到目标状态估计的均值和协方差时,Rényi信息增量的计算公式可简化为[10]:
其中参数选取α=0.5可获得较好的跟踪性能[13]。
前述变结构多模型算法是针对利用单传感器进行目标跟踪的,当利用多传感器时,对传感器进行最优选择后,由于能够获得目标更准确的测量信息,此时利用估计得到的状态信息进行网格划分,在线更新目标可能的状态,有利于提高目标跟踪的精度。设计的基于Rényi信息增量的协同跟踪算法流程如图2所示。
4 仿真分析
假设目标在X-O-Y平面飞行,观测噪声均为闪烁噪声[14-15],传感器S1、S2、S3的测量标准差均为100 m,15 mrad,闪烁效应对应的测量标准差均为300 m,45 mrad,闪烁效应系数ε=0.05。过程噪声方差Q=E{w(k)w(k)T},其中w(k)是零均值、高斯过程白噪声序列,采样周期T=1 s,amax=[50 50]T,机动频率α取1/60,本文算法粗略模型集如下:a0=[0 0]T,a1=[40 0]T,a2=[40 40]T,a3=[0 40]T,amax=[-40 40]T,a5=[-40 0]T,a6=[-40-40]T,a7=[0-40]T,a8=[40 -40]T。各模型的初始概率为1/4,MonteCarlo仿真的次数为100次。本文所采用的仿真软件为Matlab8.1。
仿真场景1:目标运动模型为CA、CV。
①一般机动情况:目标在整个过程中的加速度变化如下页表1所示。
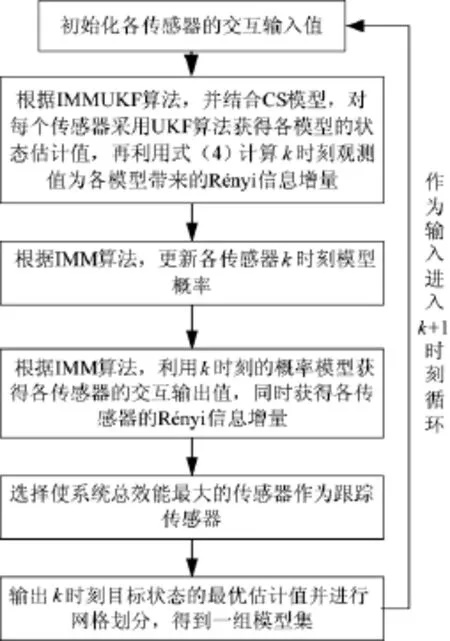
图2 基于Rényi信息增量的机动目标协同跟踪算法框图


表1 一般机动情况下各时刻加速度
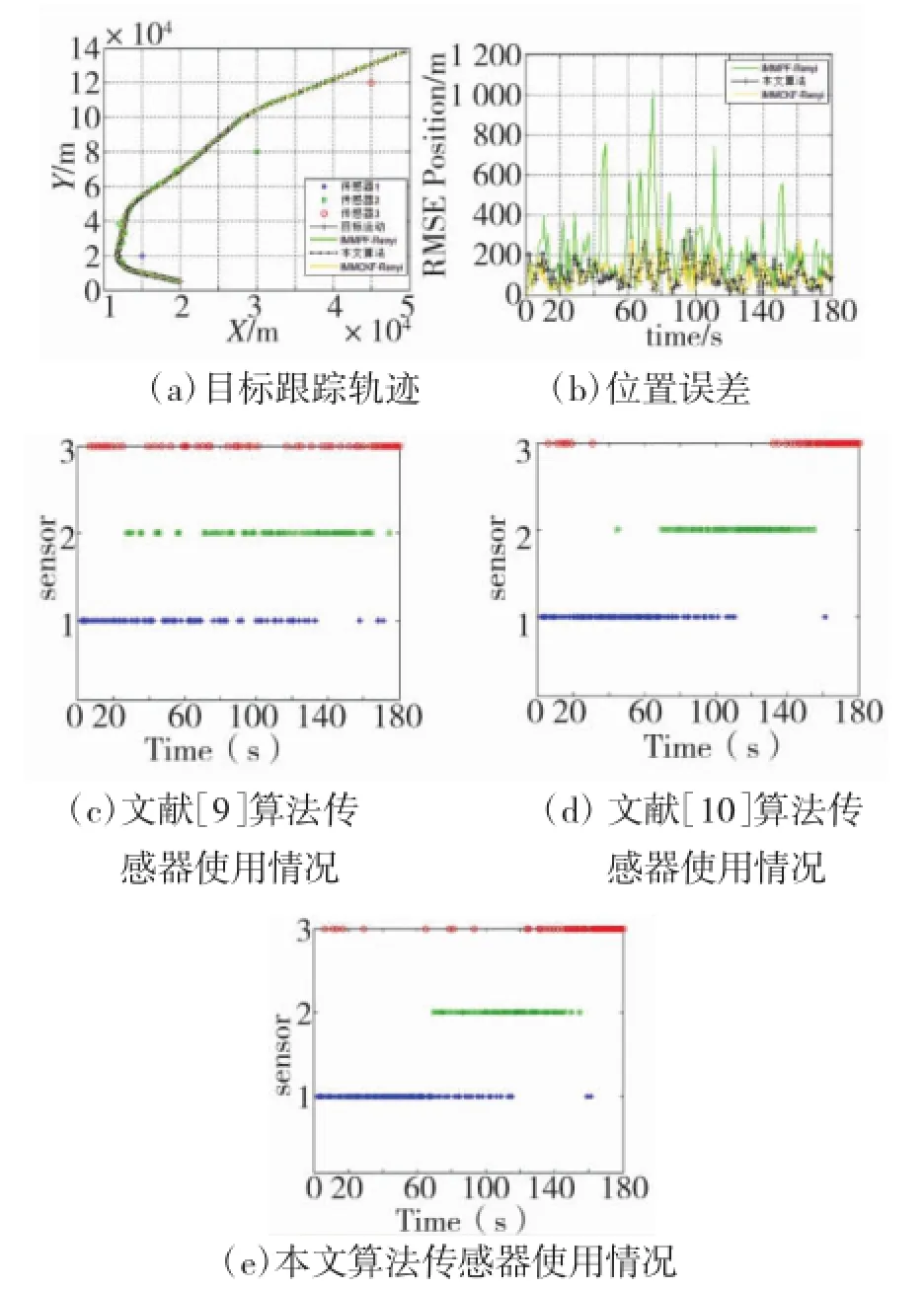
图3 一般机动情况下3种算法性能比较

表2 一般机动情况下3种算法性能比较
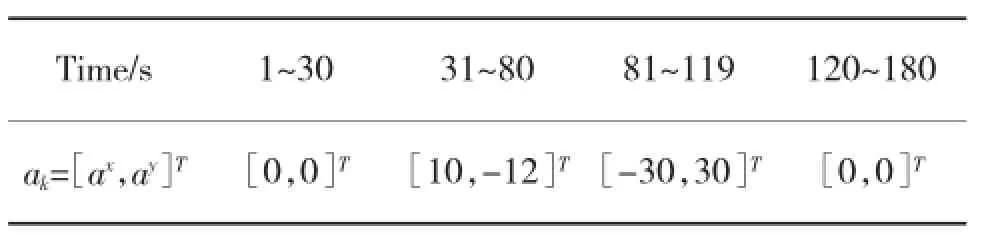
表3 强机动情况下各时刻加速度
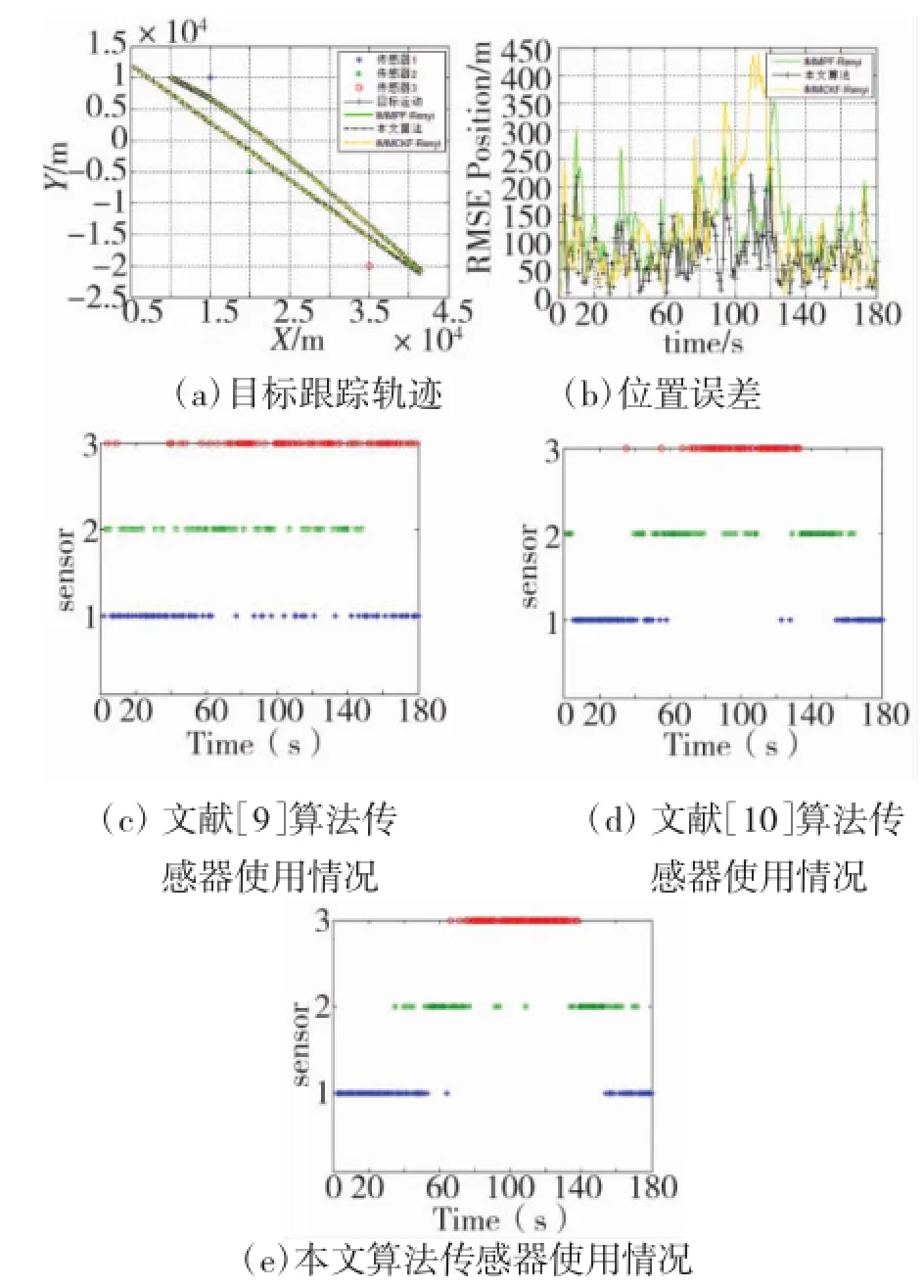
图4 强机动情况下3种算法性能比较
3种算法的均方根误差如表4所示:
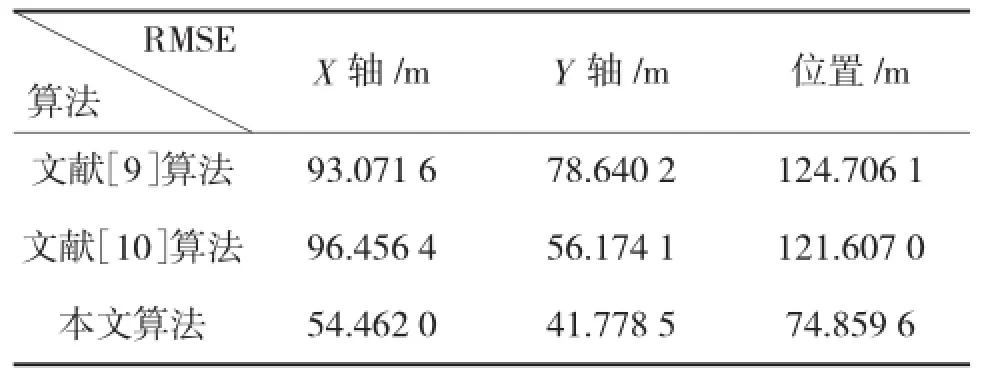
表4 强机动情况下3种算法均方根误差
当目标运动模式为CA,CV时,对于一般机动及强机动情况,本文算法利用CS模型实时修正加速度分布,并通过方差反馈到下一时刻的滤波增益中,实现闭环自适应跟踪,并与IMMUKF相结合进行滤波估计。从表2和表4可知,跟踪性能要优于文献[9]、文献[10]算法。其中,在强机动情况下效果更为明显。另一方面,与目标的距离远近决定传感器的探测性能,从图3、图4中3种算法的传感器使用情况看,本文算法和文献[10]算法传感器使用情况最佳,与传感器和目标间的距离相对应,说明简化计算Rényi信息增量是有效的。
仿真场景2:
表5 仿真场景2的各时刻角速度
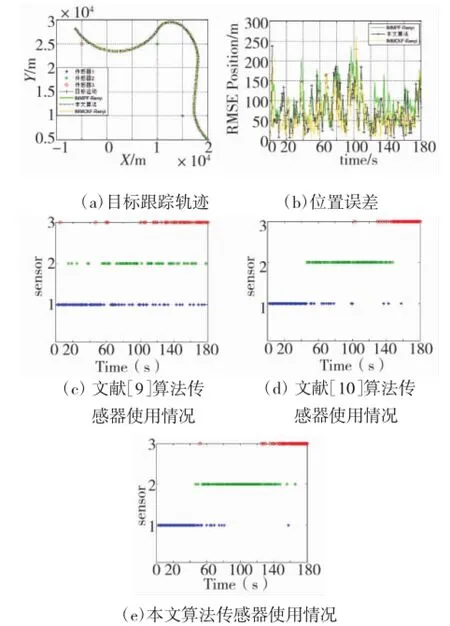
图5 仿真场景2的3种算法性能比较
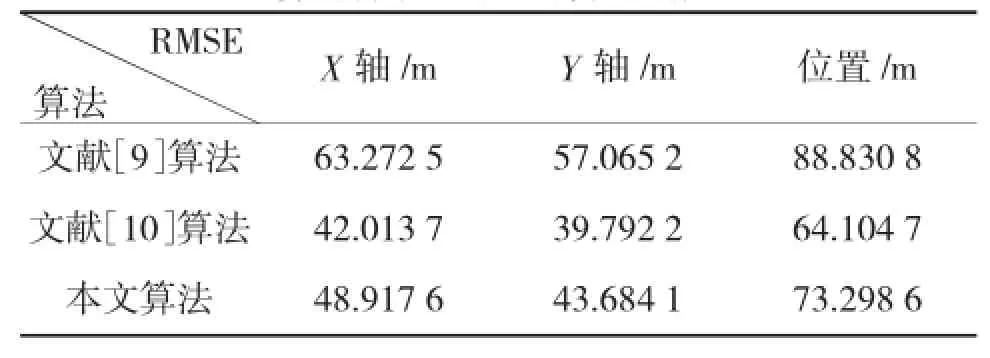
表6 仿真场景2的3种算法均方根误差

表7 仿真场景2的各时刻角速度

图6 仿真场景2的3种算法性能比较
3种算法的均方根误差如表8所示。
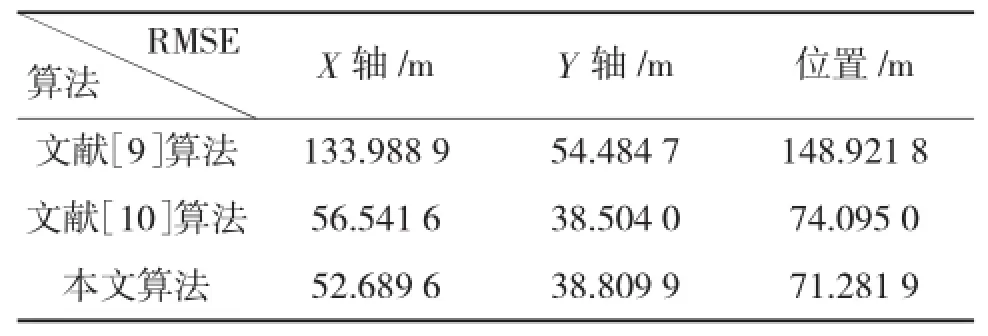
表8 仿真场景2的3种算法均方根误差
由图5、表6可知,对于目标运动模型为CV、CT时,由于CS模型性能依赖于加速度参数,跟踪性能受到加速度参数的影响,且修正的瑞利分布本身的局限性,使得模型无法快速、精确地描述目标运动的加速度情况,导致跟踪精度略微下降,这也是CS模型一个固有的缺陷。而文献[10]算法的滤波模型本身含有协同转弯模型,故在CT场景下性能最优;另一方面,从图5、图6中传感器使用情况看,文献[9]算法中由于计算Rényi信息增量时将积分运算转换为求和运算,可能导致传感器选择不准确而影响跟踪精度,文献[10]算法和本文算法传感器选择情况最优;由表8可知,当目标运动模型为CV、CT、CA时,本文算法表现出自身优势,跟踪精度略高于其他算法。因为变结构多模型算法是采用变加速度模型集来描述目标可能的运动模式,因此,具有更好适应性。
5 结论
本文针对多雷达组网中机动目标跟踪问题,提出了一种基于Rényi信息增量的机动目标协同跟踪算法。结合“当前”统计模型和IMMUKF设计了一种变结构多模型算法来解决目标状态估计问题,并以Rényi信息增量最大为评价准则来选择最佳单传感器进行跟踪,最后通过网格划分动态生成目标在下一时刻可能的运动模型集合。当目标出现强机动情况时,本文算法优势明显,其他场景下与文献[10]算法跟踪性能相当,均优于文献[9]算法。仿真实验结果表明本文算法能够合理选择最优传感器进行目标状态估计,实现协同跟踪。
[1]彭冬亮,文成林,薛安克.多传感器多源信息融合理论及应用[M].北京:科学出版社,2010:183-229.
[2]许天野,徐雪松.交互多模型算法在目标跟踪领域的应用[J].四川兵工学报,2013,34(11):116-119.
[3]JULIER S J,UHLMANN J K.Unscented filtering and nonlinear estimation[J].Proceedings of the IEEE,2004,92(3):401-422.
[4]BOERS Y,DRIESSEN J N.Interacting multiple model particle filter[J].IEE Proceedings-Radar,Sonar and Navigation,2003,150(5):344-349.
[5]于红娟,牛竹云,张春涛,等.基于变结构多模型的机动目标跟踪算法[J].火力与指挥控制,2012,37(S1):36-39.
[6]刘钦.多传感器组网协同跟踪方法研究[D].西安:西安电子科技大学,2013.
[7]罗开平,姜维,李一军.传感器管理述评[J].电子学报,2010,38(8):1900-1907.
[8]AUGHENBAUGH J M,LA COUR B R.Metric selection for information theoretic sensor management[C]//11th International Conference on Information Fusion,2008:1-8.
[9]刘钦,刘峥.一种基于Renyi信息增量的机动目标协同跟踪方法[J].控制与决策,2012,36(9):1437-1440.
[10]刘欣怡,赵诚,单甘霖,等.面向目标跟踪的基于Rényi信息增量多的传感器管理[J].信息与控制,2015,34(2):184-189.
[11]何丹敏,彭冬亮,石弯弯,等.基于“当前”统计模型的混合网格多模型算法[J].光电工程,2015,42(7):49-54.
[12]简金蕾,李静,任宏斌,等.基于“当前”统计模型的自适应不敏卡尔曼滤波算法[J].现代雷达,2011,33(9):48-52.
[13]LIU Y,WANG H,HOU C.UKF based nonlinear filtering using minimum entropy criterion[J].IEEE Transactions on Signal Processing,2013,61(20):4988-4999.
[14]李彬彬,冯新喜,王朝英,等.基于信息增量的多被动传感器资源分配算法[J].系统工程与电子技术,2012,34(3):502-507.
[15]胡洪涛,敬忠良,李安平,等.非高斯条件下基于粒子滤波的目标跟踪[J].上海交通大学学报,2004,38(12):1996-1999.
A Maneuvering Target Collaboration Tracking Algorithm Based on Rényi Information Gain
GU Yu1,SHI Jing-hui2,SHI Wan-wan1,DONG Hua-qing1,PENG Dong-liang1
(1.Fundamental Science on Communication Information Transmission and Fusion Technology Laboratory,
Hangzhou Dianzi University,Hangzhou 310018,China;2.Captial Spaceflight Machinery Company,Beijing 100076,China)
To solve sensor management problem when tracking one maneuvering target using multiple netted sensors,the maneuvering target collaboration tracking algorithm based on Rényi information gain is proposed.A variable structure multiple model algorithm combining current statistics model and interacting multiple model unscented kalman filter is first proposed to estimate the states of maneuvering target.One sensor is then selected according to maximal Rényi information gain to perform target tracking.Grid partition is finally performed by estimation of the optimal acceleration to update possible model sets of the target.The performance of the proposed algorithm is analyzed in general and strong maneuvering scenarios,and simulation results demonstrate that the proposed algorithm can select the optimal sensor reasonably and improves the accuracy for maneuvering target tracking.
collaborative tracking,Rényi information gain,variable structure multiple model,grid partition,current statistic model
TP273
A
1002-0640(2016)12-0025-06
2015-11-09
2015-12-27
国家自然科学基金资助项目(61174024)
谷雨(1982-),男,吉林双阳人,博士,副教授。研究方向:目标跟踪、视觉伺服。
猜你喜欢
当代水产(2022年6期)2022-06-29
北京航空航天大学学报(2022年5期)2022-06-06
当代陕西(2022年6期)2022-04-19
当代水产(2021年8期)2021-11-04
当代陕西(2019年12期)2019-07-12
汉语世界(The World of Chinese)(2019年1期)2019-03-18
妇女生活(2019年1期)2019-01-17
汽车观察(2018年12期)2018-12-26
金桥(2018年4期)2018-09-26
劳动保护(2018年8期)2018-09-12
