直接数据域空时自适应单脉冲方法
2016-12-24 07:06吴仁彪
系统工程与电子技术 2016年12期
王 璐, 吴仁彪
(中国民航大学智能信号与图像处理天津市重点实验室, 天津 300300)
直接数据域空时自适应单脉冲方法
王 璐, 吴仁彪
(中国民航大学智能信号与图像处理天津市重点实验室, 天津 300300)
机载雷达空时自适应处理(space-time adaptive processing,STAP)与单脉冲技术相结合可以实现对运动目标空、时参数的估计。然而,在非均匀环境下,由于同分布快拍数有限,杂波协方差矩阵难以准确估计,常常导致STAP方法性能急剧下降甚至失效,进而无法有效实现目标检测和参数估计。本文提出一种直接数据域的动目标空时参数估计方法,该方法首先应用幅相估计谱(amplitude and phase estimation,APES)谱估计由被检测单元数据估计出杂波干扰协方差矩阵,然后利用STAP技术抑制杂波和干扰,并结合单脉冲理论实现对目标角度和多普勒频率的估计。仿真结果表明,与传统单脉冲方法相比,新方法具有自适应抑制杂波干扰的能力和更好的估计性能;同时由于无需参考数据,该方法更适应于非均匀环境。
机载雷达; 空时自适应处理; 单脉冲技术; 非均匀杂波
0 引 言
单脉冲技术[1-2]是获取目标方位信息的一种常规方法,该方法能够利用单个回波脉冲信号进行角度估计,并在分辨力上突破波束宽度的限制,是基于代价函数的最大似然(maximum likelihood, ML)方法的近似。为抑制干扰对单脉冲方法的影响,一些学者提出了自适应单脉冲技术[3-4],并研究了主/旁瓣干扰、子阵结构误差等问题,提出了基于鉴角曲线修正的自适应单脉冲算法[5-6]。
然而,当单脉冲应用于机载相控阵雷达中时,由于下视工作的机载相控阵雷达将接收到分布范围广、强度大的地面杂波,使一般的自适应单脉冲技术性能大大降低,甚至失效。同时,由于机载雷达安装在运动平台上,其接收的杂波将在多普勒维扩展开来,杂波谱呈现空时二维耦合特性。因此,通常首先采用空时自适应处理(space-time adaptive processing,STAP)技术[7]有效地抑制地杂波,然后在空时二维实施单脉冲技术进行参数估计。文献[8-9]针对机载相控阵雷达系统提出了一种空时二维自适应单脉冲测角方法,实现了二维自适应滤波与单脉冲测角技术的兼容,且能同时获得对角度、多普勒频率参数的估计。但迄今为止,此类空时自适应单脉冲方法在非均匀环境下的应用尚少有讨论[10]。
非均匀环境指杂波功率起伏、干扰目标、孤立干扰以及杂波距离相关性等情况随时间的变化。这将导致STAP处理所需要的满足独立同分布(independent and identically distributed, IID)条件的参考数据大大减小[11]。通过对实测数据的分析,人们意识到杂波非均匀性对STAP算法杂波抑制性能的影响非常严重[12]。因此,适用于非均匀环境下STAP算法成为研究热点。当前出现的非均匀STAP算法可以分为以下5类:①功率非均匀抑制法,此类方法假定非均匀性主要表现为杂波功率非均匀,其中一种典型的功率非均匀抑制方法是功率选择训练法(power selected training,PST)[13];②非均匀检测器(no homogenous detector,NHD)[14],此类方法主要用来解决由干扰目标引入的非均匀问题,其中Melvin等人提出用广义内积NHD来检测和剔除包含干扰目标的训练样本,以改善对杂波协方差矩阵的估计;③直接数据域(direct data domain,DDD)算法[15],此类算法可以仅利用被检测样本来消除距离非均匀杂波的影响,但其对被检测目标的角度、速度参数误差较敏感;④杂波距离相关性补偿法[16],此类方法主要用来解决非正侧面阵、共形阵和双多基地机载雷达中由杂波距离相关性引起的非均匀问题,即杂波多普勒频率随着距离的变化而变化的现象;⑤基于先验信息的STAP方法,此类方法包括参数化STAP方法[17]、结构化STAP方法[18]、基于先验知识的STAP方法[19]等。这些方法均有力地促进了STAP技术的实用化进程,为非均匀环境下STAP算法与单脉冲技术的结合提供了思路。
本文就非均匀环境下机载相控阵雷达动目标参数估计问题提出一种新方法,该方法直接由被检测单元数据得到杂波协方差矩阵,再利用空时二维自适应单脉冲技术估计目标空时参数,更适用于机载雷达的应用条件,估计误差更低;又由于新方法不需要参考数据,所以可以实现在非均匀环境下的应用。
1 问题描述
考虑机载平台上沿航向方向放置的N元均匀线阵(uniform linear array,ULA),相干处理间隔(coherent processing interval,CPI)内有K个脉冲,假定单个距离门内最多存在一个目标,则被检测单元的空时快拍为
x=ba(us,ut)+xc+xj+xn
(1)
式中,x,xc,xj,xn均为NK×1的列向量,分别表示被检测单元内接收的空时数据、数据中的杂波分量、干扰分量和噪声分量;b表示相应距离单元内目标回波的复幅度;a(us,ut)为目标的空时二维导向矢量,定义为
a(us,ut)=a(ut)⊗a(us)
(2)
式中,⊗表示Kronecker积,且时域导向矢量和空域导向矢量分别为
a(ut)=[1exp(jut)exp(j2ut) …exp(j(K-1)ut)]T
(3)
a(us)=[1exp(jus)exp(j2us) …exp(j(N-1)us)]T
(4)
式中,us=2πdcosθ/λ;ut=2πfd/fr表示归一化空间角频率和时间角频率。
本文主要研究的问题是利用式(1)的被检测距离单元数据(即被杂波、干扰和噪声污染的空时接收数据)估计出目标的归一化空间角频率us=2πdcosθ/λ和时间角频率ut=2πfd/fr。可以看出两者由目标所处的方位角θ、系统工作波长λ、目标多普勒频率fd和脉冲重复频率fr所决定。因而,估计出归一化空、时角频率后即能对目标的角度、速度进行反求,即
(5)
常用的空时二维自适应技术属于基于统计的方法,是用被检测单元相邻的距离单元的数据作为参考数据来估计杂波协方差矩阵,进而抑制地杂波,如文献[8-9]的空时二维自适应单脉冲处理即属于这种基于统计的方法。而由于非均匀杂波环境中满足独立同分布(independent and identically distributed,IID)的参考数据较少,甚至没有,使上述方法估计的杂波协方差矩阵与被检测单元的统计特性偏差较大。这严重影响了杂波抑制性能,进而影响了参数估计性能。因此,需要寻找非均匀环境下新的杂波协方差矩阵估计方法。
2 杂波协方差矩阵估计
本节给出一种基于降维处理的直接数据域杂波协方差矩阵估计方法。首先用一个Nt×Kt的空时窗在被检测单元数据矩阵X上滑动,对被检测单元数据进行降维处理,如图1所示,其中Nt和Kt分别表示滑窗的空间和时间维度。

图1 空时窗在被检测单元数据上滑动示意图Fig.1 Sketch map of the space-time window sliding over the primary data
经过在空间向的第m次和时间向的第n次滑动后,乘上相应的相位补偿因子,得到的子块数据如下:
(6)
式中,m=0,1,…,(N-Nt)、n=0,1,…,(K-Kt)。将式(6)中的数据块按列排成NtKt×1的列向量y(m,n)=vec(Y(m,n)),称为子快拍,得到总的子快拍数为P=(N-Nt+1)×(K-Kt+1)。这些子快拍含有目标的信息,且能准确反映被检测单元的杂波、干扰的统计特性。
用这些子快拍计算降维数据协方差矩阵
(7)
式中,Rsub的维度为NtKt×NtKt,该矩阵的理论值应为
Rsub=E{y(m,n)yH(m,n)}=
(8)
(9)




(10)

(11)
因此,优化方程式(10)可以简写为下面的二次优化问题:

(12)
(13)
利用拉格朗日乘数法求解上面的方程,得到目标导向矢量的估计为
(14)
将式(14)代入优化方程式(13)的约束等式,可确定拉格朗日乘子λ的取值满足下面的关系:

(15)
3 空时自适应单脉冲处理
本节结合空时二维自适应单脉冲算法(主要为了解决地杂波问题)和线性约束单脉冲算法(主要为了解决主瓣干扰问题),给出一种适用于严重非均匀环境的动目标参数估计方法。
首先,依据常规空时单脉冲处理,当波束指向为(u0,s,u0,t)时,系统的空时2维和波束可表示为
(16)
式中,wΣ(u0,s,u0,t)为和波束的空时2维加权矢量,该矢量的选择将影响系统和波束的杂波抑制能力、主副瓣参数等。类似地定义空域差波束和时域差波束
(17)
(18)
式中,ws(u0,s,u0,t),wt(u0,s,u0,t)分别为相应的空域差波束及时域差波束的空时2维加权矢量。再定义空域单脉冲比Fs(us,ut)和时域单脉冲比Ft(us,ut)分别为
Fs(us,ut)=Re(Δs(us,ut)/Σ(us,ut))
(19)
Ft(us,ut)=Re(Δt(us,ut)/Σ(us,ut))
(20)
式中,Re(·)表示取实部。对式(19)和式(20)在波束指向(u0,s,u0,t)附近进行Taylor展开
+
(21)

(22)

(23)

(24)
式中,ks和kt分别为波束指向(u0,s,u0,t)上的静态空域及时域单脉冲鉴角率。

(25)

对于空域差波束加权矢量ws(us,0,ut,0),应满足使得残余杂波能量最小化的同时,在单脉冲比、单脉冲鉴角率、互单脉冲鉴角率等方面与静态时保持一致,即求解优化问题
s.t.Fs(us,0,ut,0)=0


(26)
式中,ks为波束中心处的静态空域单脉冲鉴角率。
(27)
(28)
因此,式(26)可化简为

(29)
解式(29)得到空域差波束加权矢量为
(30)
同理可以得到时域差波束加权矢量为
(31)
式中,gt=[0, 0,kt],kt为波束中心处的静态时域单脉冲鉴角率。
为补偿降维处理造成的信息损失,进一步提高参数估计准确性,对被检测单元数据进行滑动平均处理
(32)
式(25)、式(30)、式(31)的自适应和差波束加权矢量对式(32)数据加权结果即为和差波束输出值,由此可得到自适应单脉冲比
(33)
依照式(26)的约束准则设计的自适应波束可满足在波束中心处的空域、时域单脉冲比皆为零且相互独立,单脉冲鉴角率与静态空域及时域单脉冲鉴角率一致,因此,估计方程简化为
(34)
4 仿真实验
本节仿真了严重非均匀环境下被检测单元数据分布与其他距离单元不同的情况,以考察所提的无需参考数据的空时自适应单脉冲方法的适用性。实验中的雷达系统参数为:采用沿平台运动方向布置的N=16元均匀线阵,阵元间隔半波长d=0.5λ。雷达工作波长为0.23 m,载机速度为va=140 m/s,平台高度为8 000 m,雷达最大作用距离Rmax=400 km,脉冲重复频率为fr=2 434.8 Hz,CPI内有K=22个脉冲。
雷达工作环境如下:一个压制性干扰位于方位120°,干噪比JNR=80 dB。某距离单元存在一个干扰目标,位于方位91°,其归一化时间频率为-0.22,JNR=80 dB。杂波存在功率非均匀的情况,即沿距离向杂波功率随机分布,被检测单元的杂噪比CNR=60 dB。以低速目标的空时参数估计为例给出性能分析,考虑波束中心位于(0,-0.2)。实验中,本文提出的基于降维处理的直接数据域空时自适应单脉冲方法选择的空时滑窗的维度为Nt=8,Kt=8;进而得到总的子快拍数P=135。
图2给出了上述严重非均匀情况下单脉冲比的情况,横/纵坐标均用全孔径时静态和波束的3 dB波束宽度归一化。其中,“FDO”是指全维最优处理(full dimension optimum processing),即用被检测单元的理论杂波、干扰协方差矩阵进行和、差波束形成所对应的空时二维自适应单脉冲比,这是一种理论的最优情况在实际中并不能得到;“FDA”是指全维自适应处理(full dimension adaptive processing),即按统计集平均的方法利用被检测单元邻近的多个距离单元的参考数据估计杂波、干扰协方差矩阵进行和、差波束形成获得的空时二维自适应单脉冲比; “RDA” 是指降维自适应处理(reduced dimension optimum processing),即本文提出的无参考单元的方法;“FDQ” 和“RDQ”分别为用于比较的全维静态(full dimension quiescent)和降维静态(reduced dimension quiescent)的情况。由图2可见,FDO和RDA方法的单脉冲比都与各自的静态单脉冲比相似,因此这两种方法的参数估计性能将比较好;而FDA方法偏离静态单脉冲比的情况比较严重,这是由于严重非均匀环境下,与被检测单元相邻的快拍数据不具有同分布特性,引起了协方差矩阵估计误差。

图2 严重非均匀情况下单脉冲比曲线比较土Fig.2 Comparison of the monopulse ratios under seriously nonhomogeneous enviroments
图3和图4通过改变噪声样本各进行200次蒙特卡罗实验,得到了均方根误差(root mean square error,RMSE)随目标位置及输入信噪比变化的曲线,图中的横/纵坐标均用全孔径时静态和波束的3 dB波束宽度归一化。RMSE反映了样本偏离均值的程度(即标准差),其定义为
(35)

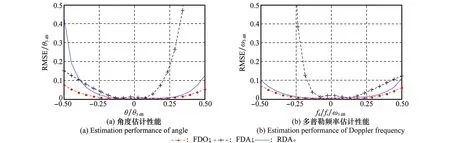
图3 估计性能随目标位置变化情况Fig.3 Comparison of the estimation performance versus varied positions of the target
在图3所示的实验中,SNR=0dB,目标位置在主瓣内变化。由图可见,FDO方法具有最好的估计性能,这是由于一方面这种方法的单脉冲比线性特性保持的比较好(但由于波束窄,单脉冲比的线性区域比较小),另一方面这种方法用到理论杂波、干扰协方差矩阵,这就保证了能较好的实现自适应杂波抑制;而FDA方法的估计性能非常差,这是由于在上述两方面此种方法都不能满足;对比这两种情况可知,杂波非均匀对全维方法的估计性能影响很大。而所提的RDA方法,其估计性能与理论情况FDO近似,明显优于需要大量参考数据的FDA方法。
在图4所示的实验中,输入信噪比的范围为-10~20dB,感兴趣的动目标位于方位88°,与载机之间相对速度对应的归一化多普勒频率为-0.177(相当于在空间向和时间向各偏离波束中心半个3dB波束宽度)。由图可见,FDO方法和RDA方法的估计性能都随输入信噪比的提高而提高;同样地,受非均匀环境的影响,FDA方法在任何输入信噪比的情况下仍难以获得较好的估计性能。从图4和图5可见,在严重非均匀情况下,本文提出的算法有更好的适用性。
为了检验在系统存在非理想因素下所提算法的性能,在不同阵元幅相误差存在的情况下进行了下面的实验。在图5所示的实验中,SNR=0dB,目标位置在主瓣内变化,阵元的幅相误差分别为σa=σp=0.01、σa=σp=0.03和σa=σp=0.05。由图可见,所提的RDA方法的估计性能明显优于FDA方法,这说明所提方法对阵元幅相误差更稳健。

图4 估计性能随输入SNR变化情况Fig.4 Comparison of the estimation performance versus different input SNR of the target

图5 幅相误差存在时估计性能随目标位置变化情况Fig.5 Comparison of the estimation performance versus varied positions of the target under the presence of amplitude and phase error
5 结 论
本文针对严重非均匀环境下及孤立干扰存在的情况下机载雷达动目标参数估计问题进行了仔细的分析,并提出了一种新方法。在严重非均匀环境下,传统单脉冲方法由于存在过多杂波剩余而无法得到准确估计,带STAP处理器的单脉冲方法由于无法得到准确的杂波、干扰协方差矩阵亦仅有较差的估计精度。由于新方法无需利用参考单元数据,因此在非均匀环境适用性、运算存储量、误差稳健性等方面都具有明显的优势。
[1]NickelU.Overviewofgeneralizedmonopulseestimation[J].IEEE Trans.on Aerospace & Electronic Systems, 2006, 21(6):27-56.
[2]NickelU,ChaumetteE,LarzabalP.Estimationofextendedtargetusingthegeneralizedmonopulseestimator:extensiontoamixedtargetmodel[J]. IEEE Trans.on Aerospace & Electronic Systems, 2013, 49(3): 2084-2096.
[3]ChenL,ShengWX,HanYB,etal.Animprovedadaptivemonopulsealgorithmbasedonsubspaceprojection[J]. Journal of Electronics & Information Technology, 2013, 35(9): 2100-2107.(陈亮,盛卫星,韩玉兵,等. 一种改进子空间投影自适应单脉冲算法[J].电子与信息学报, 2013, 35(9): 2100-2107.)
[4]LiRF,RaoC,DaiLY,etal.Algorithmforconstrainedadaptivesum-ddifferencemonopulseamongsub-arrays[J]. Journal of Huazhong University of Science & Technology (Natural Science Edition), 2013, 41(9):6-10.(李荣锋,饶灿,戴凌燕,等. 子阵间约束自适应和差单脉冲测角算法[J]. 华中科技大学学报(自然科学版), 2013, 41(9): 6-10.)
[5]ZhangZC,TaiXJ,MengQC,etal.Analysisontheeffectofmain/sidelobejammingonmonopulseangleestimate[J]. Radar Science and Technology,2012,10(2):207-211,216.(张忠传,邰新军,孟庆昌,等.主/旁瓣干扰对单脉冲测角的影响分析[J].雷达科学与技术,2012, 10(2): 207-211,216.)
[6]ChenCZ,WuJX,WangT,etal.Monopulseangleestimationwithadaptivearraybasedonmonopulseresponsecurvefitting[J].Systems Engineering and Electronics, 2013, 35(7): 1403-1408.(陈成增,吴建新,等.基于鉴角曲线拟合的自适应单脉冲测角方法[J].系统工程与电子技术,2013,35(7):1403-1408.)
[7]MelvinWL.ASTAPoverview[J].IEEE Trans.on Aerospace & Electronic Systems,2004,19(1):19-35.
[8]WangL,SuZG,WuRB.Linear-constraintbasedspace-timeadaptivemonopulseprocessingtechnique[J]. Journal of Electronics and Information Technology, 2010, 32(10): 2501-2505.(王璐,苏志刚,吴仁彪. 基于线性约束的空时自适应单脉冲技术[J]. 电子与信息学报,2010, 32(10):2501-2505.)
[9]ChenG,XieWC,WangYL.Space-timeadaptivemonopulseangleestimationapproachforairborneradarbasedonspace-timejointconstraint[J]. Acta Electronica Sinica, 2015, 43(3):489-495.(陈功,谢文冲,王永良. 基于空时联合约束的机载雷达STAP单脉冲角度估计方法[J]. 电子学报,2015,43(3):489-495.)
[10]WuRB,SuZG,WangL.Space-timeadaptivemonopulseproces-singforairborneradarinnon-homogeneousenvironments[J]. AEU International Journal of Electronics and Communications, 2011, 65(5): 258-264.
[11]XieW,ChenJ,WangYL.StudyonSTAPinnon-homogeneousclutterenvironment[C]∥IEEE Aerospace Conference, 2008: 1-6.
[12]TsakalidesP,NikiasCL.Robustspace-timeadaptiveprocessing(STAP)innon-Gaussianclutterenvironments[J]. IEE Proceedings, Radar, Sonar and Navigation, 1999, 146(2): 84-93.
[13]RabideauDJ,SteinhardtAO.Improvedadaptivecluttercancellationthroughdata-adaptivetraining[J]. IEEE Trans.on Aerospace & Electronic Systems, 1999, 35, 879-891.
[14]MelvinW,WicksMC.Improvedpracticalspace-timeadaptiveradar[C]∥Proc.of the National Radar Conference,1997:48-53.
[15]CristalliniD,BurgerW.ArobustdirectdatadomainapproachforSTAP[J]. IEEE Trans.on Signal Processing, 2012, 60(3): 1283-1294.
[16]LapierreF,VerlyJ,DroogenbroeckM.NewsolutionstotheproblemofrangedependenceinbistaticSTAPradars[C]∥Proc.of the IEEE Radar Conference, 2003:452-459.
[17]MichelsJ,HmedB,RangaswamyM.EvaluationofthenormalizedparametricadaptivematchedfilterSTAPtestinairborneradarclutter[C]∥Proc.of the IEEE Radar Conference, 2000: 769-774.
[18]GerlachK,PiccioloM.Airborne/spacebasedradarSTAPusingastructuredcovariancematrix[J]. IEEE Trans.on Aerospace & Electronic Systems, 2003, 39(1):269-281.
[19]GiniF.Knowledge-basedsystemsforadaptiveradar[J]. IEEE Signal Processing Magazine, 2006: 14-17.
[20]SuZG,ZhangKX,PengYN,etal.Rank-deficientAPESfilterforcomplexspectralestimation[C]∥Proc.of the IEEE Radar Conference, 2008: 26-30.
Direct data domain space-time adaptive monopulse method
WANG Lu, WU Ren-biao
(TianjinKeyLaboratoryforAdvancedSignalProcessing,CivilAviationUniversityofChina,Tianjin300300,China)
Space-time adaptive processing (STAP) for airborne radar combined with the monopulse technique can be used for estimating the spatial and temporal parameters of moving targets. However, in non-homogeneous environments, the clutter covariance matrix is difficult estimated accurately due to the amount of identically distributed training data is limited. As a result, the performance of optimum STAP and its modified versions dramatically decrease, especially those methods are failed. Additionally, in this case the effectively target detection and parameters estimation cannot be realized. A novel method is proposed for parameters adaptive estimation via no secondary data. This method calculates the covariance matrix by applying the amplitude and phase estimation (APES) filter in the primary data firstly. Then, by combining STAP technique with the monopulse theory, the ground clutter is suppressed and the estimation of angle and Doppler frequency is obtained. Simulation results show that the proposed method has the capability of adaptive clutter suppression and can achieve accurate parameter estimation performance compared with the conventional monopulse method. This method is outstanding in severe non-homogeneous environments, because it does not need any secondary data.
airborne radar; space-time adaptive processing (STAP); monopulse technique; non-homogeneous clutter
2015-12-22;
2016-06-23;网络优先出版日期:2016-07-18。
国家自然科学基金(61231017,U1333106);中央高校基本科研业务费(3122016D004)资助课题
TN 957.51
A
10.3969/j.issn.1001-506X.2016.12.09
王 璐(1984-),女,讲师,硕士,主要研究方向为阵列信号处理、自适应天线技术。
E-mail:luwang@cauc.edu.cn
吴仁彪(1966-),男,教授,博士,主要研究方向为自适应信号处理、谱估计方法。
E-mail:rbwu@cauc.edu.cn
网络优先出版地址:http://www.cnki.net/kcms/detail/11.2422.TN.20160718.1040.008.html
猜你喜欢
天文学报(2022年6期)2022-12-12
科学与信息化(2021年30期)2021-12-24
北京航空航天大学学报(2020年3期)2021-01-14
雷达学报(2017年3期)2018-01-19
华东师范大学学报(自然科学版)(2017年1期)2017-02-27
考试周刊(2016年54期)2016-07-18
自动化学报(2016年8期)2016-04-16
制导与引信(2016年3期)2016-03-20
西北工业大学学报(2015年3期)2015-12-14
遥测遥控(2015年2期)2015-04-23